 Zaloguj
Zaloguj




Przygotowanie oprogramowania wbudowanego w tradycyjny sposób, wymaga dużego nakładu czasu oraz środków, co przy coraz krótszym czasie życia produktu oraz konieczności szybkiego wprowadzania produktu na rynek jest obecnie nie do zaakceptowania. Aby w rozsądnym czasie podołać współczesnym wymaganiom narzucanym przez rynek, tworząc oprogramowanie dla mikrokontrolerów należy skorzystać z bibliotek zewnętrznych, a dodatkowo pomocne jest również skorzystanie z systemu operacyjnego dedykowanego dla mikrokontrolerów, który znacznie upraszcza strukturę programu.
Prawie dekadę temu, gdy systemy operacyjne nie były jeszcze tak popularne, na łamach Elektroniki Praktycznej przedstawiłem cykl artykułów na temat systemu operacyjnego ISIX mojego autorstwa. Od tego czasu jednak wiele się zmieniło. Ciągły rozwój sprzętu, bibliotek, oprogramowania narzędziowego oraz samego systemu ISIX spowodował, że system doczekał się nowej odsłony w wersji III, która z pierwotną wersją (oprócz założeń) nie ma wiele wspólnego.
Głosy napływające od czytelników zebrane w poprzednim cyklu artykułów spowodowały, że wszystkie przykłady zrealizowane w ramach tego kursu zostaną przygotowane dla popularnych i tanich zestawów fabrycznych produkcji ST, bez konieczności lutowania, kupowania programatorów itp. Potrzebny będzie jedynie zestaw STM32Discovery, kabel USB, umożliwiający dołączenie zestawu do komputera, oraz ewentualnie przejściówka Serial na USB, umożliwiająca dołączenie portu szeregowego mikrokontrolera do komputera PC. Przejściówka będzie potrzebna jednie dla zestawu z STM32F411-DISCO posiadającego zintegrowany programator STLINK w wersji 2.0. Pozostałe zestawy wyposażone w programator STLINK2-1 nie wymagają dołączania zewnętrznego konwertera.
W przykładach zostaną wykorzystane następujące zestawy:
- STM411-DISCO + Przejściówka serial na USB pracująca w standardzie napięciowym 3,3 V.
- STM32F469-DISCO.
- STM32F769-DISCO.
Podstawowym zestawem wykorzystywanym do realizacji przykładów będzie zestaw pierwszy, natomiast w przypadku bardziej zaawansowanych przykładach prezentujących biblioteki graficzne czy połączenia sieciowe wykorzystywać będziemy zestaw 2) oraz 3).
Minimalne wymagania systemowe jakie są potrzebne aby uruchomić system operacyjny ISIX w wersji III przedstawiają się następująco:
- procesor: ARM Cortex-M0, -M3, -M4, -M7,
- RAM: 4 kB,
- Flash: 16 kB,
- częstotliwość taktowania rdzenia: 1 MHz.
Naturalnie, aby uzyskać pełną funkcjonalność, na przykład – obsługę sieci czy wyświetlaczy graficznych, będzie potrzebny mikrokontroler o większych zasobach.
Budowa systemu ISIX
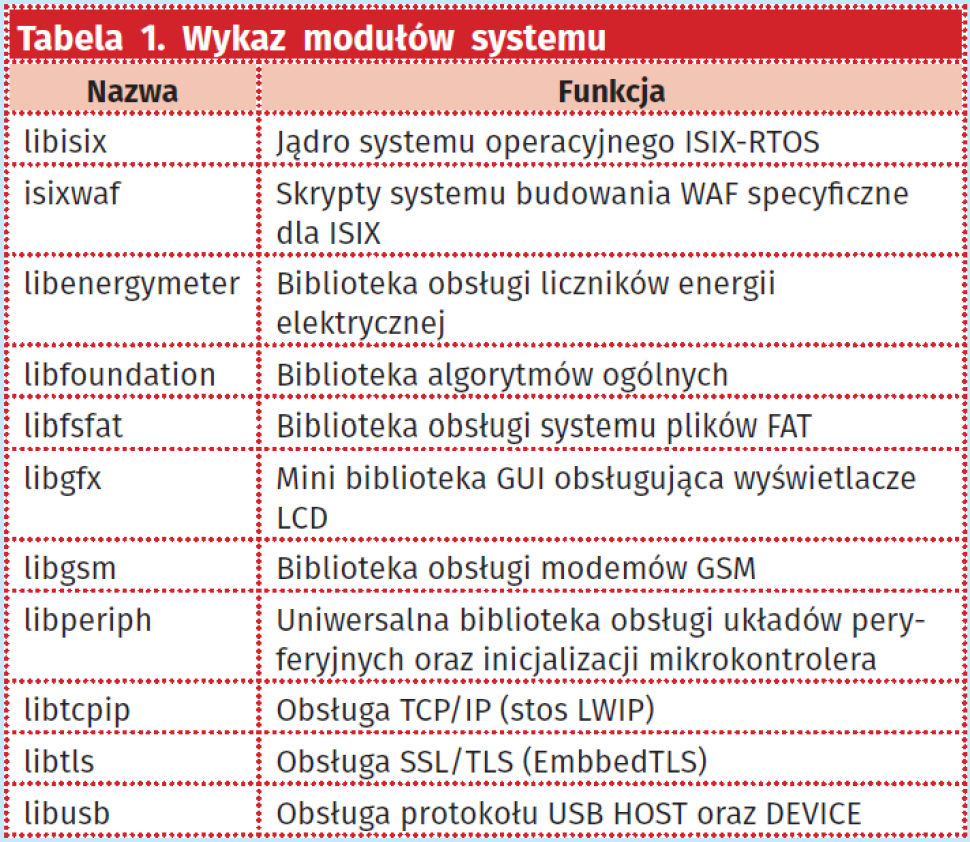
System operacyjny ma budowę modułową, dzięki czemu istnieje możliwość użycia tylko niektórych fragmentów systemu w zależności od potrzeb. Poszczególne moduły zostały podzielone na komponenty, które mogą być używane niezależnie (tabela 1).
Podstawą systemu ISIX jest system budowania obrazu pamięci Flash mikrokontrolera przygotowany w oparciu o narzędzie do budowania projektów o nazwie WAF (https://www.waf.io/). Narzędzie to w porównaniu do GNU-MAKE używanego w poprzednich wersjach systemu, ma szereg zalet:
- Jest przenośne i działa zarówno w systemach Linuksowych jak i pod Windows czy OS-X bez konieczności do uciekania się do różnych „sztuczek” w skryptach.
- Umożliwia budowanie równoległe oraz zawiera standardowe reguły umożliwiający budowanie aplikacji dla mikrokontrolerów.
- Wspiera automatyczny cache dla obiektów bez konieczności budowania całego kodu od początku, oszczędzając czas.
- Dzięki językowi Python umożliwia łatwe tworzenie rozszerzeń, i skryptów, np. skrypty linkera mogą być łatwo generowanie automatycznie w oparciu o meta-dane zawarte w plikach konfiguracyjnych XML, które zawierają informację na temat zasobów danego mikrokontrolera.
- Umożliwia inteligentne znajdowanie plików źródłowych z wykorzystaniem wzorców (glob), które znacząco ułatwiają tworzenie skryptów oraz zarządzanie nimi.
W GNU-MAKE poszczególne skrypty budujące były zawarte w pliku Makefile, natomiast w WAF pliki opisujące proces budowania mają nazwę wscript i składniowo zgodne są z językiem python. Proces budowania aplikacji odbywa w trzech krokach:
- Konfiguracji projektu za pomocą polecania waf configure, gdzie możemy przekazać dodatkowe parametry konfiguracyjne do projektu za pomocą odpowiednich argumentów np. częstotliwość rezonatora kwarcowego, czy wybór dodatkowych funkcjonalności.
- Budowania projektu za pomocą polecenia waf lub waf build.
- Załadowania projektu do płytki docelowej za pomocą polecenia waf program.
Jądro systemu ISIX
Jądro systemu ISIX napisano w języku C z rozszerzeniami GNU w dialekcie C11, a jego kod źródłowy znajduje się w katalogu libisix. Pomimo iż podstawowe API wykorzystuję język C, wszystkie biblioteki posiadają dodatkowe klasy umożliwiające korzystanie z API systemu w języku C++. API systemu ISIX zostało podzielone na następujące na bloki funkcjonalne pokazane na rysunku 1. Możemy tutaj wyszczególnić wywołania systemowe odpowiedzialne za: zarządzanie pamięcią, zarządzanie procesami (zadaniami), komunikację i synchronizację międzyprocesową IPC, obsługę przerwań i sterowanie pamięciami cache procesora, oraz funkcje odpowiedzialne za kontrolę całości systemu.

Zarządzanie pamięcią
Mikrokontrolery z rdzeniem Cortex M nie mają jednostki zarządzania pamięcią. Niektóre układy mają jedynie uproszczony układ ochrony pamięci MPU, zatem system operacyjny oraz jądro systemu współdzielą wspólną przestrzeń adresową. Z jednej strony jest to zaletą, ponieważ upraszcza komunikację międzyprocesową, z drugiej strony jest wadą, ponieważ błędnie działający proces może uszkodzić jądro systemu i inne procesy. System operacyjny ISIX wykorzystuje funkcjonalność jednostki MPU i jeśli taka jest dostępna, chroni jądro systemu, procesy przed nadpisaniem obszaru stosu danych oraz dostępem do niedozwolonych fragmentów kodu. API zarządzania pamięcią z uwagi na współdzielenie przestrzeni adresowej służy do przydziału pamięci znajdującej się na stercie i może być użyte przez sterowniki oraz procesy użytkownika. Wywołania systemowe związane z obsługą pamięci przedstawia tabela 2.
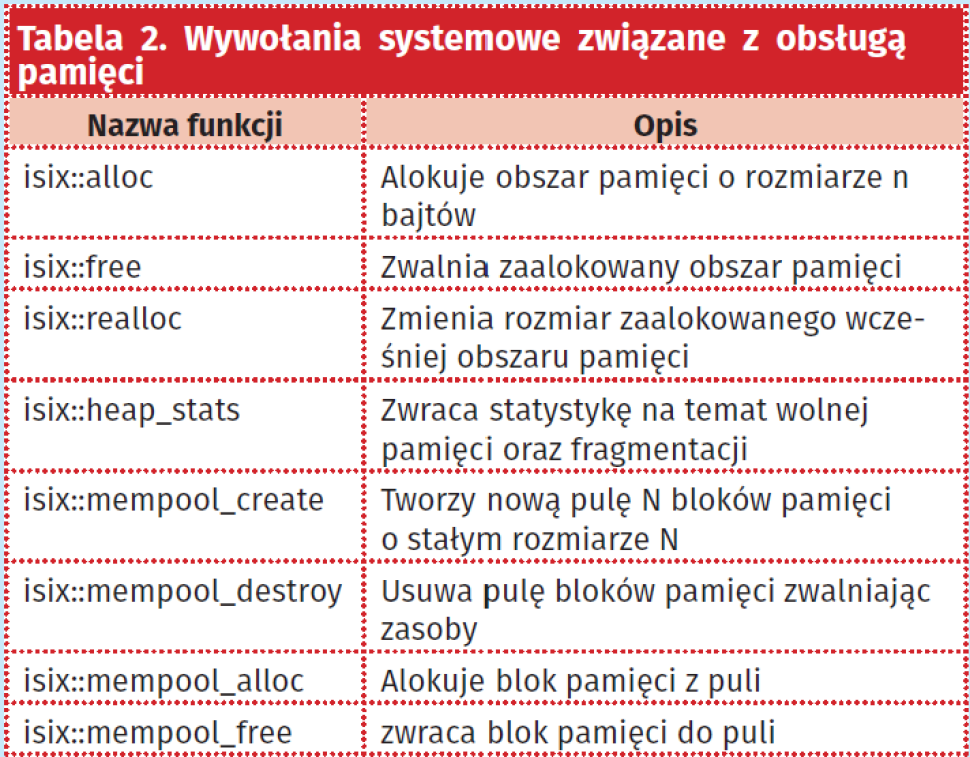
Funkcje alloc/free/realloc służą do przydziału oraz zwolnienia pamięci na stercie. Działanie tych funkcji jest niedeterministyczne, więc nie powinny one być używane w procedurach obsługi przerwań. Zarządzanie obszarem sterty w systemie ISIX odbywa się za pomocą nowatorskiego algorytmu TSLF (Two Levels Segregated Fit Memory). Jest to algorytm przeznaczony dla systemów operacyjnych czasu rzeczywistego, który w porównaniu do typowego algorytmu listy wolnych bloków, zapewnia znacznie bardziej deterministyczny czas odpowiedzi oraz znacząco zmniejsza problem fragmentacji, co jest szczególnie istotnie z powodu ograniczonych zasobów i braku jednostki MMU. Wymienione funkcje alokacji pamięci są używane przez standardową bibliotekę języka C, tak więc do alokacji pamięci w celu zapewnienia kompatybilności raczej powinno używać się standardowych funkcji malloc/free oraz new/delete. Odrębną pulę stanowią wywołanie rodziny mempool_ których zadaniem jest alokowanie oraz zwalnianie stałych bloków pamięci. Alokacja stałych bloków pamięci jest szczególnie przydatna w wypadku sterowników urządzeń, które przekazują dane pakietami o stałej wielkości, na przykład, ramki ethernet lub ramki USB. Funkcje mempool_alloc, oraz mempool_free mogą być używane w procedurach obsługi przerwań, ponieważ wykazują one złożoność obliczeniową klasy O(1).
Zarządzanie procesami
Zarządzanie procesami w systemie ISIX realizowane jest przez nieskomplikowany zestaw funkcji, który przedstawia się w sposób pokazany w tabeli 3.
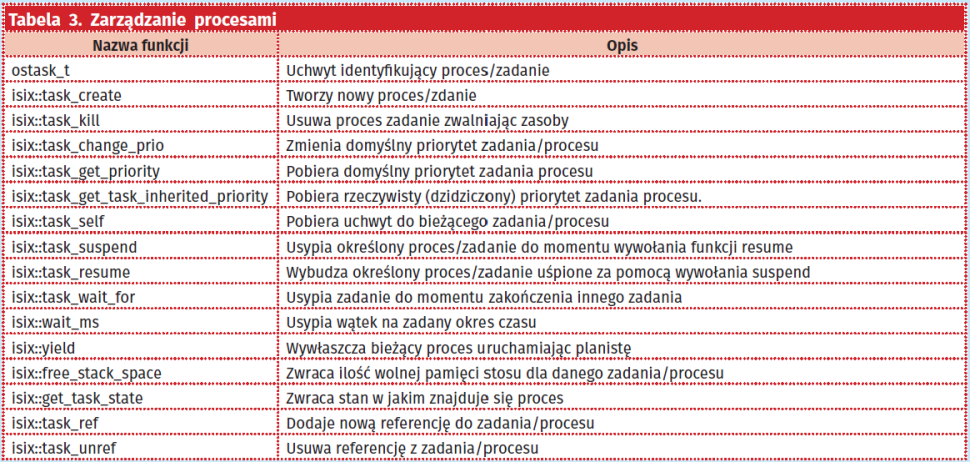
Funkcje odpowiedzialne za zarządzenie procesami podzielono na kilka mniejszych podgrup.
Pierwszą grupę stanowią wywołania odpowiedzialne za tworzenie i usuwanie zadań. Podczas tworzenia procesu musimy jako argumenty podać wskaźnik do funkcji realizującej dany wątek, argument przekazany do wątku podczas jego uruchomienia, wielkość stosu przydzielonego dla wątku oraz priorytet wątku. Ponieważ procesor nie posiada jednostki zarządzania pamięcią rozmiar stosu musi być znany już na etapie utworzenia zadania, ponieważ wszystkie procesy pracują, we wspólnej przestrzeni adresowej i nie ma możliwości mapowania dodatkowej pamięci do przestrzeni wątku, na żądanie jak ma to miejsce w systemach z MMU.
Kolejna grupa wywołań umożliwia zarządzanie priorytetami wątków. Jeśli jesteśmy przy zarządzaniu priorytetami należy wspomnieć, że domyślnie system ISIX dysponuje 16 priorytetami wątków od 0 do 15, gdzie 0 to jest wartość liczbowa dla najwyższego priorytetu, natomiast 15 to wartość liczbowa symbolizująca najniższy priorytet. Liczba dostępnych priorytetów wątków może zostać zmieniona w systemie na etapie kompilacji poprzez zmianę definicji CONFIG_ISIX_NUMBER_OF_PRIORITIES. System ISIX posiada mechanizm dziedziczenia priorytetów, który zapobiega problemowi inwersji priorytetów. Dodatkowa funkcja get_task_inherited_priority() pozwala dowiedzieć się z jakim rzeczywistym priorytetem dany proces został zaszeregowany, natomiast get_task_priority() umożliwia pobranie domyślnie przydzielonego priorytetu dla procesu/zadania.
Oddzielną grupę stanowią funkcje zarządzania procesami, które umożliwiają usypianie procesów wznawianie wykonania zadań, oraz usypianie procesów do czasu gdy inny proces ulegnie zakończeniu.
Grupa wywołań diagnostycznych umożliwia sprawdzenie jaka ilość miejsca została na stosie, czy sprawdzenie stanu w jakim proces aktualnie znajduje się. W systemie ISIX każde zadanie może znaleźć się w jednym z następujących stanów:
- READY – proces gotowy do wykonania i oczekujący na zaszeregowanie.
- RUNNING – proces aktualnie wykonywany.
- CREATED – proces został utworzony, ale jeszcze nie jest wykonywany.
- SLEEPING – proces jest uśpiony i oczekuje na wybudzenie.
- WTSEM – proces czeka na semafor.
- ZOMBIE – proces zombie, oczekujący na zniszczenie i zwolnienie zasobów.
- WTEVT – proces oczekujący na zdarzenie.
- SUSPEND – proces uśpiony za pomocą task_suspend.
- WTMTX – proces oczekujący na mutex.
- WTCOND – proces oczekujący na zmienną warunkową.
- WTEXIT – proces oczekuje na zakończenie innego procesu.
Stan, w którym aktualnie znajduje się wątek jest wykorzystywany przez algorytm szeregujący, celem zakwalifikowania zadań do wykonania, oraz może być również użyty w celach diagnostycznych na etapie uruchamiania oprogramowania uruchamiania oprogramowania.
Przy okazji warto tutaj wspomnieć o interfejsie C++ służącym do tworzenia nowych procesów zadań, które, umożliwia utworzenie kodu zadania zarówno z prostej funkcji, funkcji lambda, jak i dowolnej metody będącej składową klasy. Na przykład, utworzenie nowego wątku (zadania), z wykorzystaniem tego mechanizmu bezpośrednio w konstruktorze klasy może wyglądać jak na listingu 1. W konstruktorze klasy jest tworzony wątek, który będzie stanowić metoda klasy task_tests o nazwie thread.
base_task_tests()
: m_thr( isix::thread_create(std::bind(&base_task_tests::thread,std::ref(*this))))
{
}
Komunikacja międzyprocesowa
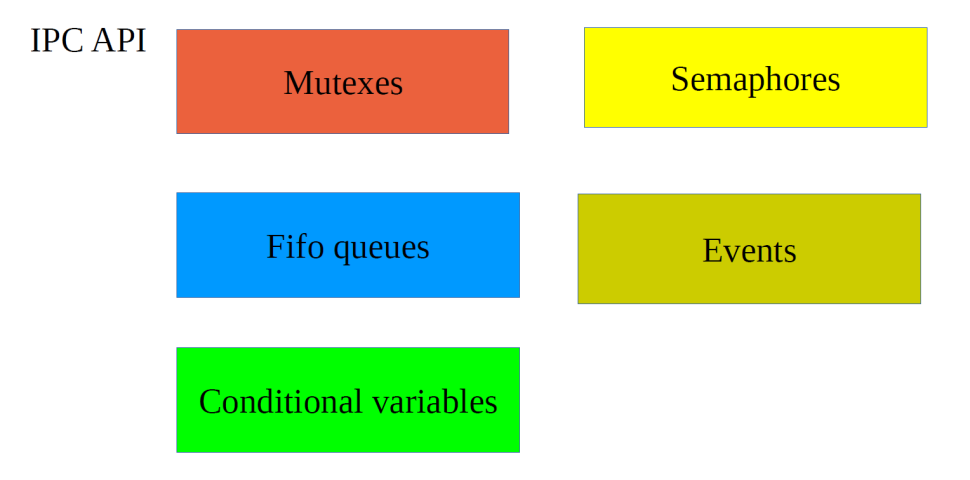
Istotnym interfejsem systemowym jest blok wywołań systemowych IPC (Inter-Process Communication), który jest odpowiedzialny za synchronizację oraz wymianę danych między procesowami, a także synchronizację i wymianę danych pomiędzy procesami, a procedurami obsługi przerwań. W systemie ISIX do dyspozycji mamy kilka popularnych mechanizmów synchronizujących (rysunek 2).
Semafory
Semafory są podstawowym mechanizmem umożliwiającym synchronizację dostępu do zasobów tam gdzie zasób dzielony jest na ograniczoną liczbę użytkowników. Na przykład za pomocą semaforów aplikacja może kontrolować maksymalną liczbę otwartych plików. Typowy semafor zaimplementowany jest jako liczba typu całkowitego, która może przyjmować wartości od 0 do ustalonej wartości maksymalnej. W szczególności może być semaforem typu binarnego przyjmującym wartości jedynie z zakresu 0 oraz 1. Semafor skojarzony z danym zasobem początkowo ustawiany jest na wartość dostępnych zasobów danego typu. Proces który chce odwołać się do danego zasobu musi najpierw sprawdzić wartość związanego z tym zasobem semafora. Dodatnia wartość oznacza, że zasób jest dostępny. Przed rozpoczęciem korzystania z danego zasobu proces zmniejsza wartość semafora, a zerowa wartość oznacza, że nie ma wolnych zasobów i proces musi czekać na zwolnienie zasobu przez inny proces aktualnie zajmujący zasób. Kiedy zasób zostanie zwolniony wartość semafora jest zwiększana, a system powiadamia oczekujący proces.
W systemie ISIX możemy tworzyć zarówno semafory zliczające o określonej maksymalnej wartości jak i semafory binarne ustawiając górny limit dla semafora na wartość 1. API systemowe związane z semaforami w systemie ISIX wygląda jak w tabeli 4.
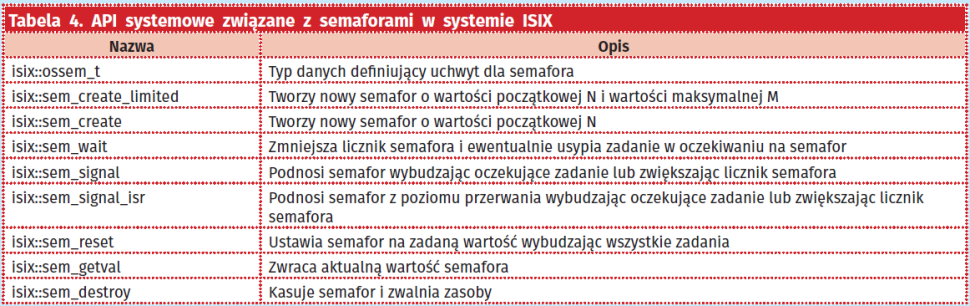
Do dyspozycji mamy pełny zestaw funkcji umożliwiający pracę z semaforami. Semafory mogą być wykorzystywane z poziomu procedur obsługi przerwań ISR do notyfikacji procesów/zadań oczekujących na jakieś zdarzenia od układów peryferyjnych. Pozwala to na przekierowanie bardziej czasochłonnych zadań z procedur obsługi przerwań do procesów/zadań znacząco zwiększając responsywność systemu operacyjnego. Do notyfikacji z procedur obsługi przerwań należy używać specjalnych funkcji z sufiksem _isr.
Semafory Mutex
Termin mutex pochodzi od angielskiego terminu mutually exclusive i jest specjalnym rodzajem semafora binarnego, wyposażonym w mechanizm zapobiegający inwersji priorytetów. Dodatkowo, jedynie proces, który założył blokadę może go odblokować, a próba odblokowania przez inny proces kończy się błędem. Idealnym zastosowaniem dla mutexów jest ochrona dostępu do danego zasobu, na przykład, gdy jakaś operacja realizowana przez jeden proces/zadanie nie może być w jednym czasie przerwana przez inny proces. Inwersja priorytetów jest niekorzystnym zjawiskiem, które powoduje że w danej chwili wykonuje się inne zadanie niż to które powinno się wykonywać zgodnie z regułami algorytmu szeregowania. Jako środek zaradczy stosuje się dziedziczenie priorytetów, które polega na tymczasowym podniesieniu priorytetów oczekujących zadań do najwyższego priorytetu ze wszystkich priorytetów oczekujących na te zasoby. W systemie ISIX mamy oddzielne API związane z obsługą muteksów (tabela 5).

Do dyspozycji mamy pełny zestaw funkcji potrzebny do pracy z mutexami. Dodatkowo, jest wywołanie mutex_unlock_all, które zwalnia mutex, ale oprócz tego wybudza nie tylko jeden, a wszystkie procesy, które oczekują na zasób.
Jak możemy zauważyć w opisie brakuje funkcji z sufiksem _isr, ponieważ funkcje związane z semaforami nie powinny być wywoływane z procedur obsługi przerwań. W kontekście przerwań możemy korzystać jedynie z semaforów. Dzieje się tak ponieważ algorytm przeliczania i dziedziczenia priorytetów jest złożony obliczeniowo i nie jest odpowiedni do tego, aby wywoływać go z kontekstu przerwania.
Kolejki FIFO
Kolejki FIFO są wygodnym mechanizmem służącym do komunikacji międzyprocesowej, i mogą być używane do przekazywania danych pomiędzy procesami/zadaniami, jak i pomiędzy procedurami przerwań, a procesami. Kolejka komunikatów w systemie ISIX służy do przekazywania komunikatów o stałej wielkości, a podczas jej tworzenia należy określić maksymalny dopuszczalny rozmiar kolejki. Zasadę działania kolejki przedstawiono na rysunku 3. Ilustruje on kolejkę o maksymalnym rozmiarze 7 elementów, która zawiera 5 elementów. Wątek #1 zapisuje poszczególne elementy do kolejki za pomocą wywołania systemowego fifo_write(), natomiast wątek #2 odczytuje dane z kolejki za pomocą wywołania fifo_read(). Każde wywołanie funkcji odczytującej powoduje zwrócenie danej do odczytania lub uśpienie procesu do momentu aż wątek #1 prześle nowe dane do odczytania. Wątek #1 zapisujący dane może przejść w stan oczekiwania, jeśli w kolejce nie ma już wolnego miejsca, do czasu aż wątek #2 odczyta dane i zwolni miejsce w kolejce. Obsługa kolejek FIFO realizowana jest przez następujące API systemowe (tabela 6).

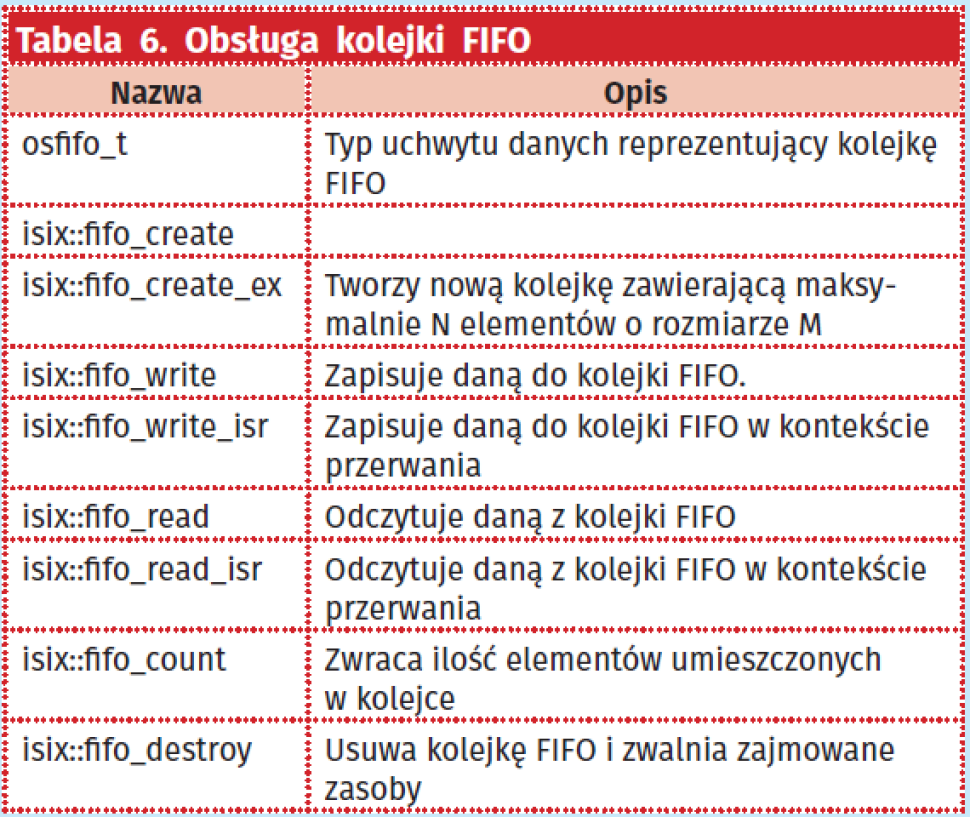
Funkcje z sufiksem _isr, są funkcjami nieblokującymi i mogą być wywoływane w kontekście przerwania. Jeśli nie ma wolnego miejsca lub danych do odczytania, to zamiast uśpienia w oczekiwaniu na daną lub wolne miejsce jest zwracany kod błędu informujący o wystąpieniu takiej sytuacji. Kolejki FIFO są obiektami jednokierunkowymi, więc jeśli chcemy zrealizować komunikację dwukierunkową musimy użyć oddzielnych kolejek. Warto również wspomnieć, o tym że wszystkie zadania pracują we wspólnej przestrzeni adresowej, a zatem możemy za pomocą kolejek przekazywać wskaźniki do innych obszarów pamięci.
Zdarzenia bitowe (Events)
Zdarzenia bitowe są mechanizmem czę?ciej spotykanym w?systemach operacyjnych wbudowanych, ni? w?typowych systemach og?lnego przeznaczenia. Zdarzenia umo?liwiaj? oczekiwanie na?okre?lone zdarzenie lub grup? zdarze? polegaj?ce na?ustawieniu odpowiedniego bitu lub grupy bit?w w?jednym s?owie. W?systemie ISIX zdarzenie przechowuje mask? bitow? w?zmiennej o?d?ugo?ci 31?bit?w, tak wi?c w?tym czasie jeden proces/zadanie mo?e czeka? na?31?zdarze? jednocze?nie. Zasad? dzia?ania tego mechanizmu przedstawiono na?ściej spotykanym w systemach operacyjnych wbudowanych, niż w typowych systemach ogólnego przeznaczenia. Zdarzenia umożliwiają oczekiwanie na określone zdarzenie lub grupę zdarzeń polegające na ustawieniu odpowiedniego bitu lub grupy bitów w jednym słowie. W systemie ISIX zdarzenie przechowuje maskę bitową w zmiennej o długości 31 bitów, tak więc w tym czasie jeden proces/zadanie może czekać na 31 zdarzeń jednocześnie. Zasadę działania tego mechanizmu przedstawiono na rysunku 4.
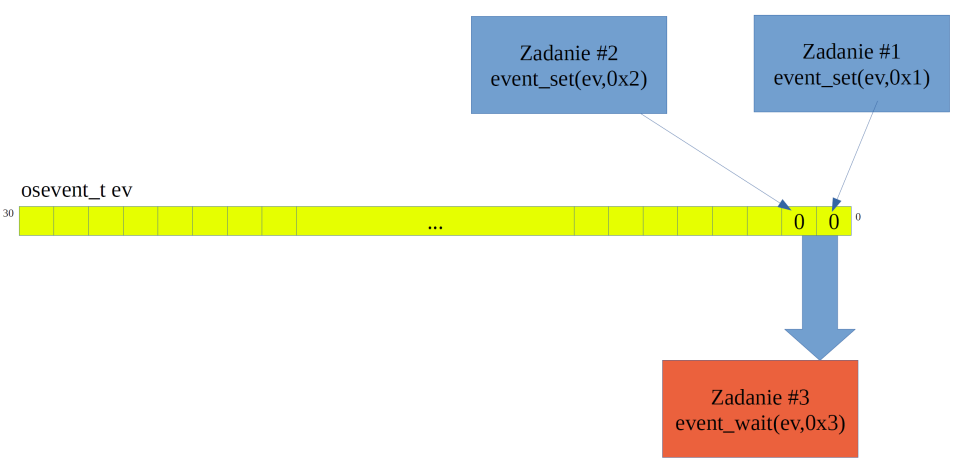
Zadanie #3 wywołuje funkcję event_wait(), z argumentem 0x3, co powoduje, że to zdanie zostanie uśpione do momentu ustawienia bitów o numerze porządkowym 0 oraz 1. Oba bity są wyzerowane, więc zadanie #3 jest usypiane. Zadanie #1 w wyniku zrealizowania jakiejś czynności ustawia bit o numerze porządkowym 0 za pomocą wywołania event_set() informując, iż jakaś czynność została wykonana. Podobnie po wykonaniu żądanej czynności, zadanie #2 ustawia bit o numerze porządkowym 1 informując o zakończeniu wykonywania określonej czynności. W tym momencie, zdarzenie bitowe przyjmuje wartość 0x03, co spełnia kryterium wznowienia wykonywania zadania #3, zatem po spełnieniu tych warunków system operacyjny wznowi wykonanie zadania zadanie #3 kończąc wywołanie systemowe event_wait(). Należy tutaj wspomnieć, że funkcja event_wait(), może oczekiwać zarówno na ustawienie wszystkich wymaganych bitów, jak i tylko jednego bitu z zadanej grupy w zależności od parametru wait_for_all typu bool.
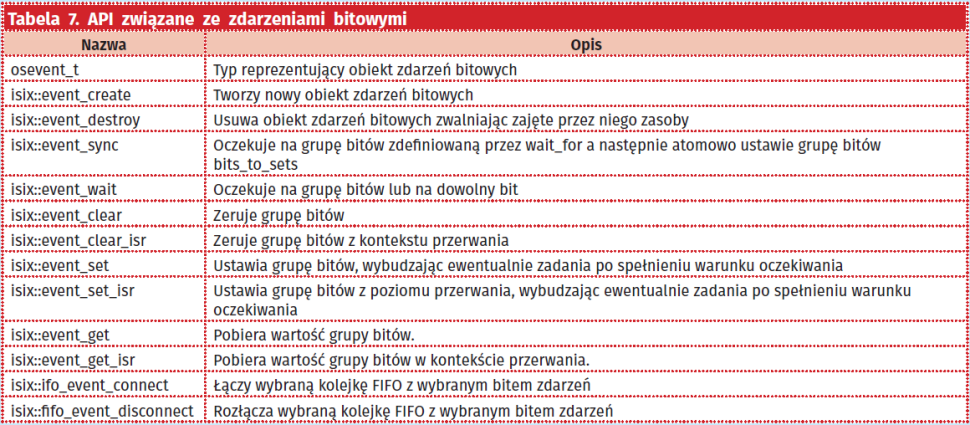
System ISIX posiada również dodatkowe API które umożliwia skojarzenie danego bitu w danym evencie z dowolną kolejką FIFO, co może być wykorzystane np. do oczekiwania na zdarzenie odczytu danych z kilku kolejek przez jeden proces. Korzystając powyższego mechanizmu możemy łatwo osiągnąć podobną funkcjonalność jak w przypadku korzystania z wywołań systemowych poll/epoll w systemach zgodnych ze standardem POSIX.
API związane ze zdarzeniami bitowymi w systemie ISIX przedstawia się jak w tabeli 7. Podobnie jak w poprzedniej grupie wywołań funkcje z sufiksem isr mogą być używane w procedurach obsługi przerwań, natomiast pozostałe nie mogą być używane w kontekście przerwania. Warto tutaj wspomnieć o wywołaniu event_sync, które w sposób atomowy oczekuje na grupę bitów bits_to_wait a następnie ustawia grupę bitów na wartość bits_to_set, co może być przydatne w bardziej zaawansowanych problemach synchronizacyjnych.
Zarządzanie przerwaniami oraz pamięcią cache
Istotnym aspektem z punktu sterowników urządzeń jest zarządzanie przerwaniami, oraz pamięciami cache procesora. W pierwotnej wersji systemu ISIX nie było, żadnych wywołań dedykowanych do tego celu, tak więc zarządzenie kontrolerem przerwań było realizowane przez biblioteki zewnętrzne dedykowane dla danego mikrokontrolera. Wraz wprowadzeniem pamięci cache dla procesorów CORTEX-M7 do systemu ISIX wprowadzono wewnętrzne API obsługujące kontroler przerwań, oraz zarządzanie pamięciami cache przydatne, podczas pisania ujednoliconych sterowników urządzeń.
Kontroler przerwań
Wywołania systemowe dedykowane obsłudze kontrolera przerwań możemy podzielić na dwie grupy. Jedną grupę stanowią funkcje generyczne, natomiast drugą grupę stanowią funkcje specyficzne dla danego kontrolera. W wypadku rdzenia Cortex-M będą to funkcje specyficzne dla kontrolera przerwań NVIC (Nested Vectorized Interrupt Controller).
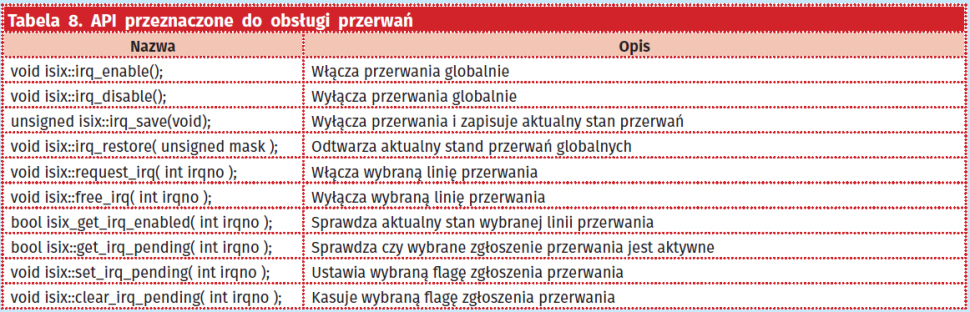
API przeznaczone do ogólnej obsługi przerwań umożliwia odblokowanie oraz zablokowanie wybranego kanału przerwań, czy globalne włączenie albo wyłącznie wszystkich przerwań (tabela 8). Pierwszą grupę stanowią wywołania odpowiedzialne za globalne włączenie albo wyłączenie systemu przerwań, mamy też możliwość atomowego zapisania poprzedniego stanu przerwań globalnych, w zmiennej lokalnej wraz z jego wyłączeniem. Istnieje również możliwość odtworzenia poprzedniego zapisanego stanu przerwań globalnych. Drugą grupę stanowią funkcje, umożliwiające włączenie lub wyłączenie wybranej linii przerwania, sprawdzenie stanu zgłoszenia przerwania, czy ustawienie lub wyzerowanie wybranej linii zgłoszenia przerwania. Jako argument do wszystkich funkcji należy podać numer porządkowy wybranej linii, który jest specyficzny dla platformy. API obsługi przerwań specyficzne dla platformy umożliwia ustawienie różnych funkcji systemu przerwań które są specyficzne dla danej architektury. W przypadku mikrokontrolerów z rdzeniem Cortex-M3/4/7 zestaw funkcji specyficznych dla kontrolera NVIC zaprezentowano w tabeli 9.
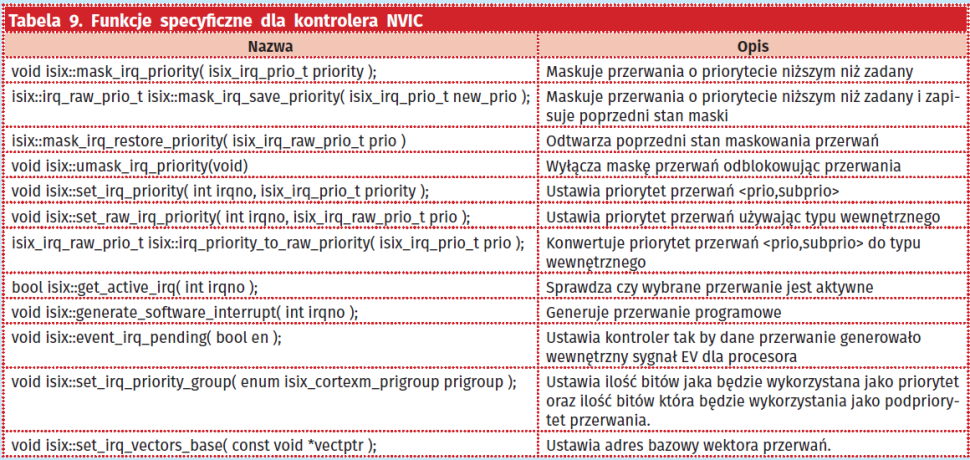
Dodatkową funkcjonalność stanowią funkcje umożliwiające wyłączenie (maskowanie) przerwań ale tylko do wartości priorytetu przekazanego jako argument. Podobnie jak w funkcjach podstawowych możemy maskować przerwania z zachowaniem poprzedniego stanu maski lub bez. Mamy również możliwość ustawienia priorytetów poszczególnych przerwań za pomocą funkcji set_irq_priority(), co umożliwia wykonywanie czasowo krytycznych przerwań poza kolejnością. Mamy również możliwość ustawiania flag zgłoszeń poszczególnych przerwań czy możliwość ustalenia ile bitów z wartości liczbowej priorytetu będzie wykorzystanie jako priorytet, a ile jako podpriorytet przerwań. Więcej szczegółów możemy znaleźć w dokumentacji technicznej rdzenia Cortex-M.
Zarządzanie pamięciami CACHE procesora
Najbardziej zaawansowane technicznie mikrokontrolery, pracujące z częstotliwością taktowania rdzenia rzędu kilkuset MHz, mogą być wyposażone w dodatkową pamięć cache, która znacząco przyśpiesza dostęp do danych znajdujących się w wolniejszej pamięci Flash czy RAM. Ten mechanizm jest znany głównie z większych mikroprocesorów, a w świecie procesorów ARM Cortex-M został w Cortex-M7, który zamiast do magistrali AHB jest dołączony do magistrali AXI znanej z procesorów aplikacyjnych Cortex-A. Schemat blokowy pamięci Cache procesora pokazano na rysunku 5.

Rdzeń Cortex-M7 ma po 4 kB pamięci cache pierwszego poziomu (L1), osobno dla kodu oraz osobno dla danych. Pamięć cache jest zazwyczaj przeźroczysta dla oprogramowania, jednak przy tworzenia sterowników urządzeń korzystających z DMA jest konieczna odpowiednia synchronizacja pamięci cache z pamięcią główną. Podobny sytuacja zachodzi dla pracy wieloprocesorowej, jednak w świecie mikrokontrolerów najczęściej takich konfiguracji się nie spotyka.
System ISIX wprowadził API przeznaczone dla obsługi pamięci cache wraz z pojawieniem się rdzenia Cortex-M7. Jeśli używamy mikrokontrolera z rdzeniem Cortex-M0/M3/M4 niemającego pamięci cache, wówczas funkcję związane z obsługą cache są puste i nie wykonują żadnych czynności. Niezależnie jednak od tego czy korzystamy z rdzenia posiadającego pamięć cache, czy nie, w sterownikach urządzeń korzystających z kontrolera DMA zawsze należy ich używać, aby uzyskać kod który działa na dowolnym rdzeniu. API służące do obsługi pamięci cache przedstawiono w tabeli 10.

API zawiera podstawowe wywołania umożliwiające włączenie lub wyłączenie pamięci I-Cache (pamięć cache kodu) oraz D-Cache (pamięć cache danych), oraz funkcje unieważniające lub czyszczące pamięć I-Cache oraz D-Cache. W przypadku pamięci D-Cache mamy możliwość unieważnienia lub wyczyszczenia linii pamięci cache, które wskazują na określony przedział adresów fizycznych wyznaczonych przez adres początkowy oraz rozmiar obszaru, bez konieczności usuwania całości. Warto tutaj wspomnieć czym różni się operacja unieważnienia od operacji czyszczenia pamięci cache. Operacja unieważnienia unieważnia dane jakie znajdują się w pamięci cache i traktuje tak jakby tych danych tam nie było, natomiast operacja czyszczenia przepisuje zawartość pamięci cache do pamięci głównej. Operację unieważnienia stosujemy np. po zakończeniu transmisji DMA, gdy obszar pamięci zmienił się poza kontrolą procesora, natomiast operację czyszczenia należy zastosować np. przed transmisją DMA, aby dane odczytane przez kontroler DMA z pamięci były prawidłowe.
Lucjan Bryndza, EP
lucjan.bryndza@boff.pl












