 Zaloguj
Zaloguj




Otaczający nas świat jest niezmiennie analogowy, przynajmniej jeśli spojrzeć nań w skali makroskopowej. Zanim jakikolwiek sygnał wejściowy trafi do przetwornika ADC, musi zostać najpierw odpowiednio uformowany: wzmocniony, przefiltrowany, czasem przełączony z kilku dostępnych źródeł. Każdy z tych etapów zużywa energię, czy to dynamicznie (w czasie przełączania), czy też statycznie. Dobra wiadomość jest taka, że współczesny rynek oferuje bardzo szeroką gamę ultraniskomocowych stabilizatorów LDO, wyjątkowo energooszczędnych, a zarazem zaskakująco wydajnych przetwornic DC/DC, a także wzmacniaczy operacyjnych, źródeł napięcia odniesienia czy przełączników analogowych, które pozwalają zbudować naprawdę „kulturalny” (z energetycznego punktu widzenia) tor sygnałowy – i to bez rezygnacji z przyzwoitych parametrów metrologicznych.
W artykule zebraliśmy przegląd wybranych kategorii takich układów. Omawiamy przykładowe komponenty od czołowych producentów oraz typowe zastosowania – od zasilania toru analogowego z baterii guzikowej aż po energooszczędne kondycjonowanie sygnału z termopary czy mostka tensometrycznego. Na końcu znalazło się też miejsce na praktyczne wskazówki projektowe, które pomogą zainteresowanym Czytelnikom uniknąć klasycznych pułapek czyhających na nas, konstruktorów, w systemach ultra-low-power.
Stabilizatory LDO o niskim prądzie spoczynkowym
Klasyczne stabilizatory o niskim spadku napięcia (LDO – Low Drop-Out) cenimy przede wszystkim za możliwość pracy przy niewielkiej różnicy pomiędzy napięciami wejściowym a wyjściowym, a także (przynajmniej w większości konstrukcji) za relatywnie niski poziom szumu i prostotę aplikacji wynikającą z niewielkiej liczby obligatoryjnych elementów zewnętrznych. W urządzeniach bateryjnych kluczowy parametr to jednak prąd spoczynkowy, oznaczany zwykle literami IQ – czyli prąd pobierany przez sam stabilizator przy małym obciążeniu lub wręcz w warunkach jego braku. To właśnie ten parametr w dużej mierze decyduje o tym, jak bardzo nasz zasilacz „podjada” energię z baterii lub akumulatora, gdy... reszta systemu smacznie śpi.
Jeszcze niedawno mikromocowe LDO pobierały „dla siebie” kilkadziesiąt mikroamperów. Dzisiaj dostępne są fantastyczne konstrukcje liniowych regulatorów napięcia o IQ liczonym w dziesiątkach nanoamperów. Przykład? Stabilizator TPS7A02 (fotografia 1) marki Texas Instruments ma ów parametr na poziomie (typowo) około 25 nA, a zarazem jest w stanie dostarczyć nawet do 200 mA prądu wyjściowego – i to bez dramatycznego pogorszenia pozostałych właściwości. Nieco słabiej, choć wciąż całkiem nieźle radzi sobie w tej kwestii układ STLQ020 produkcji ST Microelectronics – łączy on bowiem zalety dość niskiego IQ (rzędu 300 nA) z dopuszczalnym prądem wyjściowym dochodzącym do 200 mA.

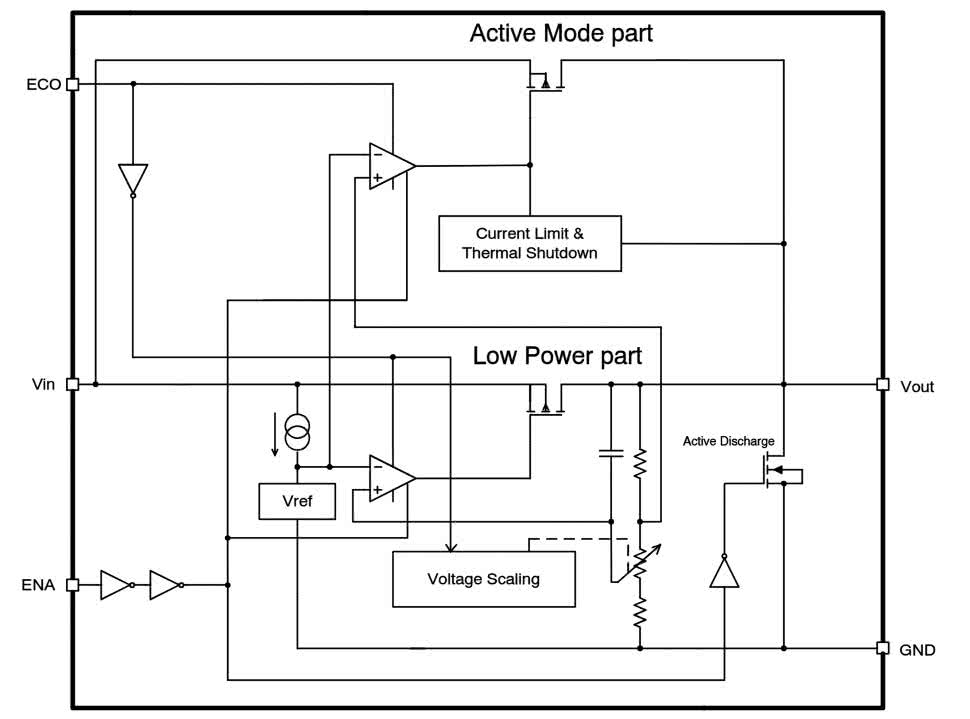
Bardzo ciekawą, choć dość unikalną grupę układów stanowią stabilizatory LDO z dwoma trybami pracy. Przykładowo NCP171 marki onsemi (rysunek 1) może pracować w trybie super-oszczędnym (IQ dochodzący typowo do 50 nA przy napięciu wejściowym nieprzekraczającym 5 V) albo w trybie „wydajnościowym”, w którym rośnie wprawdzie pobór prądu zasilania samego stabilizatora, ale wydatnie poprawiają się parametry dynamiczne, rośnie też wydajność prądowa (80 mA w trybie Active Mode vs. 5 mA w trybie Low-Power Mode).
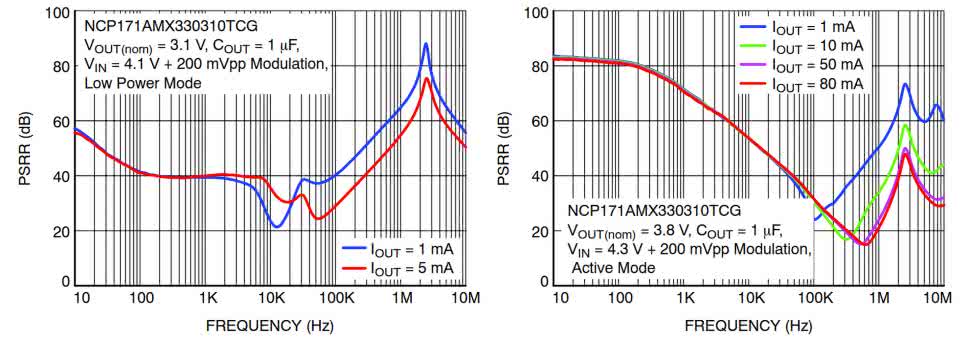
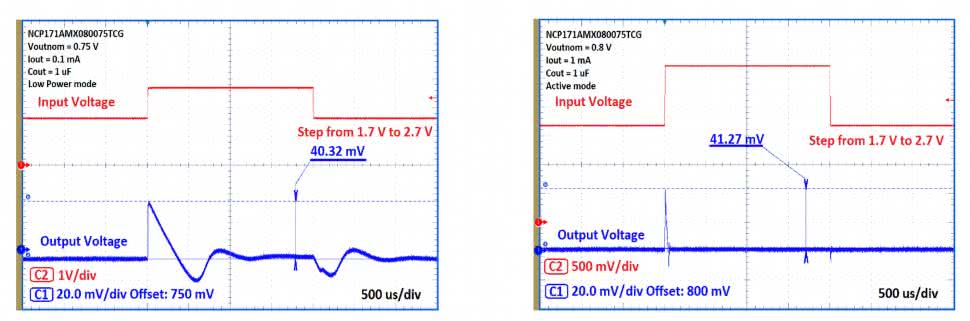
Warto uważnie prześledzić notę katalogową stabilizatorów z serii NCP171 – jak na dłoni widać tu bowiem szereg ograniczeń, z jakimi muszą mierzyć się projektanci układów scalonych balansujący pomiędzy energooszczędnością, a wydajnością tworzonych rozwiązań. Przytoczymy tutaj dwa przykłady – na rysunkach 2 i 3 pokazano odpowiednio charakterystyki PSRR w funkcji częstotliwości oraz odpowiedź impulsową na skokową zmianę napięcia wejściowego stabilizatora. Już na pierwszy rzut oka widać wyższość trybu aktywnego pod względem zarówno „kultury” pracy dynamicznej, jak i parametrów częstotliwościowych. Tym bardziej więc trzeba doceniać te układy, które oferują relatywnie niski pobór prądu i dobre parametry użytkowe – uzyskanie stabilizatora szybko reagującego na zmiany obciążenia i/lub zasilania, dobrze tłumiącego wysokoczęstotliwościowe składowe tętnień, a zarazem racjonalnie gospodarującego energią z zasilacza nie jest wbrew pozorom zadaniem łatwym.
Stabilizatory z dwoma trybami pracy stanowią wygodne rozwiązanie do układów, w których przez zdecydowaną większość czasu system śpi, ale co jakiś czas potrzebne jest obsłużenie skokowego wzrostu prądu (zwykle spowodowanego np. transmisją radiową czy też po prostu wybudzeniem mikrokontrolera i dokonywaniem obliczeń, zapisem danych do pamięci, etc.). Przeważnie pogorszone parametry w zakresie PSRR czy odpowiedzi impulsowej/skokowej, w trybie najoszczędniejszym z oszczędnych, nie będą szczególnie dotkliwe dla działania urządzenia – skoro procesor i inne układy i tak „śpią”, to raczej nic ciekawego nie powinno też dziać się na liniach zasilania. Gwoli ścisłości trzeba jednak dodać, że o wspomnianych ograniczeniach warto pamiętać – chociażby dlatego, że dokładność stabilizacji napięcia może być wyraźnie gorsza w trybie oszczędnym, co może teoretycznie mieć znaczenie np. w wyniku zbliżenia się napięcia wyjściowego do progu zadziałania układu BOR mikrokontrolera. Oczywiście z problemem tego rodzaju zetkniemy się tylko, jeżeli napięcie spadnie zbyt mocno w czasie wybudzania urządzenia, a my nie założymy odpowiedniego marginesu bezpieczeństwa.
Przetwornice buck i boost z trybem PFM
W praktyce można spotkać się z sytuacjami, w których samo LDO nie wystarczy. Zasadniczo można wskazać dwie kategorie takich przypadków:
- różnica między napięciem źródła a napięciem zasilającym układ jest duża. Jako przykład weźmy układ elektroniczny z 1,8-woltowym procesorem, który zasilany jest za pomocą jednego ogniwa litowo-polimerowego bądź litowo-jonowego o napięciu znamionowym 3,7 V (4,2 V w stanie pełnego naładowania);
- napięcie źródła trzeba podnieść, by umożliwić prawidłową pracę całego układu. Taka sytuacja może mieć miejsce chociażby w przypadku prostych urządzeń peryferyjnych – mysz komputerowa wyposażona tylko w jedną baterię typu (L)R6 o napięciu nominalnym 1,5 V nie będzie w stanie się uruchomić, jeżeli napięcia nie podniesiemy chociażby do 2 V (po to, by umożliwić nie tylko start procesora i czujnika optycznego, ale także zaświecenie czerwonej lub, co gorsza, białej diody LED).
W pierwszej z wymienionych sytuacji LDO zaczyna marnować sporo energii, a straty rosną proporcjonalnie do różnicy napięć (Uwe-Uwy) oraz prądu pobieranego przez obciążenie. Zasadne wydaje się więc zastosowanie przetwornicy impulsowej typu buck (obniżającej napięcie), której sprawność nawet na poziomie „marnych” 80% będzie i tak doskonałym wynikiem w porównaniu do np. 50-procentowych strat energii w przypadku użycia samego tylko LDO.
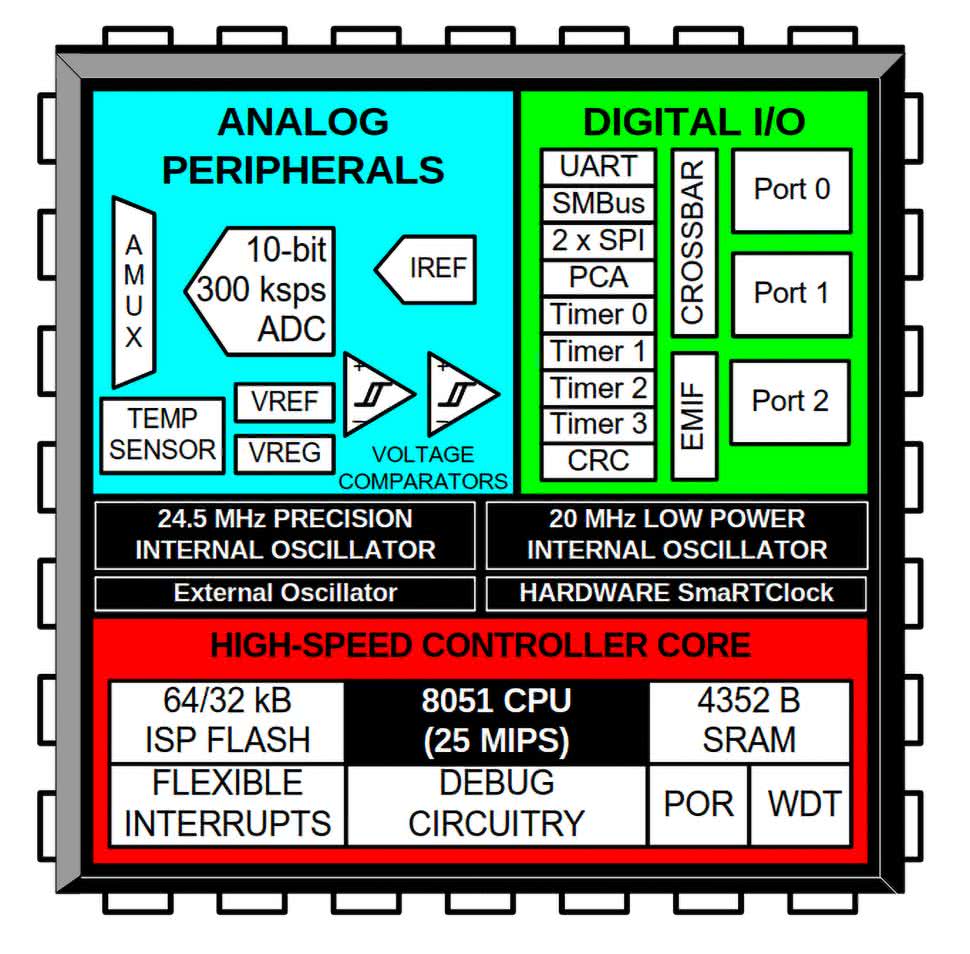
Przetwornica typu boost (step-up) okaże się natomiast absolutnie niezbędna w drugiej z opisanych sytuacji – nie jest bowiem łatwo znaleźć jakikolwiek mikrokontroler, który poradzi sobie z napięciem niższym niż 1,5 V. Wprawdzie na rynku była swego czasu promowana rodzina 8-bitowych procesorów C8051F9xx marki Silicon Labs o architekturze 8051 (rysunek 4), które były w stanie ruszyć już od napięcia 0,9 V, ale i tak było to możliwe za sprawą... wbudowanego w strukturę mikrokontrolera sterownika przetwornicy boost (sic!) – patrz rysunek 5.
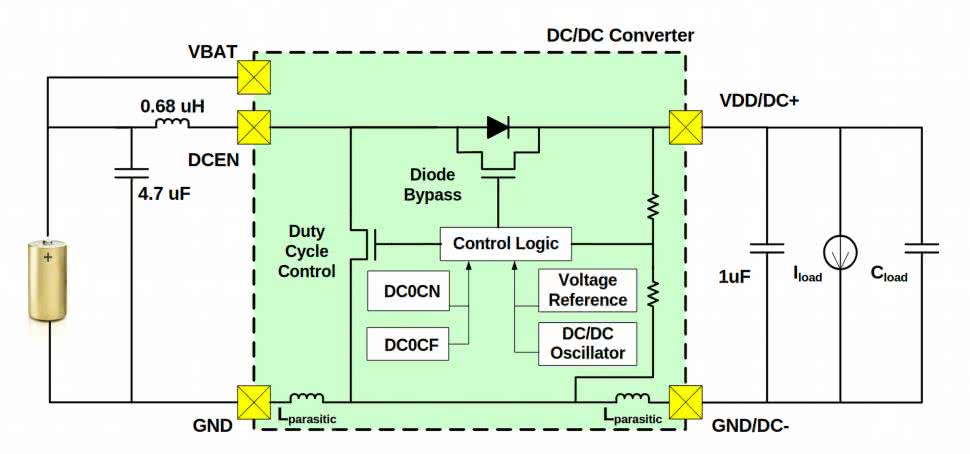
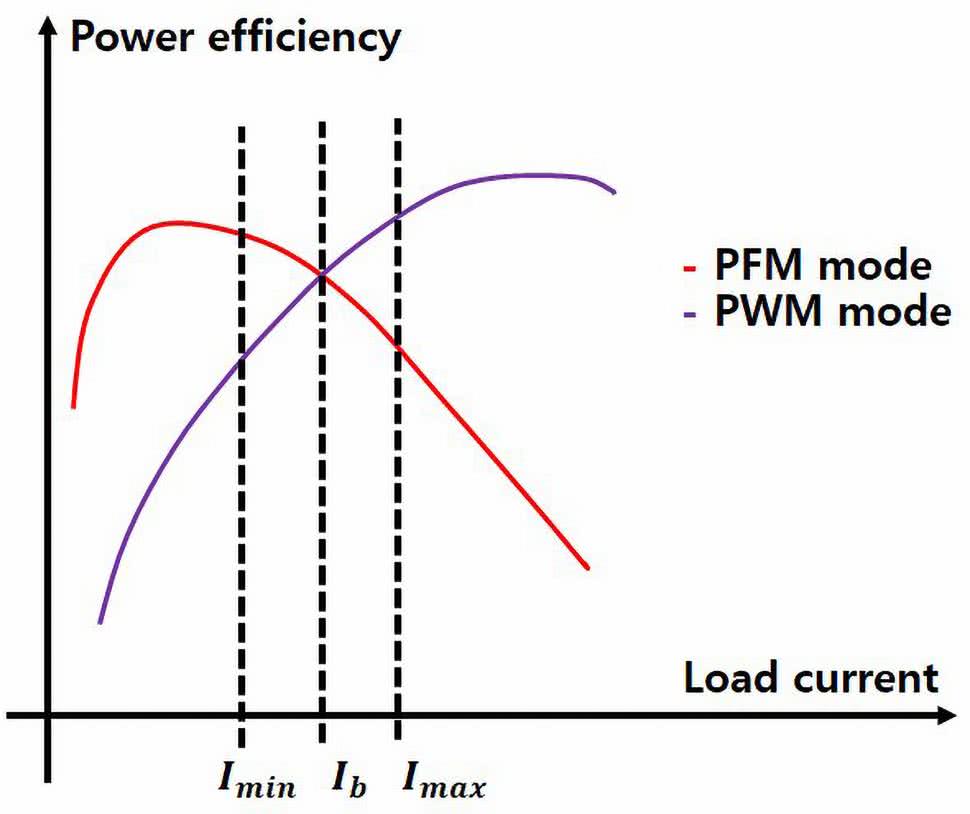
W systemach niskomocowych stosuje się specjalne konstrukcje przetwornic impulsowych pracujące w trybie pulsacyjnym (PFM, burst), które przy małych prądach obciążenia generują krótkie „paczki” impulsów, a przez resztę czasu pozostają niejako w trybie uśpienia (rysunek 6).
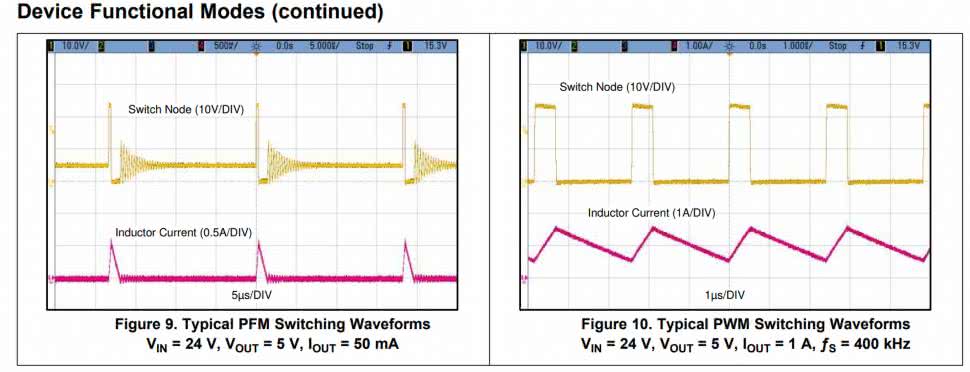
Taki tryb pracy pozwala znacząco zwiększyć sprawność konwertera DC/DC przy niskich prądach obciążenia (rysunek 7) – niektóre układy samoczynnie przełączają się pomiędzy modulacjami PFM a PWM w celu optymalizacji zużycia energii.
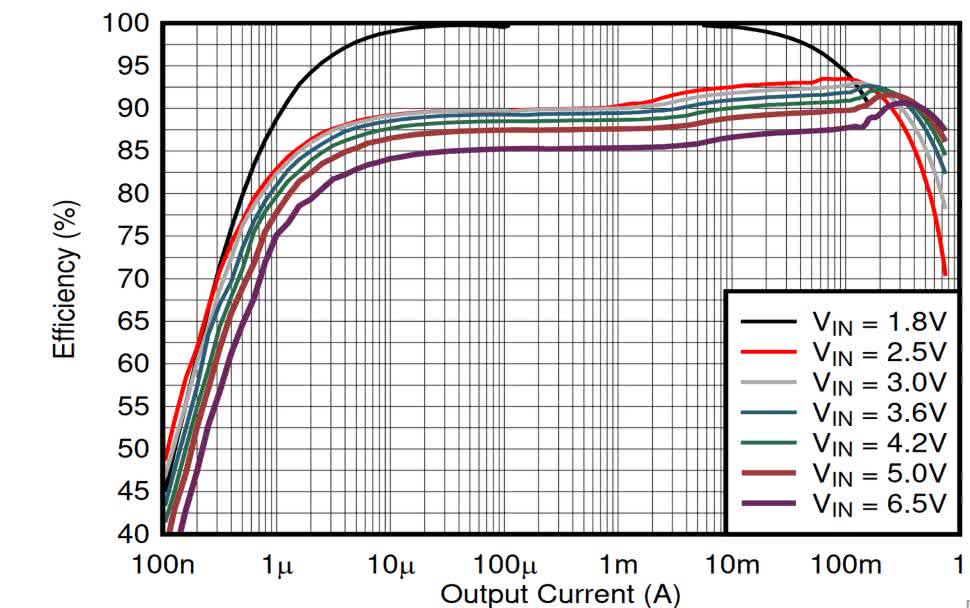
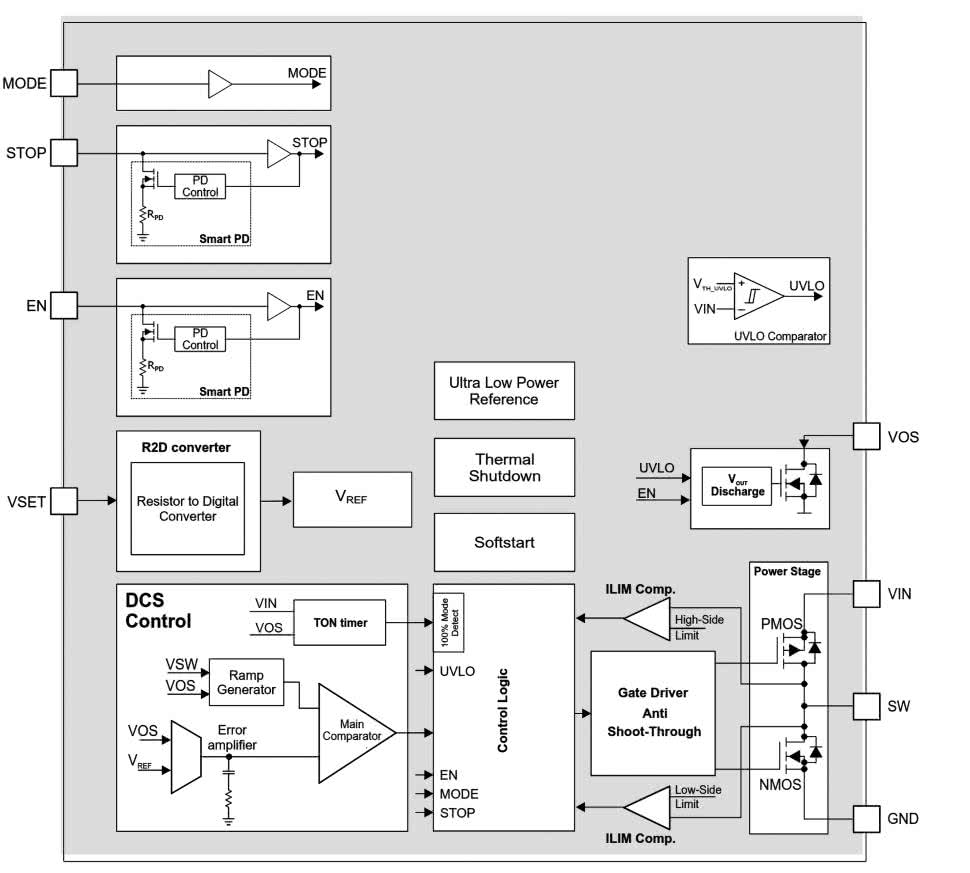
Dobry przykład to TPS62840 (rysunki 8 i 9) – przetwornica obniżająca napięcie o zakresie wejściowym 1,8...6,5 V, zdolna dostarczyć do obciążenia nawet 750 mA prądu. Mimo tak dużej wydajności, typowy prąd spoczynkowy to zaledwie 60 nA, a w trybie pełnego wypełnienia (100%) pobór wciąż pozostaje niski i wynosi zaledwie 120 nA. Tak doskonałe osiągi pozwalają uzyskać typowy IQ na poziomie 60 nA, czyli zbliżonym do czołowych stabilizatorów LDO z segmentu ULP (Ultra-Low Power).
Co ciekawe, układ występuje w trzech rodzajach obudów, z których najmniejsza mierzy zaledwie 0,97 mm × 1,47 mm. Z kolei MAX38650 (rysunek 10) marki Analog Devices to niewielka przetwornica o napięciu wejściowym 1,8...5,5 V i obciążalności do 100 mA, oferująca IQ na poziomie ok. 0,4 μA. W trybie wyłączenia prąd spada do około 5 nA.

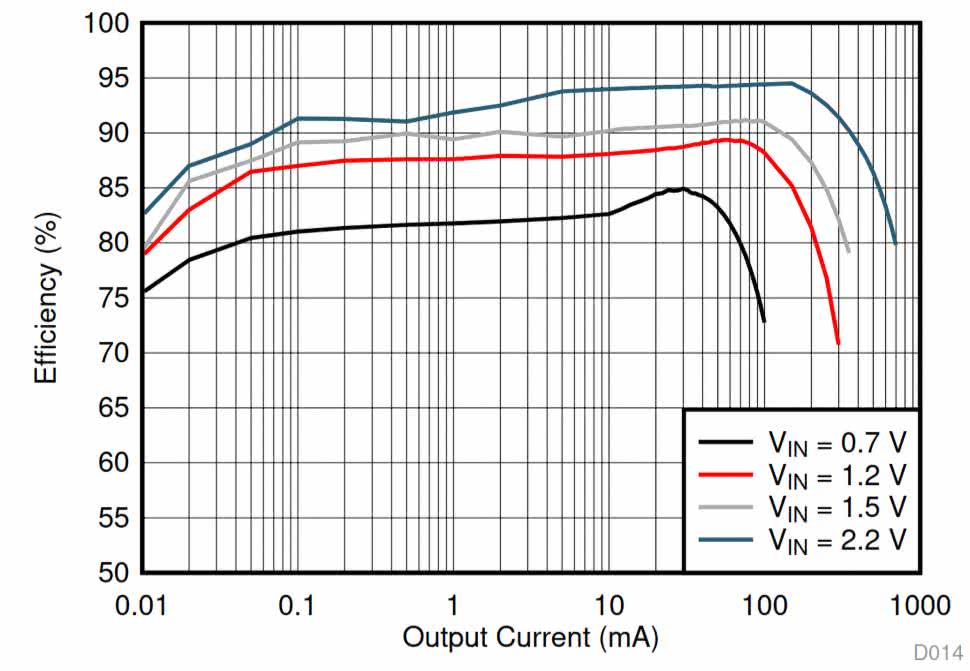
W świecie przetwornic boost także zaszły spore zmiany. Układy takie jak TPS61099x startują już przy napięciu wejściowym w okolicy 0,7 V, a w dość szerokim zakresie prądów wyjściowych i napięć zasilania utrzymują sprawność na poziomie powyżej 80% (rysunek 11).
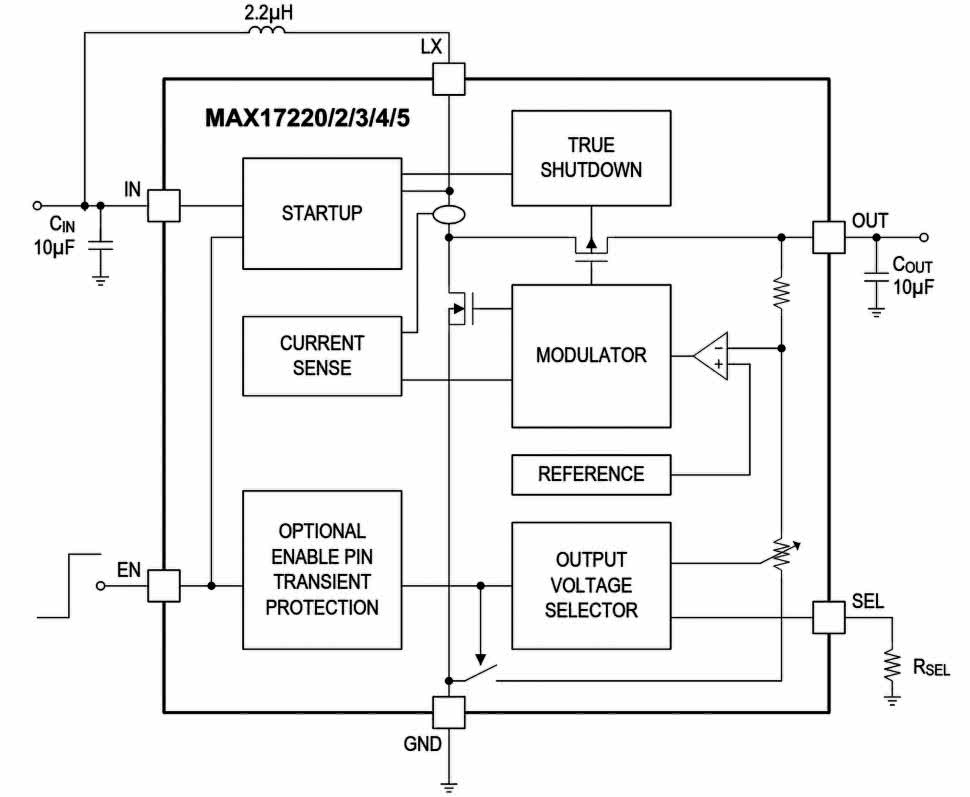
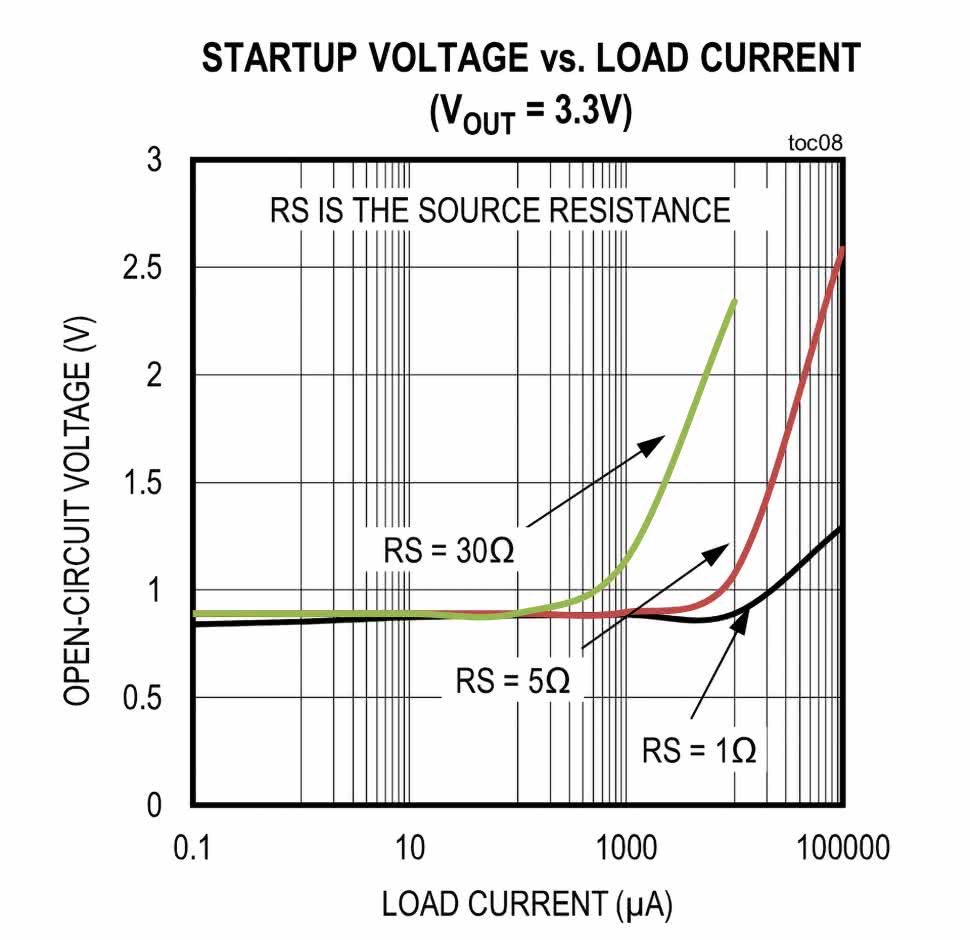
Co więcej, pobór prądu utrzymuje się na poziomie 1 μA w spoczynku lub przy niewielkim obciążeniu. Bardzo interesującym wyborem jest też rodzina układów MAX1722x (rysunek 12), która potrafi startować przy bardzo niskim napięciu wejściowym (teoretycznie od 400 mV) i – co ważne – radzi sobie także ze źródłami o relatywnie wysokiej rezystancji wewnętrznej (np. częściowo rozładowana bateria – patrz rysunek 13). Układy te nie tylko pobierają znikomy prąd statyczny (300 nA), ale oferują także funkcję „True Shutdown” (całkowite odcięcie wyjścia od wejścia, z prądem upływu na poziomie 0,5 nA).
Trzeba przy tym pamiętać, że wszystkie przetwornice impulsowe generują zakłócenia RFI, więc nawet maleńkie konwertery DC/DC stanowią główne źródło zaburzeń promieniowanych, widocznych w testach EMC urządzeń. Od strony układu widoczne są natomiast szerokopasmowe zaburzenia na liniach zasilania i masie. Dlatego też w aplikacjach z bardzo czułymi układami analogowymi zwykle stosuje się podejście hybrydowe:
- przetwornica impulsowa zasila główną część systemu (MCU, radio, peryferia),
- najbardziej wrażliwy front-end analogowy zasilany jest dodatkowo przez LDO, który filtruje szum przełączania.
Wybór między LDO a DC/DC zależy od profilu obciążenia. Jeżeli układ przez większość czasu pobiera kilka...kilkanaście μA – często paradoksalnie lepszy pod względem energetycznym będzie dobry stabilizator LDO, mimo nieporównanie niższej sprawności. Przetwornica okazuje się natomiast niezbędna, jeżeli układ pobiera wyższy prąd przez długi czas lub też mamy do czynienia z szerokim zakresem dynamiki zapotrzebowania na moc.
Źródła napięcia odniesienia o niskim dryfcie
W precyzyjnych torach pomiarowych napięcie odniesienia jest równie ważne jak sam przetwornik ADC. Dodatkowo w systemach niskomocowych oczekujemy, że źródło napięcia referencyjnego zaoferuje:
- dobrą stabilność temperaturową (niski dryft wyrażony ppm/°C),
- niski poziom szumów,
- wysoką dokładność bazową,
- oraz – a jakże! – minimalny pobór prądu.
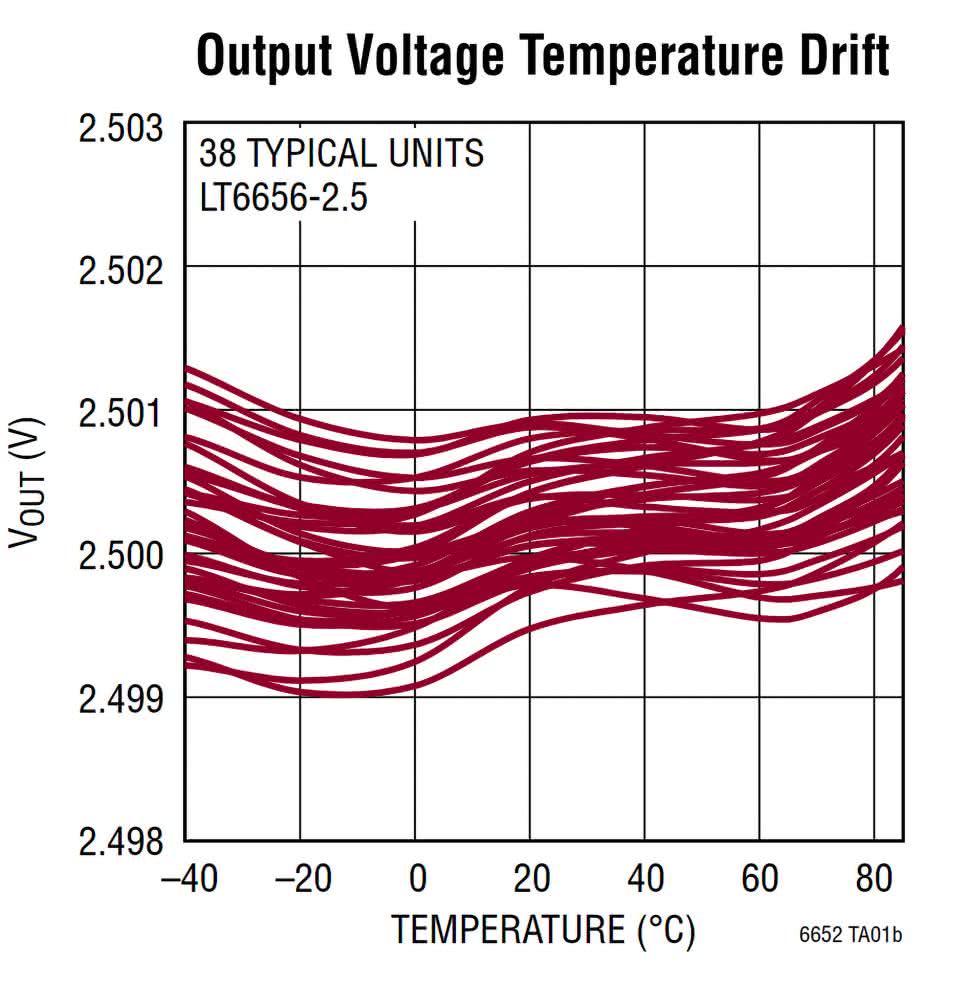
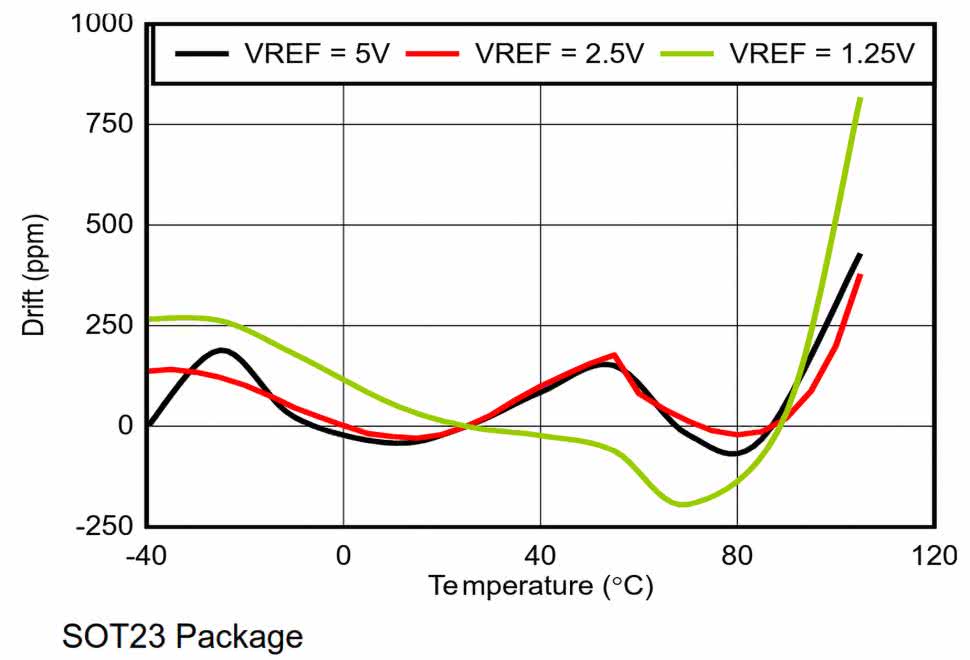
Przykładowo LT6656 (Analog Devices) to źródło typu bandgap, które przy poborze prądu około 850 nA oferuje dryft na poziomie 10 ppm/°C i dokładność początkową 0,05% (rysunek 14) – a przy tym jest w stanie dostarczyć prąd wyjściowy o natężeniu przynajmniej 5 mA. Z kolei typowe układy Texas Instruments z rodziny REF33xx (np. REF3330 – 3,0 V) mają dryft maksymalnie 30 ppm/°C przy poborze prądu na poziomie 3,9 μA i prądzie obciążenia ±5 mA. Nowsza seria TI REF35 schodzi z prądem statycznym jeszcze niżej (650 nA), oferując jednocześnie dryfty rzędu 10...12 ppm/°C (rysunek 15).
W aplikacjach niskomocowych często stosuje się niższe napięcia odniesienia (1,2...2,5 V), co pomaga ograniczyć zużycie energii zarówno przez samo źródło, jak i pozostałą część toru sygnałowego (z uwagi na mniejsze napięcia na mostkach pomiarowych czy też mniejsze prądy dzielników napięcia). Warto też pamiętać, że część układów ADC i mikrokontrolerów ma wbudowane źródła odniesienia, często wystarczające w prostych aplikacjach. Gdy jednak wymagamy wysokiej dokładności i stabilności, zewnętrzne źródło odniesienia bywa zdecydowanie lepszym wyborem – oczywiście jeżeli jesteśmy w stanie pogodzić się z faktem, że samo źródło będzie często jednym z najdroższych elementów całego urządzenia...
Wzmacniacze operacyjne klasy „nano-power”
Większość czujników analogowych – termopary, mostki tensometryczne, fotodiody itp. – generuje sygnały o bardzo małej amplitudzie. Przed podaniem na wejście ADC trzeba je zatem wzmocnić, przefiltrować, a niekiedy także przesunąć poziom odniesienia (zwłaszcza w układach zasilanych napięciem niesymetrycznym). Klasyczne, precyzyjne wzmacniacze operacyjne pobierają zwykle od kilkuset mikroamperów do kilku miliamperów, co w systemach zasilanych np. baterią guzikową jest najczęściej całkowicie nieakceptowalne. Dlatego tak ważny okazuje się wybór odpowiedniego wzmacniacza z grupy określanej zwykle jako nano-power opamp.
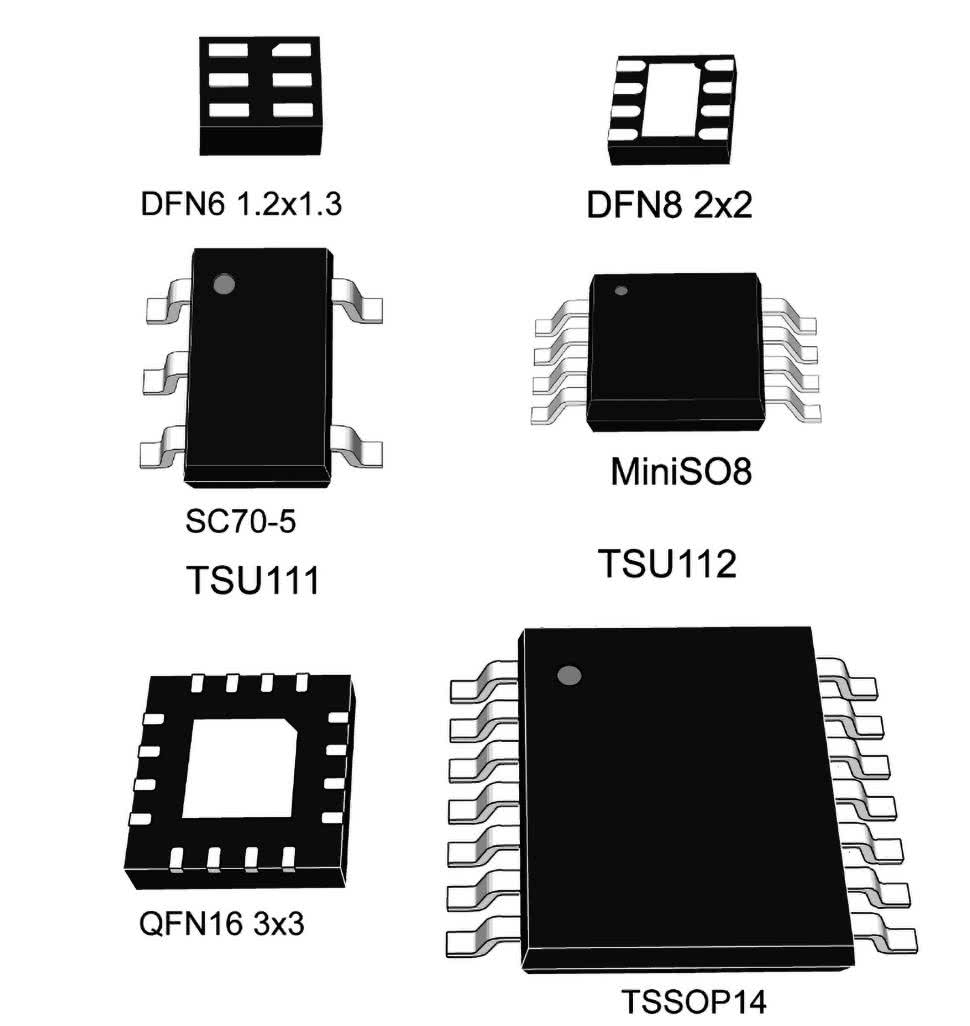
Dobrym przykładem jest produkt marki ST Semiconductor o oznaczeniu TSU111 – wzmacniacz operacyjny pobierający około 900 nA na kanał (rysunki 16 i 17), przy napięciu offsetu ok. 150 μV i GBW rzędu 11,5 kHz. Wcześniejsza generacja TSU101 była jeszcze oszczędniejsza pod względem energetycznym (580 nA), ale miała offset rzędu kilku mV – co przy słabych sygnałach z czujników może stanowić istotny problem. TSU111 pokazuje, że wymogi „nano-power” i przyzwoita dokładność dadzą się połączyć, choć to także ma swoją cenę – wąskie pasmo robocze sprawia, że wzmacniacze tego typu nadają się tylko do pracy statycznej (np. jako wtórniki/bufory napięcia DC) lub niskoczęstotliwościowej (np. tensometr w wadze łazienkowej, czujnik temperatury czy też sensor CO).
W ofercie Texas Instruments ciekawą propozycją jest rodzina LPV8xx – wzmacniacze o prądach zasilania rzędu 425 nA, offsecie dochodzącym do 300 μV i bardzo małym dryfcie (1 μV/°C). Analog Devices z kolei oferuje m.in. układ LTC2063 – wzmacniacz typu zero-drift o poborze prądu do 2 μA i offsecie wejściowym w okolicach kilku μV.
Warto pamiętać o typowych cechach takich układów:
- niski GBW – iloczyn wzmocnienia i pasma plasuje się często w zakresie kilku...kilkunastu kHz,
- mały slew rate – szybkość narastania i opadania zboczy sygnału jest bardzo niska w porównaniu do klasycznych wzmacniaczy operacyjnych i wynosi np. kilka V/ms,
- RRIO – wejścia i wyjścia często mają konstrukcję pozwalającą na pracę w pełnym zakresie napięcia zasilającego, tj. od potencjału GND (a nawet nieco niżej w przypadku wejść), aż do (niemalże) pełnego potencjału dodatniej szyny zasilającej,
- prądy polaryzacji wejść są przeważnie bardzo niskie, na poziomie pA lub nawet fA (z uwagi na zastosowaną w niskomocowych wzmacniaczach operacyjnych konstrukcję opartą na tranzystorach FET).
Do wzmacniania i buforowania sygnałów wolnozmiennych – temperatury, ciśnienia, czy nawet niektórych biopotencjałów – takie parametry okazują się w zupełności wystarczające. Ważniejszym kryterium okazuje się zatem niski poziom szumu. Z kolei konstrukcja rail-to-rail pozwala zasilać takie wzmacniacze napięciem 1,8 V czy nawet 1,5 V, co znacznie upraszcza całą topologię zasilania.
Warto wspomnieć w tym miejscu o możliwości wyłączenia niektórych modeli wzmacniaczy za pomocą przeznaczonego do tego celu wejścia cyfrowego. Przykładowo wspomniane wcześniej układy z serii LTC206x umożliwiają zejście z prądem zasilania z typowej wartości 2 μA do zaledwie 170 nA w stanie uśpienia.
Poza zwykłymi wzmacniaczami operacyjnymi dostępne są też energooszczędne komparatory (np. TLV3691 o IQ na poziomie 75 nA) oraz wzmacniacze pomiarowe o niskim poborze mocy, o których szerzej za chwilę.
Analogowe multipleksery i przełączniki niskostratne
Gdy w systemie jest kilka lub kilkanaście czujników, a przetwornik ADC mamy tylko jeden, naturalnym rozwiązaniem jest zastosowanie przełączników i multiplekserów analogowych. W wersji „klasycznej” (np. stare serie CD405x) rezystancja w stanie przewodzenia (RON) rzędu kilkudziesięciu omów i nieszczególnie małe prądy upływu nie stanowią wprawdzie problemu w prostych układach, ale w precyzyjnych systemach low-power wnoszą już zauważalnie duży błąd pomiaru.
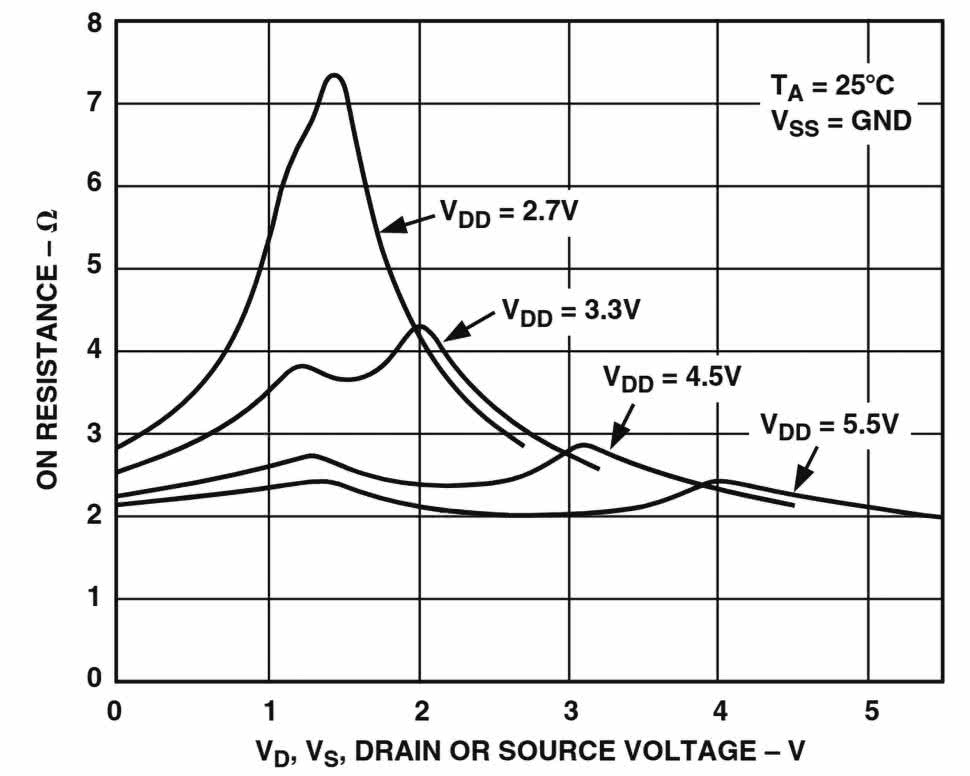
Dzisiejsze specjalizowane klucze analogowe mogą mieć rezystancję włączenia rzędu co najwyżej kilku omów i to już przy napięciu zasilania 3,3 V. Dla przykładu: Analog Devices oferuje szeroką gamę układów z serii ADG7xx, która może poszczycić się dość niską rezystancją w stanie włączenia (2,5 Ω – patrz) oraz bardzo małym prądem upływu na poziomie 100 pA. Wprawdzie pobór prądu dochodzi do 20 μA, ale wciąż nie jest to wartość zatrważająco duża, zwłaszcza w przypadku urządzeń pomiarowych dysponujących akumulatorem o nieco większej pojemności.
Zasilanie i sterowanie prostszymi przełącznikami i multiplekserami analogowymi praktycznie nie obciąża energetycznie systemu – układ CMOS pobiera prąd głównie podczas przełączania. Dzięki temu multipleksery są bardzo wygodnym narzędziem do współdzielenia jednego toru pomiarowego pomiędzy wiele czujników, co w ogólnym rozrachunku może obniżyć całkowite zapotrzebowanie energetyczne systemu, zwłaszcza w porównaniu do analogicznego rozwiązania opartego na większej liczbie przetworników ADC czy wzmacniaczy operacyjnych.
Niskoszumne front-endy analogowe dla sensorów
Na końcu łańcucha sygnałowego coraz częściej znajduje się kompletny front-end analogowy – czyli układ scalony integrujący wszystko, co potrzebne do kondycjonowania i przetwarzania sygnału wejściowego. Tego rodzaju układy są zwykle kombinacją:
- wzmacniacza operacyjnego lub instrumentalnego, często o regulowanym wzmocnieniu,
- filtrów analogowych i/lub cyfrowych,
- multipleksera (w większości przypadków),
- przetwornika ADC,
- interfejsu komunikacyjnego (zwykle SPI i/lub I²C),
- źródła napięcia odniesienia (w większości przypadków),
- wewnętrznego oscylatora (jw.).
Jeżeli jednak żaden gotowy układ AFE nie odpowiada naszym wymogom (chociażby ze względu na rozmiary obudowy czy cenę), jesteśmy zmuszenia pójść ścieżką klasyczną i zbudować układ kondycjonowania „od zera”. Poniżej prezentujemy kilka typowych scenariuszy, z jakimi mają do czynienia projektanci układów ULP.
Termometr z termoparą
Termopara typu K ma czułość około 41 μV/°C, czyli przy różnicy temperatur 100°C otrzymujemy raptem 4,1 mV. Oprócz wzmocnienia i digitalizacji sygnału napięciowego, w systemie trzeba też uwzględnić konieczność kompensacji temperatury odniesienia („zimnego” końca termopary). Idealnie nadaje się tu wzmacniacz klasy nano-power o „zerowym” dryfcie – np. LPV821 w konfiguracji ze wzmocnieniem rzędu 100...200 V/V. Niski offset (rzędu 10 μV) i mały dryft powodują, że błędy własne toru są znacznie mniejsze niż użyteczny sygnał z czujnika, a pobór prądu całości front-endu (przed samym przetwornikiem ADC) pozostaje w zakresie pojedynczych mikroamperów.
Tor termoparowy zwykle uzupełniamy o:
- filtr dolnoprzepustowy (temperatura przeważnie zmienia się dość wolno, więc można mocno ograniczyć pasmo, redukując przy tym szumy wejściowe),
- czujnik temperatury otoczenia (np. scalony sensor cyfrowy lub dokładny termistor), który służy do kompensacji zimnego końca termopary,
- ADC o możliwie wysokiej rozdzielczości (16...24 bity, topologia ΔΣ) lub ostatecznie dobry przetwornik wbudowany w MCU, pracujący w trybie nadpróbkowania.
Jeżeli zależy nam na maksymalnej prostocie urządzenia, możemy skorzystać ze specjalizowanego układu typu AD8495 – kompletny przetwornik scalony (termoparowy) pobiera prąd rzędu 180 μA, a zawiera w sobie różnicowy wzmacniacz wejściowy i czujnik temperatury do kompensacji zimnego końca. Z uwagi na znacznie większy pobór prądu, układ ten nadaje się jednak głównie do okresowego pomiaru (np. raz na minutę), niż do częstych pomiarów o wysokiej częstotliwości próbkowania.
Tor dla mostka tensometrycznego (czujnik ciśnienia)
Większość czujników ciśnienia, siły czy wagi to mostki Wheatstone’a o rezystancji np. 5...10 kΩ, dające różnicę napięcia rzędu kilku...kilkudziesięciu mV na tle offsetu wspólnego, równego zazwyczaj połowie napięcia zasilającego. Tu naturalnym wyborem jest wzmacniacz pomiarowy o możliwie wysokim CMRR (przede wszystkim dla DC oraz pasma sieciowego, czyli 50/60 Hz), niskim szumie i – w wersji low-power – możliwie małym IQ.
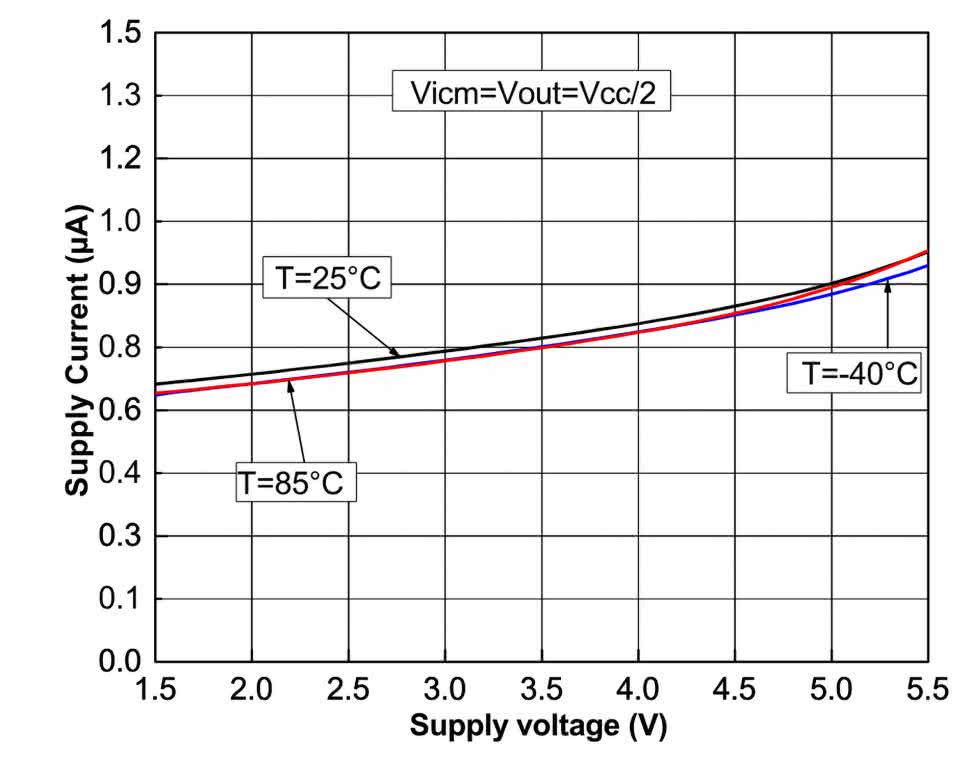
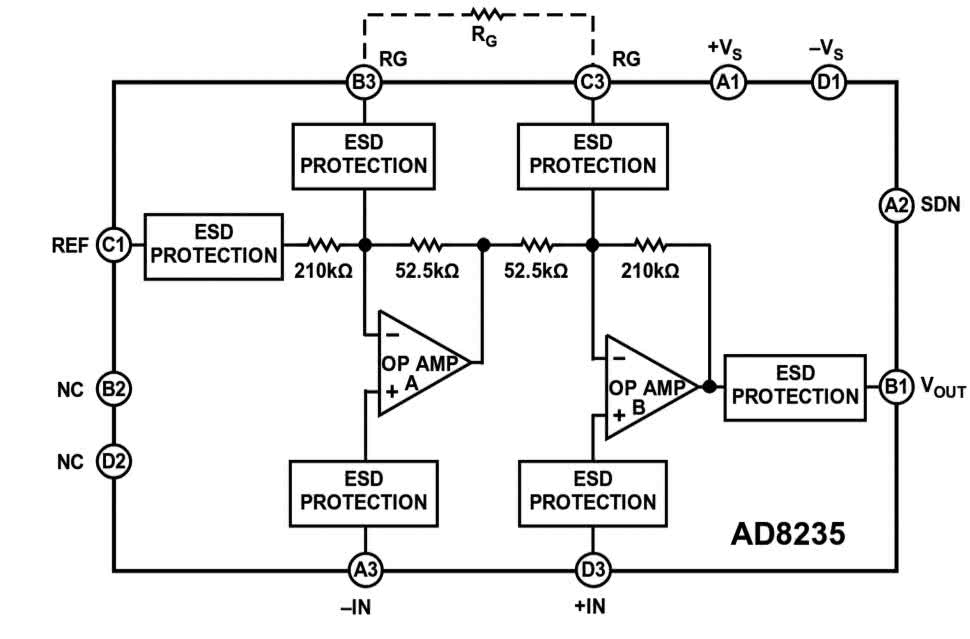
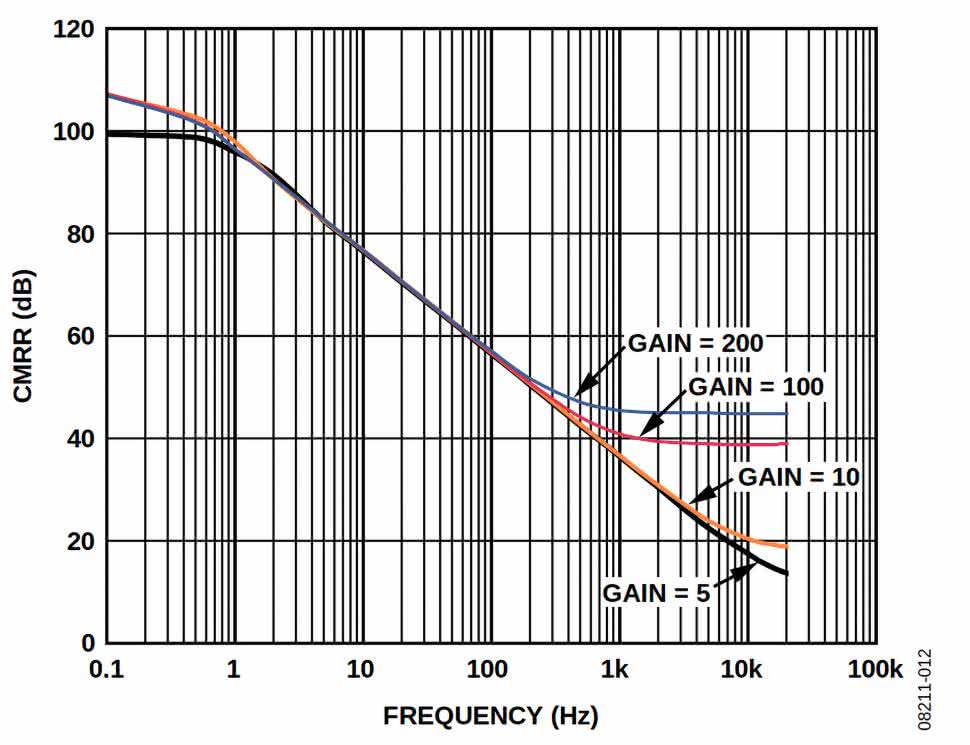
Przykładowy układ AD8235 pobiera maksymalnie około 40 μA, pracuje już przy napięciu 1,8 V, a jego CMRR przy typowych wzmocnieniach utrzymuje się na poziomie powyżej 100 dB w zakresie częstotliwości do kilkuset miliherców i spada do 60 dB przy 50/60 Hz. Wzmocnienie ustawia się jednym rezystorem, a wyjście można podłączyć bezpośrednio do ADC. Co więcej, ponieważ w systemach niskomocowych często stosuje się kluczowanie zasilania czujnika (mostek jest zasilany tylko na czas pomiaru, po czym napięcie jest odcinane tranzystorem MOSFET), wzmacniacze takie jak AD8235 często są wyposażone w wejście pozwalające na uśpienie układu. W stanie wyłączenia wzmacniacz pobiera prąd rzędu pojedynczych nanoamperów.
Zasilanie front-endu czujnika z baterii guzikowej
Typowy scenariusz: mały czujnik środowiskowy (temperatura, wilgotność, ciśnienie) zasilany jest za pomocą baterii CR2032. Mikrokontroler i radio mogą być zasilane bezpośrednio z baterii, ale dla domeny analogowej potrzebne jest zwykle stabilniejsze napięcie – np. 1,8 lub 2,5 V. Do tego celu świetnie nadają się niskomocowe stabilizatory LDO, np. wspomniany NCP171.
Jeśli front-end w czasie pomiaru potrzebuje chwilowo większych prądów (np. dla krótkotrwałego zasilenia czujnika, ładowania kondensatorów, rozpoczęcia transmisji radiowej itp.), można przełączać LDO w tryb „aktywny”, w którym rosną parametry dynamiczne i wydajność prądowa, kosztem dodatkowych mikroamperów prądu własnego. Alternatywnie, przy bardziej „skokowym” profilu obciążenia, można użyć przetwornicy typu buck (jak TPS62840) i zasilać z niej zarówno MCU, jak i tor analogowy, a najbardziej czułe fragmenty sygnału odsprzęgać za pomocą dodatkowych filtrów i ew. małego stabilizatora LDO.
W projektowaniu układów ULP (ultra-low power) kluczowe jest zaplanowanie, co naprawdę musi być zasilane ciągle, a co można odcinać tranzystorem lub za pomocą wejścia sterującego (EN, SHDN itp.). Nierzadko okazuje się, że ciągłego zasilania wymaga tylko niewielki fragment toru (np. komparator wykrywający zdarzenie), a resztę można wybudzać tylko co pewien czas.
Bezprzewodowy czujnik ciśnienia
Kolejny przykład to czujnik ciśnienia atmosferycznego z bezprzewodową transmisją (np. LoRa), zasilany z baterii litowej 3,6 V typu 1/2AA. Pomiar co 5 minut, transmisja raz na godzinę lub rzadziej.
Przykładowy front-end może wyglądać następująco:
- Mostkowy (niewzmocniony) czujnik ciśnienia jest zasilany z precyzyjnego LDO 3,0 V, ale tylko w czasie pomiaru (załączany przez tranzystor P-MOS lub wejście sterujące samego stabilizatora).
- Sygnał z mostka wzmacnia precyzyjny, niskoszumny wzmacniacz instrumentalny (scalony lub zbudowany na bazie osobnych wzmacniaczy operacyjnych, np. OPA333) – tym razem pobór prądu to przynajmniej 20 μA, ale tylko przez kilkanaście milisekund.
- ADC (np. wbudowany w mikrokontrolerze lub osobny układ typu ΔΣ) działa wyłącznie w czasie pomiaru, przez pozostały okres pozostaje w stanie głębokiego uśpienia.
Średni pobór prądu front-endu to suma krótkich impulsów kilkudziesięciu μA co kilka minut, plus prąd spoczynkowy elementów, które muszą pracować ciągle (zwykle bardzo niewielki). Pod względem bilansu energetycznego układ taki prezentuje się zdecydowanie lepiej niż alternatywna wersja z ciągłym podtrzymywaniem zasilania mostka i wzmacniacza. Co ważne, dokładność pomiaru pozostaje wysoka, bo w czasie pracy toru analogowego korzystamy z dobrej jakości wzmacniacza i precyzyjnego źródła napięcia odniesienia.
Uwagi projektowe dla układów niskomocowych
Na koniec zebraliśmy kilka praktycznych wskazówek, które warto mieć z tyłu głowy przy projektowaniu systemów low-power z torami analogowymi.
- Dopasowanie typu regulatora do profilu obciążenia
Jeżeli układ przez 99% czasu śpi, to kluczowy okazuje się statyczny pobór prądu IQ – najlepiej rzędu dziesiątek lub co najwyżej setek nA. Jeżeli obciążenie ma charakter bardziej ciągły niż impulsowy, konieczna okaże się zwykle przetwornica impulsowa o dobrej sprawności. To samo dotyczy także układów o wysokiej dynamice poboru prądu, np. gdy sporadyczna transmisja odbywa się z użyciem prądożernego modułu GSM. Im mniejszy jest dopuszczalny spadek napięcia na LDO (określany mianem drop-out voltage), tym lepiej wykorzystana pojemność baterii lub akumulatora, zwłaszcza gdy pod koniec rozładowywania napięcie drastycznie spada, a rezystancja wewnętrzna ogniwa rośnie.
- Rozdzielenie zasilania analogowego od cyfrowego
Gwałtowne skoki prądu po stronie cyfrowej (MCU, radio, pamięć) potrafią bardzo skutecznie „wstrząsnąć” czułą domeną analogową. Warto stosować osobne gałęzie zasilania (np. LDO dla toru pomiarowego, przetwornica dla reszty systemu), filtry RC, dławiki ferrytowe i przemyślane prowadzenie mas oraz płaszczyzn zasilania.
- Uwaga na prądy upływu i polaryzacji!
Przy stosowaniu rezystorów rzędu megaomów każdy nanoamper zaczyna być widoczny. Warto zatem wybierać wzmacniacze o prądach wejściowych na poziomie pikoamperów, stosować pierścienie ekranujące (tzw. guard rings) w newralgicznych węzłach, a także zadbać o czystość PCB i stosowanie odpowiednich powłok konformalnych. W specyfikacji tranzystorów, przełączników analogowych i ADC zawsze trzeba sprawdzić prądy upływu w najwyższej spodziewanej temperaturze pracy.
- Świadomy wybór pasma i szumu
Im szersze pasmo i mniejszy poziom szumów własnych, tym z reguły większy pobór prądu – dotyczy to głównie (ale nie tylko) wzmacniaczy operacyjnych. Dla wielu czujników środowiskowych wystarczy GBW dochodzący do kilku lub kilkunastu kiloherców. Co ważne, lepiej użyć wolniejszego, ale oszczędnego wzmacniacza i dodatkowo ograniczyć szum przez filtrację, niż „na wszelki wypadek” zastosować szumiący i prądożerny wzmacniacz o iloczynie wzmocnienia i pasma na poziomie 1...10 MHz.
- Znaczenie temperatury i dryftów
Parametry podawane w środku zakresu (25°C) mogą prezentować się świetnie, ale system IoT w terenie będzie pracował w zakresie od –20 do +60...70°C. Trzeba zatem sprawdzić, jak zmieniają się wartości IQ, RON, prądy upływu i polaryzacji, napięcia odniesienia czy offsety wzmacniaczy w pełnym zakresie temperatur i ocenić, czy sumaryczny błąd jest akceptowalny. Często opłaca się przewidzieć prostą procedurę kalibracji fabrycznej lub okresowej.
- Optymalne wykorzystanie trybów uśpienia
Większość współczesnych elementów analogowych jest wyposażona w piny sterujące zasilaniem (EN/SHDN). Warto z nich korzystać i wyłączać wszystko, co nie jest bezwzględnie potrzebne w danym momencie: wzmacniacze, źródła napięcia odniesienia, przetworniki, mostki itp. Trzeba tylko uwzględnić czasy „wybudzania” – np. stabilizacji napięcia odniesienia, ustalania parametrów pracy mostka czy kalibracji czujnika. Osobny temat, którym jednak nie będziemy się bliżej zajmować w ramach tego artykułu, to optymalizacja poboru energii przez sam mikrokontroler – tutaj możliwości są potężne, zwłaszcza w ramach rodzin ULP (np. STM32L4), o czym traktuje osobny artykuł w tym wydaniu „Elektroniki Praktycznej”.
Podsumowanie
Projektowanie niskomocowych torów zasilania i front-endów analogowych to sztuka zachowania kompromisu między poborem mocy, szumem, dokładnością, kosztami i złożonością systemu. Dzisiejsza oferta LDO, przetwornic, nanoamperowych wzmacniaczy operacyjnych i źródeł odniesienia daje konstruktorowi bardzo bogaty zestaw „klocków”. Od tego, w jaki sposób je połączymy, zależy to, czy nasze urządzenie będzie wymagało wymiany baterii co kilka miesięcy, czy też poradzi sobie z niezawodną i nieprzerwaną pracą przez wiele lat.
inż. Przemysław Musz, EP












