 Zaloguj
Zaloguj



Opisywany w EP 8/1998 „Stoper na szkolną olimpiadę” był zbudowany z elementów dyskretnych: przerzutników, liczników, dekoderów i bramek wykonanych w technologii CMOS. Przebieg taktujący odmierzaniem czasu był uzyskiwany z generatora 1-megahercowej fali prostokątnej. Pozwoliło to na realizację stosunkowo nieskomplikowanej funkcjonalności, to jest jedynie pomiaru czasu z dokładnością do setnych części sekundy, sterowanego sygnałami „Start”, „Stop” oraz „Zerowanie”. Stoper był wyposażony w „niewygodne” złącza przeznaczone do przyłączenia zewnętrznego wyświetlacza o dużych wymiarach. Było ich aż 6, a każde miało po 4 bity. Użycie zewnętrznego wyświetlacza wymagało zastosowania dodatkowych dekoderów kodu binarnego na kod wyświetlacza 7-segmentowego oraz co najmniej 25 przewodów połączeniowych.
Zaletą tego rozwiązania było, że stoper pracował już po wykonaniu poprawnego montażu, zgodnego ze schematem ideowym. Nie trzeba było programatora, kompilatora, znajomości języka programowania oraz mikrokontrolera, dla którego był tworzony program itd. Wystarczyła lutownica i biurko.
Schemat elektryczny bloku głównego stopera z EP 8/1998 pokazano na rysunku 1. Na pierwszy rzut oka wydaje się on skomplikowany, ale na pewno zauważymy, że na jego złożoność wpływa nie tyle układ połączeń, ile liczba elementów sterujących pojedynczym wyświetlaczem, których jest 6 – bloki muszą być powielone. Każdy wyświetlacz wymaga do sterowania aż 1,5 układu scalonego – połowę licznika 4518 i cały dekoder 4543, co przy 6 wyświetlaczach daje 9 układów. Jeśli dodamy do tego dzielnik wstępny zawierający 2 układy, przerzutnik start/stop z 1 układem, bramki dekodujące „6” zawarte w 1 układzie scalonym, stabilizator napięcia oraz generator 1 MHz (co prawda to moduł, ale potraktujmy go jak 1 układ), to daje zawrotną liczbę aż 15 układów scalonych do realizowania stosunkowo nieskomplikowanej funkcji pomiaru czasu.

Pierwszym blokiem, odpowiedzialnym za precyzję działania urządzenia, jest 1-megahercowy generator kwarcowy Q1 wraz z dzielnikiem częstotliwości zrealizowanym na układach dyskretnych. Na wyjściu Q3 licznika IC10B otrzymujemy przebieg o częstotliwości 100 Hz. Po włączeniu zasilania i naciśnięciu RESET wszystkie liczniki zostają wyzerowane i pracuje jedynie generator kwarcowy dostarczając przebieg na wejścia dzielnika i przerzutnika J-K IC13A sterującego pracą urządzenia. Wejście „Start” stopera może być dołączone do wyjścia układu wykrywającego huk strzału pistoletu startowego (opis w EP 9/1998). Normalnie panuje na nim stan niski wymuszony rezystorem R2. Po strzale na wejściu „Start” wystąpi stan wysoki, co spowoduje, że po impulsie na CLK wyjście /Q przerzutnika IC13A zostanie wyzerowane i rozpocznie się odmierzanie czasu. Dekoder złożony z bramek układu IC12 powoduje wyzerowanie licznika po tym, jak ten osiągnie 60 minut. Po dokładny opis funkcjonowania urządzenia a także po opis modułów dodatkowych warto sięgnąć do otwartego, bezpłatnego archiwum EP dostępnego na stronie internetowej http://www.ep.com.pl.
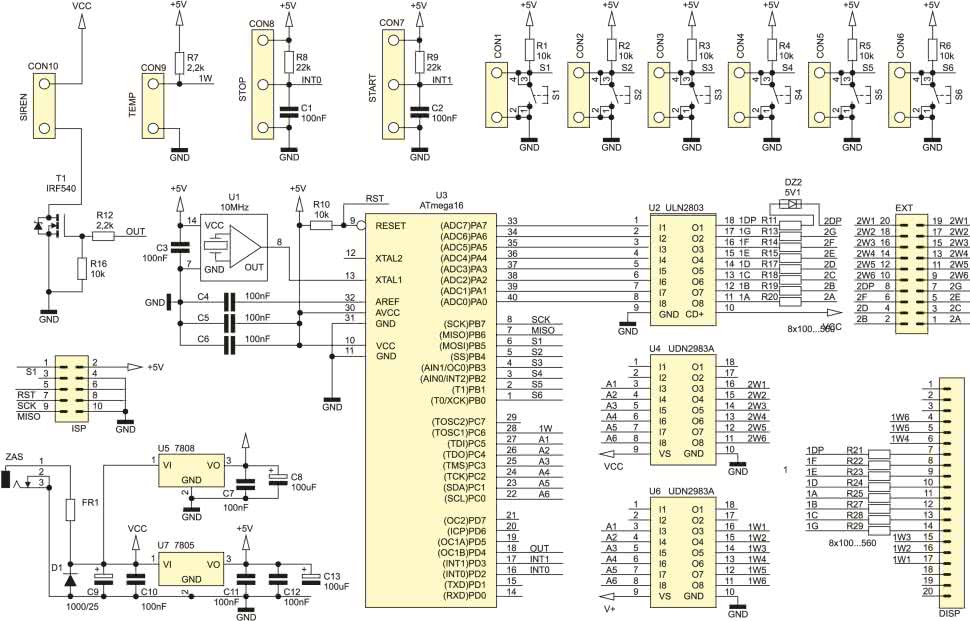
Projekt następcy kitu AVT447 opisaliśmy 14 lat później – był to „Mega stoper”, oferowany jako zestaw AVT5377. Schemat ideowy płytki głównej „Mega stopera” pokazano na rysunku 2. Oczywiście, w międzyczasie były publikowane opisy innych urządzeń, ale ten jest najbardziej zbliżony funkcjonalnie. Jeśli być konsekwentnym i liczyć moduł generatora zegarowego jako jeden układ scalony, to „Mega stoper” zbudowano w oparciu o 7 układów scalonych, z czego 2 pracują w zasilaczu, a 3 to wzmacniacze prądu wyświetlacza, których nie było w poprzedniej wersji. Jeśli odliczyć generator zegarowy, to za całą, znacznie bardziej rozbudowaną niż przed 14 laty funkcjonalność stopera odpowiada pojedynczy układ scalony, ale współcześnie, gdy niektórym konstruktorom łatwiej buduje się chociażby generator akustyczny w oparciu o procesor niż o elementy dyskretne, raczej nikogo to nie zdziwi. Funkcje realizowane przez „Mega stoper” są następujące:
- Zegar czasu rzeczywistego i opcjonalnie termometr (czas i temperatura pokazywane naprzemiennie).
- Stoper prosty mierzący czas od startu do mety.
- Stoper pięciokrotny, mierzący i zapamiętujący czas 5 zawodników.
- Wskaźnik punktów, który wyświetla 3×2-cyfrowe wartości np. punkty1, runda, punkty2.
- Licznik zdarzeń liczący w górę lub w dół.
- Alarm generowany po przekroczeniu zadanej wartości.
- Odliczanie czasu w dół od ustawionej wartości; alarm po osiągnięciu 0.
Oczywiście, cała funkcjonalność stopera jest realizowana przez oprogramowanie. Mikrokontroler jest jedynie platformą, na której jest ono uruchomione. I chociaż współcześnie komputer PC i programator dla mikrokontrolera nie są zbyt drogie, a i kompilator języka programowania można mieć za darmo, to jednak uruchomienie tak zbudowanego stopera wymaga nie tylko lutownicy i biurka, jak to było kilkanaście lat temu, ale oprócz nich także znajomości języka programowania oraz specjalistycznego sprzętu. Z drugiej strony, urządzenie z mikrokontrolerem czy innym układem programowalnym bardzo łatwo się modyfikuje – mając jakiś nowy pomysł, wystarczy zmienić program sterujący. W poprzednim rozwiązaniu bardzo trudno by było np. zrobić zapamiętywanie 5 wyników dla 5 zawodników. Taki stoper byłby bardzo rozbudowany, miałby spore wymiary, a w czasie pracy mógłby pobierać z zasilacza prąd nawet rzędu 1 A. Dziś bez trudu zawrzemy tę funkcjonalność w najprostszym mikrokontrolerze, bez modyfikowania urządzenia. Co najwyżej będziemy potrzebowali dodać jakieś przyciski sterujące.
Na koniec rzut oka na technologię montażu. Można zauważyć, że o ile znacznie wzrosła skala integracji układów scalonych, o tyle komponenty są w obudowach do montażu przewlekanego, które łatwo przylutować w warunkach domowych. Owszem, złożona funkcjonalność mikrokontrolera wymaga obudowy mającej wiele wyprowadzeń, ale już te naście lat temu były dostępne układy w obudowie o takich samych wymiarach, mające zbliżoną lub nawet większą liczbę nóżek.
Jacek Bogusz, EP












