 Zaloguj
Zaloguj




W dzisiejszych czasach systemy globalnej nawigacji satelitarnej (GNSS) stanowią kluczowy element naszego codziennego życia, zapewniając precyzyjne i dokładne informacje o pozycji, prędkości i czasie na całym świecie. Jednak, nawet w przypadku zaawansowanych technologicznie systemów GNSS, tematy określania i maksymalizacji precyzji i dokładności pozostają nadal istotne dla inżynierów elektroników oraz specjalistów z dziedziny nawigacji i geodezji.
W artykule skupimy się na zrozumieniu kluczowych pojęć takich jak Dokładność (Accuracy) i Precyzja (Precision) w kontekście systemów GNSS. Będziemy analizować, jak te dwa parametry odnoszą się do jakości pozycjonowania przy użyciu satelitarnych sygnałów nawigacyjnych, zwracając uwagę na ważne terminy takie jak VDOP (Vertical Dilution Of Precision), HDOP (Horizontal Dilution Of Precision), które odzwierciedlają błędy pozycjonowania w trzech wymiarach.
DOP – Dilution Of Precision jest szczególnie istotne dla dokładności pozycjonowania w systemach nawigacyjnych, również tych satelitarnych. W dalszej części artykułu sprawdzimy, jak różne czynniki, takie jak geometria satelitów, wpływają na DOP i jakie konsekwencje może to mieć dla ostatecznej precyzji pozycjonowania. W artykule omówimy nie tylko teoretyczne aspekty precyzji i dokładności w systemach GNSS, ale także zbadamy praktyczne metody redukcji Dilution Of Precision w rzeczywistych zastosowaniach. Przyjrzymy się różnym technikom i strategiom, które inżynierowie mogą zastosować, aby zminimalizować wpływ DOP na dokładność pozycjonowania w gotowych systemach nawigacyjnych. Wśród przykładów takich metod znajdą się techniki filtrowania danych, optymalizacja wyboru satelitów oraz zastosowanie danych z wielu źródeł nawigacyjnych.
Zapraszam do lektury dalszych sekcji artykułu, aby zgłębić tę fascynującą tematykę – od matematycznych definicji poszczególnych wartości, poprzez praktyczne strategie poprawy dokładności i precyzji w systemach GNSS, które mają kluczowe znaczenie dla dzisiejszych zaawansowanych aplikacji nawigacyjnych, lokalizacyjnych i nie tylko.
Dokładność i precyzja
Zanim przejdziemy do dalszej dyskusji i przyjrzymy się bardziej złożonym parametrom, warto uściślić czym w ogóle jest dokładność i precyzja. Często te dwa słowa używa się niemalże wymiennie w kontekście omawiania pomiarów z użyciem systemów globalnej nawigacji satelitarnej, jednak w rzeczywistości dotyczą one dwóch różnych aspektów pomiaru (nie tylko pomiaru pozycji z użyciem GNSS – to ogólna definicja), odpowiednio, bliskości wartości prawdziwej oraz powtarzalności pomiaru.
W życiu codziennym słowa dokładność i precyzja są również często używane zamiennie. Jednak, jako terminy w metrologii mają one dwie odmienne definicje. To, że pomiar jest dokładny, nie oznacza, że jest precyzyjny, i odwrotnie. Zarówno dokładność, jak i precyzja są kluczowymi aspektami dobrych pomiarów, ale czym dokładnie są te wartości? Spójrzmy na ich definicje i różnice, które z nich wynikają.
Jaka jest różnica między dokładnością a precyzją?
Dokładność i precyzja są dwiema formami opisu pomiaru, które określają, jak blisko jest on trafienia w cel. Dokładność ocenia, jak blisko wartość pomiaru jest prawdziwej wartości mierzonej zmiennej, podczas gdy precyzja pokazuje, jak blisko siebie są poszczególne wartości pomiarów.
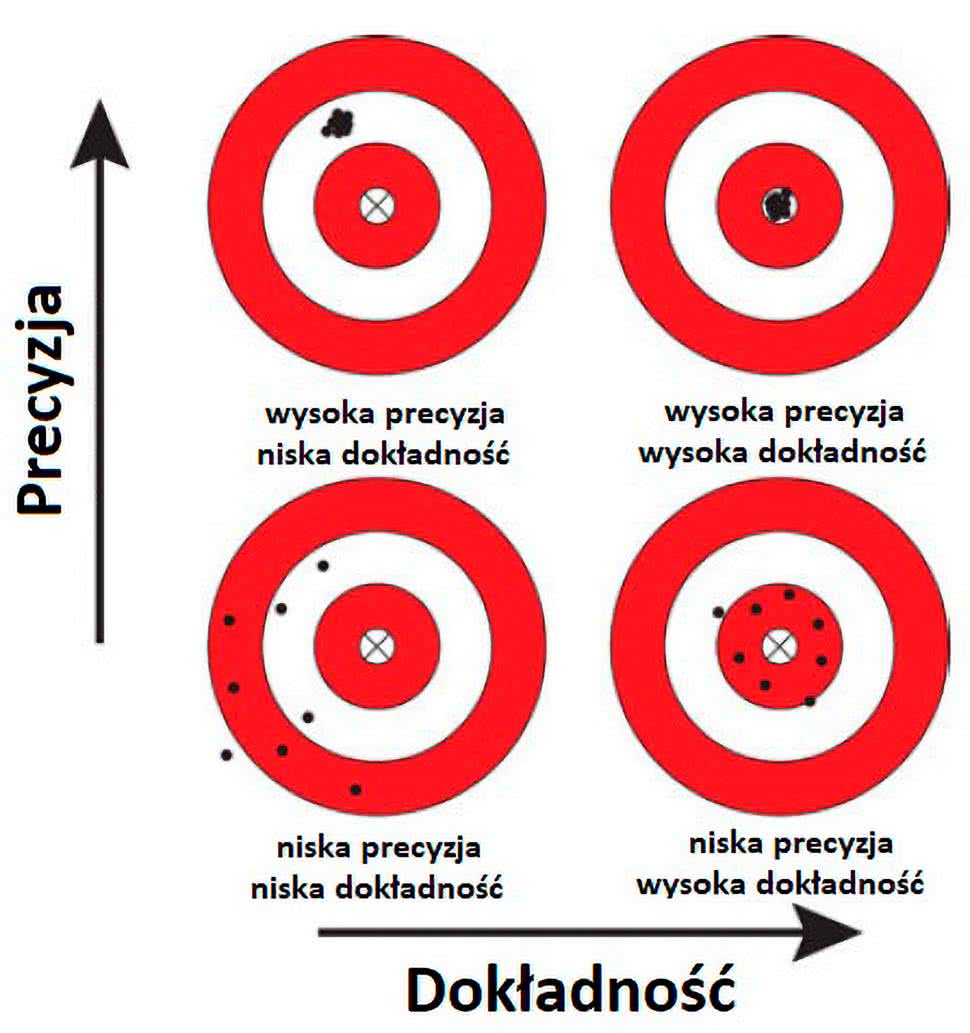
Przykład z tarczą jest najczęstszym sposobem na pokazanie różnicy między dokładnością a precyzją. Rozważmy strzelanie do tarczy albo rzucanie lotkami. Celem jest oczywiście osiągnięcie zarówno wysokiej dokładności, jak i precyzji. Innymi słowy, trafiania w centrum tarczy jak najczęściej.
Jeśli nasze strzały były dokładne, oznacza to, że trafienia były blisko środka tarczy, ale generalnie to lądowały na całej jej powierzchni. Jeśli strzały były z kolei precyzyjne, to oznacza, że punkty trafienia znajdują się blisko siebie, ale niekoniecznie blisko środka tarczy. Zobrazowane jest to na rysunku 1, korzystającym z analogii tarczy strzeleckiej. Dopiero, kiedy strzały są dokładne i precyzyjne, to będą znajdować się w większości w środku tarczy, jak widać na rysunku 1. Aspekty te mają również istotne znaczenie w przypadku nie tylko strzelania do tarczy, ale innych pomiarów, w tym także pomiaru lokalizacji z użyciem GNSS. Oczywiście, mają one również definicje bardziej ścisłe i ujęcie nie jakościowe, a ilościowe.
Czym jest dokładność?
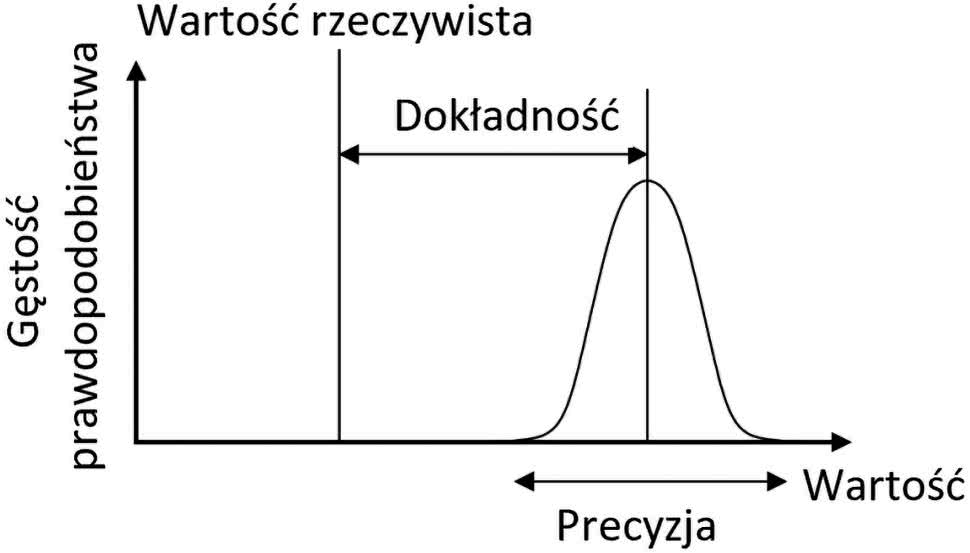
Dokładność wskazuje, jak blisko rzeczywistej wartości jest uzyskany w pomiarze wynik. Jest miarą poprawności pomiaru. Matematycznie mówiąc, miarą dokładności jest odległość pomiędzy wartością oczekiwaną pomiaru (np. wartością średnią), a wartością rzeczywistą, jak pokazano na rysunku 2. Oczywiście w realnym przypadku nie znamy wartości rzeczywistej, jednak oszacowanie jej położenia jest możliwe dzięki danym statystycznym.
W przypadku systemów nawigacyjnych dokładność określana jest za pomocą DOP – Dilution Of Precision (rozmycie dokładności), które wyznaczane jest geometrycznie, jak opisano w dalszej części artykułu.
Czym jest precyzja?
Precyzja mierzy, jak bliskie siebie są pomiary. Pokazano to na rysunku 2. Miarą precyzji może być np. odchylenie standardowe pomiarów. Odchylenie standardowe jest pierwiastkiem kwadratowym z wariancji. Oblicza się ją dla wielu pomiarów. Wariancja jest miarą zmienności danych i wynika z błędów losowych, popełnianych przez nasze urządzenia pomiarowe oraz rozkładu mierzonej zmiennej.
Normy
Znaczenia tych terminów zostały ściśle określone wraz z opublikowaniem norm z serii ISO 5725 w 1994 roku, co znalazło również odzwierciedlenie w wydaniu Międzynarodowego Słownika Metrologicznego (VIM) BIPM (Międzynarodowe Biuro Miar i Wag) z 2008 roku, w punktach 2.13 i 2.14. Zgodnie z ISO 5725-1, ogólny termin „dokładność” jest używany do opisania zbliżenia pomiaru do rzeczywistej wartości. Kiedy termin jest stosowany do zestawów pomiarów tego samego obiektu mierzalnego, obejmuje składnik błędu losowego oraz składnik błędu systematycznego. W tym przypadku trafność oznacza zbliżenie średniej wyników pomiaru do wartości rzeczywistej (prawdziwej), a precyzja oznacza zbliżenie uzgodnienia między zestawem wyników.
ISO 5725-1 i VIM unikają również użycia terminu obciążenie (bias), wcześniej określonego w normie BS 5497-1, ponieważ ma on różne konotacje poza dziedzinami nauki i inżynierii, na przykład w medycynie, prawie czy systemach sztucznej inteligencji.
Dilution of precision
Termin Dilution Of Precision (DOP) to parametr opisujący wpływ geometrii konstelacji satelitów na wyznaczenie pozycji w systemie nawigacji satelitarnej. Koncepcja DOP wywodzi się od użytkowników systemu nawigacji Loran-C. Idea geometrycznego wyznaczania DOP polega na określeniu, w jaki sposób błędy w pomiarze wpłyną na ostateczne oszacowanie stanu. Można to zdefiniować jako:

Koncepcyjnie oznacza to, że błędy w pomiarze skutkują zmianą Δ (zmierzonych
danych). Dla idealnego systemu o niskim DOP niewielkie zmiany w danych pomiarowych nie powinny prowadzić do dużych zmian w wynikowym położeniu. Przeciwnością tej sytuacji jest rozwiązanie bardzo wrażliwe na błędy pomiarowe. Interpretacja geometryczna (dla przykładu 2D) jest pokazana na rysunku 3, gdzie pokazano dwa możliwe scenariusze z akceptowalnym i słabym DOP.
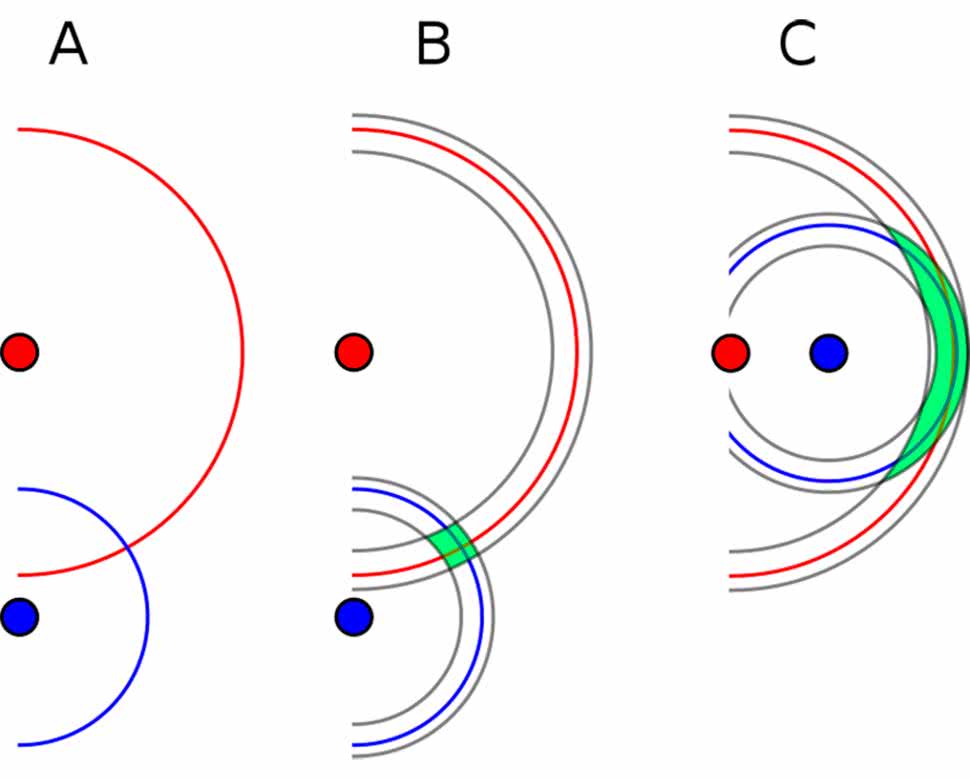
W systemie nawigacji satelitarnej, to co jest de facto mierzone, to odległość od satelitów nawigacyjnych. Na przecięciu się okręgów o promieniu równym zmierzonej odległości znajduje się odbiornik GNSS. Na rysunku 3a pokazano idealny przypadek, tj, gdy pomiary obu odległości nie są obarczone błędem.
Wtedy wynikiem pomiaru pozycji jest punkt – miejsce przecięcia okręgów o promieniu równym odległości pomiędzy satelitą, a odbiornikiem (w rzeczywistości są to dwa punkty, jednak tylko jeden z nich leży w sensownym miejscu, np. na powierzchni Ziemi, drugi znajduje się np. w przestrzeni kosmicznej, co pozwala na jego łatwe odrzucenie.
Niestety w rzeczywistości nie jest tak łatwo – wszystkie pomiary obarczone są pewnym błędem, także pomiary odległości, jak pokazano na rysunkach 3b i 3c. Na tej wizualizacji widać, że w momencie, gdy pomiary odległości obarczone są błędem, punkt przecięcia (punkt gdzie znajduje się odbiornik) ulega rozmyciu (obszar zakolorowany na zielono na rysunku 3). Ten sam błąd pomiaru odległości przekładać może się na różny błąd pozycjonowania, zależnie od wzajemnego położenia satelitów względem siebie i względem pozycji odbiornika – o tym właśnie mówi DOP. Na rysunku 3b system wykazuje niski DOP, a na rysunku 3c DOP jest wysoki – mimo takich samych błędów pomiaru odległości od satelitów.
Z uwagi na względną geometrię dowolnego danego satelity względem odbiornika, precyzja pseudoodległości satelity przekłada się na odpowiadającą jej składową w każdym z czterech wymiarów pozycji mierzonych przez odbiornik (tj. x, y, z i t). Precyzja wielu satelitów widocznych z odbiornika łączy się zgodnie z położeniem względnym satelitów, aby określić poziom precyzji w każdej składowej pomiaru odbiornika. Gdy widoczne satelity nawigacyjne są blisko siebie na niebie (kąty pomiędzy nimi są niewielkie), geometria jest słaba, a wartość DOP wysoka. Gdy kąt pomiędzy satelitami jest duży, geometria sprzyja uzyskaniu niskiego DOP.
Przyjrzyjmy się dwóm nachodzącym na siebie okręgom różnych środkach, jakie pokazano na rysunku 3. Jeśli nachodzą na siebie pod kątem prostym, największy zakres nachodzenia jest znacznie mniejszy niż w przypadku nachodzenia prawie równoległego. Niska wartość DOP reprezentuje lepszą precyzję pozycji dzięki szerszemu kątowemu rozdzieleniu między satelitami używanymi do obliczania pozycji jednostki. Inne czynniki, które mogą efektywnie zwiększyć DOP, to przeszkody takie jak pobliskie góry lub budynki, które ograniczają widoczność satelitów.
Rozróżniamy następujące rodzaje DOP:
- GDOP – parametr geometryczny opisujący dokładność położenia punktu w 4 wymiarach (3 wymiary przestrzenne + czas),
- HDOP – horyzontalny DOP – dla współrzędnych płaskich,
- VDOP – wertykalny DOP – dla wysokości,
- TDOP – DOP dla pomiaru czasu,
- PDOP – DOP pozycji w trzech wymiarach; współczynnik opisujący stosunek między błędem pozycji użytkownika a błędem pozycji satelity.
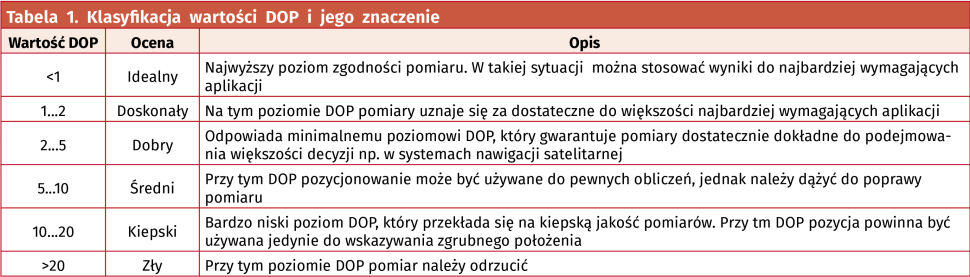
Parametry DOP podawane są przez odbiornik. Nie musimy ich wyznaczać, ale należy sprawdzać je, gdy prowadzimy pomiary z pomocą GNSS. W tabeli 1 zawarto podsumowanie różnych przedziałów DOP wraz z informacjami, jak na danym poziomie DOP należy traktować pomiar.
Poprawa parametru DOP
Istnieje kilka strategii, które można zastosować, w celu minimalizacji DOP w zastosowaniach GNSS.
Optymalny wybór satelitów
Jednym ze sposobów minimalizacji DOP jest optymalny wybór satelitów. Poprzez staranne wybieranie, które satelity mają być używane do pozycjonowania, można zredukować błąd wprowadzany przez słabą geometrię satelitów. Wymaga to dobierania satelitów, które są równomiernie rozmieszczone na niebie, mają dobre kąty elewacji oraz szeroki rozkład kątów pomiędzy nimi. Dzięki temu DOP może zostać zmniejszony, a dokładność pomiaru poprawiona.
Zwiększenie widoczności satelitów
Innym sposobem minimalizacji DOP jest zwiększenie liczby obserwowalnych satelitów. Można to uzyskać poprzez zwiększenie zysku anteny, dzięki czemu będzie ona w stanie odbierać słabsze sygnały lub poprawę jej pozycjonowania czy orientacji, tak aby więcej satelitów było widocznych dla anteny odbiornika. Dodatkowo, wiele odbiorników GNSS może śledzić wiele konstelacji satelitarnych naraz, (takich jak GPS, GLONASS, Galileo czy BeiDou). Zapewnienie, że odbiornik śledzi jak najwięcej satelitów, może zredukować DOP.
Maska kąta elewacji
Kąt maski elewacji to minimalny kąt elewacji nad horyzontem, jaki musi mieć satelita, aby być brany pod uwagę przy pozycjonowaniu. Poprzez ustawienie niższego kąta maski elewacji, będzie dostępnych więcej satelitów do śledzenia, co może prowadzić do zmniejszenia DOP. Jednak ważne jest, aby mieć świadomość tego, że zbyt niskie ustawienie kąta maski elewacji może wprowadzić więcej zakłóceń sygnału, co może pogorszyć ogólną dokładność pozycjonowania. Dodatkowo, jeżeli nasz odbiornik umiejscowiony jest relatywnie nisko, wiele satelitów o niskiej elewacji może być zasłaniana lub częściowo przysłaniana przez drzewa czy pobliskie budynki, co utrudniać będzie uzyskanie dobrej jakości sygnału z tych satelitów.
Położenie odbiornika i środowisko
Fizyczne umieszczenie odbiornika oraz otoczenie mogą również wpływać na DOP. Unikanie przeszkód takich jak wysokie budynki, góry czy gęste korony drzew może poprawić widoczność satelitów i zredukować DOP. Zaleca się umieszczenie odbiornika na otwartej przestrzeni z wolnym widokiem na niebo.
Uśrednianie wielu pomiarów
Uśrednianie wielu pomiarów pozycji w czasie może pomóc w redukcji szumu pomiarowego i poprawić dokładność oszacowań pozycji. Techniki filtracji, takie jak filtr Kalmana, mogą również być zastosowane w celu poprawy dokładności oszacowań poprzez uwzględnienie czasowej korelacji pomiarów.
Podsumowanie
Podstawową miarą dokładności systemów nawigacji satelitarnej są parametry DOP. Są one obliczane i podawane przez moduły odbiorników GNSS, należy jednak uwzględniać je przy implementacji takich parametrów. W powyższym artykule opisano czym jest w metrologii dokładność i precyzja, a także jak definiowany jest parametr DOP w nawigacji.
Konieczne jest utrzymanie DOP na odpowiednim poziomie. Im niższy DOP, tym precyzyjniejsze są pomiary. DOP powyżej 20 oznacza, że uzyskane pomiary są zupełnie bezwartościowe. Dla uzyskania pomiarów zdatnych do wykorzystania w większości aplikacji DOP powinien być mniejszy niż 5, a w przypadku najbardziej wymagających zastosowań poniżej 2.
Jakkolwiek DOP wynika z geometrii znajdujących się w kosmosie konstelacji satelitów, istnieje wiele sposobów na poprawę DOP działaniami na ziemi. Krytyczne jest tutaj zastosowanie czułych anten (o wysokim zysku) które będą miały dobrą widoczność nieba – nie zasłonięte przeszkodami terenowymi, drzewami czy budynkami. Dodatkowo w uzyskaniu lepszego DOP pomocne jest zastosowanie różnych konstelacji satelitów – oprócz GPS dołączyć można satelity np. z konstelacji Galileo czy BeiDou, w zależności od tego, które w danym momencie zapewniają lepszy sygnał.
Nikodem Czechowski, EP
Bibliografia:
- https://en.wikipedia.org/
- https://gisgeography.com/
- Richard B. Langley „Dilution of Precision” GPS World, maj 1999
- M. Tahsin, S. Sultana, T. Reza and M. Hossam-E-Haider „Analysis of DOP and its preciseness in GNSS position estimation” 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Savar, Bangladesh, 2015












