Zaloguj
Zaloguj




Systemy realizujące funkcjonalność lokalizacji wewnątrz budynków, stosują różne algorytmy, techniki, częstotliwości i architektury, aby osiągnąć podstawową funkcjonalność lokalizacji wewnętrznej, czyli zapewnić lokalizację statycznego lub mobilnego zasobu lub osoby w bliskiej odległości.
Mogą gromadzić dane o lokalizacji, przy użyciu jednej lub więcej częstotliwości radiowych, w tym 125 kHz, 13,56 MHz, 433 MHz, 900 MHz, 2,4 GHz, 5 GHz lub UWB, które są zintegrowane z układem pasywnym, pasywnym wspomaganym bateryjnie lub aktywnym. Gromadzenie danych o lokalizacji w pomieszczeniach może używać komunikacji w świetle widzialnym (visible light communication, VLC), nawigację dźwiękową i namierzanie odległości (sonar) lub wykrywanie i określanie odległości z zastosowaniem lasera (lidar). Ponadto coraz większa liczba dostawców dodaje takie czujniki do kamer, aby uzupełnić wykrywanie, zwłaszcza w przypadku liczenia osób i kontroli dostępu.
Funkcjonalność UWB szybko wzrasta wraz z milionami dostaw chipów. Ludzie w Europie i USA już wchodzą w interakcję z UWB, nawet o tym nie wiedząc. Jeśli są właścicielami niektórych luksusowych samochodów, ich breloki już używają UWB do bezpiecznego odblokowania pojazdu. Jeśli pracują na produkcji, ich fabryki coraz częściej używają UWB do śledzenia części, narzędzi i ludzi. Jeśli idą do muzeum, ich przewodniki elektroniczne mogą korzystać z UWB, aby umożliwić precyzyjne wskazówki i komentarze. Te i inne zastosowania pokazują użyteczność UWB.
Technika została już wdrożona przez Apple w iPhonie 11, przez Samsunga w Galaxy Note 20 Ultra, a przez Xiaomi w systemach inteligentnego domu.
Metody lokalizacji w pomieszczeniach w czasie rzeczywistym RTLS (Real-Time Locating System) z użyciem sygnału radiowego, osiągnęły już stabilność i znane są eksperymentalne i komercyjne systemy lokalizacji. Zwykle ich opisy nie są łatwodostępne. Porównanie różnych sposobów lokalizacji w pomieszczeniach z użyciem sygnału radiowego, pokazuje tabela 1. Każdy z nich ma swoje zalety i wady dotyczące dokładności, ceny, zasięgu sygnału, skalowalności i tak dalej.

Istnieją trzy sposoby pomiaru odległości między dwoma urządzeniami z zastosowaniem sygnału radiowego. Pierwsza opiera się na RSSI (Received Signal Strength Indication), czyli wskazaniu poziomu odbieranego sygnału. Wiadomo, że siła sygnału spada wraz ze wzrostem odległości od nadajnika w sposób deterministyczny, oparty na formułach teoretycznych. Przy takim założeniu, można oszacować odległość między odbiornikiem a nadajnikiem. Jednak takie podejście ma kilka wad. Ponieważ otoczenie, a tym samym kanał radiowy, stale się zmieniają, zmienia się również parametr RSSI, co z kolei wprowadza niedokładność systemu. Parametr RSSI może być również degradowany przez propagację wielościeżkową i inne zjawiska, które są dość powszechne dla kanału radiowego.
Drugie rozwiązanie polega na wykrywaniu kierunku, z którego fala radiowa jest nadawana [S25]. W specyfikacji Bluetooth 5.1 zostały określone dwie metody dokładnej lokalizacji:
- Angle of Arrival (AoA), kąt odbioru – określany jest względny kierunek z którego fala radiowa nadawana przez pojedynczą antenę dociera do matrycy anten;
- Angle of Departure (AoD), kąt nadawania – określany jest względny kierunek z którego fala radiowa nadawana przez matrycę anten dociera do pojedynczej anteny.
Stosunkowo nową opcją jest użycie czasu lotu (propagacji) sygnału radiowego ToF (Time of Flight). Daje to dokładne wyniki w przypadku bezpośredniej widoczności nadajnika oraz odbiornika i może prowadzić do dokładności na poziomie centymetrów, w zależności od częstotliwości i charakteru sygnału. Jest to podejście stosowane w technologii Ultra Wideband (UWB). Łącząc pomiary ToF z kilku urządzeń, możemy uzyskać pozycję z dokładnością do kilku centymetrów. Charakter sygnałów UWB sprawia, że jest to idealny kandydat do zastosowania w procesie szacowania odległości. Wydajność może zostać obniżona, na przykład przez zasłonięcie pola widzenia między urządzeniami UWB.
Technika UWB
UWB (Ultra WideBand) to technika radiokomunikacji bazująca na wysyłaniu krótkotrwałych impulsów, gdzie czas trwania pojedynczego impulsu jest rzędu kilkudziesięciu pikosekund, a to pozwala uzyskać bardzo szerokie widmo emisji. System wykorzystuje pasma 3,1÷4,85 GHz oraz 6,2÷9,7 GHz (Direct Spread UWB) lub 3,1÷10,6 GHz (Mutli Band OFDM). Charakteryzuje się wysoką szybkością przesyłania danych (do 2 Gb/s) na niewielkich odległościach, rzędu 10 metrów. Pracuje na niskim poziomie mocy, co eliminuje interferencje z innymi systemami radiokomunikacyjnymi oraz pozwala budować urządzenia o niskim poborze mocy. Pomimo tego, że prędkość transmisji szybko spada w funkcji odległości, UWB ma spore szanse zastąpić w niedalekiej przyszłości połączenia kablowe między urządzeniami w domu, czy w biurze [1].
Technika UWB jest oparta o IEEE 802.15.4a – międzynarodowy standard definiujący warstwę fizyczną łącza radiowego UWB. Został on opracowany, aby umożliwić bardzo wysoką dokładność lokalizacji, zapewniając jednocześnie dwukierunkową komunikację do 27 Mb/s, w celu gromadzenia danych z czujników i sterowania elementami wykonawczymi. Standard zapoczątkowano w 2005 r. i ratyfikowano w 2007 r. W 2018 r. został ponownie zmodyfikowany do wersji 802.15.4z. Celem jest zwiększenie bezpieczeństwa warstwy fizycznej, ponieważ oczekuje się, że UWB będzie używana jako bezpieczna technologia bezprzewodowa transakcji, w branży motoryzacyjnej i mobilnej [2]. Kluczowe zmiany w standardzie 4z obejmują: całkowicie bezpieczny schemat określania odległości, dzięki zaszyfrowanej preambule i ramce danych; dodanie wyższych trybów szybkości transmisji danych do 27 Mb/s, z możliwością dużego zasięgu. Nowy standard zapewnia wsteczną kompatybilność z dotychczasowym standardem IEEE 802.15.4-2015.
Michael McLaughlin, współzałożyciel firmy Decawave, był członkiem zespołu inżynierów, który stworzył pierwszy standard. Zespół ten miał wizję, aby każdy połączony obiekt był „świadomy lokalizacji”, ponieważ wierzyli, że „odpowiedź na pytanie – gdzie?” wniesie ogromną wartość do aplikacji, takich jak Internet Rzeczy [3].
Jak Działa UWB
Technika UWB umożliwia bardzo dokładny pomiar czasu lotu sygnału radiowego ToF, co pozwala określić odległość/lokalizację z dokładnością do centymetrów. Oprócz tej wyjątkowej własności, UWB oferuje możliwość przesyłania danych przy bardzo niskim zużyciu energii – umożliwiając działanie baterii pastylkowej przez lata, bez konieczności ładowania lub wymiany. Łącząc dokładną lokalizację i komunikację, UWB oferuje również nowy sposób bezpiecznej komunikacji bezprzewodowej, otwierając drzwi dla nowych form bezpiecznych transakcji.
W przeciwieństwie do innych technologii, takich jak Bluetooth czy Wi-Fi, które są ponownie wykorzystywane do nowego celu, fizyczne właściwości sygnału radiowego UWB zostały od samego początku szczegółowo zdefiniowane, aby uzyskać ultra-dokładną i niezawodną lokalizację oraz komunikację w czasie rzeczywistym.
Wszystkie systemy oparte na czasie lotu ToF działają na podstawie określenia czasu, potrzebnego na propagację sygnału radiowego z nadajnika do odbiornika. Po dokładnym określeniu tego czasu można obliczyć odległość między nadajnikiem, a odbiornikiem, ponieważ znana jest prędkość propagacji fal radiowych w powietrzu. UWB wykorzystuje czas lotu ToF, jako metodę pomiaru odległości między dwoma nadajnikami/odbiornikami radiowymi, poprzez pomnożenie czasu lotu sygnału przez prędkość światła.
Istnieją trzy główne metody określania położenia znacznika obiektu w obszarze z zastosowaniem technologii UWB:
- TWR (Two Way Ranging) – metoda dwukierunkowej odległości,
- TDoA (Time Difference of Arrival) – metoda różnicy czasu odbioru,
- PDoA (Phase Difference of Arrival) – metoda różnicy faz odbioru.
W każdym systemie pozycjonowania z technologią UWB występują trzy urządzenia:
1. Znaczniki UWB (tag) – nazywane też transponderami
Są mocowane na osobach lub montowane na śledzonych przedmiotach, robotach, pojazdach itp. Przesyłają sygnał radiowy w określonych odstępach czasu. Mogą być również wyposażone w interfejsy danych i przesyłać szczegóły lokalizacji bezpośrednio do lokalnego systemu sterowania lub udostępniać je systemom wyższego poziomu.
2. Kotwice UWB (anchor) – nazywane też bramami
Są to urządzenia (punkty odniesienia) na stałe umieszczone w lokalnej infrastrukturze do lokalizowania w czasie rzeczywistym, z dokładnością mierzoną w centymetrach. Zapisują sygnały transpondera i nadają im stempel o ustalonej pozycji. Dane dotyczące pozycji są łączone i przesyłane do serwera lokalizacyjnego.
3. Menedżer Lokalizacji – nazywany też Serwerem RTLS
Jest to oprogramowanie, które oblicza w czasie rzeczywistym pozycję poszczególnych znaczników. Sygnały znaczników są grupowane przez bramki i odbierane przez menedżer (kontroler). Obliczona pozycja jest następnie przekazywana do inteligentnych systemów automatyki i jednostek produkcyjnych.
Określanie położenia z pomiarem czasu lotu ToF
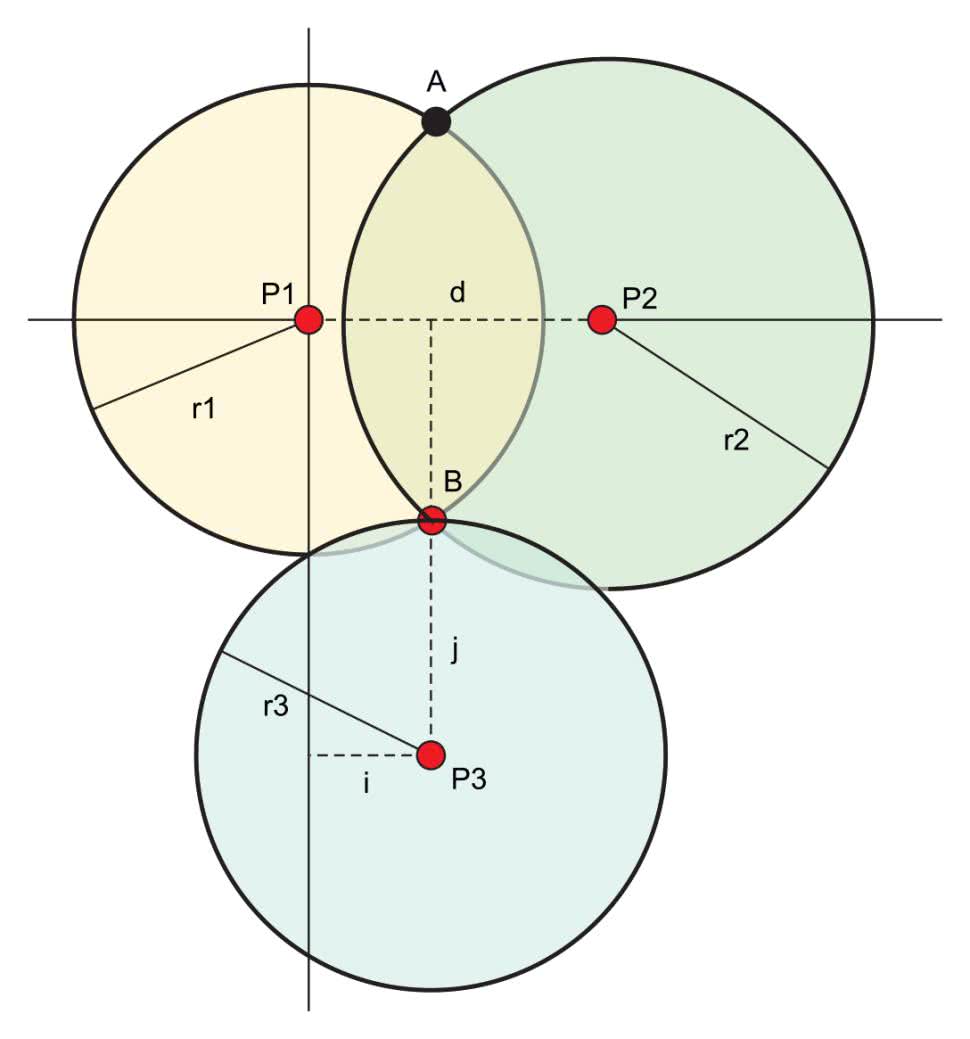
Zaimplementowanie pełnego RTLS wymaga zmierzenia odległości między oznaczonym obiektem, a kilkoma kotwicami umieszczonymi w znanych miejscach. Na rysunku 1 kotwica P1 oblicza odległość do znacznika B jako r1. To lokalizuje znacznik na okręgu o promieniu r1 od P1. Podobnie P2 oblicza odległość jako r2, umieszczając znacznik B na okręgu o promieniu r2 od P2, a ostatecznie P3 oblicza odległość jako r3, umieszczając znacznik na okręgu o promieniu r3 od P3. Obliczenie punktu przecięcia tych trzech okręgów (tri-lateracja), daje położenie znacznika B. Jeśli bezwzględne położenie kotwic jest znane w przestrzeni 2D lub 3D, wówczas znane jest również bezwzględne położenie oznaczonego obiektu.
Metoda różnicy czasu odbioru (TDoA)
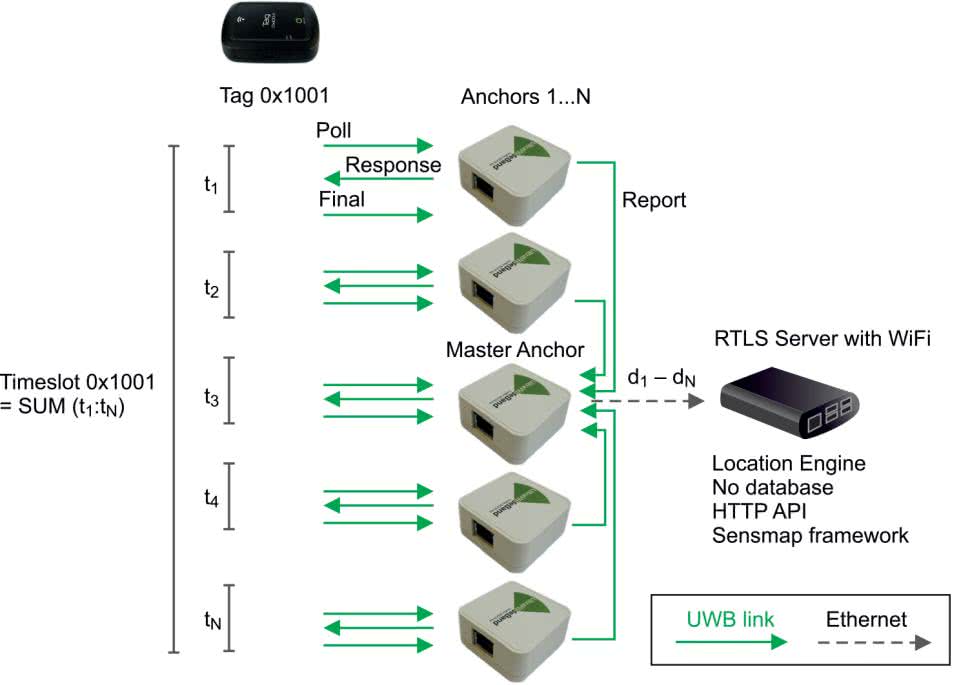
Metoda TDoA (Time Difference of Arrival) jest bardzo podobna do GPS. Opiera się na precyzyjnym pomiarze różnicy czasu między sygnałami docierającymi do kotwic. W tym schemacie kotwice muszą być dokładnie zsynchronizowane, muszą używać tego samego zegara. Wiele punktów odniesienia, zwanych kotwicami, jest rozmieszczonych w miejscu i zsynchronizowanych w czasie.
Znaczniki przesyłają w regularnych odstępach czasu (częstotliwość odświeżania) krótki komunikat Blink. Taka wiadomość jest przetwarzana przez wszystkie kotwice w zasięgu komunikacji. Niezależnie od statusu synchronizacji, kotwice wysyłają wszystkie znaczniki czasu do serwera RTLS, przez sieć Ethernet. Aby obliczyć pozycję znacznika, serwer RTLS bierze pod uwagę tylko znaczniki czasu, pochodzące z co najmniej trzech kotwic o tej samej podstawie zegara.
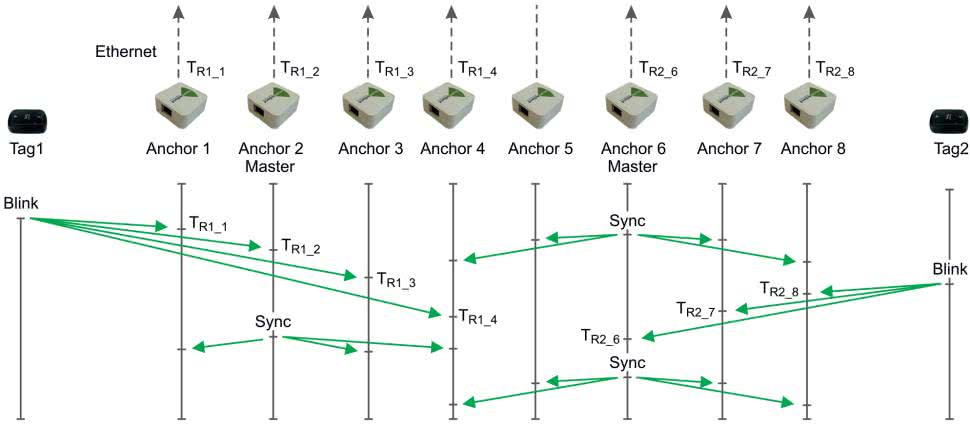
Na tej podstawie serwer RTLS wykonuje obliczenia współrzędnych X, Y, Z znaczników. Synchronizacja odbywa się bezprzewodowo, automatycznie wybierane są kotwice o optymalnym zasięgu, zwane kotwicami głównymi. Wysyłają one w regularnych odstępach czasu sygnał synchronizacji transmisji. Kotwice w zakresie komunikacyjnym kotwicy głównej definiują komórki, w których wszystkie kotwice pracują na tej samej podstawie zegara przez określony czas. Często zdarza się, że niektóre kotwice są synchronizowane przez więcej kotwic głównych, jak pokazano na rysunku 2.
Metoda TDoA wykazuje wiele zalet:
- Znacznik nie komunikuje się z kotwicami indywidualnie, nie zna ich zakresu adresowania. Prowadzi to do znacznego wydłużenia żywotności baterii, ponieważ znacznik musi wysłać tylko jeden komunikat Blink, aby być zlokalizowanym w przestrzeni (w metodzie TWR do lokalizacji znacznika wymagana jest wymiana wielu komunikatów). Dlatego żywotność baterii znaczników może zostać odpowiednio wydłużona, np. do 7 lat (CR2032 – częstotliwość aktualizacji 0,1 Hz);
- Ponieważ nie ma wcześniejszego powiązania adresu między znacznikami i kotwicami, liczba kotwic działających w systemie jest w pełni skalowalna. Dodanie większej liczby kotwic do systemu nie wymaga żadnej rekonfiguracji znaczników, nawet serwera RTLS;
- Znaczniki używają tylko krótkiego czasu do wysłania komunikatu Blink, dlatego duża liczba znaczników (nawet tysiące) może przesyłać sygnał w ramach jednej częstotliwości odświeżania. RTLS, oparty na metodzie TDoA, jest więc w pełni skalowalny pod względem liczby obsługiwanych znaczników przez system.
Metoda dwukierunkowej odległości (TWR)
Metoda TWR (Two Way Ranging) polega na dwukierunkowej komunikacji między dwoma urządzeniami. Podczas komunikacji, urządzenia mierzą również czas przelotu sygnału radiowego UWB między nimi. Następnie obliczana jest odległość między węzłami, mnożąc czas przez prędkość światła. Proces TWR jest stosowany między znacznikiem, a odpowiednią kotwicą. Tylko jedna kotwica może być zaangażowana w TWR w danym przedziale czasowym.
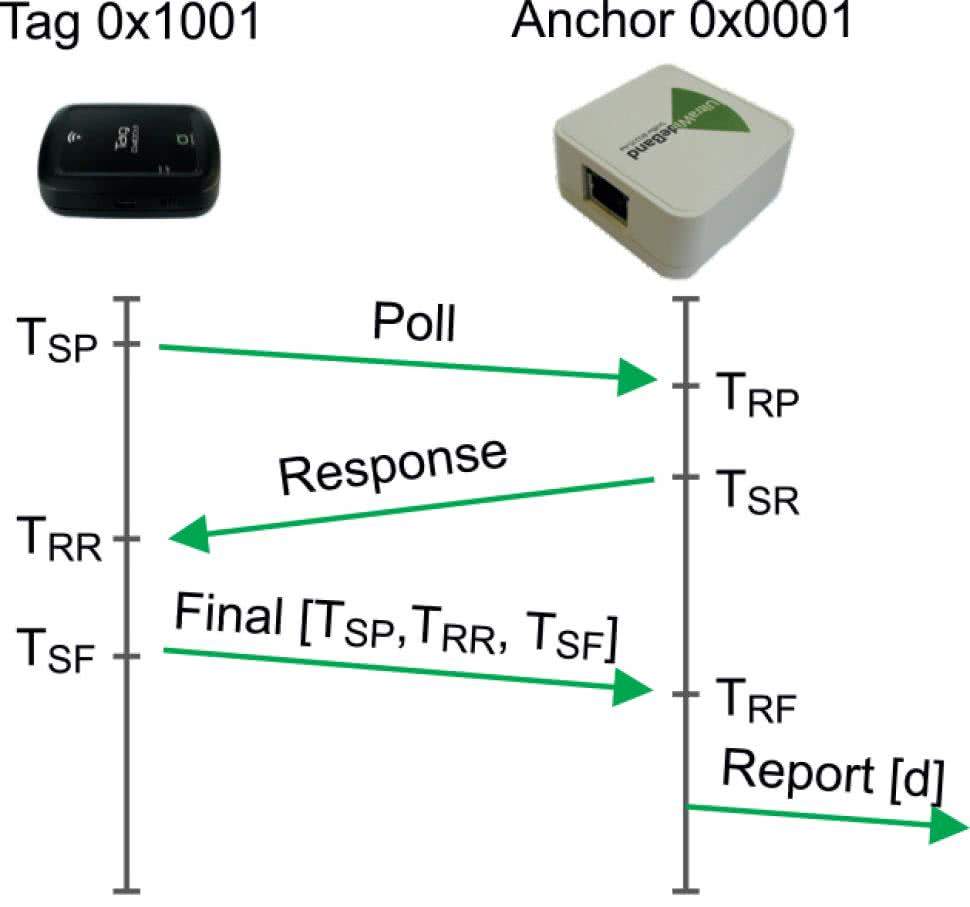
Aby zmierzyć odległość, należy wymienić trzy komunikaty (rysunek 3). Znacznik inicjuje TWR, wysyłając wiadomość Poll na znany adres kotwicy, w czasie określonym w TSP (Time of Sending Poll). Kotwica rejestruje czas odbioru synału Poll (TRP) i odpowiada komunikatem odpowiedzi w czasie TSR. Znacznik, po odebraniu komunikatu odpowiedzi, rejestruje czas TRR i tworzy komunikat końcowy, w którym zawarte są jego informacje ID, TSP, TRR, TSR. Na podstawie czasu odbioru komunikatu końcowego TRF i informacji zawartych w komunikacie końcowym, kotwica może określić TOF sygnału UWB.
ToF=[(TRR-TSP)-(TSR-TRP)+(TRF-TSR)-(TSF-TRR)]/4
Odległość = ToF × (speed of light)
Opcjonalnie, wynikowa odległość może zostać wysłana w wiadomości raportu, z powrotem do znacznika lub dowolnego urządzenia UWB w sąsiedztwie. Eksperyment wykazał, że optymalna odległość między znacznikiem, a kotwicą do procesu TWR, jest w zasięgu 20…30 metrów [5].
Lokalizacja oparta na TWR
Systemy RTLS oparte na metodzie TWR wykorzystują fakt, że nie jest potrzebna synchronizacja czasu między urządzeniami UWB. Z drugiej strony taka cecha ogranicza skalowalność systemu RTLS, ponieważ proces TWR jest stosowany stopniowo ze wszystkimi kotwicami w systemie. Ponadto znaczniki muszą znać adresy kotwic, aby stopniowo sondować wszystkie dostępne kotwice. Sytuację tę ilustruje rysunek 4.
Opierając się na schemacie TWR, można zaimplementować lokalizację 2D lub nawet 3D, metodą triangulacji. Aby obliczyć lokalizację jednego znacznika, trzeba uruchomić proces TWR, ze wszystkimi kotwicami w systemie. Dlatego długość przedziału czasowego niezbędnego do zakończenia wszystkich procedur TWR, zależy odpowiednio od liczby kotwic w systemie RTLS. W zależności od liczby znaczników działających w systemie RTLS, w ramach jednej częstotliwości odświeżania, należy zarezerwować odpowiednią liczbę przedziałów czasowych. Zgodnie z tym założeniem, liczba działających znaczników (setki) i żywotność baterii, jest ograniczona przez wymaganą częstotliwość odświeżania i liczbę kotwic w systemie.
Odległość komunikacyjna kotwic może wynosić od 20 do 40 metrów, w zależności od środowiska wewnętrznego.
Metoda różnicy faz odbioru (PDoA)
Metoda PDoA (Phase Difference of Arrival) polega na połączeniu schematu TWR, który podaje odległość między dwoma urządzeniami z określeniem namiaru/kierunku (bearing) między dwoma urządzeniami (rysunek 5).
W tym celu jedno z urządzeń (zwykle kotwica) posiada dwie anteny (lub więcej) i jest w stanie zmierzyć różnicę faz odbioru sygnału RF. Na tej podstawie obliczany jest kierunek (kątowy) lokalizacji drugiego urządzenia. Podobnie działa metoda kąta odbioru (AoA) w standardzie Bluetooth 5.1 [S25]. Połączenie odległości i namiaru, umożliwia obliczenie względnego położenia dwóch urządzeń bez żadnej innej infrastruktury.
Zaletą metody jest zredukowany schemat lokalizacji infrastruktury. Jednak błąd lokalizacji jest zależny od odległości między dwoma urządzeniami. Schematy PDoA nie radzą sobie dobrze z propagacją wielodrogową między nadajnikiem, a układem anten odbiornika.
Układy scalone i moduły firmy Decawave (Qorvo)
Firma Qorvo, wiodący dostawca innowacyjnych rozwiązań RF, ogłosiła 24 lutego 2020 r., że sfinalizowała przejęcie firmy Decawave, pioniera w technologii ultraszerokopasmowej (UWB) i dostawcy rozwiązań UWB dla aplikacji mobilnych, motoryzacyjnych i IoT. Firma Decawave z siedzibą w Dublinie w Irlandii, została założona w 2007 roku i wdrożyła ponad 8 milionów chipsetów, w ponad 40 różnych branżach – od smartfonów po drony.
Układ DW1000 firmy Decawave (Qorvo) to pierwszy na świecie jednoukładowy, bezprzewodowy nadajnik-odbiornik, oparty na technice UWB [6].
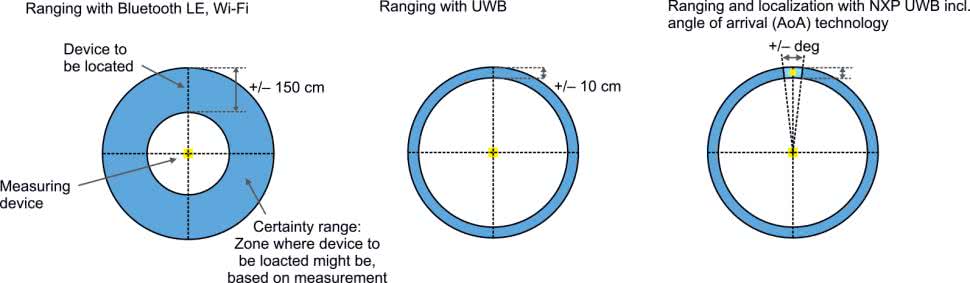
Układ umożliwia opracowywanie opłacalnych rozwiązań RTLS, z precyzyjnym pozycjonowaniem wewnątrz i na zewnątrz, z dokładnością do 10 cm.
Jest to nowe podejście do systemów lokalizacji w czasie rzeczywistym i systemów pozycjonowania w pomieszczeniach, usług opartych na lokalizacji, bezprzewodowych sieci czujników oraz Internetu rzeczy, zapewniając dokładną informację o lokalizacji oraz komunikację.
DW1000 składa się z analogowego interfejsu zawierającego odbiornik i nadajnik oraz cyfrowej logiki, która jest łączona z zewnętrznym procesorem. Przełącznik TX/RX służy do podłączenia odbiornika lub nadajnika do portu anteny. W chipie znajdują się monitory temperatury i napięcia (rysunek 6).
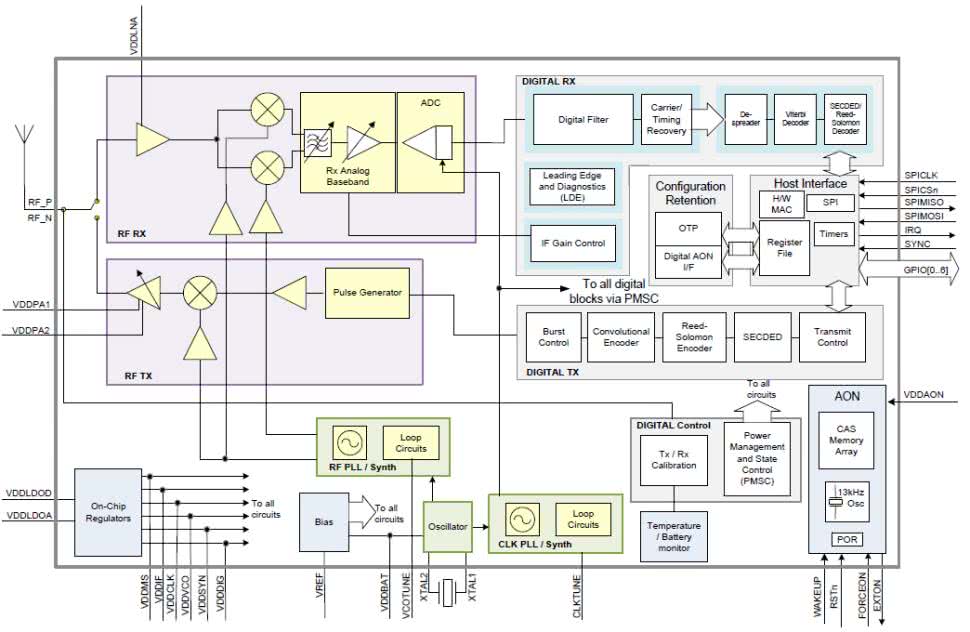
Odbiornik składa się z interfejsu radiowego, który wzmacnia odbierany sygnał we wzmacniaczu o niskim poziomie szumów, a następnie konwertuje go bezpośrednio na pasmo podstawowe. Zoptymalizowany jest pod kątem szerokiego pasma, liniowości i współczynnika szumów. Umożliwia to konwersję w dół każdego z obsługiwanych kanałów UWB, przy minimalnym dodatkowym szumie i zniekształceniach. Sygnał pasma podstawowego jest demodulowany, a otrzymane dane są udostępniane zewnętrznemu kontrolerowi, za pośrednictwem interfejsu SPI.
Ciąg nadawanych impulsów jest generowany poprzez zakodowane cyfrowo dane transmisji do analogowego generatora impulsów. Jest następnie konwertowany w górę, przez podwójnie zbalansowany mikser, na nośną, generowaną przez syntezator i wyśrodkowany na jednym z dozwolonych kanałów UWB. Zmodulowany sygnał radiowy jest wzmacniany przed transmisją do anteny zewnętrznej.
Układ scalony ma wbudowaną pamięć jednorazowego programowania (OTP), która może być używana do przechowywania danych kalibracyjnych, takich jak poziom mocy TX, regulacja początkowego błędu częstotliwości kwarcu i regulacja dokładności zakresu (mogą być automatycznie pobierane w razie potrzeby). Pamięć Always-On (AON) może być używana do przechowywania danych konfiguracyjnych DW1000, w stanach operacyjnych najniższej mocy, gdy regulatory napięcia układu są wyłączone. Dane te są przesyłane i pobierane automatycznie. Korzystanie z pamięci AON jest konfigurowalne.
Schemat taktowania DW1000 oparty jest na 3 obwodach głównych: oscylator kwarcowy, zegar PLL i RF PLL. Oscylator na chipie jest przeznaczony do pracy z częstotliwością 38,4 MHz, przy użyciu zewnętrznego kwarcu. Zegar PLL (oznaczony jako CLKPLL) generuje sygnał, wymagany przez układy cyfrowe do przetwarzania sygnału. RF PLL generuje lokalny oscylator konwersji w dół (LO), dla łańcucha odbiorczego, i konwersji w górę, dla łańcucha nadawczego. Dostępny jest wewnętrzny oscylator 13 kHz, do użytku w stanie SLEEP.
Interfejs hosta zawiera interfejs SPI 20 MHz (tylko slave) do komunikacji i konfiguracji układu. Zaimplementowano szereg funkcji stosu MAC, w tym generowanie CRC, sprawdzanie CRC i filtrowanie ramek odbiorczych.
Układ DW1000 jest wykonany w technologii CMOS 90 nm i posiada następujące cechy [6] (rysunek 6):
- zgodność ze standardem IEEE802.15.4-2011,
- komunikacja 110 kb/s, 850 kb/s, 6,8 Mb/s,
- 6 kanałów FDMA częstotliwości w zakresie 3,5…6,5 GHz,
- moc nadawania programowana od –14…–10 dBm,
- dokładność lokalizacji: do 10 cm,
- do 11000 znaczników w promieniu 20 m,
- zasięg do 290 m (110 kbps, 10% PER),
- zasilanie 2,8…3,6 V,
- pobór mocy: nadawanie 31 mA, odbiór 64 mA, tylko watchdog 2 µA, stan głębokiego uśpienia 100 nA.
Platforma RTLS firmy Sewio jest oparta na układzie scalonym DW1000 firmy Decawave [4].
Moduł DWM1000 firmy Decawave integruje układ scalony DW1000, antenę, moduł zarządzania energią i sterowania zegarem, co upraszcza integrację projektu.
Moduł DWM1001C firmy Decawave łączy natomiast układy scalone DW1000 i nRF52832 firmy Nordic Semiconductor oraz 3-osiowy akcelerometr (zdjęcie tytułowe). Każdy moduł można skonfigurować jako kotwicę lub znacznik RTLS, a dodatkowo może działać jako urządzenie bramy sieciowej.
Bluetooth LE oferuje dojrzałą i wyrafinowaną bazę oprogramowania, gwarantującą współdziałanie UWB, a także bardzo niskie zużycie energii TX i RX. Układ SoC firmy Nordic Semico zastosowano w celu zminimalizowania zużycia energii i „wybudzenia” transceiver-a UWB w razie potrzeby, oszczędzając moc w krytycznych scenariuszach asynchronicznego wykrywania/łączenia.
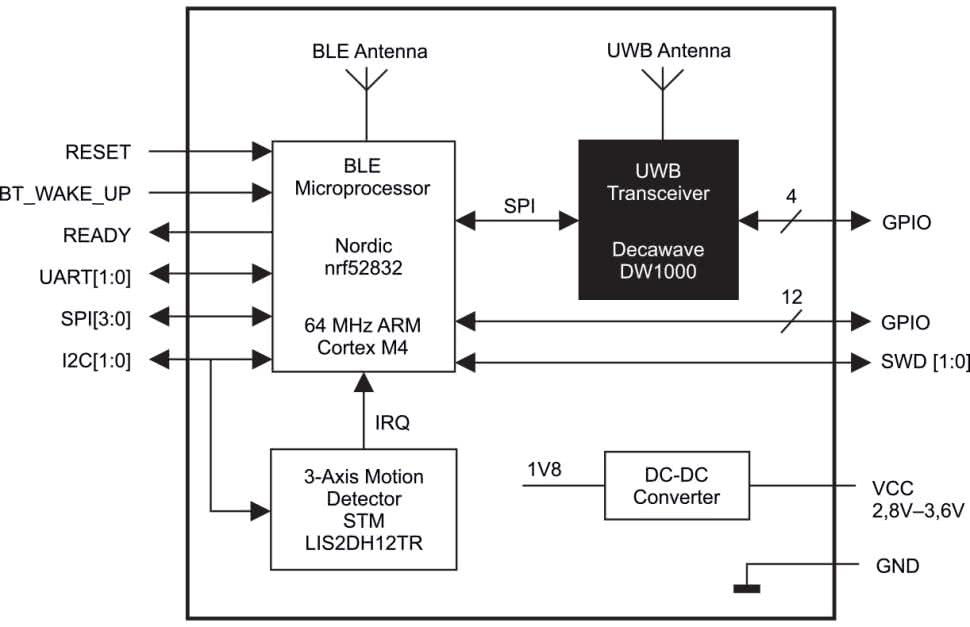
Cechy modułu [6] (rysunek 7):
- umożliwia budowanie skalowalnych systemów TWR RTLS do tysięcy tagów (ten sam moduł służy do projektowania kotwic, tagów i bram sieciowych),
- wbudowane oprogramowanie wewnętrzne DRTLS ogranicza/ułatwia tworzenie oprogramowania,
- wbudowany Bluetooth,
- wbudowany czujnik ruchu,
- szybkość transmisji danych kanału 5 (6,5 GHz)/6,8 Mb/s,
- zasilanie 2,8…3,6 V,
- pobór mocy: głębokie uśpienie 4 µA, RTC + akcelerometr 12 µA; oczekiwanie (oba układy) 13 mA, TX (średni) 82 mA/111 mA (max), RX (średni) 134 mA/154 mA (max), BLE 6 mA;
- rozmiar 19×26×2,6 mm, 34-pinowe wyprowadzenia boczne.
Dostępna jest też fabryczna płytka rozwojowa DWM1001-DEV oraz zestaw uruchomieniowy MDEK1001 Development Kit.
Firmy Nordic Semiconductor i Qorvo ogłosiły 25 czerwca 2020 r., że rozszerzają swoje partnerstwo o podwójne rozwiązania łączności UWB i Bluetooth Low Energy (Bluetooth LE). Przyszłe produkty UWB/Bluetooth LE zaprojektowane wspólnie przez Nordic i Qorvo, będą łączyć transceiver UWB firmy Qorvo z układem nRF52833 firmy Nordic Semiconductor, obsługującym Bluetooth 5.2 LE, wyszukiwanie kierunku i siatkę Bluetooth.
Moduł DWM1004C łączy w sobie układ scalony DW1000 oraz STM32L (ARM Cortex-M0+, 32 kB Flash) firmy ST Microelectronics. Obsługuje kanały CH 2 (4 GHz) oraz CH 5 (6,5 GHz) i zapewnia kryptografię AES.
Moduł DWM3000 zawiera układ scalony DW3110 z obsługą standardu IEEE802.15.4z-2020 (tryb BPRF), antenę i zarządzanie energią. Zapewnia globalną obsługę UWB z kanałami UWB 5 (6,5 GHz) i CH9 (8 GHz). Obsługuje schematy lokalizacji ToF, TWR i TDoA. Jest dostępna płytka Arduino DWS3000 z tym modułem.
Układy scalone firmy NXP
Na corocznej konferencji deweloperów NXP Connects 20 października 2020 r., firma NXP Semiconductors ogłosiła przełom w ustanowieniu bezpiecznej technologii ultraszerokopasmowej (UWB), jako światowego standardu precyzyjnego wykrywania. Po wprowadzeniu mobilnych i samochodowych rozwiązań UWB, firma NXP rozszerzyła swoją ofertę o nowe układy scalone UWB.
Układy scalone Trimension SR040 i SR150 są zoptymalizowane pod kątem nowych zastosowań IoT, takich jak inteligentne zamki i znaczniki systemu lokalizacji w czasie rzeczywistym (RTLS), zapewniając „położenie względne”, z bardzo wysokim poziomem dokładności. Trimension to nowa nazwa marki sprawdzonej platformy UWB NXP – obejmującej rozwiązania zaprojektowane z myślą o specyficznych potrzebach rynków motoryzacyjnych, mobilnych i IoT. Trimension SR150 i SR040 umożliwiają pozycjonowanie i wykrywanie, zoptymalizowane pod kątem przypadków użycia Internetu Rzeczy. Zaprojektowano je z myślą o zgodności z certyfikacją konsorcjum FiRa.
Układ scalony Trimension SR150 zaprojektowany z myślą o specyficznych potrzebach urządzeń IoT, obsługuje technologię UWB, zgodnie ze standardem IEEE 802.15.4z, z dokładnością do 10 m oraz detekcję kąta odbioru (AoA), z dokładnością do 3 stopni, dla dodatkowego wzmocnienia poziomu precyzji. Trimension SR150 idealnie nadaje się do obsługi UWB wszelkiego rodzaju większych infrastruktur, takich jak instalacje kontroli dostępu, konfiguracje lokalizacji w pomieszczeniach i schematy płatności, a także elektronika użytkowa. Kilka urządzeń IC SR150 można umieścić w pomieszczeniu jako kotwice UWB, aby pomóc w lokalizowaniu poruszających się ludzi i obiektów.
Układ scalony Trimension SR040 zoptymalizowany do pracy przy niskim poborze mocy, jest przeznaczony do użytku w zasilanych bateryjnie urządzeniach IoT, w tym znacznikach lokalizacji i śledzenia UWB. Posiada zintegrowany stos firmowy MAC, zgodny z przyszłą certyfikacją konsorcjum FiRa. Używany jako znacznik TDoA, może wysyłać tylko pakiety Blink. Układ może być zintegrowany z układami Bluetooth Low Energy lub innymi kontrolerami łączności w jednym urządzeniu.
Układ scalony Trimension OL23D0 uzupełnia gamę dedykowanych rozwiązań IoT jako otwarty, w pełni programowalny kontroler UWB, zgodny z IEEE 802.15.4z. Posiada zintegrowany mikrokontroler ARM Coetrex oraz pamięć Flash. Jest zoptymalizowany do pracy z niskim poborem mocy, do zastosowań baterynych.
Układ scalony Trimension SR100T zapewnia niezwykle precyzyjne pozycjonowanie, dostosowane do urządzeń mobilnych nowej generacji z obsługą UWB.
Układ scalony Trimension NCJ29D5 to pierwszy z nowej generacji układów scalonych UWB, zaprojektowanych specjalnie celem spełnienia wymagań w zakresie łączności i bezpieczeństwa w przemyśle motoryzacyjnym.
Po raz pierwszy dostęp do samochodu za pomocą smartfona daje ten sam poziom wygody, co najnowocześniejsze breloki do kluczy. Użytkownicy mogą otwierać i uruchamiać samochody, pozostawiając telefony w kieszeniach lub torbach i korzystać z bezpiecznego zdalnego parkowania za pomocą smartfona. Ponadto, nowy układ scalony UWB zapewnia maksymalny poziom ochrony przed kradzieżą samochodu poprzez ataki przekaźnikowe.
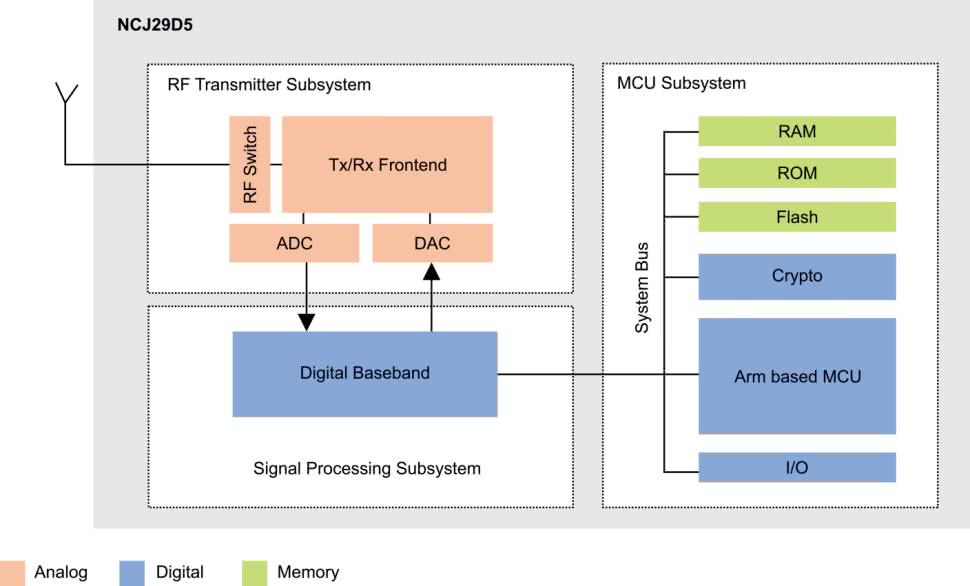
Układ Trimension NCJ29D5 posiada następujące cechy (rysunek 8) [XX]:
- zgodny ze standardem IEEE 802.15.4z oraz wstecznie z poprzednim standardem IEEE802.15.4-2011,
- komunikacja 110 kb/s, 850 kb/s, 6,8 Mb/s,
- praca w zakresie częstotliwości 6,0…8,5 GHz,
- rdzeń ARM Cortex,
- dokładność lokalizacji: do 10 cm w środowisku z zakłóceniami,
- pobór mocy: nadawanie 31 mA, odbiór 64 mA, tylko watchdog 2 µA, stan głębokiego uśpienia 100 nA.
Moduły z układami Trimension firmy NXP
Moduł ASMOP1BO0R1 firmy Amotech, bazujący na układzie Trimension SR150 UWB firmy NXP, jest wyposażony w gniazdko antenowe oraz antenę. Zintegrowany układ scalony nadajnika-odbiornika bezprzewodowego, zarządzanie energią oraz sterowanie zegarem, upraszczają integrację projektu i eliminują wymagania projektowania układów RF. Niski pobór mocy modułu pozwala na długotrwałą pracę z baterii.
Moduł ASMOP1CO0R1 firmy Amotech, bazujący na układzie Trimension SR040 UWB firmy NXP, jest wyposażony w gniazdko antenowe. Może pracować w układach RTLS, z dokładnością do 10 cm oraz transmisją danych do 7,8 Mb/s.
Moduł ASMOP1CO0A1 firmy Amotech bazujący na układzie Trimension SR040 UWB firmy NXP jest wyposażony we wbudowaną antenę.
Siemens
Siemens przejął w roku 2018 niemiecką firmę Agilion, producenta bezprzewodowych rozwiązań lokalizacyjnych. Dzięki temu rozszerzył własną ofertę w zakresie systemów lokalizacji, działających w czasie rzeczywistym (RTLS), które wykorzystują komunikację UWB i są używane w automatycznych pojazdach, pracujących w zakładach przemysłowych (automated guided vehicles, AGVs). Pojazdy takie są częścią działającego płynnie zaopatrzenia produkcyjnego i elementem systemów magazynowych.
Systemy lokalizacji pojazdów, działające z centymetrową dokładnością i ciągłym odczytem pozycji (real time), oraz modele 3D otoczenia i sprzętu na hali produkcyjnej, są niezbędne w tego typu zastosowaniach. Wykorzystuje się je także w robotach współpracujących z ludźmi [11]. Firmowy system SIMATIC RTLS składa się z transponderów dołączonych do śledzonych obiektów, bramek zainstalowanych w pomieszczeniach oraz wspólnego systemu oprogramowania, który oblicza w czasie rzeczywistym pozycję poszczególnych transponderów.
Standaryzacja
W roku 2018 została założona globalna organizacja non-profit UWB Alliance, której celem jest zrzeszenie dostawców technologii, programistów i klientów tworzących branżę UWB [8]. Firma Decawave była członkiem-założycielem Sojuszu, wraz z firmami takimi jak Hyundai, Kia, Zebra, Alteros, Novelda i Ubisense. UWB Alliance promuje wdrażanie technologii UWB na dużą skalę, wspierając ochronę i rozwój środowiska regulacyjnego dla technologii UWB, zapewniając centrum doskonałości w zakresie edukacji i współistnienia UWB, jednocześnie wspierając współpracę z interoperacyjnymi specyfikacjami i standardami.
Konsorcjum FiRa jest organizacją non-profit, która promuje wykorzystanie technologii ultraszerokopasmowej, w zastosowaniach takich jak: kontrola dostępu, usługi oparte na lokalizacji i usługi typu urządzenie-urządzenie [7].
Zostało założone w roku 2019 przez firmy Allegion (Schlage), ASSA ABLOY (HID Global), Bosch, NXP Semiconductors, Qorvo (Decawave) oraz Samsung. Konsorcjum FiRa, z siedzibą w Beaverton w stanie Oregon, jest organizacją, zajmującą się opracowywaniem i powszechnym wdrażaniem bezproblemowych doświadczeń użytkowników przy użyciu zabezpieczonych możliwości precyzyjnego określania zasięgu i pozycjonowania technologii UWB.
W maju 2020 roku konsorcjum opublikowało swoje pierwsze specyfikacje wymagań technicznych dla warstw UWB PHY i MAC. Specyfikacje posłużą jako podstawa nadchodzącego programu certyfikacji konsorcjum, aby zapewnić zgodność operacyjną między chipsetami, urządzeniami i rozwiązaniami.
Organizacje UWB Alliance i FiRa Consortium ogłosiły 30 czerwca 2020 r. formalne porozumienie, w celu przyspieszenia rozwoju i przyjęcia technologii UWB.
Podsumowanie
W Europie i USA użytkownicy niektórych luksusowych samochodów już wchodzą w interakcję z UWB, nawet o tym nie wiedząc. Ich inteligentne kluczyki używają UWB do bezpiecznego odblokowania pojazdu. Nowe funkcje techniczne udostępniane przez UWB, w połączeniu ze smartfonem, mogą zapewnić nie tylko bezpieczniejszy dostęp, ale także nowe usługi, takie jak zlokalizowanie pojazdu na parkingu.
Systemy RTLS z techniką UWB mogą być bardzo pomocne w czasach pandemii COVID-19. Na przykład, system SIMATIC RTLS firmy Siemens umożliwia pomiar, monitorowanie i utrzymywanie bezpiecznej odległości pomiędzy poszczególnymi pracownikami. Korzystając z przenośnych transponderów, które współdziałają z urządzeniami infrastruktury, można również monitorować ruchy pracowników.
Nowa aplikacja SieTrace, pomaga również w zachowaniu dystansu między pracownikami. Przetwarza dane o lokalizacji transponderów za pomocą algorytmu, rozpoznaje odległości między pracownikami i wyzwala sygnał alarmowy do wszystkich zaangażowanych grup osób, jeśli odległość jest mniejsza niż 1,5 metra. Pozwala również na śledzenie kontaktów za pomocą oprogramowania monitorującego RTLS, które przechowuje historię ruchów pracowników [11]. I tu pojawia się obawa dotycząca zachowania prywatności śledzonych pracowników. Kto ma dostęp do takich danych i w jakim celu?
Henryk A. Kowalski
Instytut Informatyki
Politechnika Warszawska
[S25] Dokładna lokalizacja w pomieszczeniach w standardzie Bluetooth v5.1, EP 4/2019
Literatura
[1] UWB (ang. Ultra WideBand), Wikipedia, http://bit.ly/3r7rTYJ
[2] IEEE 802.15.4z-2020 – IEEE Standard for Low-Rate Wireless Networks-Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques, 2020-08-25, http://bit.ly/3apE8dq
[3] Decaware, Our technology, http://bit.ly/2WpjGkF
[4] Time Difference of Arrival, Sewio, http://bit.ly/37uzpoI
[5] Two Way Ranging, Sewio, http://bit.ly/3nKnk4J
[6] DW1000 Radio IC, Decawave (Qorvo), http://bit.ly/34qRK4b
[7] FiRa Consortium, http://bit.ly/2LG6eGK
[8] UWB Alliance, http://bit.ly/3p5qoZj
[9] Ultra-Wideband (UWB), NXP, http://bit.ly/2WtgkNC
[10] Secure Ultra-Wideband (UWB), http://bit.ly/3p4VLTU
[11] SIMATIC RTLS – Real-time locating system, http://sie.ag/38kDtar
[12] How to compare different RTLS technologies?, 26 November 2018, Quuppa, http://bit.ly/2CIBNbD