 Zaloguj
Zaloguj



Rynek aktywnych implantów – choć obejmuje wyroby o znaczeniu kluczowym dla współczesnej terapii i diagnostyki – bardzo wolno rozszerza się o nowe rodzaje produktów. Wynika to z szeregu czynników, związanych zarówno z ograniczonym zapotrzebowaniem rynkowym w tym zakresie, jak i z wyśrubowanymi wymogami formalnymi (certyfikacja, dopuszczenie do użytku, badania kliniczne), limitami technicznymi (moc i pojemność zasilania, objętość obudowy, wymogi szczelności), etc. Dobrym przykładem będą tutaj sztuczne serca – choć ich początki sięgają kilku dekad wstecz (zainteresowanym fascynującą historią techniki urządzeń wszczepialnych polecamy artykuł Historia rozwoju elektroniki implantowalnej w tym numerze "Elektroniki Praktycznej"), to z wielu względów okazało się, że często znacznie lepszym rozwiązaniem jest albo zastosowanie prostszych (i tańszych) urządzeń do tymczasowego wspomagania lewej komory serca, albo możliwie szybkie wykonanie klasycznej transplantacji biologicznego organu. Rynek bezlitośnie weryfikuje początkowe założenia – niektóre technologie (np. rozruszniki serca czy też implantowalne kardiowertery-defibrylatory) z powodzeniem przeżywają próbę czasu, podczas gdy inne stopniowo zanikają we mgle technologicznej historii.
Z powyższych względów zdecydowaliśmy się omówić zagadnienia konstrukcyjne i projektowe implantów aktywnych na przykładzie dwóch zazębiających się pod wieloma względami grup urządzeń: rozruszników serca (kardiostymulatorów) oraz implantowalnych kardiowerterów-defibrylatorów (ICD). Znaczną część podanych w artykule informacji można jednak ekstrapolować na inne grupy urządzeń, zwłaszcza rozmaitych neurostymulatorów – te same warunki panujące wewnątrz ciała ludzkiego, wymuszają bowiem stosowanie sprawdzonych rozwiązań m.in. w zakresie doboru materiałów, źródeł zasilania, sposobów produkcji obudowy i złączy elektrod, etc.
Podstawowe informacje o układzie bodźcotwórczo-przewodzącym serca
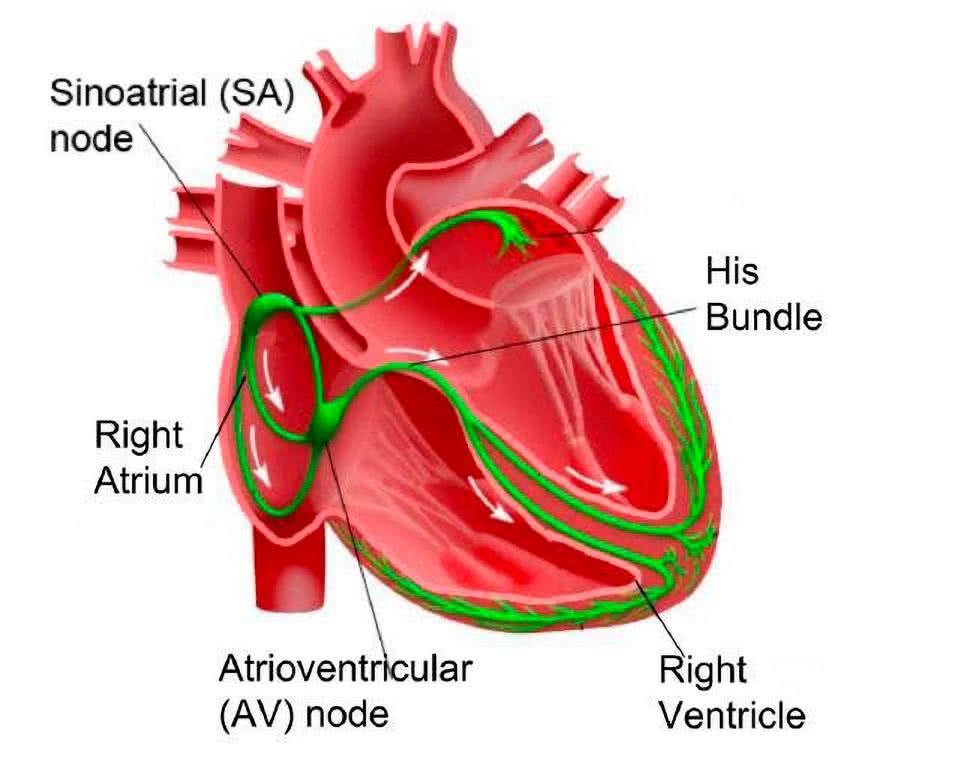
W zdrowym sercu tempo i kolejność kurczenia się przedsionków oraz komór są nadawane przez tzw. układ bodźcotwórczo-przewodzący, będący grupą wyspecjalizowanych kardiomiocytów (komórek mięśnia sercowego). Źródłem rytmicznych pobudzeń o częstotliwości regulowanej w pewnym zakresie przez inne, pozasercowe czynniki (autonomiczny układ nerwowy oraz hormony) jest tzw. węzeł zatokowo-przedsionkowy, a taki „zdrowy”, naturalny, rytm jest z tegoż powodu nazywany rytmem zatokowym. Układ bodźcotwórczo-przewodzący można wyobrazić sobie jako swego rodzaju „wewnętrzne okablowanie” mięśnia sercowego (rysunek 1), które jednak nie tylko przewodzi impulsy elektryczne wywołujące skurcze, ale także opóźnia je, przy czym czasy propagacji w poszczególnych odcinkach znacząco się różnią, dzięki czemu akcja serca może być hemodynamicznie skuteczna (tj. odpowiednia ilość krwi, spływającej pod niskim ciśnieniem do przedsionków, jest następnie pompowana do płuc oraz aorty).
Tryby pracy rozruszników
Na rodzaj zaburzeń rytmu serca ma wpływ szereg czynników – niektóre z nich są powiązane z nieprawidłowościami funkcjonowania samego węzła zatokowo-przedsionkowego, inne zaś wynikają z zakłóconego przewodzenia w dalszych częściach układu bodźcotwórczo-przewodzącego (np. w wyniku częściowej martwicy w obrębie blizny pozawałowej). Zaburzenia te w wielu przypadkach wymagają korekcji poprzez narzucenie rytmu za pomocą sztucznego rozrusznika lub jedynie wspomaganie lub koordynację naturalnych pobudzeń tylko wtedy, gdy jest to naprawdę potrzebne.
Z powyższego opisu wynika kilka istotnych założeń koncepcyjnych w kwestii budowy i funkcjonowania rozrusznika:
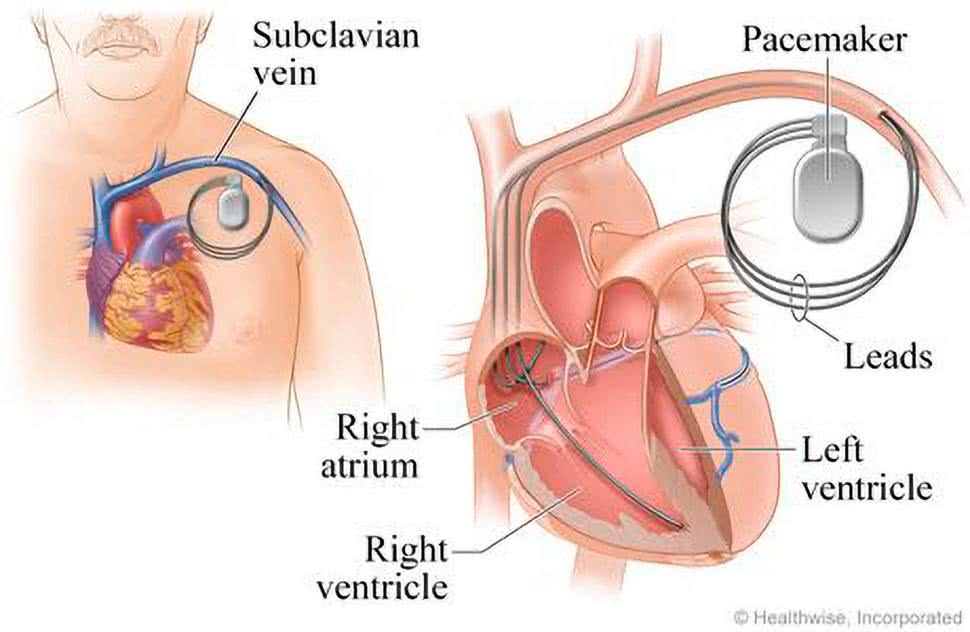
- Miejsce stymulacji – w zależności od tego, na jakim etapie układu bodźcotwórczo-przewodzącego występuje anomalia, niezbędne może być stymulowanie na poziomie obydwu prawych jam serca, prawej komory lub (obecnie znacznie rzadziej) tylko prawego przedsionka. Stąd też pojawia się konieczność zastosowania jednego lub dwóch kanałów wyjściowych, choć w przypadku tzw. terapii resynchronizującej serca liczba kanałów zwiększa się do trzech – patrz rysunek 2 (więcej informacji na ten temat podamy w dalszej części artykułu).
- Tryb stymulacji – pierwsze rozruszniki miały postać prostych, jednokanałowych (dziś nazwalibyśmy je jednojamowymi) stymulatorów o stałej częstotliwości wyjściowej i działały całkowicie asynchronicznie względem biologicznego rytmu serca. Takie rozwiązanie miało szereg wad i choć pozwalało leczyć niektóre zaburzenia rytmu, generowało także pewne zagrożenia dla pacjenta. Elektrofizjologia serca jest zagadnieniem bardzo złożonym i nieprawidłowe zastosowanie stymulacji (np. wygenerowanie impulsu w określonej części cyklu pracy serca) może zapoczątkować epizod groźnych dla życia pacjenta arytmii komorowych. Takie przypadki miały miejsce po rozpoczęciu stosowania rozruszników pierwszej generacji, stąd już w latach 60. XX w. do użytku wprowadzono urządzenia pracujące w trybie stymulacji „na żądanie” (demand pacing), co sprowadzało się do detekcji spontanicznej aktywności serca, a następnie wyzwalania (lub wstrzymywania) impulsu w zależności od niej. Tak więc do kanałów wyjściowych należało dołożyć także obwody wzmacniaczy, komparatory oraz układy czasowe, które umożliwiały uzależnienie działania generatora od aktualnego etapu cyklu pracy serca.
Opisane powyżej parametry stymulacji mają absolutnie krytyczne znaczenie dla zastosowania urządzenia u konkretnego pacjenta, stąd też w praktyce klinicznej stosuje się międzynarodowy kod NASPE/BPEG Gereric, nazywany w skrócie NBG (North American Society of Pacing and Electrophysiology, Britsh Pacing and Electrophysiology Group). Poszczególne pozycje oznaczenia kodują:
- Miejsce stymulacji (pacing):
- O – brak,
- A – przedsionek (Atrium),
- V – komora (Ventricle),
- D – obie jamy (D = A + V).
- Miejsce detekcji spontanicznej aktywności serca (sensing):
- O – brak,
- A – przedsionek,
- V – komora,
- D – obie jamy (D = A + V).
- Tryb pracy:
- O – brak,
- T – wyzwolenie impulsu stymulującego po detekcji sygnału (Triggered),
- I – hamowanie stymulacji po wykryciu aktywności własnej serca (Inhibited),
- D – praca w obu trybach (tryb „mieszany” w zależności od częstości rytmu spontanicznego).
- Modulacja częstotliwości generatora impulsów:
- O – brak,
- R – zmienna częstotliwość impulsów stymulujących,
- Stymulacja wielopunktowa:
- O – brak,
- A – przedsionek,
- V – komora,
- D – obie jamy (D = A + V).
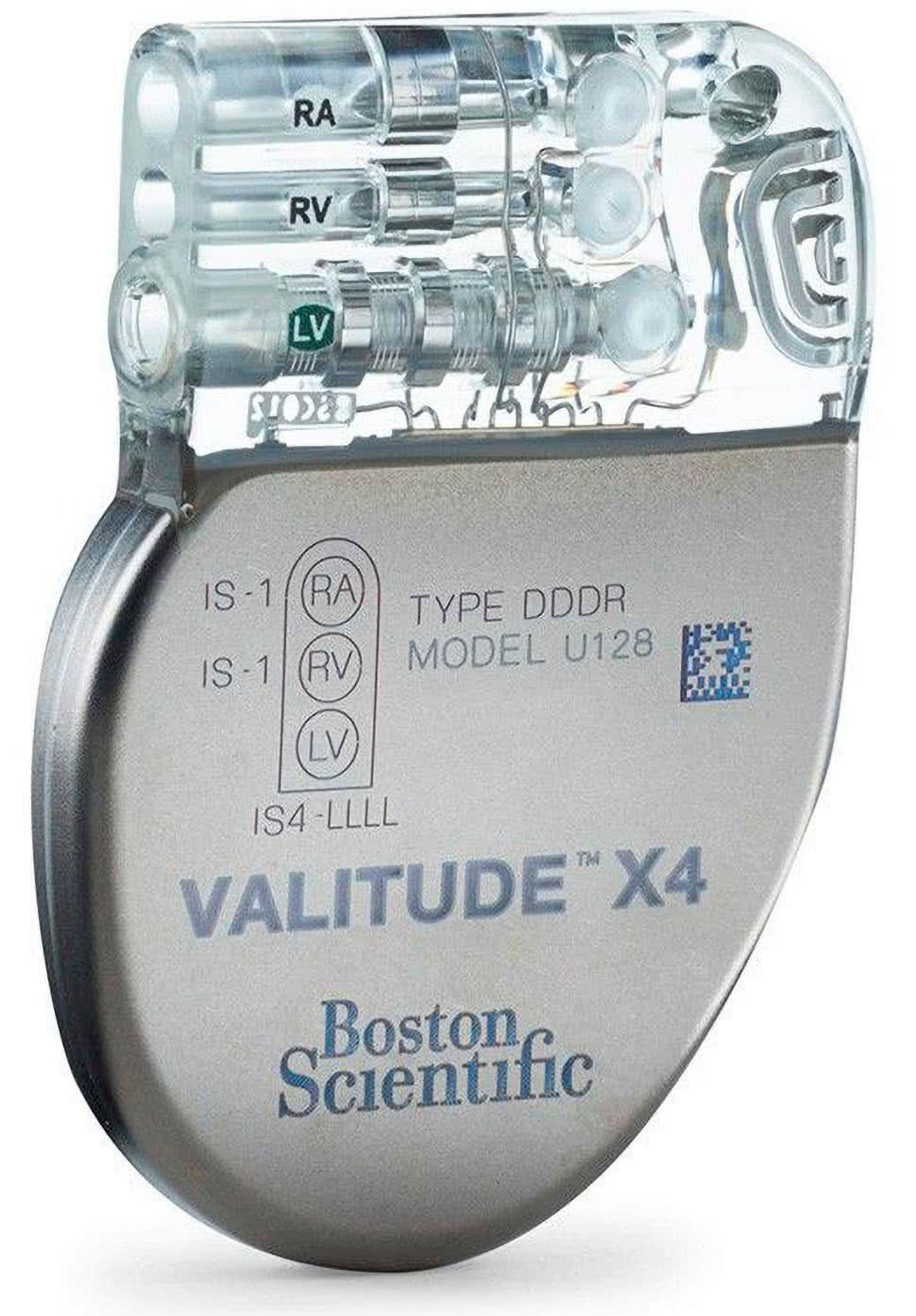
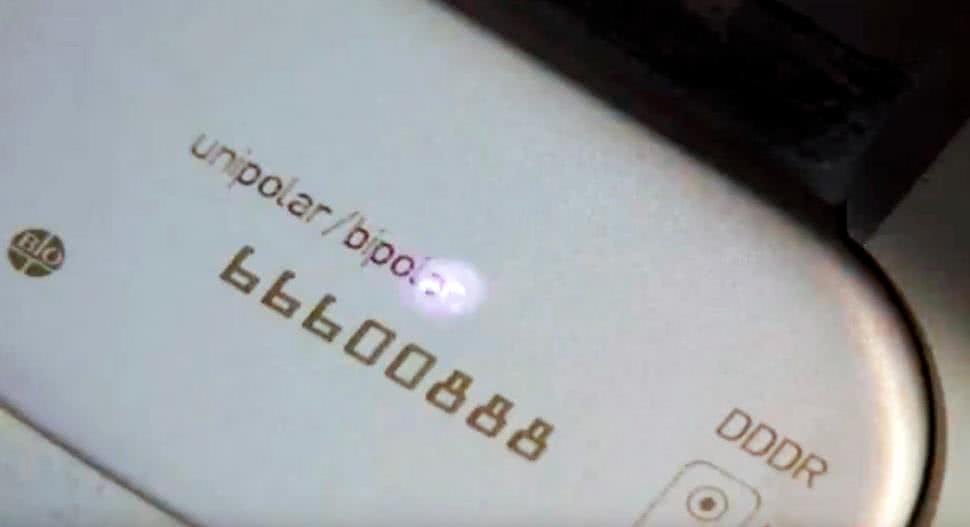
Kod NBG jest – obok rysunku prezentującego układ wprowadzeń (A – wyprowadzenia przedsionkowe, V – komorowe) – najważniejszym oznaczeniem technicznym, spotykanym na obudowie każdego stymulatora. Rzadko jednak można spotkać symbole dłuższe, niż 4 znaki – obecnie najczęściej można znaleźć urządzenia typu DDD czy DDDR (fotografia 1).

Co ciekawe, pomimo kilku rewizji kodu (pierwsza wersja, opracowana przez ICHD, powstała w już 1974 roku), niektórzy producenci nadal wykorzystują dodatkowe oznaczenia, które zniknęły z „oficjalnej” wersji zrewidowanej na przełomie XX i XXI wieku. Jako przykład można tutaj wskazać wskazać urządzenia chińskiej marki Qinming typu DDDC (litera C we wcześniejszych wersjach kodu oznaczała funkcje komunikacyjne/telemetryczne, które dziś są już standardem w każdym rozruszniku – patrz fotografia 2). Warto też dodać, że niektórzy producenci oznaczają rozruszniki jednojamowe z użyciem litery S (single), np. SSI – w tym przypadku elektroda stymulatora może być wszczepiona w komorze lub w przedsionku, zaś po wykryciu pobudzeń spontanicznych o odpowiednio wysokiej amplitudzie, generowanie impulsów zostaje wstrzymane.

Kardiowertery-defibrylatory (ICD)
Podczas, gdy sztuczne rozruszniki serca (kardiostymulatory) są przeznaczone do utrzymywania lub regulowania rytmu serca, kardiowertery-defibrylatory mają za zadanie przerwać groźne dla życia zaburzenia rytmu (takie, jak częstoskurcz komorowy czy też migotanie komór), niejako „resetując” serce i przywracając je w ten sposób do normalnej pracy. Istotna różnica pomiędzy kardiowersją, a defibrylacją, wynika z momentu, w którym dostarczany jest do serca wysokoenergetyczny impuls. Defibrylacja stanowi procedurę asynchroniczną – wysokoenergetyczne wyładowanie następuje niezależnie od aktualnej fazy cyklu pracy serca. Kardiowersja zaś polega na dostarczeniu impulsu o mniejszej energii, ale w ściśle określonym momencie aktywności bioelektrycznej serca i jest stosowana w tych przypadkach, w których asynchroniczne wyładowanie mogłoby pogorszyć stan pacjenta poprzez wywołanie jeszcze groźniejszych zaburzeń rytmu. Warto dodać, że kardiowertery-defibrylatory mogą posiadać także funkcję stymulacji, w ramach której pełnią rolę klasycznego rozrusznika serca.
Dla defibrylatorów także powstał kod, będący swego rodzaju adaptacją oznakowania NBG. W tym przypadku mamy do czynienia z czterema literami, kolejno:
- Jama w której następuje wyładowanie:
- O – brak,
- A – przedsionek (Atrium),
- V – komora (Ventricle),
- D – obie jamy (D = A + V).
- Jama serca stymulowana antytachyarytmicznie (tj. w celu przeciwdziałania tachyarytmiom, czyli zaburzeniom rytmu przebiegającym ze zbyt wysoką częstością skurczów):
- O – brak,
- A – przedsionek,
- V – komora,
- D – obie jamy (D = A + V).
- Metoda detekcji częstoskurczu:
- E – elektrogram (zapis aktywności elektrycznej wewnątrz serca),
- H – hemodynamika (zapis parametrów związanych z mechaniką pracy serca – rozwiązania oparte np. na czujnikach ciśnienia krwi są jednak niespotykane w praktyce).
- Jama serca stymulowana antybradyarytmicznie (tj. w celu przeciwdziałania bradyarytmiom, czyli zaburzeniom rytmu przebiegającym ze zbyt niską częstością skurczów):
- O – brak,
- A – przedsionek,
- V – komora,
- D – obie jamy (D = A + V).
CRT
Terapia resynchronizująca serca jest rozszerzeniem klasycznych terapii z użyciem rozruszników lub kardiowerterów-defibrylatorów. Poprzez zastosowanie dodatkowej, trzeciej elektrody, umieszczanej w rejonie lewej komory serca, możliwe jest zmniejszenie tzw. dyssynchronii. Zaburzenie to polega na patologicznym zwiększeniu opóźnienia pomiędzy elektrycznym pobudzeniem komór, a ich wynikowym skurczem. Jeżeli różnica czasu jest znaczna, serce nie jest w stanie skutecznie pompować właściwej ilości – stan taki określamy jako redukcja rzutu minutowego serca. Terapia CRT zyskała szczególne zainteresowanie klinicystów w kwestii leczenia pacjentów z niewydolnością serca (heart failure, HF) – czyli tych, których układ krążenia nie jest w stanie sprostać fizjologicznym potrzebom organizmu w zakresie ukrwienia narządów (najprościej mówiąc, serce pacjenta z HF jest za słabe, by zapewnić organizmowi właściwe funkcjonowanie, co powoduje m.in. niezwykle szybkie męczenie się przy jakimkolwiek wysiłku, a w skrajnych przypadkach nawet podczas spoczynku).
Urządzenia CRT to w rzeczywistości dwie podgrupy urządzeń – CRT-P (rozruszniki z dodatkowym kanałem dla lewej komory) oraz CRT-D (rozszerzenie klasycznego ICD o kanał lewokomorowy).
Polaryzacja i układ elektrod
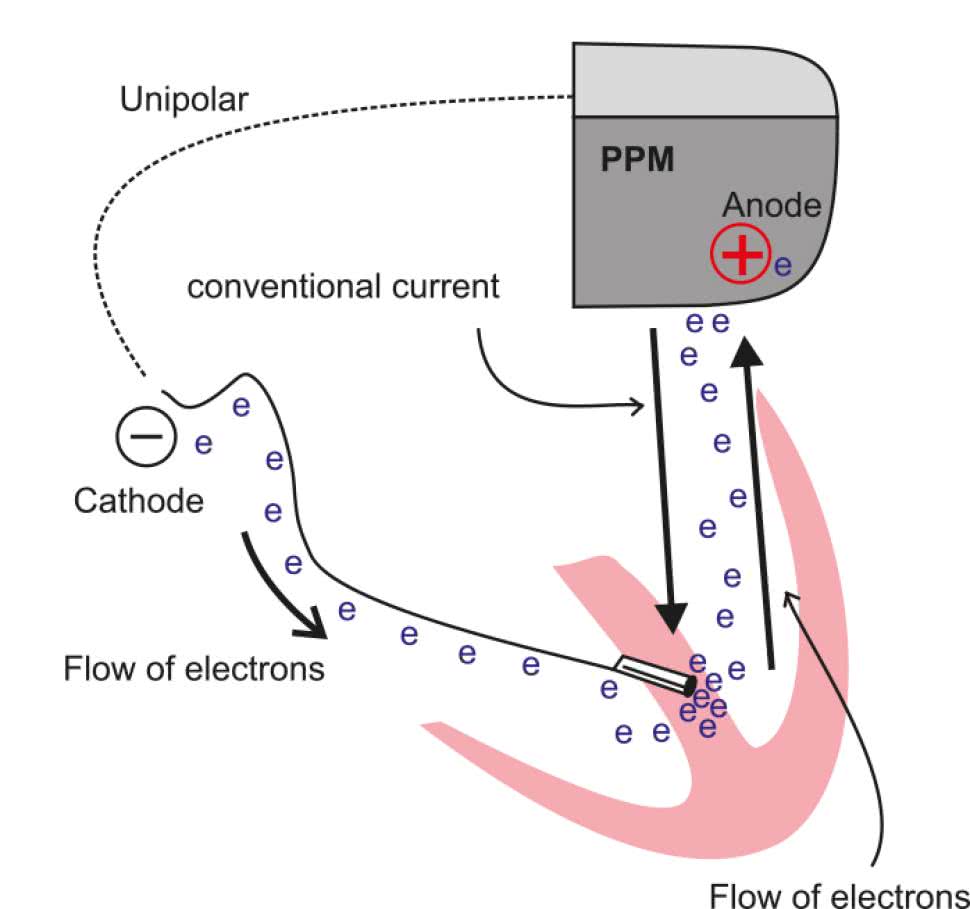
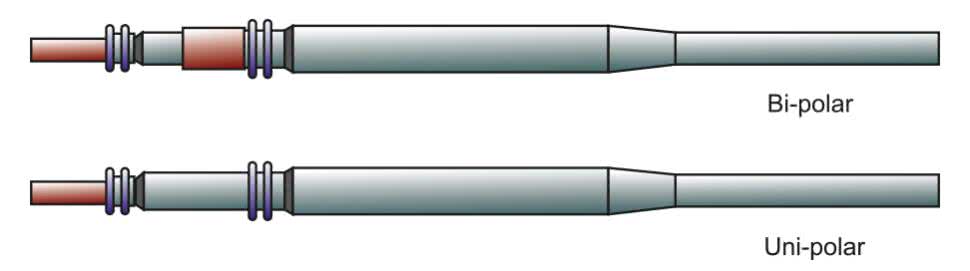
Pierwsze rozruszniki serca korzystały z elektrod mocowanych na zewnętrznej powierzchni mięśnia sercowego (tzw. elektrody nasierdziowe), co umożliwiało chirurgom umiejscowienie wyprowadzeń wyjściowych generatora dokładnie tam, gdzie było to konieczne z medycznego punktu widzenia. Przejście na elektrody implantowane z dostępu naczyniowego spowodowało jednak, iż konstruktorzy rozruszników zaczęli wykorzystywać tytanową obudowę urządzenia jako anodę, zaś do wnętrza serca wszczepiana była tylko sama katoda (rysunek 3).
Takie rozwiązanie – określane mianem stymulacji unipolarnej – miało pewne zalety, do których należy zaliczyć przede wszystkim:
- prostszą konstrukcję (a zatem niższy koszt) elektrody,
- mniejszą średnicę zewnętrzną elektrody i – co za tym idzie – większą elastyczność.
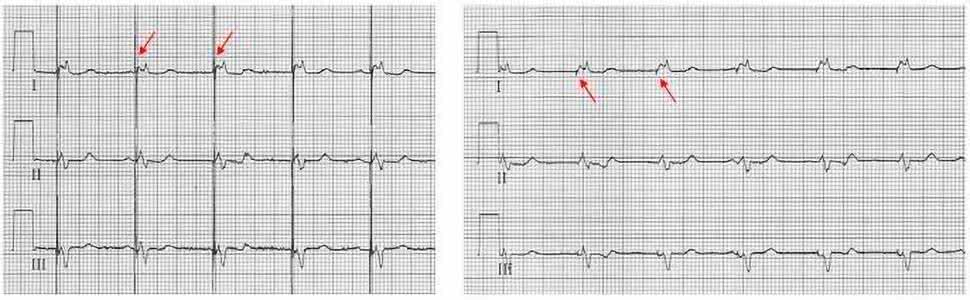
Z uwagi na szeroki obszar tkanek pacjenta objęty polem elektrycznym (wytwarzanym podczas impulsu pomiędzy katodą, a obudową stymulatora), w zapisach EKG u pacjentów z wszczepionymi elektrodami unipolarnymi można zauważyć bardzo wyraźne „szpilki” odpowiadające impulsom stymulatora (rysunek 4), choć – z drugiej strony – w niektórych przypadkach zbyt silne artefakty mogą utrudniać właściwą obserwację i interpretację sygnału elektrokardiograficznego, zwłaszcza w uproszczonych konfiguracjach odprowadzeń o zmniejszonej liczbie kanałów pomiarowych. Stymulacja unipolarna ma jednak szereg znacznie istotniejszych wad, do których zaliczyć należy m.in. większą podatność na artefakty pochodzenia pozasercowego (co nie dziwi z uwagi na fakt, iż wzmacniacz wejściowy stymulatora zbiera sygnał z większego obszaru ciała, w dodatku o dość wysokiej impedancji) oraz ryzyko przypadkowego pobudzenia pobliskich mięśni lub nerwów obwodowych.
Rozwój technologii produkcji elektrod kardiostymulatorów doprowadził do opracowania (w latach 80. XX wieku) elektrod bipolarnych, w których anoda ma postać pierścienia, umieszczonego proksymalnie (tj. – w tym przypadku – bliżej stymulatora) w stosunku do końcówki (katody).
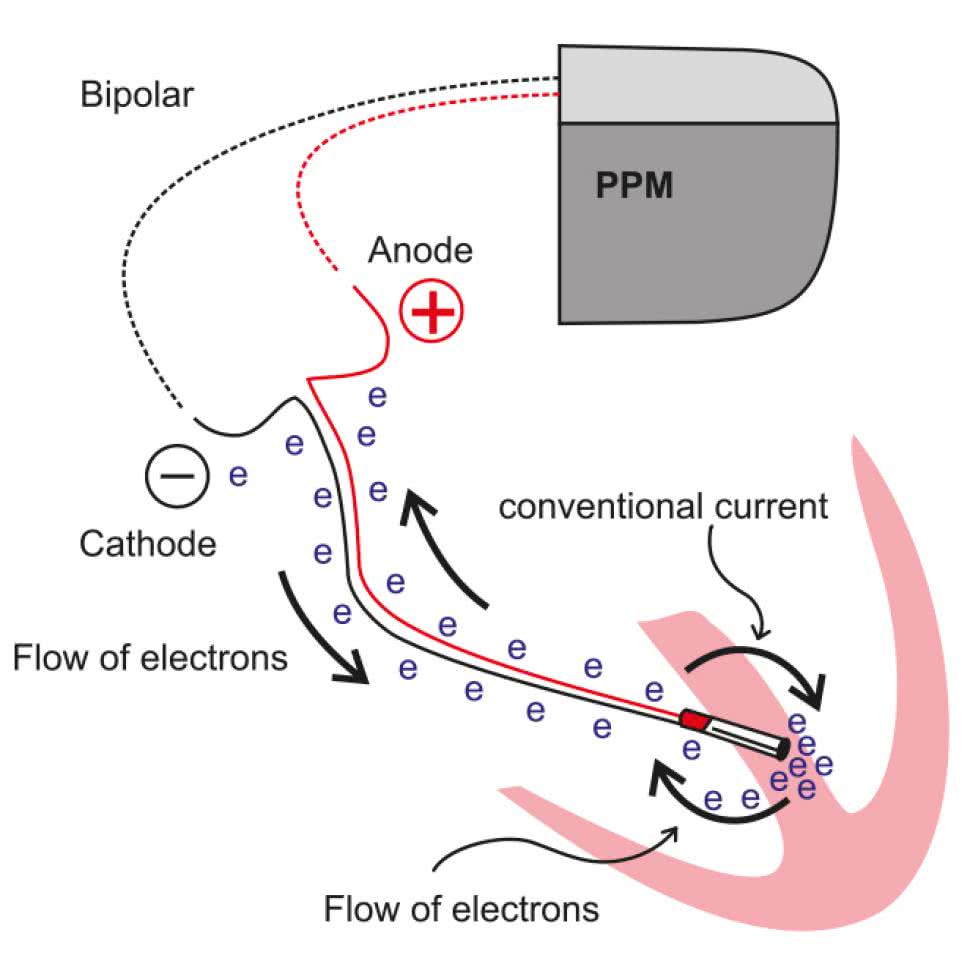
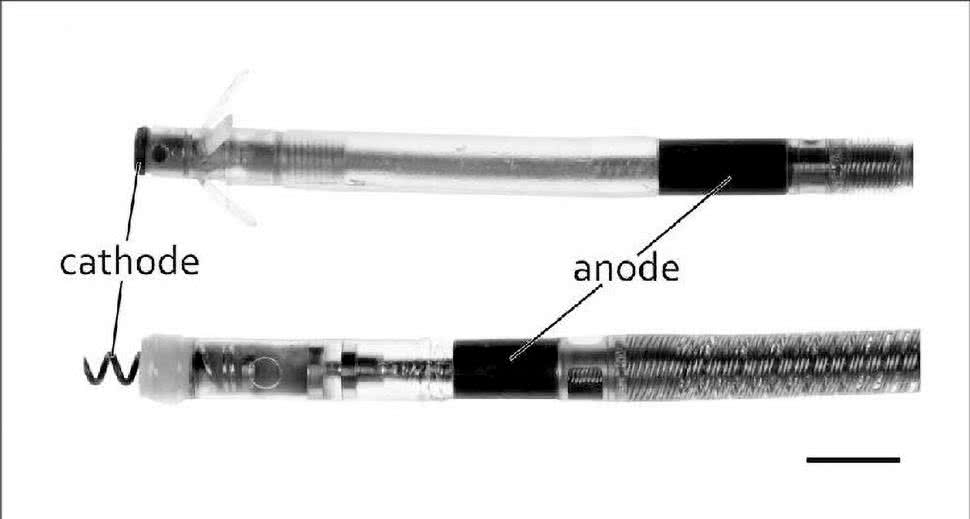
Takie rozwiązanie sprawia, że obieg prądów stymulujących jest wielokrotnie krótszy, niż w przypadku stymulacji unipolarnej (zamyka się bowiem na obszarze rzędu kilku… kilkunastu milimetrów – rysunek 5, fotografia 3), co prowadzi m.in. do znacznego osłabienia artefaktów w zapisach EKG oraz redukcji ryzyka błędnej aktywacji rozrusznika (spowodowanej np. zakłóceniami EMI czy też aktywnością mięśni szkieletowych). Warto dodać, że – z technicznego punktu widzenia – zastosowanie elektrod bipolarnych nie uniemożliwia przeprogramowania go w razie potrzeby na tryb unipolarny. W takim przypadku anoda jest po prostu elektronicznie przełączana z pierścienia, znajdującego się we wszczepionej elektrodzie, na metalową puszkę obudowy elektrostymulatora (rzecz jasna, dostępność takiej funkcji zależy od modelu stymulatora).
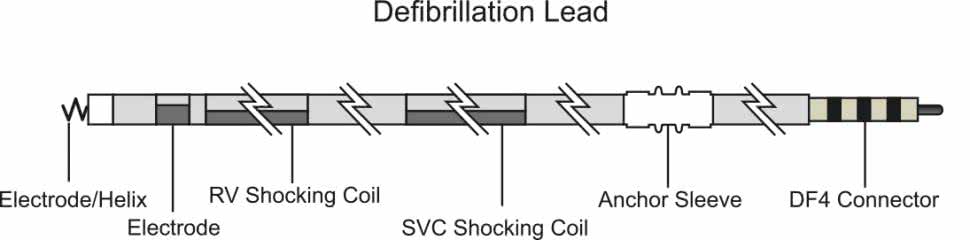
Wszczepialne kardiowertery-defibrylatory korzystają z bardziej rozbudowanych elektrod, posiadających dodatkowe powierzchnie stykowe, przeznaczone do dostarczania wysokonapięciowych impulsów w prawej komorze serca oraz żyle głównej górnej (SVC – superior vena cava). Przykładowe rozwiązanie pokazano na rysunku 6.
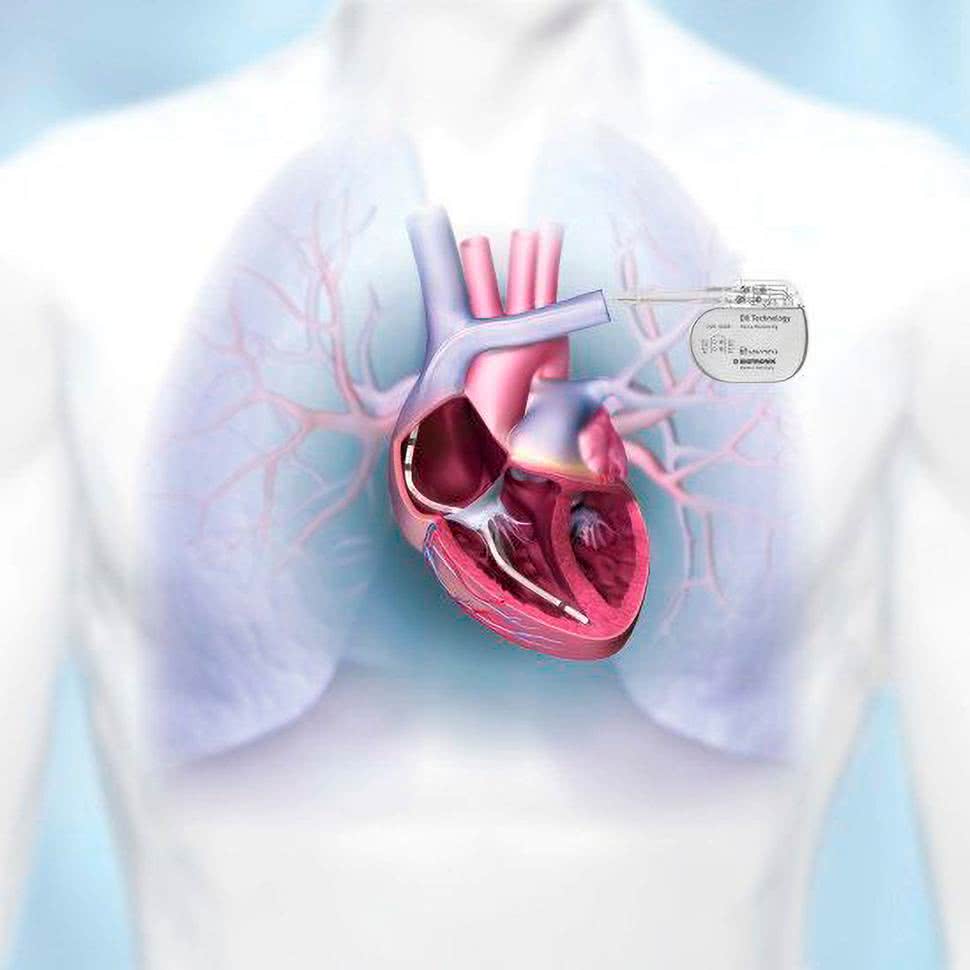
Gwoli ścisłości warto dodać, iż na rynku pojawiły się także rozwiązania o nieco zbliżonej konstrukcji, ale przeznaczone do zgoła innego celu. Urządzenia bazujące na technologii DX marki Biotronik (fotografia 4) umożliwiają „zdalną” detekcję aktywności prawego przedsionka, jednak bez konieczności implantacji dedykowanej dlań elektrody – zamiast niej wykorzystywane są dodatkowe pierścienie „dipolowe”, umieszczone w tak dobranej odległości od końcówki części komorowej, że po wszczepieniu znajdują się one na wysokości przedsionka (rysunek 7).

Umożliwia to znaczące skrócenie procedury implantacji ICD (co przekłada się na mniejsze obciążenie pacjenta oraz oszczędność czasu i pieniędzy szpitala) u pacjentów, którzy wprawdzie nie wymagają stymulacji przedsionków, jednak są zagrożeni występowaniem epizodów migotania przedsionków, które pozostałyby niewykrywalne przy użyciu samej tylko elektrody komorowej. Co jednak ważniejsze, zastosowanie „zdalnej” detekcji aktywności przedsionków pozwala zredukować ryzyko „pomylenia” arytmii nadkomorowych z komorowymi, co ma niebagatelne znaczenie dla bezpieczeństwa terapii.
Budowa końcówek elektrod
Konstrukcja elektrod musi spełniać szereg istotnych wymogów technicznych, do których należą przede wszystkim:
- możliwość niezawodnego zamocowania końcówki w docelowym punkcie mięśnia sercowego,
- odpowiednia elastyczność i wysoka odporność na zginanie,
- dobry kontakt elektryczny z tkanką mięśnia sercowego,
- wtyk umożliwiający hermetyczne i niezawodne zamocowanie w gnieździe stymulatora.
Wszystkie elektrody kardiostymulatorów oraz ICD można podzielić ze względu na sposób ich kotwiczenia w tkance miokardium.

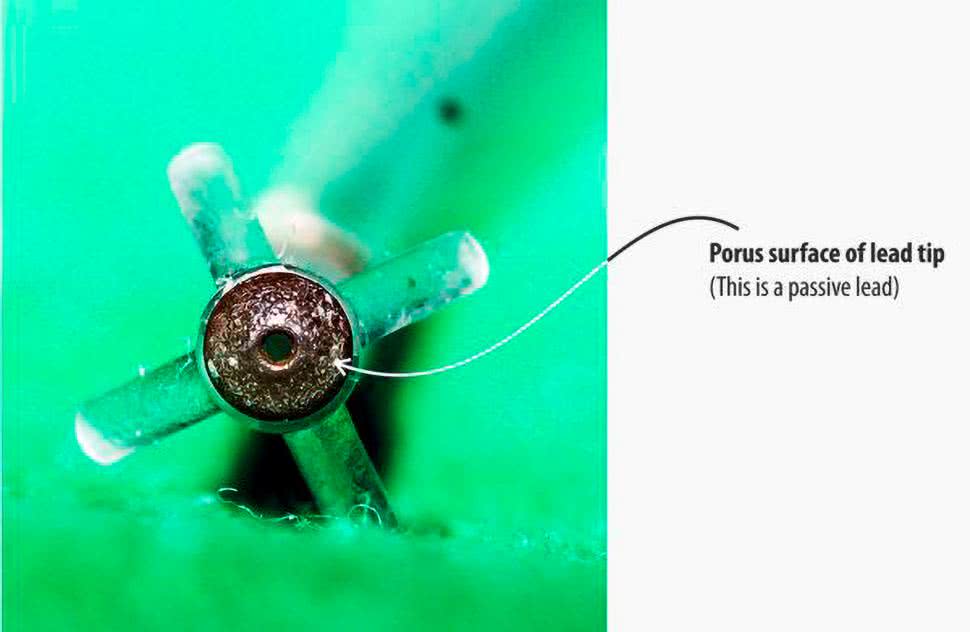
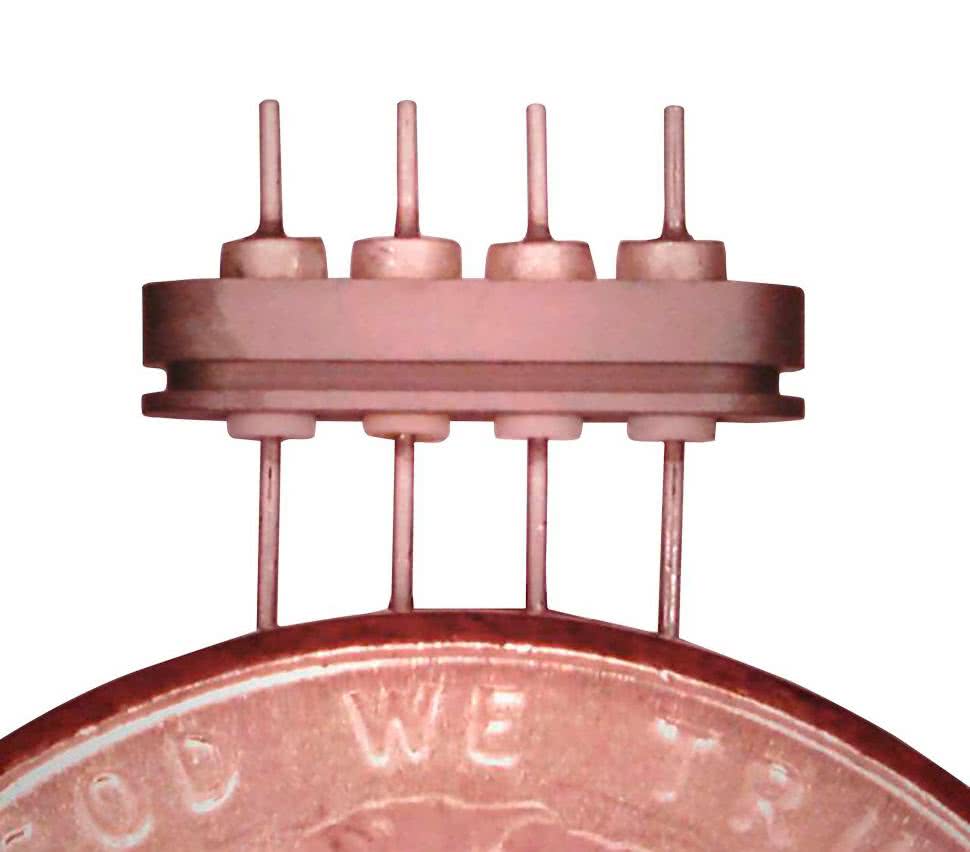
- Elektrody z mocowaniem pasywnym (rysunek 8) mają obłą (zwykle sferyczną lub spłaszczoną) końcówkę o silnie chropowatej powierzchni (fotografia 5), ułatwiającej wrastanie w tkankę i zwiększającej efektywną powierzchnię kontaktu elektrycznego. Implantacja odbywa się poprzez dociśnięcie elektrody do mięśnia sercowego, najczęściej w rejonie koniuszka prawej komory – miejsce to, z uwagi na duże zagęszczenie tzw. beleczek mięśniowych, doskonale „współpracuje” z niewielkimi haczykami, które zakleszczając się w rozbudowanej strukturze miokardium powodują zablokowanie elektrody w pożądanej pozycji (gwoli ścisłości należy wspomnieć, ze istnieje też możliwość fiksacji elektrod pasywnych w prawym przedsionku). Do zalet tego rozwiązana należy zaliczyć mniejszą inwazyjność implantacji, która nie wiąże się z bezpośrednim uszkodzeniem mięśnia sercowego.
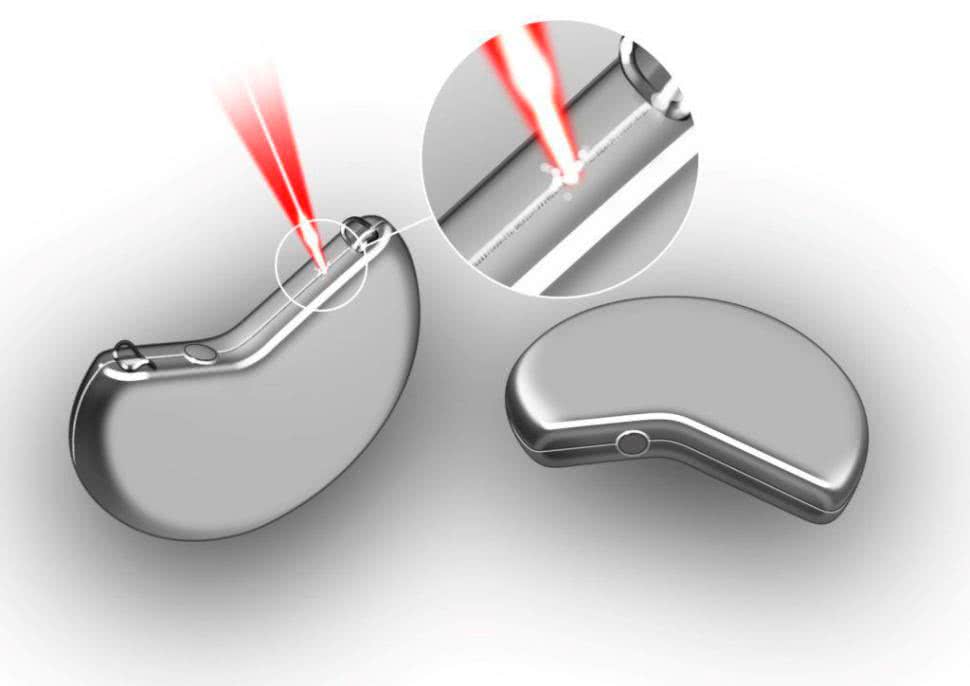
Pewną wadą elektrod pasywnych jest trudność z ich usuwaniem po długotrwałej eksploatacji przez pacjenta – z tego też względu powstał szereg urządzeń, wprowadzanych przez dostęp naczyniowy (przy wykorzystaniu elektrody jako prowadnika) i służących do bezpiecznego wycięcia elektrody z przyrośniętej tkanki. W zależności od modelu, urządzenia te bazują na specjalnych, mechanicznych nożach obrotowych (fotografia 6) lub cewnikach z wbudowanymi na obwodzie światłowodami, transmitującymi promieniowanie lasera ultrafioletowego o długości fali równej 308 nm, generowanego impulsowo z częstotliwością powtarzania od 25 do 80 Hz (fotografia 7).


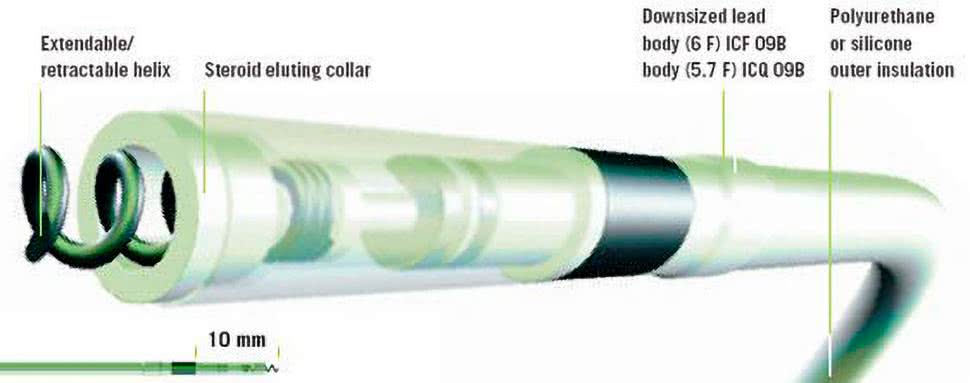
- Elektrody z mocowaniem aktywnym są pozbawione haczyków, zaś końcówka (katoda) ma postać cienkiej, ostro zakończonej spiralki (rysunek 9), którą lekarz samodzielnie wkręca bezpośrednio w tkankę mięśnia sercowego (np. ścianę komory lub przegrodę międzykomorową), obracając w tym celu specjalne narzędzie, umieszczone na zewnętrznym końcu elektrody (przed jej podłączeniem do gniazda stymulatora). W czasie wszczepiania z końcówki zsuwana jest osłona, chroniąca układ naczyniowy i struktury serca przed uszkodzeniem (w tym szczególnie perforacją) podczas wprowadzania.
Istotną wadą elektrod tego typu jest znacznie większa inwazyjność, wiążąca się z koniecznością wkręcenia gwintu bezpośrednio w mięsień sercowy. Z drugiej strony, mocowanie aktywne jest uważane za bardziej niezawodne i uniwersalne, w porównaniu do fiksacji pasywnej, nieco łatwiej przebiega też usuwanie elektrod aktywnych po dłuższym czasie od implantacji.
Aspekty materiałowe i konstrukcyjne w produkcji przewodów elektrod implantowalnych
Środowisko panujące wewnątrz ciała człowieka jest – wbrew pozorom – bardzo agresywne dla wprowadzonych doń urządzeń i akcesoriów, głównie z uwagi na chemiczne oddziaływanie płynów ustrojowych na stosowane w inżynierii biomedycznej materiały. Co więcej, duże znaczenie dla zmęczenia mechanicznego ma także istotna ruchomość – nie należy zapominać, że elektrody wszczepiane do ludzkiego serca są poddawane nie tylko zginaniu w wyniku ruchu mięśni w rejonie obręczy barkowej, ale także – a raczej przede wszystkim – powtarzalnym cyklom pracy serca. Przyjmując, że tętno pacjenta wynosi 70 uderzeń/minutę, otrzymujemy zawrotną liczbę prawie 37 milionów (!) cykli zginania w ciągu roku – a należałoby przecież uwzględnić wzrost częstości rytmu serca podczas zwiększonej aktywności fizycznej pacjenta.
Proste (i bardzo zawodne) przewody stosowane w pierwszych generacjach rozruszników serca zostały dość szybko zastąpione znacznie bardziej wytrzymałymi mechanicznie przewodami spiralnymi, które – z uwagi na doskonałe osiągi – są stosowane do dziś. Istnieją jednak dwie główne odmiany, różniące się sposobem nawinięcia przewodów (w przypadku elektrod bipolarnych):
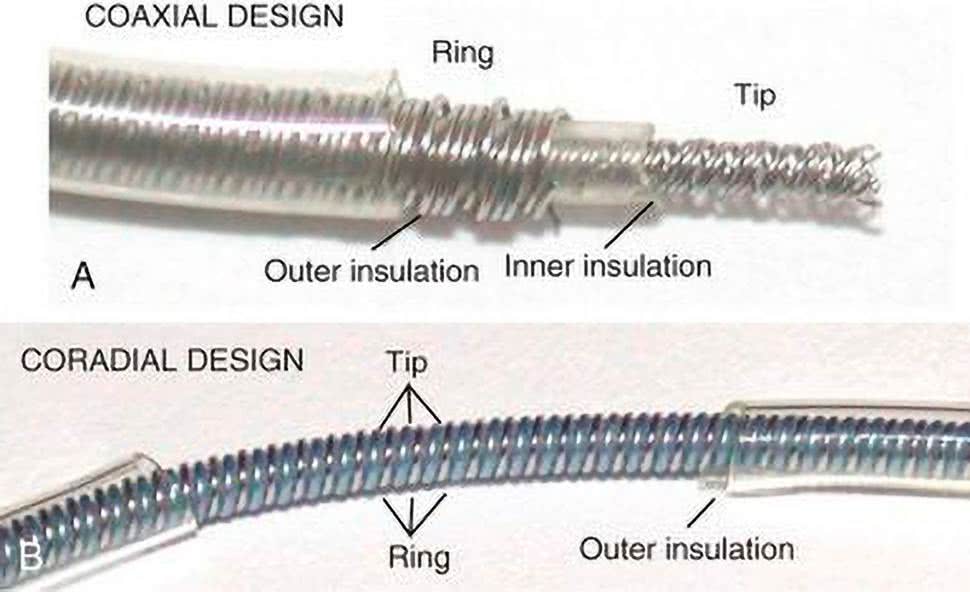
- konstrukcja koncentryczna (coaxial) – końcówka elektrody (katoda) jest podłączona za pomocą środkowego przewodu spiralnego, osłoniętego cienką warstwą izolacji od zewnętrznego oplotu, łączącego wtyk stymulatorowy z pierścieniem anody (fotografia 8). Całość jest pokryta zewnętrzną izolacją, bezpośrednio kontaktującą się z ciałem pacjenta.
- konstrukcja typu coradial – w tym przypadku obydwa przewody są nawinięte w sposób, przypominający nieco uzwojenie bifilarne: cienka warstwa izolacji drutu nawojowego umożliwia wspólne nawinięcie obu żył, prowadzących do poszczególnych styków elektrody (patrz fotografia 7). Niewątpliwą zaletą takiego rozwiązania jest zmniejszenie liczby wewnętrznych warstw elektrody, co redukuje jej wynikową średnicę.
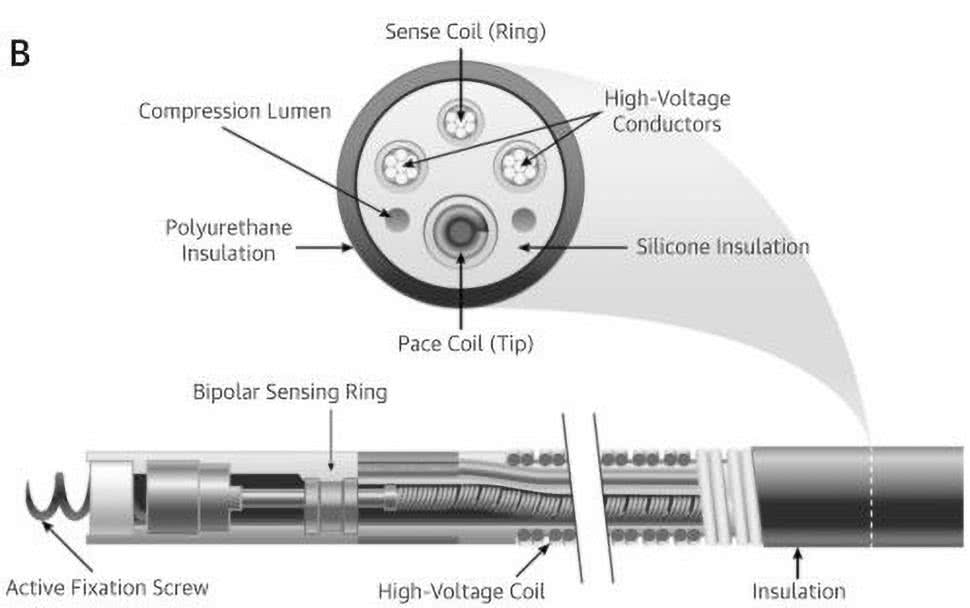
W przypadku wszczepialnych kardiowerterów-defibrylatorów (ICD) istnieje konieczność poprowadzenia – oprócz przewodów służących do detekcji spontanicznej aktywności serca oraz ewentualnego przesyłu słabych impulsów stymulujących – także dodatkowego okablowania, umożliwiającego dostarczanie do miokardium wysokonapięciowych wyładowań podczas procedury kardiowersji lub defibrylacji. Choć istnieje możliwość wyprodukowania przewodów koncentrycznych o liczbie przewodników przekraczającej 2 (rysunek 10), to w praktyce stosuje się podejście określane mianem multilumen design.
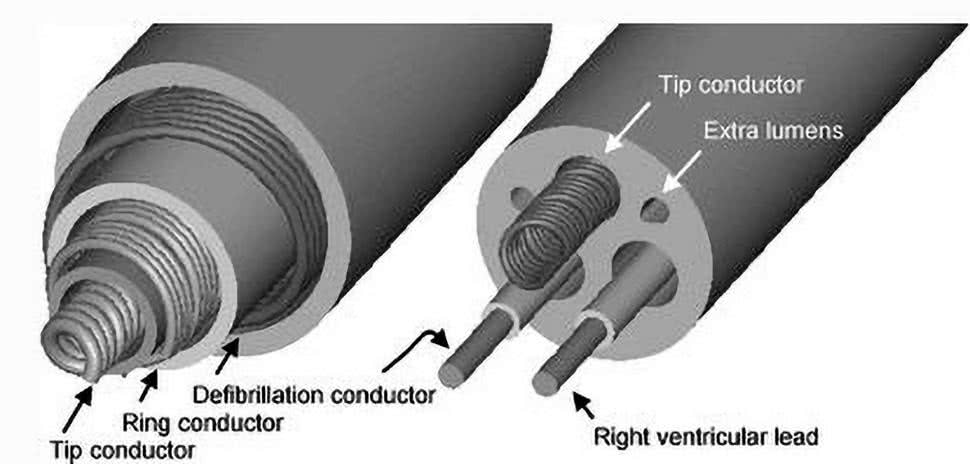
Co ciekawe, choć tego typu okablowanie przypomina (pod względem koncepcyjnym) przemysłowe kable hybrydowe, to producenci zdecydowali się pozostać przy stosowaniu żył o konstrukcji spiralnej, wspomaganych jedynie przez „zwykłe” przewodniki linkowe. Przykłady pokazano na rysunkach 11 i 12. Dodatkowe, puste kanały, oznaczane na rysunkach mianem compression lumen, zwiększają odporność całości na zewnętrzne siły ściskające.

Od strony materiałowej, elektrody stawiają inżynierom szczególnie restrykcyjne wymagania. Wszczepione przeznaczyniowo przewody muszą być bowiem wysoce biokompatybilne, odporne mechanicznie, stabilne pod względem chemicznym oraz możliwie elastyczne i jednocześnie stosunkowo wygodne do prowadzenia w świetle naczynia krwionośnego. Dodatkowo, istotnym ograniczeniem są wymiary całości – średnica elektrod mieści się przeważnie w zakresie od około 1,1 mm do około 2,2 mm. Z tego też względu producenci elektrod do rozruszników i ICD stosują najwyższej klasy, dopuszczone do użytku medycznego materiały izolacyjne, w tym najczęściej:
- poliuretan – biozgodny, odporny na rozciąganie, szczególnie chętnie wykorzystywany z uwagi na bardzo niski współczynnik tarcia, znacząco ułatwiający przesuwanie kabla wewnątrz naczynia podczas implantacji. Do wad poliuretanu należy tendencja do tworzenia mikropęknięć oraz reaktywność z jonami metali. Przykładowy poliuretan termoplastyczny (TPU), wykorzystywany w urządzeniach implantowalnych, to Biomedical Elasthane™ 55D marki DSM Biomedical B.V.
- silikon – obojętny, biozgodny i biostabilny materiał o wysokiej elastyczności, charakteryzujący się jednak dość dużym współczynnikiem tarcia (w porównaniu do poliuretaunu oraz PTFE) oraz mniejszą odpornością na uszkodzenia mechaniczne podczas implantacji (np. w wyniku kontaktu z ostrym narzędziem). Pewnym problemem jest także tendencja silikonu do pęcznienia w kontakcie z płynami, choć i ta cecha materiału została wykorzystana praktycznie. Niektórzy producenci oferują bowiem specjalne… płyny spęczniające, ułatwiające pracę z silikonowymi rurkami o małym przekroju (poprzez chwilowe rozszerzenie światła rurki znacznie łatwiej jest umieścić w jego wnętrzu montowane elementy). Jako przykład wysoce biozgodnego silikonu medycznego można wskazać dwuskładnikowy MED-4719 marki NuSil.
- fluoropolimery (PTFE oraz ETFE) – oprócz bardzo wysokiej biozgodności i minimalnego współczynnika tarcia, zapewniają także możliwość zmniejszenia wymiarów (przekroju) elektrody dzięki zastosowaniu cienkich warstw materiału izolacyjnego. Do wad tej grupy materiałów należy stosunkowo wysoka sztywność oraz trudności stwarzane przez nie w procesie produkcyjnym. Warto dodać, że polimer GORE™ ePTFE (extended PTFE) był nawet stosowany do dodatkowego pokrywania elektrod ICD, co znacząco ułatwiało ich usuwanie z ciała pacjenta – dzięki śliskiej powierzchni możliwe jest bowiem zredukowanie ryzyka obrastania elektrody przez otaczające tkanki [1].
Do produkcji przewodzących części elektrod stosuje się szereg specjalistycznych stopów, do których zaliczyć należy przede wszystkim niklowo-kobaltowy stop MP35N (NiCoCrMo) o doskonałej odporności na korozję i wysokiej wytrzymałości mechanicznej, jednak – niestety – także dość wysokiej oporności właściwej. Z tego też względu typowa rezystancja (zaledwie półmetrowych) przewodów elektrod wynosi aż kilkadziesiąt omów. Elementy pozostające w bezpośrednim kontakcie z tkanką miokardium są natomiast wykonywane na bazie stopów platyny (np. platyna-iryd), dodatkowo platynowanych lub pokrywanych warstwą azotku tytanu. Wyjątkiem są wysokonapięciowe przewodniki elektrod, stosowanych w kardiowerterach-defibrylatorach – w tym przypadku, w celu obniżenia strat transmisyjnych, stosowane są stopy o niskiej rezystancji, bazujące m.in. na platynie i irydzie bądź srebrze.
Zarówno elektrody z mocowaniem pasywnym, jak i modele wyposażone w końcówkę do fiksacji aktywnej, są dziś powszechnie wyposażane w nośniki leków steroidowych (gł. octanu deksametazonu – DXA), którego celem jest zapobieganie ostremu lub przewlekłemu zapaleniu tkanki wokół elektrody. Stany zapalne w dłuższym okresie eksploatacji rozrusznika powodują bowiem powstawanie zwłóknień otaczających punkt implantacji elektrody i prowadzących do stopniowego pogarszania kontaktu elektrycznego katody z mięśniem sercowym, co w efekcie podwyższa wymagany próg czułości stymulatora oraz zwiększa poziom energii, niezbędnej do efektywnego wywołania skurczu. Nietrudno domyślić się zatem, że konsekwencją stosowania aktywnych farmakologicznie elektrod jest… oszczędność energii i wydłużenie czasu pracy stymulatora. Pierścienie zawierające nośniki leków – zarówno w elektrodach do mocowania aktywnego, jak i pasywnego – zostały odpowiednio oznaczone na rysunkach 8 i 9.
Rozruszniki bezelektrodowe
W ostatnich latach rynek aparatury medycznej obiegły informacje o wprowadzeniu do użycia klinicznego całkowicie nowego typu rozrusznika, określanego mianem bezelektrodowego. Pojęcie to może być nieco mylące z technicznego punktu widzenia, gdyż urządzenie istotnie posiada elektrody, jednak są one na stałe przytwierdzone do obudowy i – zamiast długich przewodów wprowadzanych do serca przeznaczyniowo – mają postać specjalnych haczyków, mocujących rozrusznik... bezpośrednio do ściany prawej komory serca, gdyż niewielkie wymiary urządzenia pozwalają wprowadzić go przez żyłę udową, bez konieczności wykonywania kieszonki dla implantu pod skórą klatki piersiowej.
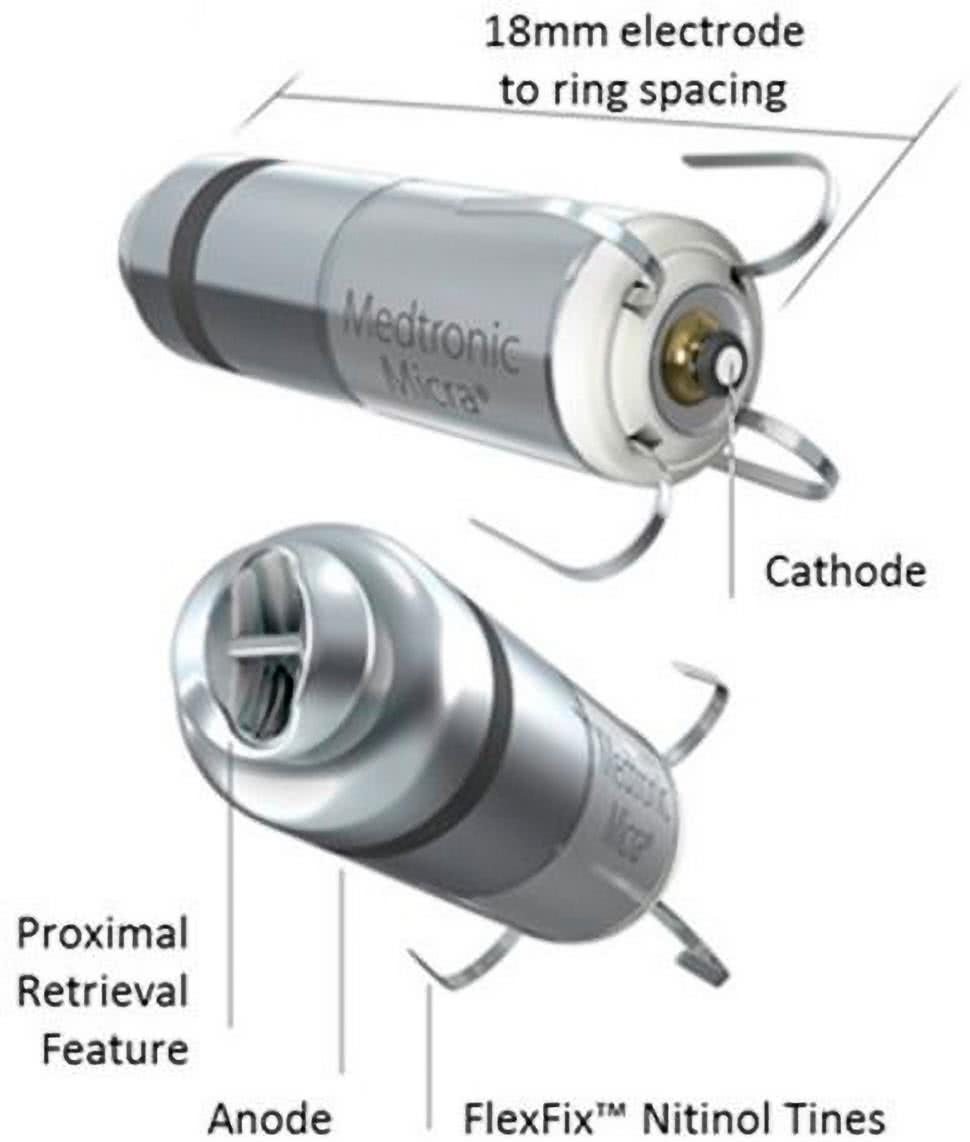
Porównanie rozmiarów dwóch wprowadzonych do klinicznego użytku konstrukcji rozruszników bezelektrodowych – Micra TPS (wyprodukowanego przez firmę Medtronic) oraz Nanostim (marki St. Jude Medical) zostały pokazane na fotografii 9.

Ten pierwszy – w chwili pisania niniejszego artykułu najmniejszy elektrostymulator na świecie – ma wymiary 25,9 mm (długość) × 6,7 mm (średnica obudowy) i masę zaledwie 2 gramów (!), zaś do zamocowania w tkance miokardium służą „wąsy” przypominające nieco system stosowany w konwencjonalnych elektrodach pasywnych. Dla porównania – Nanostim ma długość aż 42 mm i średnicę niewiele mniejszą, bo równą 5,99 mm, zaś jego mocowanie opiera się na wkręcanej końcówce, działającej w sposób zbliżony do elektrod przeznaczonych do fiksacji aktywnej. Co ciekawe, górna granica żywotności (czasu pracy) zaledwie nieznacznie różni się na korzyść urządzenia Nanostim (9,8 roku w porównaniu do 9,6 roku dla Micra TPS).
Obecnie zdania odnośnie użycia rozruszników bezelektrodowych są podzielone – pomimo oczywistych zalet (związanych m.in. z redukcją ilości dostępów chirurgicznych czy też doskonałym efektem estetycznym, ograniczającym ranę pozabiegową tylko do pachwiny), wątpliwości budzą trudności w eksplantacji (usunięciu) takiego aparatu z wnętrza serca, czy też ryzyko perforacji mięśnia sercowego podczas implantacji rozrusznika. Firma Medtronic, w ostrzeżeniach dotyczących potencjalnych komplikacji podczas procedury wszczepiania urządzenia Micra TPS, zwraca uwagę, iż usunięcie urządzenia może być utrudnione z uwagi na otaczające je zwłóknienia w tkance mięśnia sercowego. Obejściem problemu jest zatem… całkowite wyłączenie stymulatora i pozostawienie go w sercu do końca życia pacjenta – trudno byłoby bowiem wyobrazić sobie otwieranie klatki piersiowej (przez sternotomię lub przynajmniej torakotomię) i samego serca jedynie w celu usunięcia starego rozrusznika.
Ciekawe rozwiązanie w zakresie kardiostymulatorów bezelektrodowych opracowała firma Abott. Dostrzegłszy problem ograniczenia zastosowań tego rodzaju urządzeń jedynie do sytuacji klinicznych, w których wystarczająca jest stymulacja jednojamowa, inżynierowie stworzyli system złożony z… dwóch rozruszników (niewiele różniących się pomiędzy sobą rozmiarami), z których jeden jest przeznaczony do implantacji w komorze, zaś drugi – w przedsionku (fotografia 11).
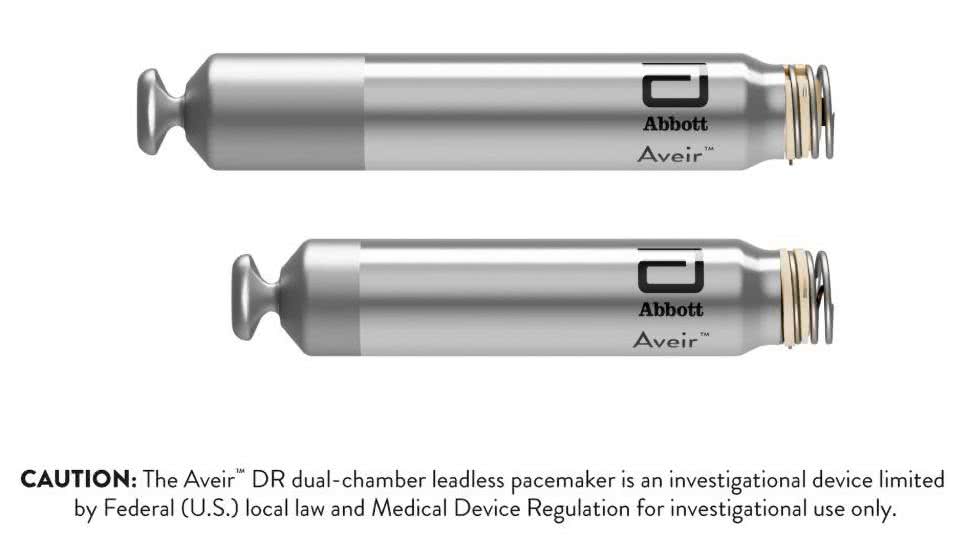
Obydwa urządzenia komunikują się pomiędzy sobą bezprzewodowo, co pozwala na w pełni synchroniczną pracę pomimo braku połączenia galwanicznego. Ten interesujący system został po raz pierwszy wszczepiony u człowieka w klinice w Cleveland (USA) na początku ubiegłego roku, zaś eksperymentalny zabieg był częścią ogólnoświatowego badania klinicznego.
Kolejną innowacją, o której zdecydowanie warto wspomnieć, jest druga generacja rozruszników bezelektrodowych firmy Medtronic – Micra™ AV. W tym przypadku producent zdecydował się na wykorzystanie… akcelerometru w celu wykrywania aktywności przedsionków. Takie rozwiązanie umożliwia pracę w trybie VDD (stymulacja komory, detekcja w obu jamach), nawet pomimo braku fizycznego (galwanicznego) połączenia z prawym przedsionkiem – sygnałem informującym o skurczu przedsionków są zafalowania w odczycie z czujnika przyspieszenia. Micra™ AV jest zatem pierwszym kardiostymulatorem na świecie, który do sensingu wykorzystuje metodę inną, niż elektrogram.
Złącza elektrod
Obszar technologii skupionych wokół terapii bioelektrycznej serca – podobnie, jak niemal wszystkie inne dziedziny techniki medycznej – podlega silnej standaryzacji, z korzyścią zarówno dla lekarzy (uproszczenie procedur implantacji urządzeń i większa elastyczność w kompletowaniu zaopatrzenia), jak i pacjentów (możliwość dobrania optymalnych akcesoriów dla potrzeb danego pacjenta). Nie inaczej jest w przypadku gniazd i wtyków, stosowanych do łączenia elektrod z urządzeniami (rozrusznikami oraz ICD).
Współczesne kardiostymulatory wszczepialne korzystają niemal wyłącznie ze standardu określanego jako IS-1 lub IS-4. Złącza IS-1 (rysunek 13) występują w dwóch wersjach: IS-1 Uni (unipolarnej) oraz IS-1 Bi (bipolarnej) – choć wymiarowo są takie same, różnią się obecnością dodatkowego pierścienia (w wersji bipolarnej), służącego do podłączenia anody. Podobną koncepcję konstrukcyjną zastosowano w przypadku czteroelektrodowego złącza IS-4, wykorzystywanego w bardziej rozbudowanych stymulatorach (głównie CRT – patrz fotografia 12).
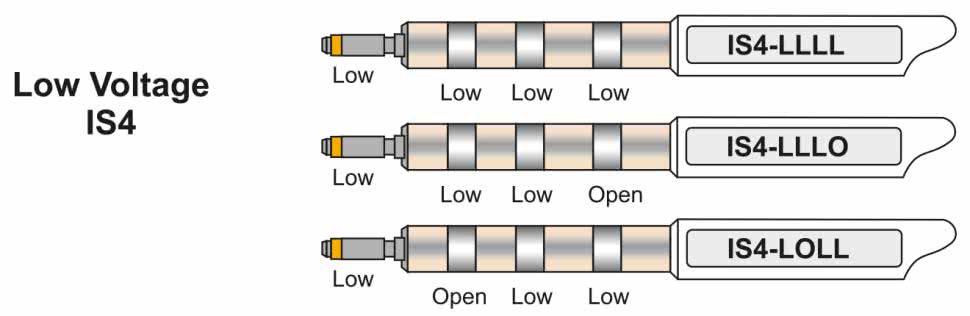
Oprócz oznaczenia typu złącza, na obudowach kardiostymulatorów często można też spotkać dodatkowy kod, określający poziom potencjałów oraz – w ogóle – obecność połączenia elektrycznego z danym stykiem gniazda. Przykładowe konfiguracje zostały pokazane na rysunku 14.
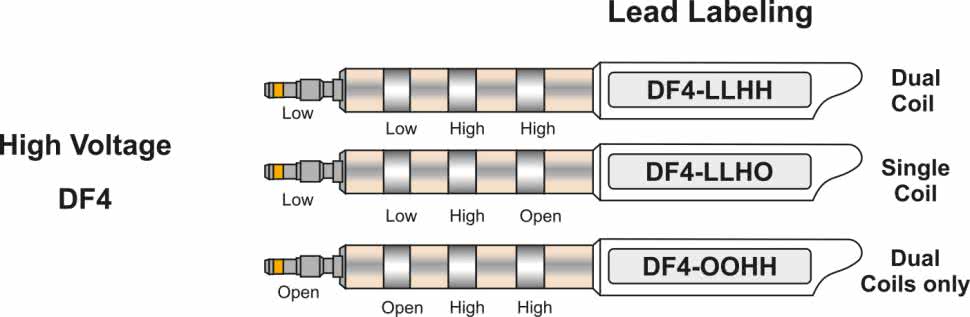
Złącza IS-1 i IS-4 są przeznaczone do pracy z niskimi napięciami (zwykle rzędu kilku woltów), stosowanymi w kardiostymulatorach. Wszczepialne kardiowertery-defibrylatory wymagają jednak rozwiązań znacznie bardziej zaawansowanych pod względem wytrzymałości dielektrycznej. Dlatego też urządzenia ICD oraz CRT-D korzystają z dedykowanych złączy typu DF-1 oraz DF-4 – ich budowa jest bardzo zbliżona do IS-1/IS-4, nawet gołym okiem można jednak dostrzec pewną różnicę – wtyki DF-4 mają końcowy pin o zmniejszającej się skokowo średnicy, podczas gdy złączach IS-4 stopniowanie średnicy nie występuje (pin ma kształt walcowy). Na rysunku 15 pokazano spotykane w praktyce konfiguracje połączeń DF-4, w tym wersje mieszane (wyprowadzenia niskonapięciowe i defibrylacyjne w ramach tej samej elektrody).
Warto zwrócić uwagę na konstrukcję gniazd, współpracujących z wtykami IS i DF. Po wpięciu elektrody do gniazda (co odbywa się rzecz jasna na chwilę przed włożeniem stymulatora do loży podskórnej) konieczne jest zablokowanie złącza przed przypadkowym rozpięciem. W tym celu stosowane są samouszczelniające śruby, dociskające wtyk do kanału, wykonanego w bloku złączy. Niezwykle ważne jest jednak także uszczelnienie wlotu gniazda – wszechobecne płyny ustrojowe (głównie krew) mogą bowiem z łatwością penetrować wszelkie nieszczelności w konstrukcji urządzenia. Dlatego też producenci implantów aktywnych stosują wielopoziomowe uszczelnienia, a dodatkowo – każda uszczelka posiada dwie wargi, co zapewnia minimum redundancji, tak ważnej w technologii medycznej. W przypadku złączy IS-1 i DS-1 uszczelka jest wykonana przez zgrubienie na zewnętrznej izolacji elektrody, które współpracuje z odpowiednio ukształtowanym i niezwykle precyzyjnie spasowanym kanałem. Złącza IS-4 i DS-4 są jednak pozbawione własnych uszczelnień, a kształt części wpinanej do gniazda jest w przybliżeniu gładkim walcem. Dlatego też odpowiednie uszczelnienia muszą być wprowadzone bezpośrednio do gniazda – tutaj także stosuje się niezbędną redundancję uszczelek, zainstalowanych pomiędzy każdą parą styków oraz na wlocie gniazda. Konstrukcję gniazd pokazano na rysunku 16.
W prasie specjalistycznej od lat powraca debata na temat niezawodności poszczególnych typów złączy stymulacyjnych i defibrylacyjnych wykorzystywanych w implantach, zaś rozważania są poparte analizą znanych przypadków, w których awaria (utrata szczelności, poluzowanie śruby dociskowej, etc.) doprowadziła do określonych zagrożeń dla pacjenta – zwykle obserwowanych jako obniżenie skuteczności terapii lub zwiększenie poziomu szumów, rejestrowanych przez front-endy wejściowe urządzenia. Ponadto, spore znaczenie praktyczne ma… zgodność wymiarowa pomiędzy złączami stosowanymi przez poszczególnych producentów – nawet minimalne różnice w pasowaniu mogą prowadzić do powstawania nieszczelności połączenia (patrz rysunki 17 i 18).
Ogromne znaczenie dla niezawodności kontaktu elektrycznego pomiędzy elementami złączy urządzeń implantowalnych ma rodzaj zastosowanych w nich styków. Dla przykładu warto tutaj wskazać specjalne elementy dostępne w ofercie firmy Bal Seal Engineering – przykład pokazano na rysunku 19. Co ważne, zastosowanie odpowiednio ukształtowanej sprężynki na wewnętrznym obwodzie pierścienia umożliwia uzyskanie wielopunktowego, niezawodnego kontaktu, co dodatkowo redukuje ryzyko powstawania niepożądanych zakłóceń i zmian impedancji połączenia pod wpływem działania różnych czynników (np. niedokładności montażowych i rozrzutów produkcyjnych).
Aspekty sygnałowe kardiostymulatorów i kardiowerterów-defibrylatorów
Terapia bioelektryczna chorób serca wymaga stosowania sygnałów o parametrach amplitudowych i czasowych ściśle dostosowanych do wymogów, stawianych przez określone schorzenie. W tej części artykułu przyjrzymy się zatem najważniejszym parametrom, jakie muszą spełniać urządzenia (oraz ich kluczowe komponenty), aby mogły one skutecznie realizować powierzone zadanie kliniczne.
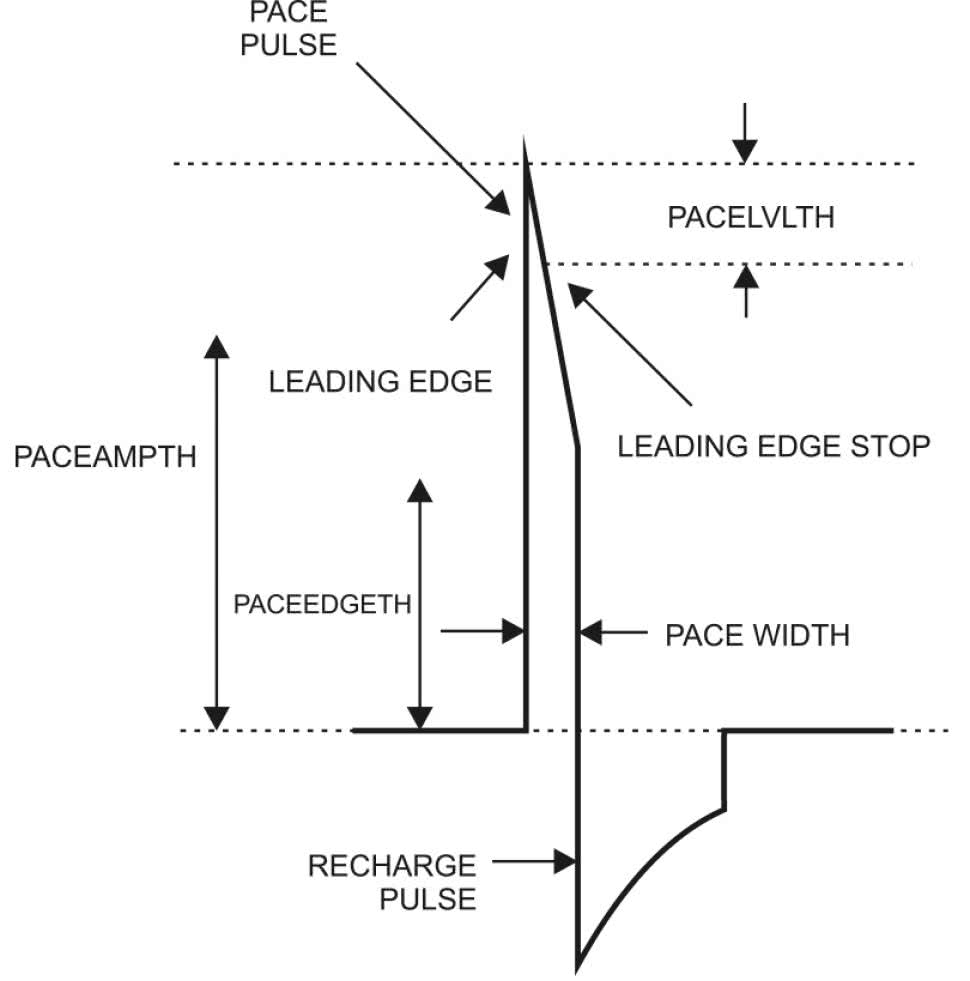
W przypadku sztucznych rozruszników serca typowy impuls ma kształt dwufazowy (rysunek 20) – „główna” część przebiegu wywołuje pożądany skurcz mięśnia sercowego, zaś następujący po niej, dłuższy impuls o znacznie niższej amplitudzie ma za zadanie (mówiąc w ogromnym uproszczeniu) „rozładować” pojemności tkanek serca w celu uniknięcia zjawiska polaryzacji DC. Typowa szerokość impulsu głównego to 400…600 µs, zaś amplituda to około 1,5…2,5 V. Warto jednak zwrócić uwagę, że rzeczywiste parametry u danego pacjenta są zależne od szeregu czynników, w tym przede wszystkim od miejsca implantacji i związanej z tym pobudliwości mięśnia na stymulację w danym punkcie. Podczas programowania rozrusznika ustala się zatem optymalne nastawy czasu i amplitudy, stąd też producenci kardiostymulatorów oferują dość szerokie zakresy tych parametrów – przykładowo, rozruszniki z serii Effecta marki Biotronik mogą pracować z amplitudami ustawianymi w zakresie od 200 µV do 7,5 V i szerokościami impulsów od 100 µs do 1,5 ms. Warto dodać, że współczesne kardiostymulatory umożliwiają automatyczne ustawianie, a także bieżącą korekcję amplitudy, co pozwala na kompensację zmian impedancji, wynikających z progresji narostu tkanek wokół katody.
Osobnym zagadnieniem jest czułość, wyrażana w miliwoltach – oznacza ona nic innego, jak tylko próg napięcia o określonej polaryzacji, którego przekroczenie (przez potencjały wewnątrzsercowe) zostanie zinterpretowane przez rozrusznik jako załamek P (depolaryzacja przedsionka) lub R (depolaryzacja komory). „Książkowa” wartość czułości przy zastosowaniu konfiguracji unipolarnej wynosi 2,5 mV (wg normy EN 45502-2-1) – zbyt niski próg prowadzi do zjawiska określanego mianem oversensing (stymulator reaguje na artefakty, interpretując je jako oczekiwaną aktywność danej jamy), zaś zbyt wysoki – undersensing (stymulator pozostaje nieczuły na aktywność m. sercowego, na którą powinien zareagować). W przypadku wspomnianej serii Effecta (Biotronik) czułość można ustawić w zakresie od 100 µV do nawet 7,5 mV.
Oprócz amplitudy i szerokości impulsów, klinicznie istotne są także liczne parametry czasowe, związane z synchronizacją poszczególnych impulsów. Programowalne są zatem takie parametry, jak maksymalna częstość akcji serca w poszczególnych scenariuszach pracy (np. według zegara czasu rzeczywistego – rozróżnienie dzień/noc), opóźnienie AV (maksymalny czas pomiędzy wykryciem aktywności lub stymulacją przedsionka, a wyzwoleniem impulsu stymulującego komorę), czy też tzw. okresy refrakcji i wygaszania (ang. blanking) dla poszczególnych jam serca, określające (mówiąc w dużym uproszczeniu) czasową dezaktywację sensingu w poszczególnych kanałach po wystąpieniu w nich określonego „zdarzenia”. Ponieważ jednak szczegółowe wyjaśnienie znaczenia tych parametrów wymagałoby zagłębienia się w elektrofizjologię mięśnia sercowego oraz dokładnego omówienia poszczególnych trybów stymulacji, dlatego wspomnianych zagadnień nie będziemy szerzej omawiać na łamach niniejszego artykułu – zainteresowanych odsyłamy do bibliografii, znajdującej się na końcu tekstu.
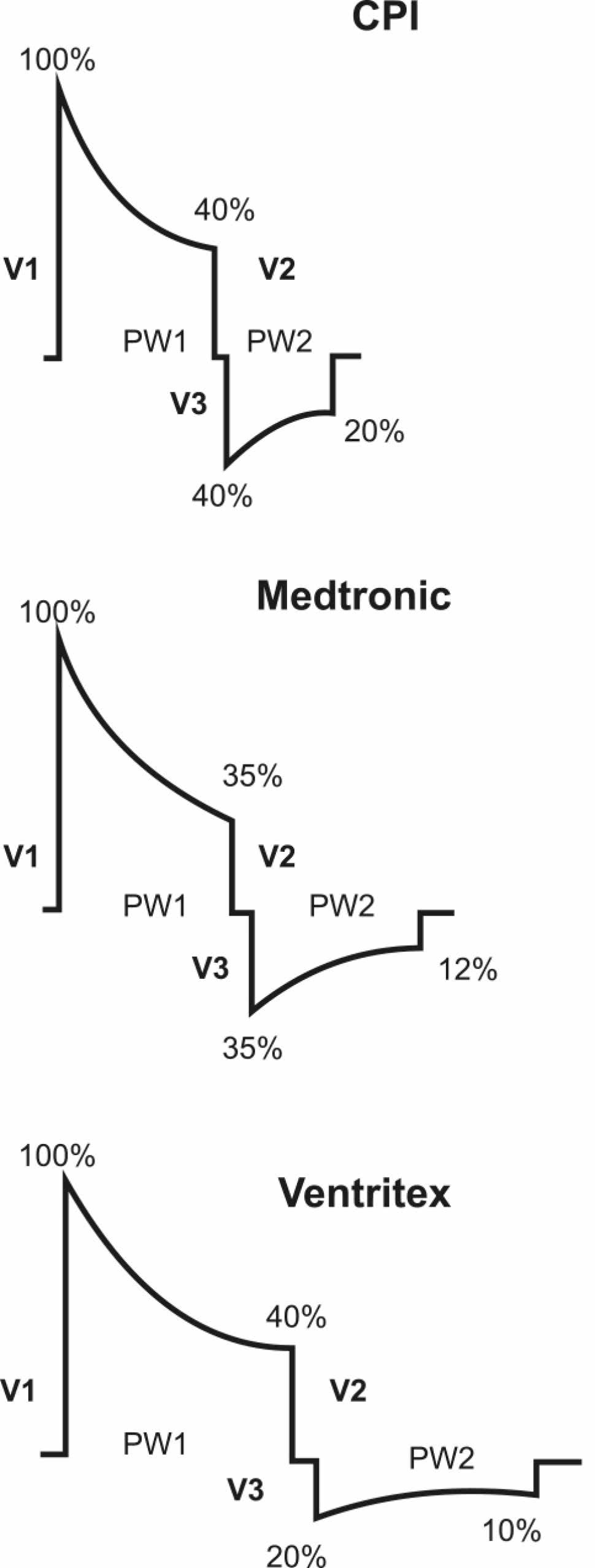
W przypadku wszczepialnych kardiowerterów-defibrylatorów podstawowym parametrem jest energia wstrząsu, dostarczanego przez wysokonapięciowe elektrody do mięśnia sercowego, wyrażana w dżulach [J]. Impulsy stosowane we współczesnych ICD mają najczęściej postać dwufazową (rysunek 21) i w typowych warunkach dostarczają energię na poziomie od kilku do kilkunastu J.
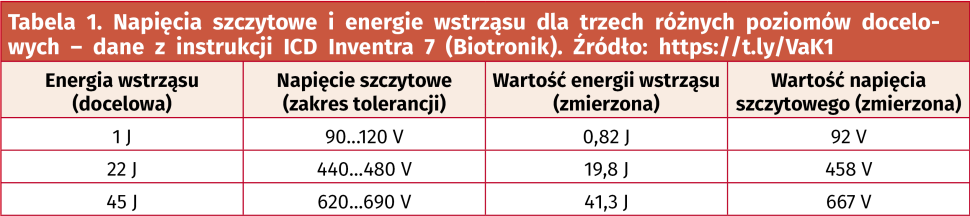
Większość kardiowerterów-defibrylatorów oferuje energię maksymalną na poziomie do 35 J, zaś w przypadku modeli określanych jako ultra-high energy górną granicą może być nawet wartość 42 J. Uzyskanie tak dużej ilości energii jest możliwe dzięki zastosowaniu przetwornicy typu flyback, podwyższającej napięcie baterii (rzędu 2,8...3,2 V) do kilkuset woltów, przy czym warto wiedzieć, że narastające zbocze impulsu terapeutycznego może wiązać się z przepływem prądu na poziomie nawet kilkunastu amperów (!). Wartości energii odpowiadającej określonym napięciom szczytowym można znaleźć w materiałach producentów – przykładowe dane dla ICD z serii Inventra 7 marki Biotronik podano w tabeli 1.
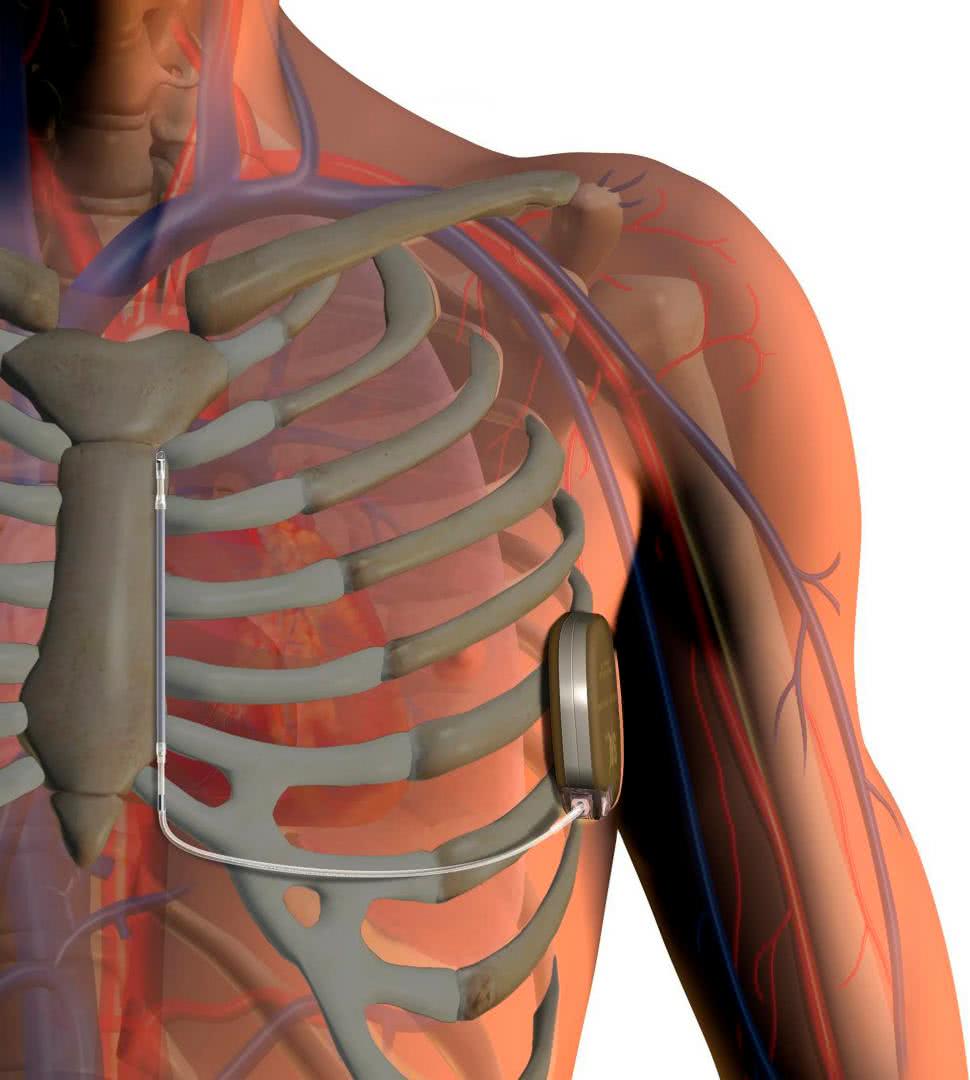
Warto dodać, że od niedawna w użytku są także defibrylatory typu S-ICD (subcutaneous ICD). Od klasycznych kardiowerterów-defibrylatorów różnią się one przede wszystkim rodzajem elektrody, która zamiast śródsierdziowo, implantowana jest podskórnie, wzdłuż lewego brzegu mostka (rysunek 22). Z uwagi na znacznie wyższą impedancję, wprowadzaną przez warstwy mięśni, osierdzie, etc. (w porównaniu do impedancji widzianej przez elektrody ICD wszczepione przeznaczyniowo), konieczne jest użycie wyższych poziomów energii defibrylacji na poziomie do 80 J – choć, z uwagi na brak bariery skórnej – jest to i tak 4…5-krotnie niższa energia w por. do stosowanych w medycynie ratunkowej i intensywnej terapii defibrylatorów zewnętrznych. Urządzenia S-ICD są stosowane u pacjentów, którzy z pewnych przyczyn (np. w związku z anatomicznymi patologiami naczyniowymi lub ogólnym stanem zdrowia) nie mogą być poddani implantacji klasycznego ICD.
Dodatkowe funkcje stymulatorów i kardiowerterów-defibrylatorów
Producenci implantów aktywnych dokładają wszelkich starań, by – już po zakończeniu procedury implantacji – możliwe było dokonywanie niezbędnych korekt parametrów terapii, okresowych przeglądów i diagnostyki ewentualnych problemów. Wymiana lub usunięcie urządzenia wiąże się bowiem nieodłącznie z koniecznością reoperacji, co sprawia, że wszystkie możliwości oferowane przez zewnętrzne programatory są od zawsze w cenie. Mało tego – miniaturyzacja pamięci półprzewodnikowych i opracowanie kolejnych generacji energooszczędnych układów sterujących umożliwiło wprowadzenie do implantów rozbudowanych funkcji rejestracji epizodów zaburzeń rytmu serca, które w doskonałej jakości mogą być odtworzone przez lekarza i zbadane w celu szczegółowej oceny. Zapis krótkich, zwykle około 10-sekundowych fragmentów elektrogramu, umożliwia wprowadzenie niezbędnych zmian w parametrach elektroterapii, czy też towarzyszącej jej farmakoterapii.


Programowanie
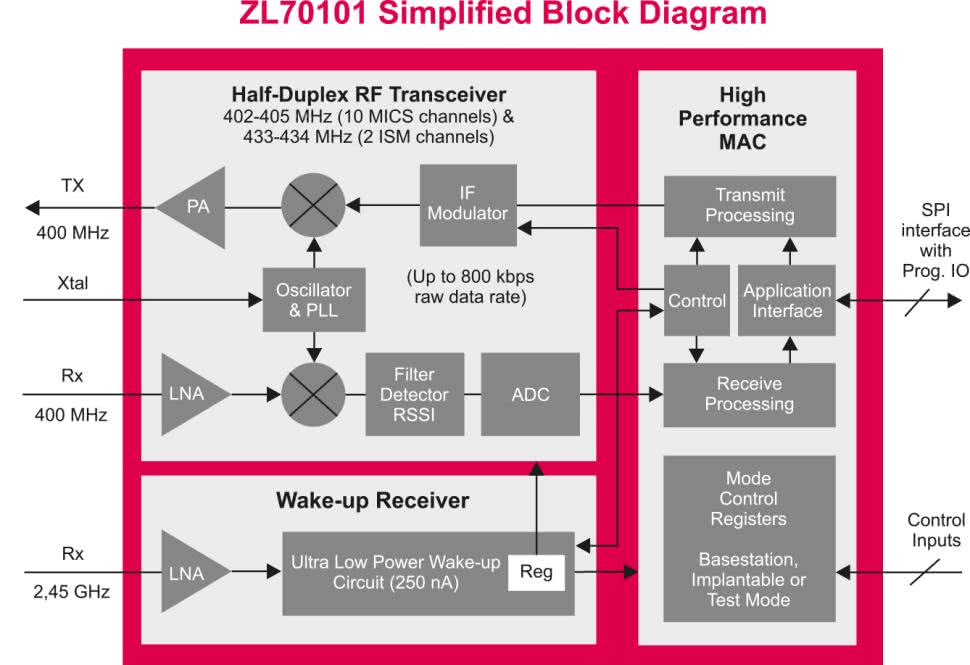
Programowanie parametrów urządzenia – dawniej przeprowadzane za pośrednictwem cewki indukcyjnej przykładanej w okolicę miejsca implantacji – dziś zostało zdominowane przez krótkozasięgowe łącza radiowe. Ustawianie i kontrola parametrów stymulatora oraz odczyt rozbudowanego pakietu danych diagnostycznych (dotyczących tak samego urządzenia, jak i fizjologii pacjenta) jest podstawową funkcjonalnością wszystkich współczesnych implantów elektrokardiologicznych. Standardem komunikacyjnym, który ukształtował dzisiejszy świat elektroniki implantowalnej, jest MICS – Medical Implant Communication System – opracowany przez FCC w 1999 roku i „wchłonięty” przez nowszy, udostępniony 10 lat później standard MedRadio (Medical Device Radiocommunications Service). Pierwszy z nich opierał się na paśmie 402–405 MHz, drugi rozszerzył je o 1 MHz z każdej strony. Kolejne edycje uzupełniły całość o podzakres pasma S, wykorzystywany w sieciach MBAN (Medical Body Area Network) – 2360–2400 MHz, a także o kolejne 24 megaherce w podprzedziałach 413–419 MHz, 426–432 MHz, 438–444 MHz oraz 451–457 MHz. Z biegiem czasu na rynku pojawiły się nawet dedykowane do celów medycznych transceivery scalone, np. układ ZL70101 (rysunek 24), intensywnie wykorzystywany m.in. przez firmę Biotronik w zastosowaniach telemetrycznych. Transceiver zapewnia dwukierunkową komunikację w paśmie 400 MHz oraz dodatkowy front-end 2,45 GHz, umożliwiający wybudzanie układu ze stanu uśpienia przez zewnętrzny kontroler.
Telemetria
Telemetria umożliwia zdalną kontrolę parametrów pracy stymulatora lub kardiowertera-defibrylatora i coraz częściej stanowi ważny element telemedycznej opieki nad pacjentem kardiologicznym. Dawniej wprowadzane były rozwiązania stacjonarne, takie jak Merlin@Home marki St. Jude Medical (przejętej przez koncern Abott) – patrz fotografia 14.

Urządzenie – do dziś dostępne w ofercie producenta – umożliwia zdalny odczyt danych przez lekarza, przy użyciu utrzymywanej przez Abott platformy Merlin.net™ Patient Care Network. Informacje zebrane z implantu są przesyłane poprzez łącze telefoniczne, co z jednej strony zapewnia łatwość instalacji i zwiększa dostępność dla osób starszych, z drugiej – ogranicza możliwość używania transmittera przez pacjenta jedynie do czasu, w którym przebywa on w domu.
Nowsze rozwiązania korzystają z podejścia, które dziś – w dobie IoT, czy nawet IoE – chyba nikogo już nie dziwi: łącze Bluetooth Low Energy umożliwia komunikację z rozrusznikiem lub ICD przy użyciu dowolnego urządzenia mobilnego, rzecz jasna w powiązaniu z przeznaczoną do tego celu aplikacją mobilną. Jako przykład należy tutaj wskazać technologię BlueSync, opracowaną przez markę Medtronic – przesył informacji odbywa się z użyciem silnego szyfrowania w standardzie NIST, zaś w roli bramy sieciowej może wystąpić nie tylko smartfon lub tablet pacjenta, lecz także specjalne urządzenie – MyCareLink Relay™ (fotografia 15), które pod odebraniu danych z implantu może przesłać je za pomocą sieci WiFi albo połączenia LTE.

Kontrola impedancji
Automatyczna kontrola impedancji pozwala na zaawansowaną diagnostykę jakości kontaktu elektrod z tkanką miokardium i stanowi jedną z podstawowych funkcji współczesnych implantów kardiologicznych. W tym celu generator jest przestawiany w tryb niskiej amplitudy, wytwarzając impulsy podprogowe, których poziom jest zbyt niski, aby wywołać skutki fizjologiczne (skurcz mięśnia sercowego), ale wystarczający do sprawdzenia, czy impedancja tkanek widziana od strony wyjścia urządzenia mieści się w dopuszczalnym przedziale. Dane na temat impedancji są nie tylko wykorzystywane przez procesor urządzenia – mogą być także odczytywane przez lekarza w trakcie rutynowej kontroli działania implantu, a co więcej – w niektórych przypadkach nawet wysyłane za pomocą łącza telemetrycznego.
IEGM
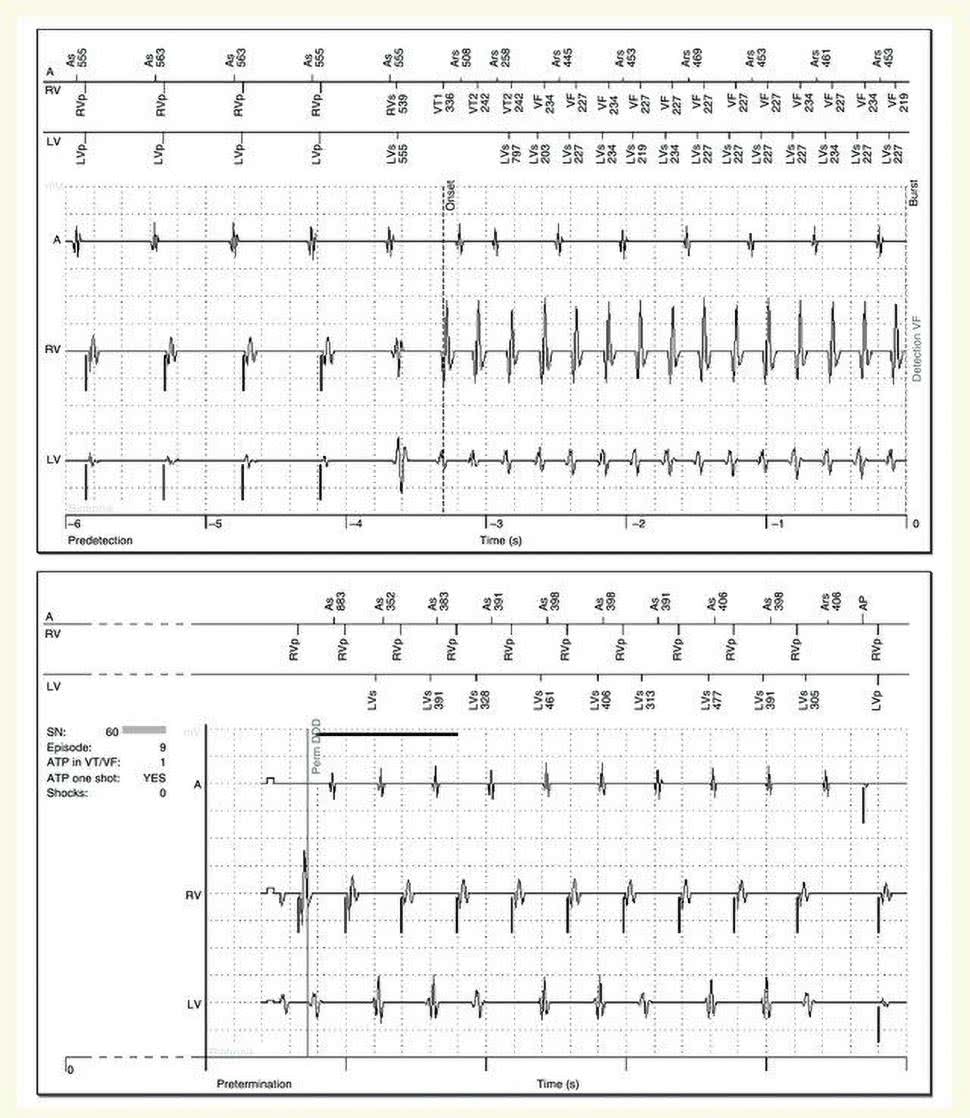
IEGM (ang. intracardiac electrogram) to inaczej zapis wewnątrzsercowego elektrogramu, czyli spontanicznej aktywności serca rejestrowanej przez front-end wejściowy (kanały sensingu). Funkcja odczytu IEGM jest niezwykle użyteczna, pozwala bowiem lekarzowi zobaczyć dokładnie to, co „widzi” rozrusznik za pomocą wszczepionych elektrod. Współczesne urządzenia są w stanie rejestrować zapisy IEGM z wysoką rozdzielczością, co daje niespotykane wcześniej możliwości zaawansowanego „debuggowania” urządzeń po wszczepieniu w ciało pacjenta oraz szczegółowego określania charakteru wykrytych zaburzeń serca (np. arytmii) – patrz rysunek 25.
Autoregulacja rytmu względem aktywności fizycznej
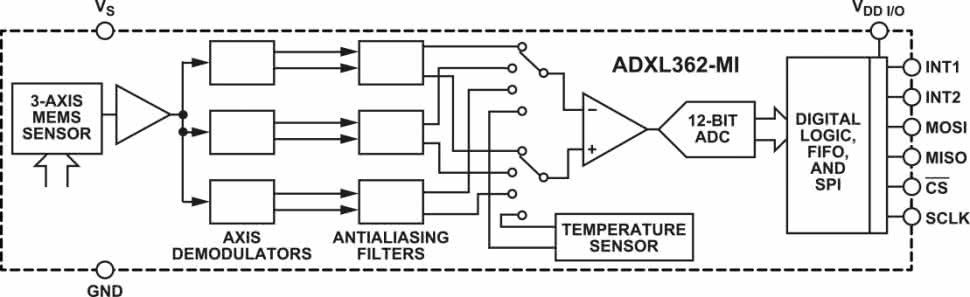
Fizjologiczną reakcją organizmu na wysiłek fizyczny lub stany emocjonalne jest przyspieszenie częstości akcji serca. W przypadku „awarii” naturalnego rozrusznika (węzła zatokowo-przedsionkowego) odpowiedzialność za ten parametr spoczywa na kardiostymulatorze – generowanie impulsów ze stałą częstotliwością uniemożliwiałoby bowiem właściwe ukrwienie organów wewnętrznych i mięśni szkieletowych (co było zresztą jedną z głównych wad stymulatorów w pierwszych dwóch dekadach ich rozwoju). Dziś regulacja rytmu sterowana przez sygnał z wbudowanego akcelerometru jest standardem we współczesnych rozrusznikach. Rzecz jasna, koniecznością jest tutaj zastosowanie niskomocowego czujnika, który nie nadweręży budżetu energetycznego urządzenia. Firma Analog Devices opracowała czujnik spełniający to wymaganie – układ ADXL362-MI (rysunek 26) pobiera zaledwie 1,8 µA prądu zasilania podczas pomiaru z częstotliwością próbkowania równą 100 Hz, zaś w trybie aktywacji ruchem – zaledwie 270 nA. Jest to zresztą jeden ze stosunkowo niewielu układów, przeznaczonych explicite do urządzeń implantowalnych, czy w ogóle do wyrobów medycznych klasy III (tematyka metod doboru komponentów do takich aplikacji nadawałaby się zresztą co najmniej na osobny artykuł).
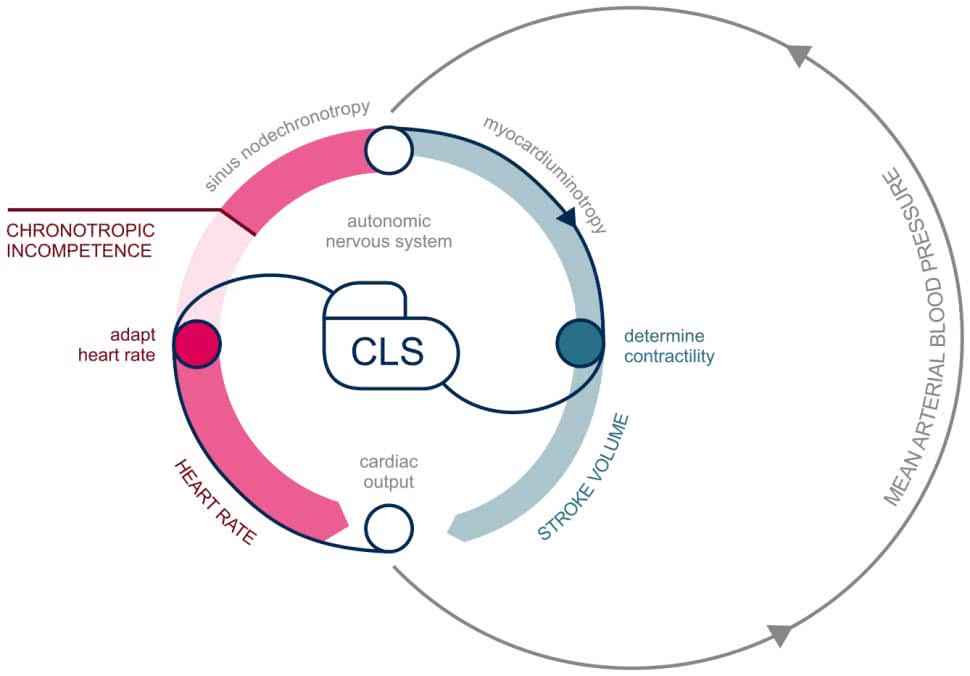
Warto dodać, że interesującą technologię – wykraczającą dalece poza (dość proste) dopasowywanie szybkości stymulacji do zapisów z akcelerometru – opracowała firma Biotronik w ramach funkcjonalności, określanej jako CLS – Closed Loop Stimulation. Jak sama nazwa wskazuje, regulacja rytmu odbywa się w zamkniętej pętli sprzężenia zwrotnego, zaś sygnałem wejściowym dla algorytmu jest impedancja, mierzona w czasie rzeczywistym, w każdym cyklu pracy serca (rysunek 27). Technologia opiera się na wykorzystaniu tzw. regulacji inotropowej – kurczliwość mięśnia sercowego (której zmiany mają swoje odzwierciedlenie także w jego impedancji, mierzonej unipolarnie przez elektrodę komorową) – jest regulowana przez centralny układ nerwowy, w odpowiedzi na czynniki, które w prawidłowej fizjologii prowadzą do przyspieszenia akcji serca. Z tego też względu technologia CLS działa nie tylko podczas zwiększonego wysiłku fizycznego, ale także pobudzenia emocjonalnego, dzięki czemu stymulacja ma charakter znacznie bardziej zbliżony do naturalnego rytmu zatokowego.
Tryb magnesu
Magnet mode – czyli tryb magnetyczny lub tryb magnesu – jest niezmiennie stosowany od kilku dekad zarówno w rozrusznikach serca, jak i kardiowerterach-defibrylatorach. Zbliżenie magnesu stałego (fotografia 16) do wszczepionego urządzenia powoduje przejście w bezpieczny tryb terapii, nieczuły na zakłócenia w kanałach sensingu (np. na artefakty wynikające z użycia noży elektrochirurgicznych w trakcie operacji). Choć dokładne funkcjonowanie urządzenia zależy od jego modelu oraz nastaw wgranych przez lekarza, to ogólna zasada jest następująca: w rozrusznikach dezaktywowane są kanały wejściowe służące do detekcji spontanicznej aktywności serca (co oznacza włączenie trybu asynchronicznego, np. AOO, VOO czy DOO), zaś w urządzeniach typu ICD dezaktywowana jest funkcja wstrząsów terapeutycznych (przy pozostawieniu działania ewentualnych funkcji rozrusznika).

Warto w tym miejscu dodać, że tryb magnetyczny (aktywowany automatycznie po wykryciu pola magnetycznego przekraczającego określoną wartość indukcji progowej, np. 1,5 mT) nie stanowi wystarczającego zabezpieczenia przed wpływem pól obecnych podczas badania pacjenta metodą rezonansu magnetycznego (MRI). Przed rozpoczęciem badań obrazowych urządzenie powinno być bowiem przestawione przez kardiologa w specjalny tryb pracy za pomocą zewnętrznego programatora. Kwestia kompatybilności implantów z MRI jest ponadto zagadnieniem znacznie szerszym – urządzenia dopuszczone warunkowo do pracy w środowisku pól magnetycznych obecnych w gantrze tomografu MRI (określane jako MRI-conditional) muszą być bowiem od początku do końca zaprojektowane i przebadane pod kątem bezpieczeństwa. Co ciekawe, wbrew pozorom to nie silne, stałe pole magnetyczne nadprzewodzącego elektromagnesu jest tutaj czynnikiem krytycznym – znacznie bardziej groźne dla implantu (a więc także samego pacjenta) są bowiem szybkozmienne pola cewek gradientowych oraz promieniowanie elektromagnetyczne (RF), które nie tylko mogłyby z łatwością zakłócić pracę obwodów urządzenia, ale także doprowadzić do nieakceptowalnego przegrzania obudowy lub wywołać mechaniczne drgania komponentów wewnętrznych.
Konstrukcja obudowy
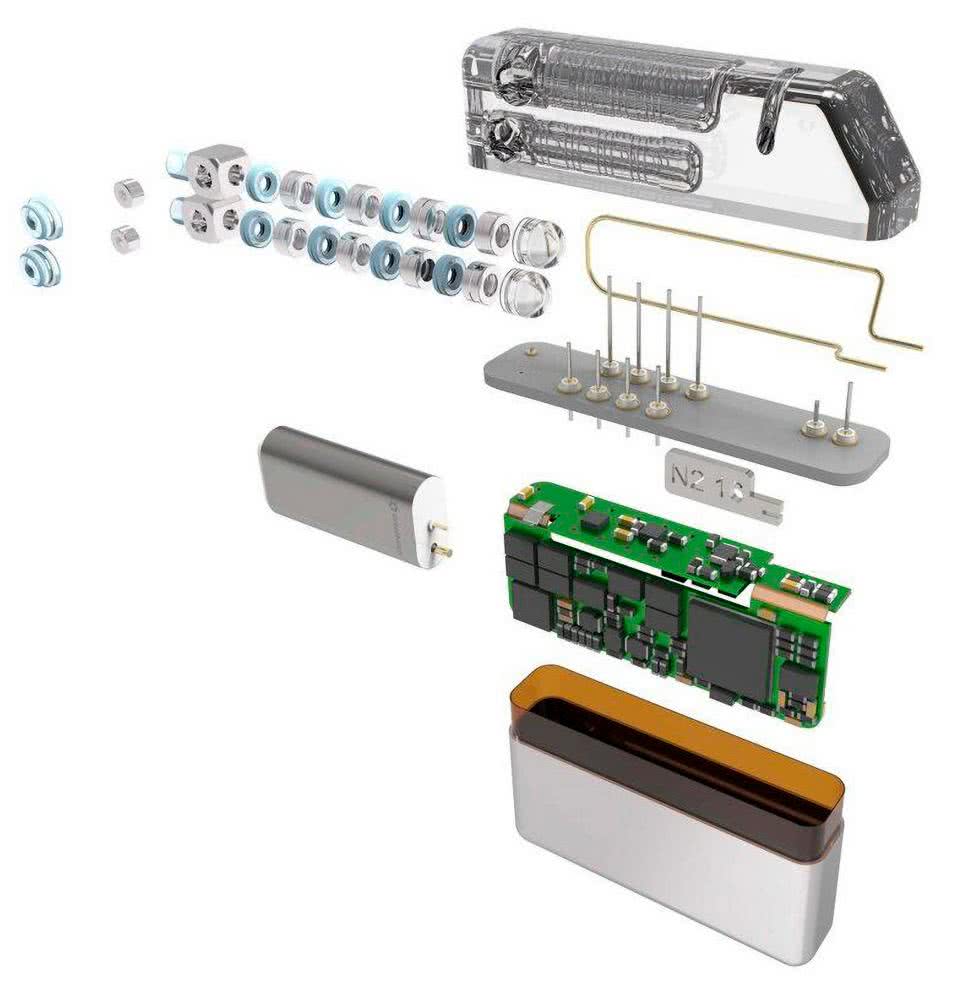
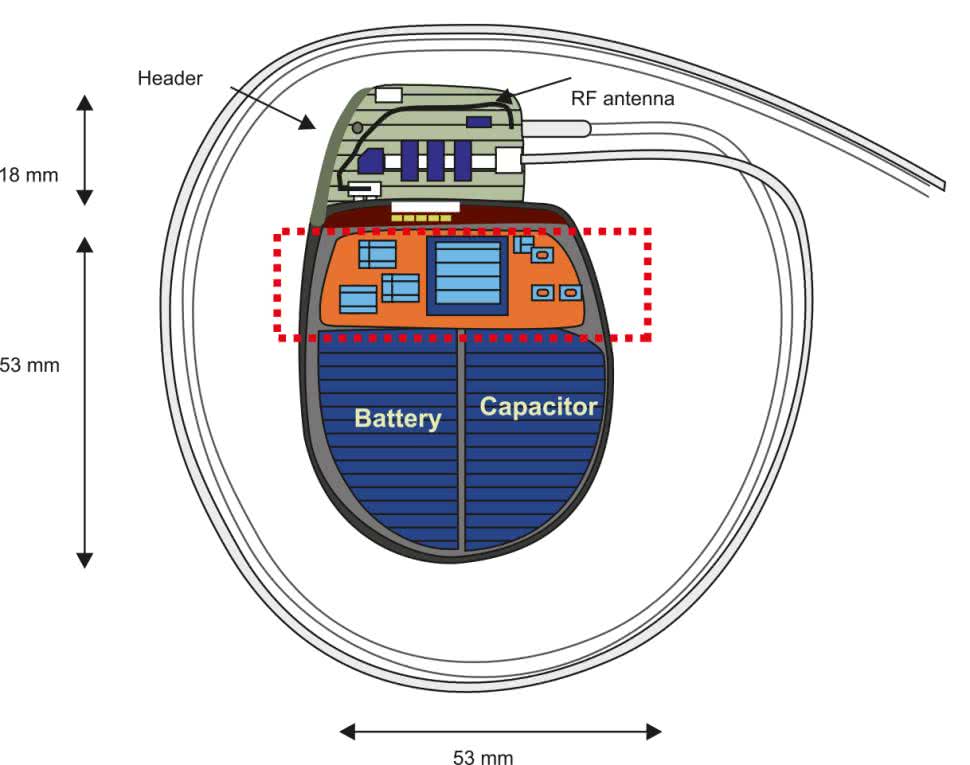
Hermetyczna, biozgodna, niemagnetyczna obudowa implantu jest jednym z kluczowych aspektów w kwestii bezpieczeństwa oraz niezawodności urządzenia. Od wielu lat standardem jest umieszczanie urządzeń implantowalnych w lekkich, biokompatybilnych obudowach tytanowych. Ich budowa opiera się zwykle na konstrukcji dwuczęściowej – w jednej z precyzyjnie wyprofilowanych pokryw umieszczana jest płytka drukowana (zwykle wykonywana w formie sztywno-giętkiej) wraz z zasilaniem (baterią i – w przypadku ICD – kondensatorem wysokonapięciowym) oraz specjalnym, hermetycznym przepustem (fotografia 17), służącym do połączenia ze stykami, znajdującymi się w bloku złączy elektrod (określanym często mianem header).
Po dociśnięciu pokryw są one następnie spawane laserowo (rysunek 28), zaś na przedniej części wykonuje się oznakowania za pomocą laserowej grawerki CNC (fotografia 18).
Do odizolowania wewnętrznej powierzchni obudowy od znajdującej się w niej elektroniki producenci powszechnie używają osłony kaptonowej, co zresztą nie dziwi z uwagi na doskonałe właściwości dielektryczne tego materiału. Typową konstrukcję przykładowego stymulatora wszczepialnego pokazano na rysunku 29.
Osobnym zagadnieniem jest produkcja bloku złączy. W tym przypadku istnieje kilka możliwych technik wykonania, zaś sam proces stanowi przedmiot szeregu międzynarodowych patentów. Jedną z możliwości jest umieszczenie elementów przewodzących (styków i wyprowadzeń) na specjalnych rdzeniach w formie wtryskowej – po wykonaniu wtrysku rdzenie są usuwane, pozostawiając puste kanały, do których wsuwane będą złącza elektrod. Blok złączy, wykonany z tworzywa sztucznego, okazuje się ponadto doskonałym miejscem do zainstalowania anteny, co zobrazowano na rysunku 30.
Baterie
Pierwsze rozruszniki z zasilaniem akumulatorowym stwarzały nieakceptowalne ryzyko w przypadku, gdyby pacjent zapomniał (lub z jakichś względów nie mógł) doładować urządzenia – u osób „zależnych” od rozrusznika (pacemaker-dependent) rozładowanie źródła zasilania stanowiłoby wszak śmiertelne zagrożenie. Między innymi z tego względu szybko rozpoczęto poszukiwania baterii, które byłyby w stanie sprostać potrzebom, stawianym przed inżynierami przez technologię urządzeń implantowalnych.

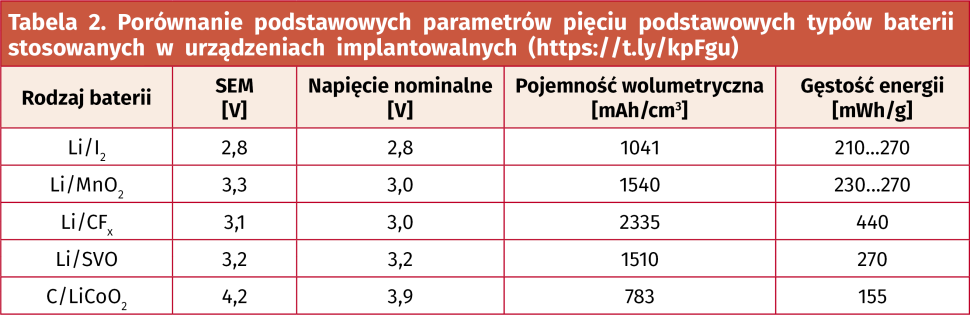
Ze względów bezpieczeństwa współczesne baterie są wykonywane w hermetycznych obudowach (fotografia 19), przy czym metalowa puszka jest zwykle połączona galwanicznie z jedną z elektrod (często z anodą, choć nie jest to uniwersalna reguła). Podsumowanie najważniejszych parametrów pięciu typów baterii stosowanych w urządzeniach wszczepialnych zestawiono w tabeli 2.
Dość szybko po stworzeniu pierwszych kardiostymulatorów opracowane zostały baterie litowo-jodowe, określane skrótowo Li/I2, a ściślej rzecz ujmując – Li/I2-PVP, w których katoda jest wykonana z kompleksu jodu i poli-2-winylopirydyny. Do głównych zalet tego rodzaju ogniw należy bardzo wysoki poziom bezpieczeństwa (potwierdzony przez bezproblemową eksploatację w milionach urządzeń przez kilka ostatnich dekad) oraz doskonała wolumetryczna gęstość energii na poziomie 1,0 Wh/cm³. Baterie Li/I2-PVP nie nadają się jednak do urządzeń o zwiększonym poborze mocy, niezależnie od tego, czy ma on miejsce tylko okazjonalnie (np. w kardiowerterach-defibrylatorach), czy też fazy wyższego zapotrzebowania na moc są dłuższe (np. we wszczepialnych pompach infuzyjnych). Warstwa jodku litu (LiI), pełniąca rolę separatora oraz stałego elektrolitu, ma bowiem silną tendencję do zwiększania grubości w miarę rozładowywania ogniwa, co prowadzi do znacznego wzrostu impedancji wewnętrznej (choć istnieje możliwość ograniczenia tego efektu przez pokrycie litowej anody warstwą poliwinylopirydyny – amerykański patent W. Greatbatcha nr 3957533).
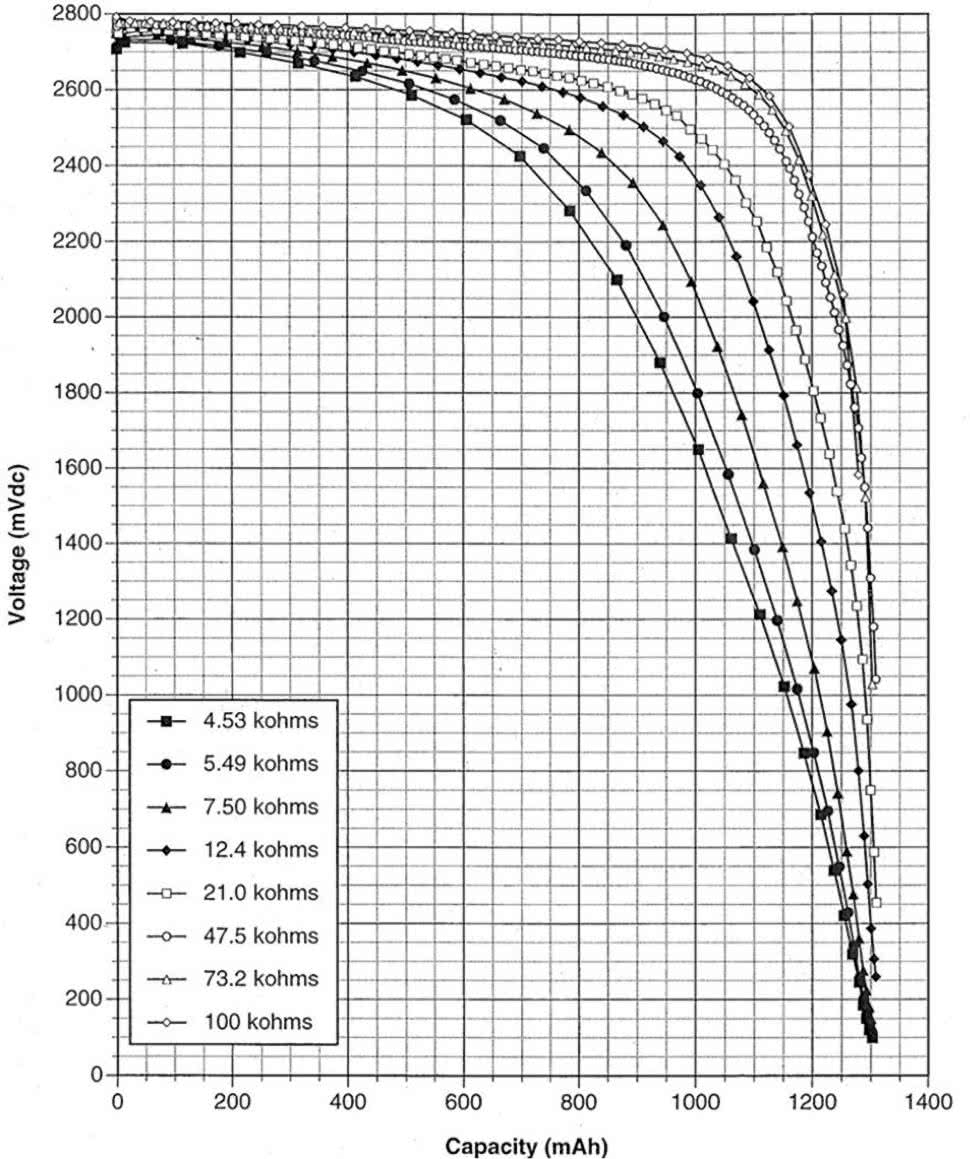
Z uwagi na tradycyjny już zakres zastosowań baterii litowo-jodowych – zdecydowanie najczęściej można je znaleźć w rozrusznikach – producenci podają zwykle charakterystyki rozładowania dla stałego obciążenia rezystancją 100 kΩ. Nie ma w tym jednak nic dziwnego – większość kardiostymulatorów operuje właśnie w zakresie prądu (uśrednionego) w zakresie kilku… kilkunastu µA, zaś zwiększanie obciążenia bardzo szybko obniża napięcie ogniwa – patrz rysunek 31.
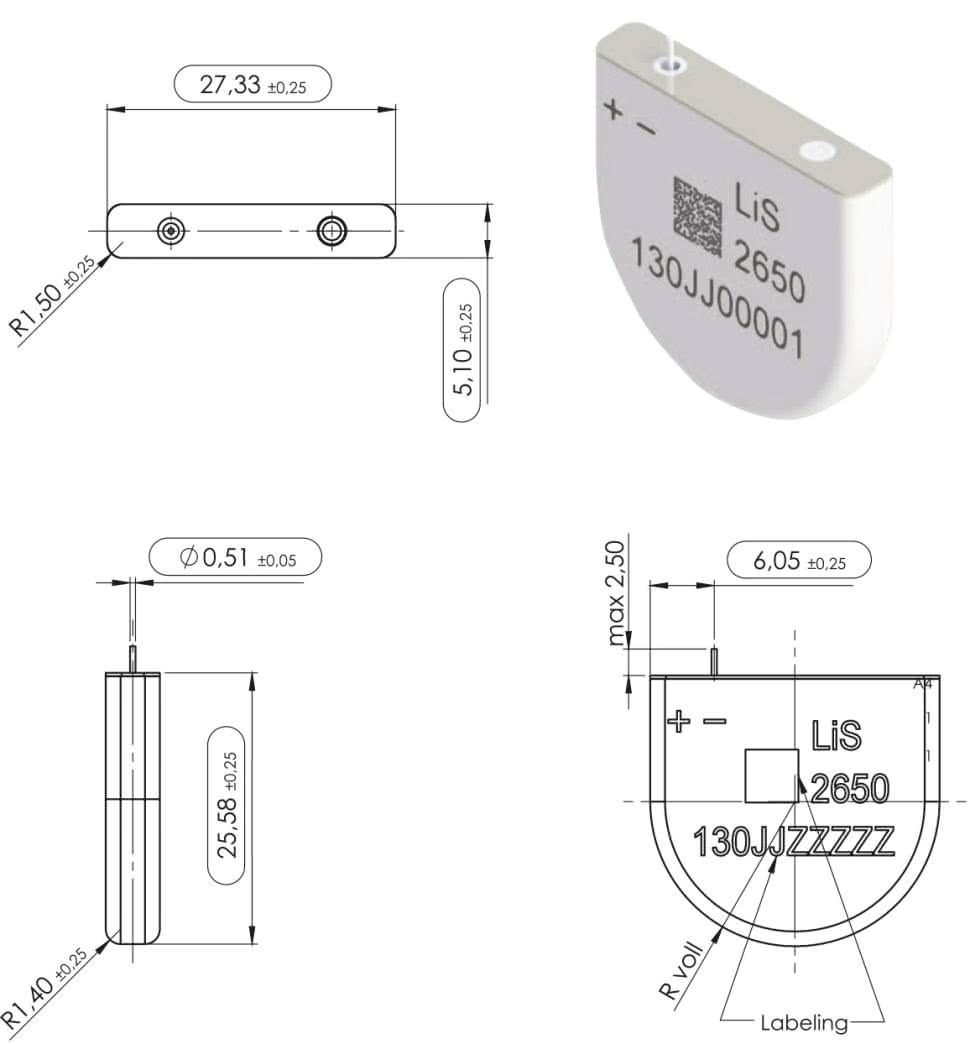
Przykładową baterię „katalogową” – LiS 2650 marki Litronik – pokazano na rysunku 32. Metalowa puszka, z jednej strony tradycyjnie zaokrąglona, ma wymiary całkowite 27,33×25,58×5,1 mm, co daje łączną objętość 2,7 cm³. Nominalne napięcie ogniwa to 2,8 V, pojemność dla rozładowania rezystancją 100 kΩ wynosi 1,21 Ah, zaś poziom samorozładowania nie przekracza 7% dla 10-letniego okresu użytkowania.
Urządzenia o większym zapotrzebowaniu energetycznym często korzystają z baterii litowych wykonanych na bazie tlenku manganu (IV) – Li/MnO2. Oferują nieco wyższe napięcie nominalne (3,0…3,2 V) i o połowę wyższą pojemność wolumetryczną, choć gęstość energii jest bardzo zbliżona do baterii litowo-jodowych. Zaletą ogniw Li/MnO2, która dyskwalifikuje źródła na bazie jodu w aplikacjach takich jak ICD, jest zdolność do pracy z impulsami prądowymi rzędu kilku amperów, co ma niebywałe znaczenie dla procesu ładowania kondensatorów za pomocą przetwornic podwyższających napięcie. Baterie Li/MnO2 występują w wersjach zoptymalizowanych zarówno dla urządzeń o średnim, jak i dużym poborze mocy, a przewidywana żywotność wynosi zwykle do 10 lat.
Baterie litowe mogą także mieć katodę wykonaną w oparciu o wysokostabilną strukturę monofluorku węgla (Li/Cfx). Takie rozwiązanie oferuje niską impedancję wewnętrzną, przewidywalną charakterystykę rozładowania (pozwalającą w prosty sposób określać pozostałą pojemność ogniwa na podstawie jego napięcia) oraz bardzo wysoką pojemność i gęstość energii. Źródła Li/Cfx są wykorzystywane m.in. w zaawansowanych kardio- i neurostymulatorach oraz wszczepialnych pompach infuzyjnych.
W zakresie urządzeń o dużym zapotrzebowaniu energetycznym i wysokiej mocy chwilowej (szczególnie ICD) sporą popularność zyskały baterie z katodą wykonaną na bazie związku srebra, wanadu i tlenu (Ag2V4O11). Ogniwa Li/SVO oferują parametry nieco zbliżone do Li/MnO2 – pojemność wolumetryczna wynosi około 1300...1500 mAh/cm³, zaś samorozładowanie przebiega z szybkością około 2%/rok. Napięcie znamionowe jest równe 3,2 V. Warto dodać, że w ramach poszukiwania jeszcze wydajniejszych źródeł energii dla urządzeń implantowalnych, liczne badania zostały skierowane na tory źródeł hybrydowych, łączących monofluorek węgla z SVO, co doprowadziło do stworzenia ogniw określanych jako Li/CFx – SVO – chętnie wykorzystywanych w konstrukcjach ICD, produkowanych m.in. przez markę Biotronik.
Nie sposób pominąć jednak udziału bardziej konwencjonalnych technologii elektrochemicznych, w tym baterii i akumulatorów litowo-jonowych. Dość powiedzieć, że wspomniane w artykule rozruszniki z serii Micra marki Medtronic bazują właśnie na takich źródłach zasilania, choć z powodu ograniczeń wymiarowych nie mamy tutaj do czynienia z bateriami stanowiącymi osobne komponenty – ogniwo zostało zintegrowane bezpośrednio z obudową urządzenia. Akumulatory, choć ze względów bezpieczeństwa nie są wykorzystywane w urządzeniach podtrzymujących i ratujących życie (rozrusznikach i kardiowerterach-defibrylatorach), można jednak spotkać w niektórych implantach – takich, jak neurostymulatory, których przerwa w funkcjonowaniu nie stanowi dla pacjenta bezpośredniego, śmiertelnego ryzyka.
Podsumowanie
Technologie wykorzystywane w urządzeniach implantowalnych stanowią mariaż dorobku kilku pokoleń inżynierów elektroników, specjalistów w zakresie materiałoznawstwa, mechaniki, elektrochemii, informatyki i oczywiście lekarzy, którzy nadzorowali (a najczęściej też inicjowali) prace nad kolejnymi przełomowymi rozwiązaniami. Wymogi bezpieczeństwa i niezawodności są tutaj wyśrubowane do maksimum, gdyż pozornie niewielkie usterki mogą z łatwością doprowadzić do śmierci pacjentów albo przynajmniej poważnego uszczerbku na zdrowiu.
Przez wiele lat wyścig na rynku implantów kardiologicznych odbywał się na polach wydłużania czasu pracy urządzeń, dopracowywania algorytmów sterujących stymulacją lub wstrząsami terapeutycznymi, wprowadzania coraz bardziej „fizjologicznych” metod stymulacji oraz – rzecz jasna – miniaturyzacji formy urządzeń w celu zwiększenia wygody pacjentów i poprawienia efektu estetycznego. Ostanie lata przyniosły jednak szereg innowacji, które rzucają nowe światło na rynek implantów aktywnych – rozruszniki implantowane w całości wewnątrz jam serca i wykorzystujące detekcję drgań mechanicznych zamiast elektrod przedsionkowych to rozwiązania całkowicie nowe, znacznie podwyższające poprzeczkę tak z rynkowego, jak i technologicznego punktu widzenia.
Ograniczenia są jednak nieubłagane – inżynierowie wciąż walczą z granicami żywotności baterii, co od czasu do czasu budzi dyskusję na temat przyszłościowych metod zasilania implantów. Uwaga naukowców w tym zakresie jest skierowana przede wszystkim na technologie odzyskiwania energii (energy harvesting) – z przemian biochemicznych, gradientów temperatury, czy nawet drgań generowanych przez serce oraz mięśnie szkieletowe pacjenta. Optymizm, jak zawsze, należy jednak trzymać w ryzach – doświadczenie pokazuje bowiem, że w praktyce najlepiej bronią się rozwiązania sprawdzone „w boju”, choć często znacznie mniej spektakularne, niż szumne doniesienia prasy popularnonaukowej.
inż. Przemysław Musz, EP
Wybrane źródła:
- DOI: 10.1111/pace.12074
- Wytyczne ESC 2021 dotyczące stymulacji serca i terapii resynchronizującej serca, Vol 79, Supp. VI (2021): Zeszyty Edukacyjne 6/2021
- Aquilina O. A brief history of cardiac pacing. Images Paediatr Cardiol. 2006 Apr; 8(2):17–81
- Ramsdale, D. R., Rao, A., Cardiac Pacing and Device Therapy, wyd. Springer London, 2012
- Efimov I.R., Kroll M.W., Tchou P.J., Cardiac Bioelectric Therapy. Mechanisms and Practical Implications, wyd. Springer Science+Business Media, 2009
- Bock DC, Marschilok AC, Takeuchi KJ, Takeuchi ES. Batteries used to Power Implantable Biomedical Devices. Electrochim Acta. 2012 Dec 1;84:10.1016












