 Zaloguj
Zaloguj




Prawdziwy automat, czy tylko "pomocna dłoń"?
Podstawowa definicja robota zakłada posiadanie przez niego pewnej autonomii, umożliwiającej mu wykonywanie określonych zadań w sposób automatyczny. Przykładowo - słownik internetowy PWN określa robota jako "urządzenie zastępujące człowieka przy wykonywaniu niektórych czynności", a słowo klucz w tym przypadku to "zastępowanie". Od robota medycznego powinniśmy więc oczekiwać samoczynnej realizacji, jeśli nie całego zabiegu, to przynajmniej pewnego zakresu podzadań, składających się na operację. A jednak w praktyce istnieje niewiele przykładów tego typu rozwiązań, które (teoretycznie) byłyby w stanie nie tylko z sukcesem przejść przez niebotycznie wymagający proces certyfikacji i badań klinicznych, ale także… zyskać zaufanie lekarzy, odpowiedzialnych za zdrowie i życie pacjentów.
Okazuje się, że w rzeczywistych warunkach klinicznych taka autonomia wcale nie jest najważniejsza - o wiele istotniejsze jest bowiem odpowiednie wsparcie chirurga, którego doświadczeniu, wiedzy i umiejętnościom jeszcze przez wiele lat nie dorówna żadne urządzenie techniczne. W efekcie opowieści o inteligentnych maszynach, zdolnych do prowadzenia zabiegów operacyjnych bez udziału człowieka (lub tylko pod jego nadzorem), można jak na razie z pobłażliwym uśmiechem włożyć między bajki.
Mało tego - życie zweryfikowało także drugie, bardzo ważne założenie, które przyświecało twórcom pierwszych telemanipulatorów chirurgicznych, stosowanych do wykonywania operacji na odległość (tzw. telechirurgia). Tak naprawdę bowiem - pomimo że współczesne roboty chirurgiczne faktycznie mogą być sterowane za pośrednictwem łączy teleinformatycznych nawet na ogromnym dystansie - w niemal wszystkich aplikacjach konsola sterująca, obsługiwana przez chirurga, znajduje się… co najwyżej kilka metrów od stołu operacyjnego. Dlaczego zatem użycie robotów chirurgicznych nadal ma w ogóle jakikolwiek sens praktyczny? Z jakimi ograniczeniami zmagają się inżynierowie, pracujący nad nowymi modelami robotów medycznych? Na te i inne pytania postaramy się znaleźć odpowiedzi w niniejszym materiale.
Roboty laparoskopowe
U zdecydowanej większości osób pierwsze skojarzenie z hasłem "robot medyczny" odnosi się do systemów przeznaczonych do prowadzenia operacji laparoskopowych. Technika laparoskopowa - dzięki minimalnej inwazyjności, znacząco redukującej zarówno czas hospitalizacji, jak i rekonwalescencji pacjentów - została dość wcześnie zaadaptowana do świata najnowszych technologii medycznych, czego efektem jest powszechność robotów chirurgicznych na całym świecie. Dziś, po 13 latach od instalacji pierwszego w Polsce systemu da Vinci marki Intuitive Surgical (miało to miejsce we wrocławskim Wojewódzkim Szpitalu Specjalistycznym w 2010 roku), polscy pacjenci mogą liczyć na refundację NFZ na niektóre zabiegi w asyście robota (taka możliwość pojawiła się dopiero 1 sierpnia 2023 r.), zaś za granicą operacje robotowe są już w kilku obszarach chirurgii standardem. Nawiasem mówiąc, wrocławski robot wykonał swoją ostatnią operację 8 grudnia 2023 r. - zaledwie kilka miesięcy po wprowadzeniu refundacji maszyna musiała planowo przerwać służbę z uwagi na zakończenie okresu technicznej przydatności do użytku (fotografia 1).

Każdy zestaw do operacji robotowych składa się z trzech głównych elementów: wózka mobilnego z ramionami narzędziowymi, konsoli sterującej (stanowiącej interfejs HMI, obsługiwany przez siedzącego przy nim chirurga) oraz szafy z głównym komputerem, systemem wizyjnym, sterownikiem oświetlacza oraz urządzeniem do elektrokoagulacji (fotografia 2). W niektórych przypadkach możliwa jest praca w trybie dwukonsolowym, co niebywale zwiększa możliwości w zakresie treningu, w tym nawet śródoperacyjnego (jedna z konsol pracuje niejako w trybie wirtualnym, podczas gdy druga pełni funkcję nadrzędnego kontrolera, obsługiwanego przez głównego operatora).

Wspomniany już system da Vinci jest pierwszym robotem chirurgicznym, który w takim stopniu rozpowszechnił się w szpitalach na całym świecie - do tej pory za pomocą ponad 7,5 tysiąca maszyn wykonano przeszło 12 milionów operacji w 70 krajach, a materiały Intuitive Surgical wskazują, że średnio co 16,8 sekundy gdzieś na świecie rozpoczyna się kolejny zabieg z użyciem tego ultranowoczesnego sprzętu. Dziś najbardziej zaawansowanym modelem oferowanym przez amerykańskiego producenta jest czteroramienny robot da Vinci Xi (fotografia 3), kosztujący w chwili pisania niniejszego artykułu około 13 milionów złotych.

Swoją topową pozycję w portfolio Intuitive Surgical da Vinci Xi zawdzięcza m.in. poprawionej ergonomii, bardziej smukłemu designowi ramion oraz szeregowi dodatkowych funkcjonalności (zintegrowane sterowanie stołem operacyjnym, zestawy automatycznych ustawień czy też rozbudowane opcje pozycjonowania wózka mobilnego, zawierającego mechatroniczne ramiona). Tańsza wersja systemu - da Vinci X (fotografia 4) - pod wieloma względami nie ustępuje jednak młodszemu bratu, wciąż jest bowiem jednym z najbardziej zaawansowanych robotów medycznych na świecie.

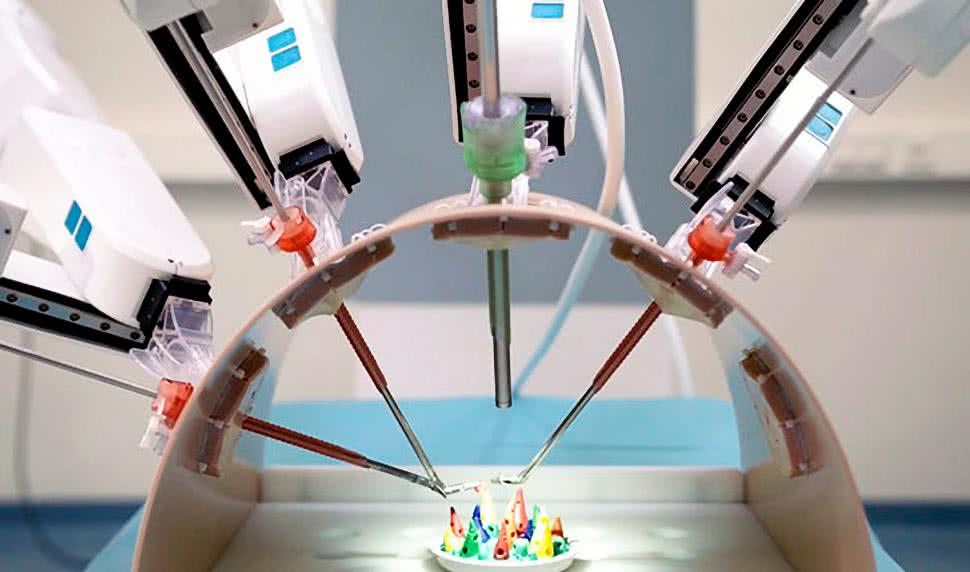
Bardzo interesującym elementem ekosystemu da Vinci pozostaje model da Vinci SP (fotografia 5). Robot - w odróżnieniu od opisanych wcześniej modeli X oraz Xi - zawiera tylko jedno ramię, przeznaczone jednak do obsługi aż czterech narzędzi, umieszczonych wokół wspólnej tulei, wprowadzanej do ciała pacjenta. Laparoskopia z dostępu jednoportowego (określana mianem operacji "przez dziurkę od klucza") znacząco redukuje liczbę blizn na ciele pacjenta (ze standardowych 4 lub 5 do zaledwie jednej), umożliwia ponadto bardziej efektywne operowanie w trudno dostępnych miejscach lub obszarach o niewielkiej objętości (np. w chirurgii szyi). Wymaga to jednak rozwiązania szeregu problemów technicznych.

Zamiast czterech osobnych narzędzi, umieszczonych na sztywnych tulejach, potrzebujemy bowiem konstrukcji, z których każda ma dodatkowe stopnie swobody - wszystkie narzędzia, złożone w jedną, równoległą "wiązkę", są bowiem wsuwane do organizmu pacjenta przez wspólny port, a następnie rozkładane tak, by uzyskać standardowe położenia poszczególnych przyrządów (główne narzędzia - prawe i lewe, narzędzie pomocnicze oraz tor wizyjny z miniaturową kamerą i silnym oświetlaczem). Patrząc na fotografie końcówek robota da Vinci SP (fotografia 6), trudno nie odnieść wrażenia, że stanowi on spełnienie futurystycznych wizji sprzed lat, kiedy o tego typu operacjach można było czytać jedynie na stronach czasopism popularnonaukowych bądź powieści science fiction.

Diametralnie inne rozwiązanie w zakresie pozycjonowania kamery stereoskopowej zaproponowała firma Vicarious Surgical. W tym przypadku nie mamy już bowiem do czynienia z elastycznym endoskopem, zdolnym do wyginania się w kilku miejscach (niczym wąż) - zamiast tak rozbudowanej konstrukcji, projektanci zatrudnieni w start-upie zdecydowali się pójść po linii najmniejszego oporu, instalując dwie kamery wraz z oświetlaczami LED w specjalnej kapsule (fotografia 7), która - po wprowadzeniu do ciała pacjenta przez port laparoskopowy - obraca się o 90°, umożliwiając obrazowanie operowanych tkanek (fotografia 8). W przypadku samych ramion zastosowanie konstrukcji wieloprzegubowej było już oczywiście nieodzowne, stąd nie powinno dziwić pewne podobieństwo do opisanego wcześniej systemu da Vinci SP.


Rzecz jasna, na świecie wciąż powstają konkurencyjne roboty chirurgiczne, często bardzo zbliżone pod względem ogólnej koncepcji konstrukcyjnej do rozwiązań, opracowanych przez Intuitive Surgical. Niemiecki system o nazwie avatera (fotografia 9) odróżnia się od produktów amerykańskiego potentata przede wszystkim jednorazowymi narzędziami laparoskopowymi, z których wszystkie (oprócz 10-milimetrowej kamery endoskopowej) mają średnicę tulei równą 5 mm. Co ważne, konstruktorzy robota avatera dostrzegli problemy z komunikacją głosową pomiędzy chirurgiem a resztą personelu znajdującego się w sali operacyjnej - zamiast obszernej, zabudowanej konsoli, zasłaniającej uszy oraz usta chirurga, niemieccy inżynierowie opracowali zatem wyjątkowo lekką, kompaktową konstrukcję, dającą pełną swobodę podczas porozumiewania się z innymi członkami zespołu operacyjnego (fotografia 10).

Rynek robotyki chirurgicznej stopniowo podbijają nie tylko systemy mniej lub bardziej zbliżone do amerykańskiego da Vinci, ale także projekty odróżniające się od konkurencji pod względem konkretnych parametrów lub rozwiązań - warto wspomnieć chociażby o robocie Senhance marki Asensus Surgical, która obok narzędzi 5-milimetrowych ma w swojej ofercie także końcówki 3-milimetrowe (fotografia 11). Całe narzędzie ma zatem średnicę zewnętrzną na poziomie… igły do biopsji gruboigłowej! Co ciekawe, nadmiarowa konstrukcja łańcucha kinematycznego daje możliwość ustalenia "cyfrowego punktu podparcia" ramion, co minimalizuje traumatyzację tkanek otaczających porty laparoskopowe.

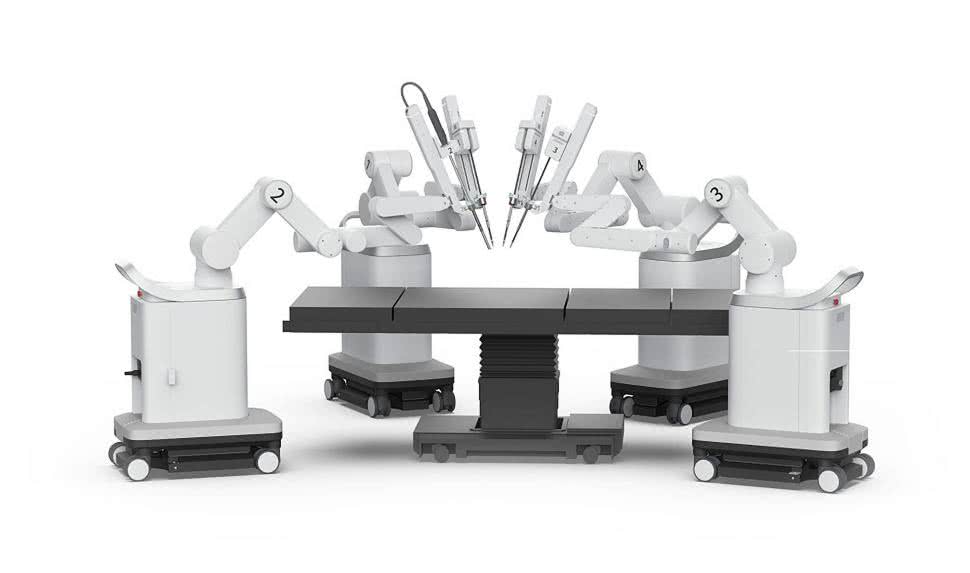
Diametralnie inne podejście do konstrukcji mechatronicznych systemów chirurgicznych prezentuje robot Versius brytyjskiej marki CMR Surgical. W tym przypadku nie mamy już do czynienia z pojedynczą platformą mobilną, na której z jednej, wspólnej kolumny wyprowadzone są wszystkie ramiona robota. Zamiast niej otrzymujemy bowiem osobne wózki (fotografia 12), które mogą być dowolnie rozmieszczane w zależności od potrzeb: rodzaju zabiegu, wybranego przez chirurgów dostępu operacyjnego, a nawet składu i liczebności zespołu.

Rzecz jasna, takie rozwiązanie stwarza kolejne problemy techniczne do obejścia - konieczne jest bowiem dokładne przemyślenie sposobu unikania kolizji pomiędzy poruszającymi się ramionami, co w przypadku swobodnie rozstawianych manipulatorów jest znacznie trudniejsze niż w systemach o "sztywnym" układzie odniesienia. Versius to zresztą niejedyny system chirurgiczny, oparty na niezależnych ramionach - podobne rozwiązanie zaproponowała chińska firma Ronovo Surgical, oferująca system Carina (fotografia 13), choć w tym przypadku znacznie większe podstawy jezdne - w porównaniu do maszyny CMR Surgical - mogą okazać się nieco mniej wygodne w użyciu, zwłaszcza na mniejszych blokach operacyjnych. Co ciekawe, marka chwali się na swojej stronie oficjalnej, że stworzenie kompletnej koncepcji projektu zajęło jej jedynie 3 miesiące, a już po kolejnych 7 miesiącach firma dysponowała prototypem funkcjonalnym i rozpoczynała testy na zwierzętach...
Jeszcze inną koncepcję zastosowano w jednym z pierwszych robotów używanych w warunkach klinicznych - system ZEUS amerykańskiej firmy Computer Motion (wchłoniętej później przez Intuitive Surgical) miał ramiona montowane bezpośrednio do specjalnego stołu operacyjnego (fotografia 14), co z jednej strony dawało sporą oszczędność miejsca wokół stołu, z drugiej zaś z pewnością stanowiło pewne utrudnienie podczas wstępnego pozycjonowania pacjenta.
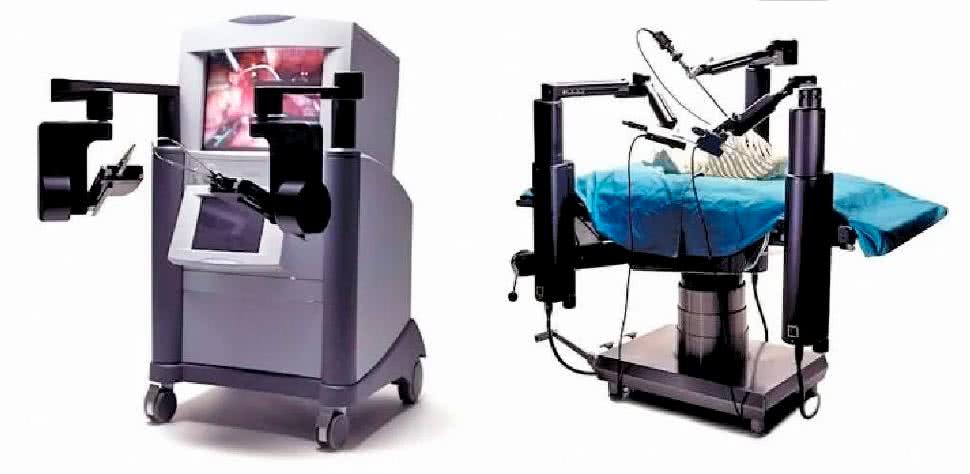
Ten sposób montażu znacznie lepiej sprawdza się natomiast w przypadku pojedynczych ramion, stosowanych do sterowania kamerą endoskopową - ta właśnie część robota ZEUS była zresztą tożsama z jego poprzednikiem, manipulatorem AESOP, opracowanym na początku lat 90. XX wieku. Co ciekawe, podobne założenie projektowe zastosowali polscy konstruktorzy w projekcie robota Robin Heart 2 (fotografia 15).
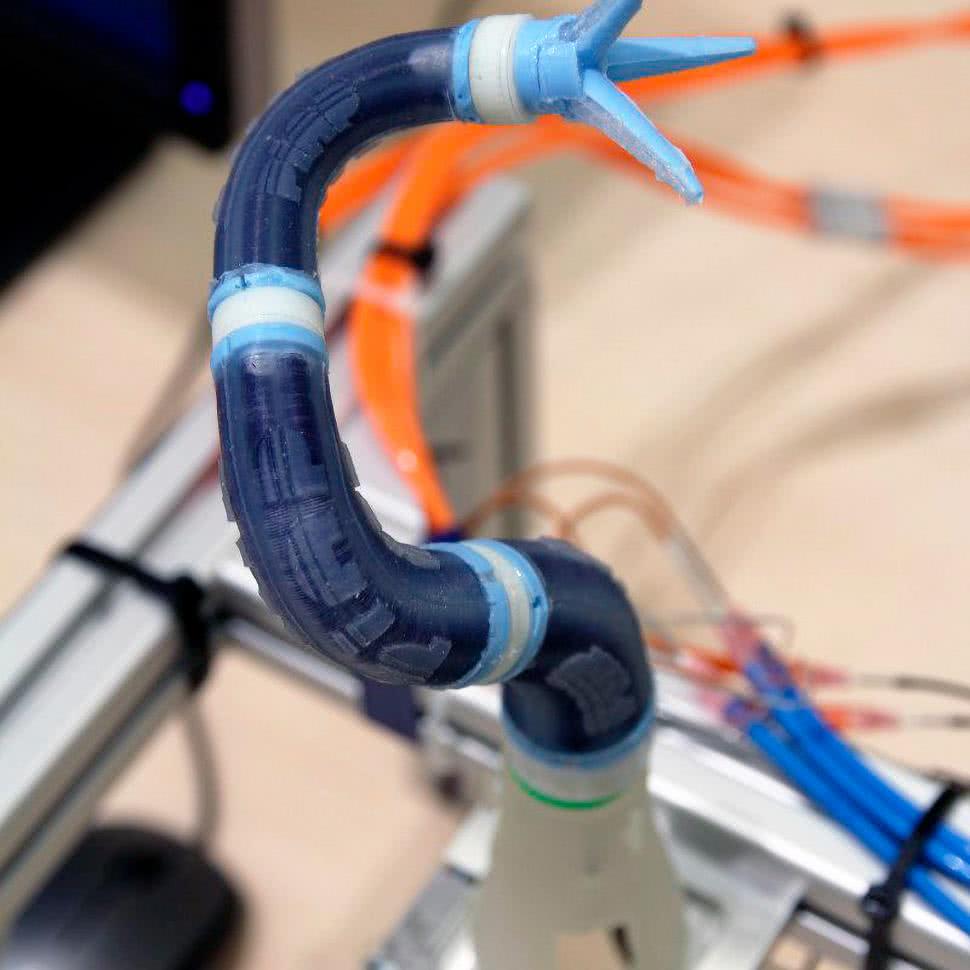
Na marginesie warto dodać, że dwie instytucje z naszego kraju (Przemysłowy Instytut Automatyki i Pomiarów oraz Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi) brały także udział w dużym, międzynarodowym projekcie STIFF-FLOP, mającym na celu rozwój systemów ramion o kontrolowanej elastyczności dla potrzeb operacji, prowadzonych w najtrudniej dostępnych obszarach ciała ludzkiego (fotografia 16).
Roboty do operacji ortopedycznych
Drugą - po robotach laparoskopowych - kategorię robotów chirurgicznych stanowią maszyny przeznaczone do operacji ortopedycznych. W tym przypadku założenia projektowe są już diametralnie inne niż we wszystkich omówionych wcześniej rodzajach robotów laparoskopowych, a różnice te wynikają wprost z odmiennych potrzeb chirurgów. Podczas gdy roboty laparoskopowe są nawigowane wewnątrz ciała pacjenta na drodze sprzężenia wizyjnego (chirurg widzi trójwymiarowy obraz tkanek i na tej podstawie pozycjonuje narzędzia), maszyny do aplikacji ortopedycznych bazują na ściśle określonych wytycznych, przygotowanych uprzednio na etapie planowania operacji. Planowanie to opiera się na cyfrowych, trójwymiarowych modelach kości pacjenta, utworzonych z wyników badań obrazowych (zwykle tomografii komputerowej) - po ustaleniu trajektorii wprowadzania narzędzia czy też implantu robot pomaga w pozycjonowaniu instrumentu, np. wiertarki, służącej do wykonywania otworów pod śruby kostne. Niektóre konstrukcje wyposaża się w zintegrowane głowice narzędziowe, zatem oprócz pozycjonowania przejmują one od chirurga także zadanie właściwej obróbki kości.

Przykładem opisywanego systemu może być robot Mako (fotografia 17), stosowany do operacji endoprotezoplastyki całkowitej stawu biodrowego (nazywanej potocznie "wymianą stawu biodrowego") oraz kolanowego. Na podstawie obrazów tomograficznych (rysunek 1) chirurg planuje dokładne miejsce, do którego zostanie następnie wprowadzona głowica specjalnej frezarki, przygotowującej miejsce pod umieszczenie sztucznej panewki stawu. Dokładne ustawienie narzędzi w czasie operacji ma kluczowe znaczenie dla późniejszej rekonwalescencji, a przede wszystkim - dalekosiężnych wyników leczenia, gdyż jakiekolwiek błędy mogą prowadzić do patologicznego przerostu tkanki kostnej, obluzowania sztucznego stawu, jego przemieszczenia czy nawet groźnych w skutkach złamań bądź uszkodzeń nerwów obwodowych.

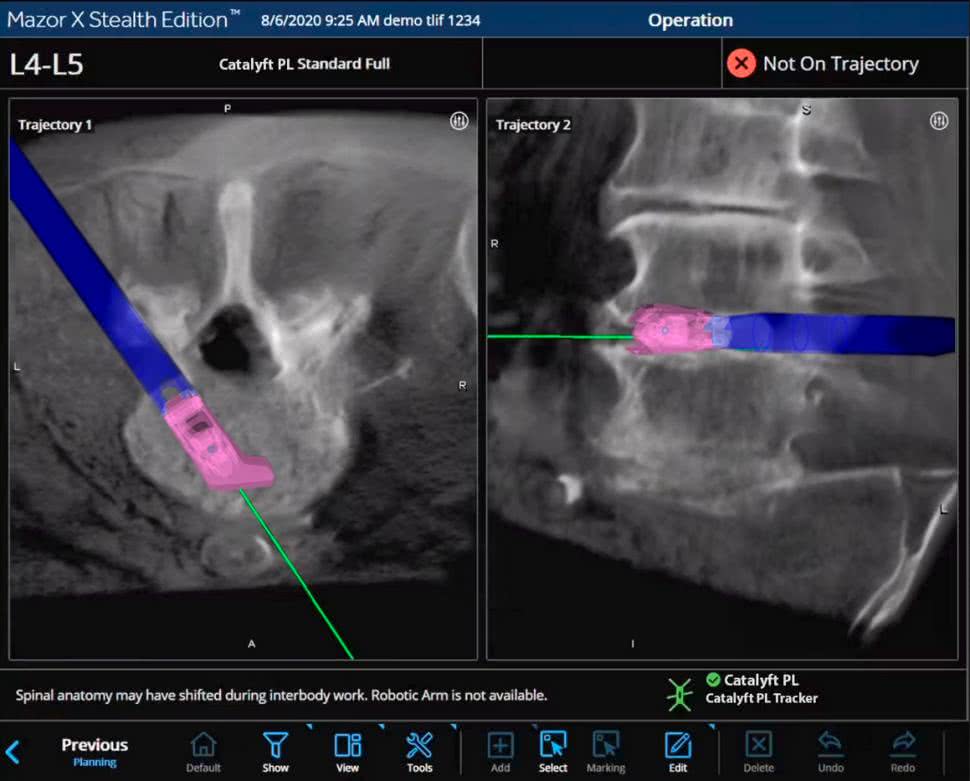
Jeszcze większe wymagania stawia ortopedom chirurgia kręgosłupa, w szczególności procedury wprowadzania śrub w poszczególne kręgi. Nietrudno domyślić się, jak krytyczne znaczenie ma całkowite bezpieczeństwo pacjenta oraz niezawodność wyposażenia, np. podczas wprowadzania wiertła w kość, tuż obok przebiegającego w kanale kręgowym rdzenia. Jakiekolwiek niepożądane przesunięcie narzędzia mogłoby wszak zakończyć się dla pacjenta tragicznie. Dlatego też do powszechnej praktyki klinicznej weszły bardzo zaawansowane systemy robotyczne, które oprócz stabilnego (pod względem mechaniki oraz sterowania) manipulatora zawierają także rozbudowany system wizyjny, pozwalający na niezwykle precyzyjne pozycjonowanie zarówno ciała pacjenta, jak i ramienia robotycznego w przestrzeni trójwymiarowej. W tym celu stosuje się dokładne skanery 3D oraz specjalne znaczniki optyczne - przykład takiego rozwiązania, system Mazor marki Medtronic, można zobaczyć na fotografii 18.

Dokładne ustawienie tulei prowadzącej umożliwia pewne wprowadzenie narzędzia (np. wiertarki - fotografia 19).

Dodatkową zaletą stosowania zaawansowanych systemów pozycjonowania wizyjnego jest także możliwość wspomagania tych części zabiegu, które są wykonywane w całości ręcznie przez chirurga - znaczniki optyczne zamontowane na narzędziu (fotografia 20) pozwalają na śledzenie orientacji końcówki roboczej w w czasie rzeczywistym, w sposób bodaj najbardziej intuicyjny, bo bazujący na nałożeniu odpowiedniej wizualizacji na obraz tomograficzny (rysunek 2).

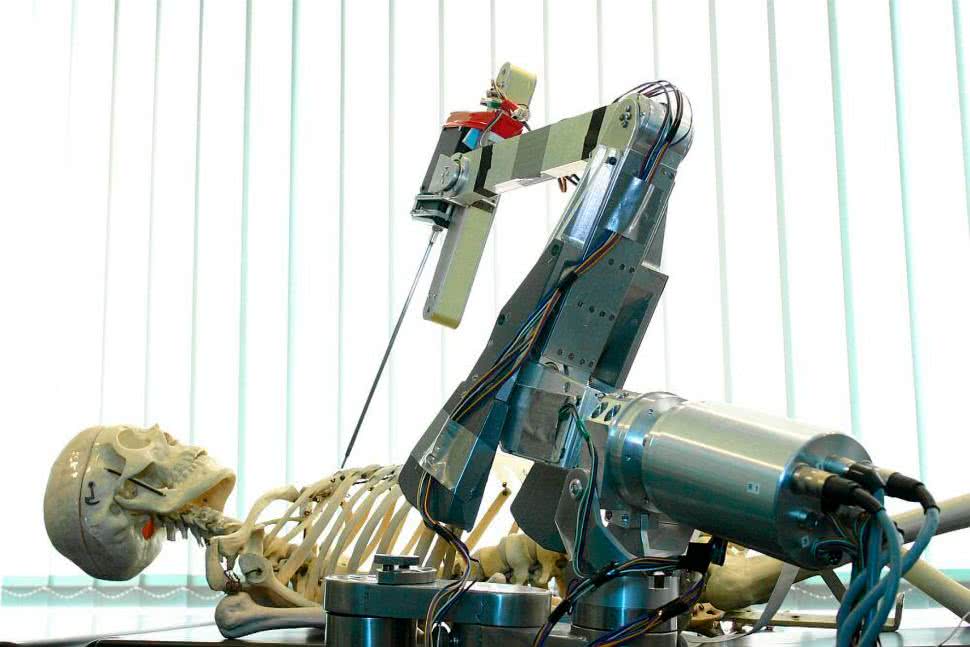
Taka technologia bywa określana mianem chirurgii wspomaganej obrazowo (ang. Image Guided Surgery). Warto dodać, że w nurcie rozwoju robotów pozycjonujących (na potrzeby neurochirurgii i ortopedii) powstała swego czasu jedna z bodaj najciekawszych koncepcji - miniaturowy robot, mieszczący się na dłoni i mocowany bezpośrednio do struktur kostnych pacjenta. Co ciekawe, robot MARS (fotografia 21) został zaprojektowany tak, by… w całości mógł być poddawany sterylizacji (!) To technologiczne "cacko" powstało przeszło 20 lat temu i do dziś pozostaje jednym z najbardziej kompaktowych robotów chirurgicznych, jakie kiedykolwiek zbudowano.

Roboty neurochirurgiczne
Sens stosowania robotów w neurochirurgii oraz ortopedii zdaje się w dużym stopniu zazębiać. Choć niewątpliwie mikrochirurgia ośrodkowego układu nerwowego (przede wszystkim mózgowia) wymaga diametralnie innych narzędzi niż "twarda" chirurgia ortopedyczna, to w obydwu przypadkach kluczowe znaczenie ma niezwykle dokładne pozycjonowanie narzędzi, rzecz jasna w odniesieniu do danych obrazowych. W przypadku neurochirurgii są to najczęściej dane z rezonansu magnetycznego (MRI), a w najbardziej zaawansowanych systemach możliwe jest zastosowanie robota wspieranego obrazowaniem śródoperacyjnym - chirurg otrzymuje zatem aktualne informacje o położeniu narzędzi i zmianach dokonywanych w anatomii operowanych tkanek niemal w czasie rzeczywistym (co rzecz jasna - ze względów ochrony radiologicznej - nie byłoby możliwe do wykonania przy zastosowaniu tomografii komputerowej, choć i ta bywa używana w salach hybrydowych, oczywiście w znacznie węższym zakresie). W gantrze skanera MR możliwe jest jednak ustawienie tylko i wyłącznie takiego robota, który został od początku do końca zaprojektowany do pracy w silnym polu magnetycznym - nietrudno domyślić się, jak wielkie jest to utrudnienie zarówno dla elektroników, jak i mechaników, opracowujących konstrukcję maszyny.
Robot neuroArm to doskonały przykład mechatronicznego systemu neurochirurgicznego, stosowanego do rozmaitych operacji mózgu. Urządzenie składa się z wózka z dwoma manipulatorami (fotografia 22) oraz systemem wizyjnym (kamerą mikroskopową), a także konsoli sterującej z manetkami, nieco zbliżonymi konstrukcyjnie do tych, które zaprezentowaliśmy już przy okazji robotów laparoskopowych. Co ciekawe, robot zawiera czujniki siły, dające chirurgowi bezcenne sprzężenie haptyczne - szczególnie istotne podczas operacji na tkankach miękkich, w dodatku należących do tak złożonego i krytycznie ważnego organu, jakim jest mózg.

System ROSA (fotografia 23) powstał w celu wspomagania implantacji elektrod do głębokiej stymulacji mózgu (DBS), a także rozmaitych innych procedur na tym narządzie. Zastosowanie stereotaktycznego pozycjonowania narzędzia pozwala na znaczne skrócenie czasu trwania zabiegu (w niektórych przypadkach nawet o 80%!), co rzecz jasna zmniejsza obciążenie anestezjologiczne pacjenta. Mało tego - w przypadku operacji pediatrycznych dodatkową zaletą jest brak konieczności pełnego golenia skóry głowy dziecka, gdyż cały zabieg odbywa się w sposób minimalnie inwazyjny. System może być używany także do tak złożonych procedur, jak biopsja mózgu, neuroendoskopia przeznosowa czy też endoskopowe zabiegi, prowadzone na trzeciej komorze mózgu.

Roboty do zabiegów endowaskularnych
Postęp w dziedzinie robotyki medycznej nie ominął także małoinwazyjnych procedur przeznaczyniowych. Choć w tym przypadku zróżnicowanie wykonywanych przez operatora ruchów jest mocno ograniczone względem operacji laparoskopowych czy też neurochirurgicznych (są to głównie obroty oraz przesuw cewnika/prowadnika wzdłuż światła naczynia), to także w tym zakresie istnieje dla robotów medycznych spore pole do popisu. O ile pacjenci mogą dzięki mechatronicznym urządzeniom zyskać lepszą jakość prowadzenia zabiegu (dokładność i powtarzalność ruchów zmniejsza ryzyko powikłań), o tyle bodaj najistotniejszy jest tutaj aspekt… bezpieczeństwa operatora. Jak powszechnie wiadomo pozycjonowanie narzędzi endowaskularnych (wewnątrznaczyniowych) odbywa się z użyciem fluoroskopii, czyli obrazowania rentgenowskiego w czasie rzeczywistym. To zaś oznacza, że operator cały czas musi znajdować się w pobliżu lampy rentgenowskiej (będącej częścią składową tzw. ramienia C), co w oczywisty sposób naraża go na przyjmowanie pewnej dawki promieniowania jonizującego. Choć fluoroskopia korzysta ze stosunkowo niskich dawek, to problem ekspozycji i tak nasila się proporcjonalnie do czasu i liczby wykonywanych procedur.
System Magellan marki Hansen Medical (fotografia 24) powstał właśnie po to, by zredukować powyższy problem do minimum. Głowica robota, w której mocuje się cewnik oraz niezbędne do przeprowadzenia zabiegu akcesoria, może być sterowania zdalnie, z konsoli umieszczonej za szybą ze szkła ołowiowego, skutecznie zatrzymującego większość rozproszonego promieniowania X. W ten sposób ekspozycja na promieniowanie jonizujące spada nawet o 95% względem klasycznych technik wykonywania zabiegów endowaskularnych.

Roboty do zabiegów mikrochirurgii otwartej
Robotyka dotarła także do świata mikrochirurgii otwartej - czyli wszelkiego rodzaju zabiegów, w których chirurg operuje na strukturach o rozmiarach rzędu ułamków milimetra. Do tej grupy zalicza się wiele różnych rodzajów operacji, w tym wszelkie zabiegi rekonstrukcyjne, transplantacyjne i replantacyjne kończyn, czy też niektóre operacje z zakresu angiologii bądź chirurgii plastycznej. Choć najlepsi chirurdzy z powodzeniem radzą sobie z zadaniem zszywania cienkich nerwów bądź naczyń o średnicy zewnętrznej na poziomie 0.5 mm (!), to tak wyszkolonych operatorów jest w skali całego globu stosunkowo niewielu. Zastosowanie mechatronicznego asystenta, który - podobnie jak w przypadku laparoskopii - automatycznie odfiltruje niepożądane drżenie rąk (tremor), pozwala więc na przesunięcie granic wymiarowych preparowanych tkanek jeszcze niżej. Dobrym przykładem może być tutaj robot MUSA-3 marki Microsure (fotografia 25) czy też system MIRA marki Virtual Incision (fotografia 26). Warto dodać, że o ile drugie z wymienionych urządzeń bazuje na specjalnych końcówkach narzędziowych, o tyle MUSA-3 może współpracować z konwencjonalnymi, manualnymi narzędziami mikrochirurgicznymi, co dodatkowo skraca i ułatwia proces treningu operatora, dając mu możliwość korzystania z ulubionych, sprawdzonych instrumentów.


Roboty radioterapeutyczne
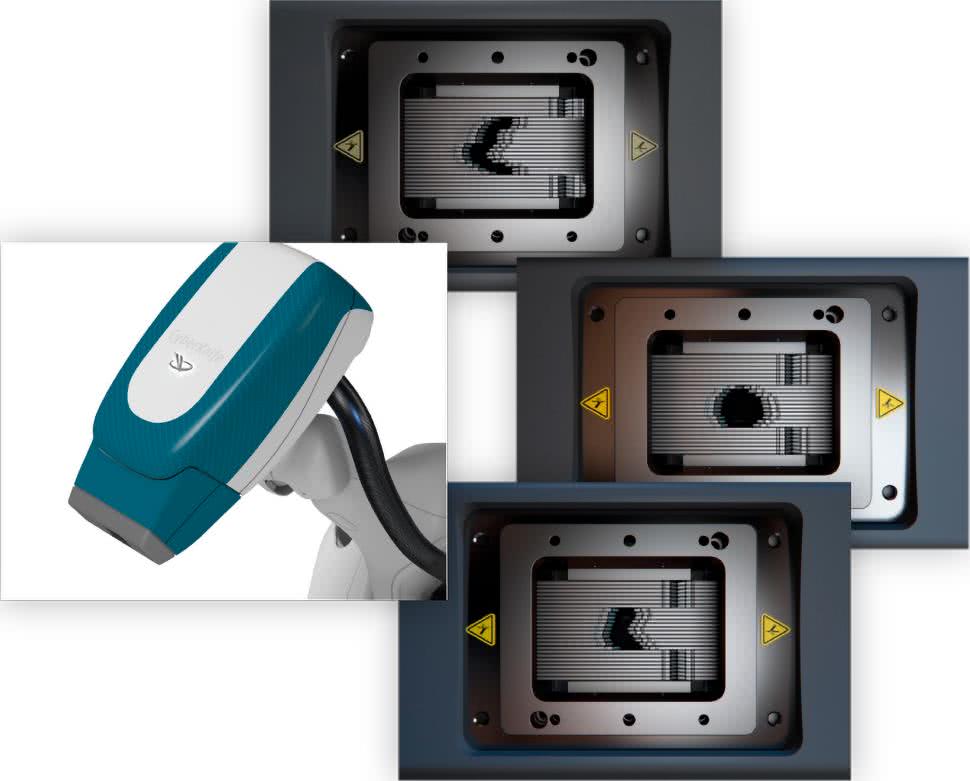
Radioterapia to kolejny obszar współczesnej medycyny, który coraz intensywniej korzysta z robotów. System CyberKnife S7 (fotografia 27) to ultranowoczesna aparatura do naświetlań z użyciem metody stereotaktycznego pozycjonowania pacjenta w celu dostarczenia silnej wiązki promieniowania jonizującego tylko do tego obszaru, w którym jest on niezbędny.

Tak selektywne działanie okazuje się możliwe poprzez przemieszczanie ramienia wokół obszaru anatomicznego poddawanego terapii - jeżeli bowiem ten sam guz (nawet naprawdę niewielki) zostanie poddany działaniu promieniowania z wielu różnych kierunków (rysunek 3), to efekt terapeutyczny skumuluje się dokładnie w punkcie przecięcia wszystkich wiązek, zaś otaczające tkanki "dostaną" tylko niewielką część promieniowania, propagującego na wylot przez ciało pacjenta.

Głowicę robota wyposażono w pełnoprawny kolimator wiązki, stosowany w standardowych aparatach do radioterapii (fotografia 28), a jakby tego było mało - urządzenie jest w stanie samodzielnie wymieniać kolimatory w razie potrzeby, co umożliwia jeszcze lepsze dopasowanie warunków zabiegu do potrzeb danego pacjenta. Ponadto system CyberKnife S7 potrafi automatycznie kompensować ruchomość oddechową, co daje szansę na znacznie precyzyjniejsze dozowanie dawki do narządów w rejonie klatki piersiowej i jamy brzusznej, które w wyniku akcji oddechowej mogą przemieszczać się przy każdym wdechu oraz wydechu.
Roboty rehabilitacyjne
Rehabilitacja jest wręcz wymarzonym obszarem aplikacyjnym dla robotów - wymaga bowiem wielokrotnego, żmudnego powtarzania tych samych lub delikatnie modyfikowanych (w miarę postępów terapii) ruchów na danej kończynie lub tułowiu pacjenta. Nic więc dziwnego, że roboty rehabilitacyjne powoli zdobywają popularność w tej dziedzinie medycyny, czego doskonałym przykładem może być manipulator LBR Med marki KUKA - potentata na rynku precyzyjnych robotów przemysłowych. Urządzenie należałoby raczej zakwalifikować do grupy cobotów, czyli robotów współpracujących - LBR Med został bowiem specjalnie zaprojektowany do celów bezpośredniej kooperacji z człowiekiem (operatorem). Dołożenie efektora w postaci odpowiedniego uchwytu dla rehabilitowanej kończyny (fotografia 29) pozwala na jej bezpieczne, powtarzalne pozycjonowanie, bez konieczności wykonywania tych zadań przez fizjoterapeutę, zaś proces programowania trajektorii polega na "nauczeniu" robota odpowiednich ruchów poprzez intuicyjne, manualne prowadzenie mechatronicznego ramienia.

Roboty kosmetologiczne
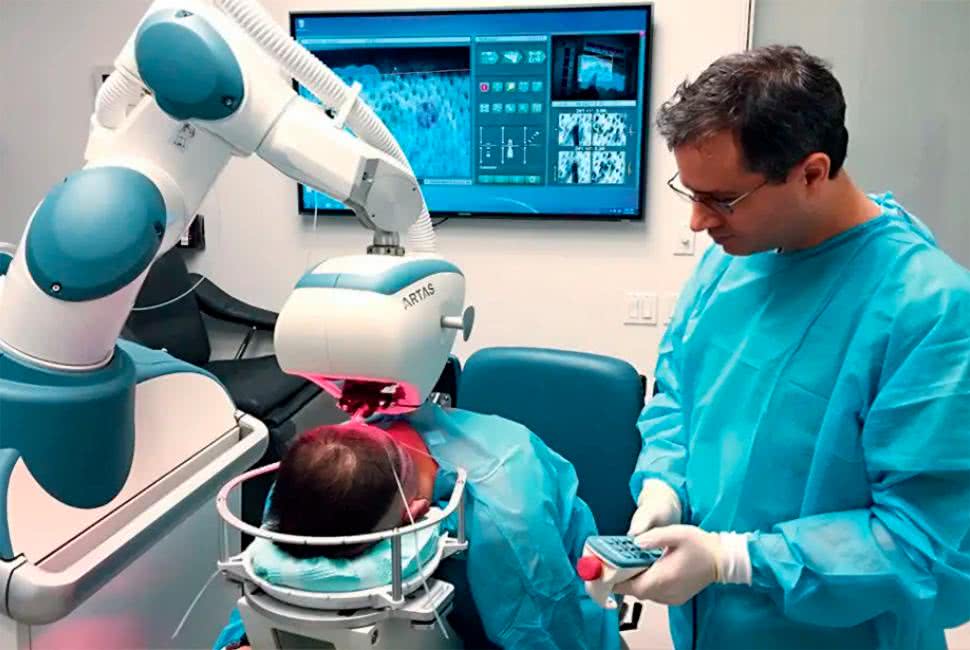
Na koniec niniejszego materiału pozostawiliśmy interesujące rozwiązanie, które wprawdzie nie dotyczy krytycznych obszarów medycyny, ale dla tysięcy osób stanowi nadzieję na poprawę jakości życia. Mowa o robocie Artas, przeznaczonym do… prowadzenia zabiegów przeszczepu włosów. Tego typu procedury są niezwykle żmudne, wymagają bowiem wykonywania powtarzalnych, bardzo precyzyjnych ruchów w liczbie od kilkuset do nawet kilku tysięcy. Robot Artas (fotografia 30) znacząco ułatwia realizację tego typu transplantacji i wyraźnie skraca czas, dzielący pobranie włosów od wszczepienia ich na docelowe miejsce na skórze głowy pacjenta. Co ważne, zastosowanie precyzyjnie sterowanego manipulatora o wielu stopniach swobody umożliwia uzyskanie odpowiednich kątów pobierania oraz implantacji, co pozytywnie wpływa na powodzenie całego przedsięwzięcia.
Podsumowanie
W artykule przedstawiliśmy przekrój współczesnego rynku robotów medycznych. Ta niezwykle interesująca dziedzina techniki, rozwijająca się od kilkudziesięciu lat na styku medycyny zabiegowej oraz mechatroniki, imponuje dziś możliwościami, które dalece wykraczają poza fizyczne możliwości nawet najlepszych chirurgów w zakresie powtarzalności i precyzji ruchów. A jednak nic nie wskazuje na to, by w najbliższych latach jakikolwiek robot był w stanie samodzielnie wykonać nawet najprostszą operację. Zamiast tego inżynierowie w wielu krajach świata w pocie czoła pracują nad chociażby częściową automatyzacją niektórych elementów zabiegu - np. nad implementacją półautomatycznych lub w pełni automatycznych gestów szycia. Wymaga to jednak ścisłej współpracy mechatronicznych manipulatorów z systemami wizyjnymi, a nade wszystko - zaawansowanymi algorytmami sztucznej inteligencji, zdolnymi do poradzenia sobie z odtworzeniem sekwencji ruchów (związanych z wkłuwaniem, przesuwaniem oraz wyciąganiem igły z nicią chirurgiczną), która dla nawet najbardziej początkującego adepta chirurgii jest rutynową czynnością, przy odrobinie praktyki niewymagającą nawet głębszego zastanowienia. Po raz kolejny okazuje się zatem, że nawet najbardziej wyrafinowane systemy automatyczne są wciąż tylko narzędziem w rękach ludzi. Może to i lepiej?
inż. Przemysław Musz, EP












