 Zaloguj
Zaloguj



Pomiary odległości oraz prędkości (zarówno liniowej, jak i obrotowej) są szeroko stosowane niemal we wszystkich gałęziach techniki, choć na prowadzenie wysuwa się zdecydowanie klika z nich – automatyka przemysłowa, robotyka mobilna, motoryzacja, branże wojskowa i morska, czy wreszcie nowoczesne, autonomiczne i półautonomiczne drony. Przykłady – czasem wysoce zaawansowane technologicznie i imponujące, np. pod względem zakresu czy dokładności pomiaru, a innym razem banalnie proste i tanie w realizacji – można jednak znaleźć także w wielu innych dziedzinach: aparaturze lotniczej i kosmicznej, sprzęcie AGD, czy nawet... wyposażeniu sanitarnym. W artykule nie będziemy jednak dokonywać przeglądu wszystkich możliwych zastosowań czujników odległości i prędkości, skupimy się natomiast na tym, co najbardziej interesuje inżynierów – czyli na aspektach technologicznych. Pokażemy zarówno wybrane moduły OEM oraz gotowe urządzenia pomiarowe, jak i kompaktowe czujniki scalone, a także niektóre wyspecjalizowane komponenty, przeznaczone do budowy specjalizowanych rozwiązań klasy high-end.
Pomiary odległości metodą ToF
Na początek przyjrzyjmy się metodom oraz urządzeniom, służącym do pomiaru odległości obiektu (np. przeszkody, znajdującej się na drodze robota mobilnego) od czujnika. Do dyspozycji mamy, jak zawsze, szeroką gamę metod, a większość z nich opiera się w gruncie rzeczy na tym samym zjawisku – pomiarze czasu przelotu wiązki fal określonego typu (ToF – Time of Flight). Wiązka jest emitowana przez nadajnik, a po odbiciu od przeszkody jej część powraca w kierunku odbiornika (rysunek 1).
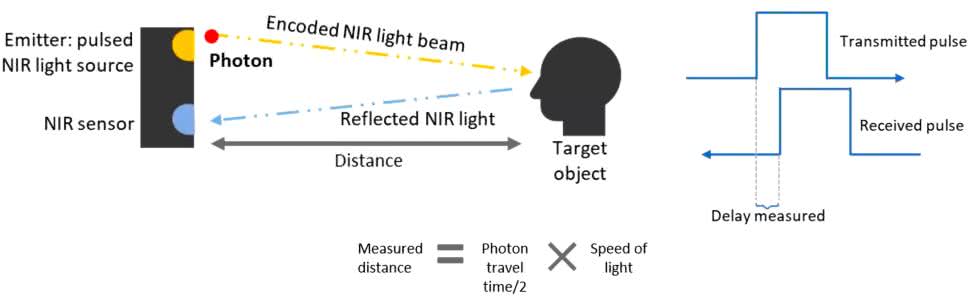
Różnica czasu Δt – przy znanej prędkości propagacji fali c w danym ośrodku – jest przeliczana na odległość d z doskonale znanego wzoru (1):
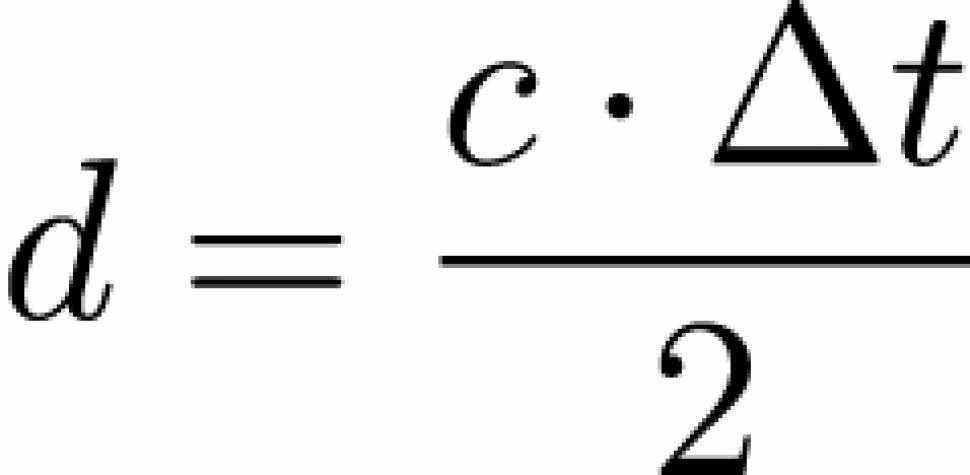
Równanie 1 można zastosować do dowolnej fali, stosowanej w celu pomiaru odległości – i tak, w praktyce stosuje się następujące zjawiska:
- światło (zwykle lasera półprzewodnikowego lub – rzadziej – diod LED),
- ultradźwięki (wytwarzane i odbierane najczęściej przez przetworniki piezoelektryczne),
- mikrofale (generowane za pomocą anten pojedynczych lub – w przypadku bardziej zaawansowanych systemów – z użyciem macierzy anten pracujących w szyku fazowanym).
W dalszej części artykułu zwrócimy uwagę na modyfikacje oryginalnej metody ToF, istotne zwłaszcza w przypadku rozwiązań laserowych i radarowych – często bowiem wykorzystuje się nie tyle samo opóźnienie (jako takie) w propagacji fali, ile powiązane z nim zależności fazowe pomiędzy sygnałami nadanymi i powracającymi.
Techniczne realizacje optycznej metody ToF
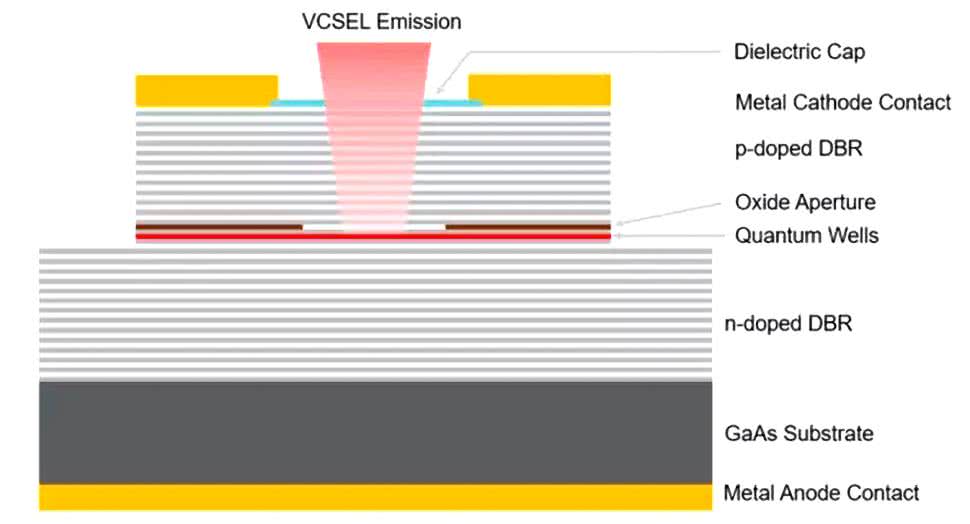
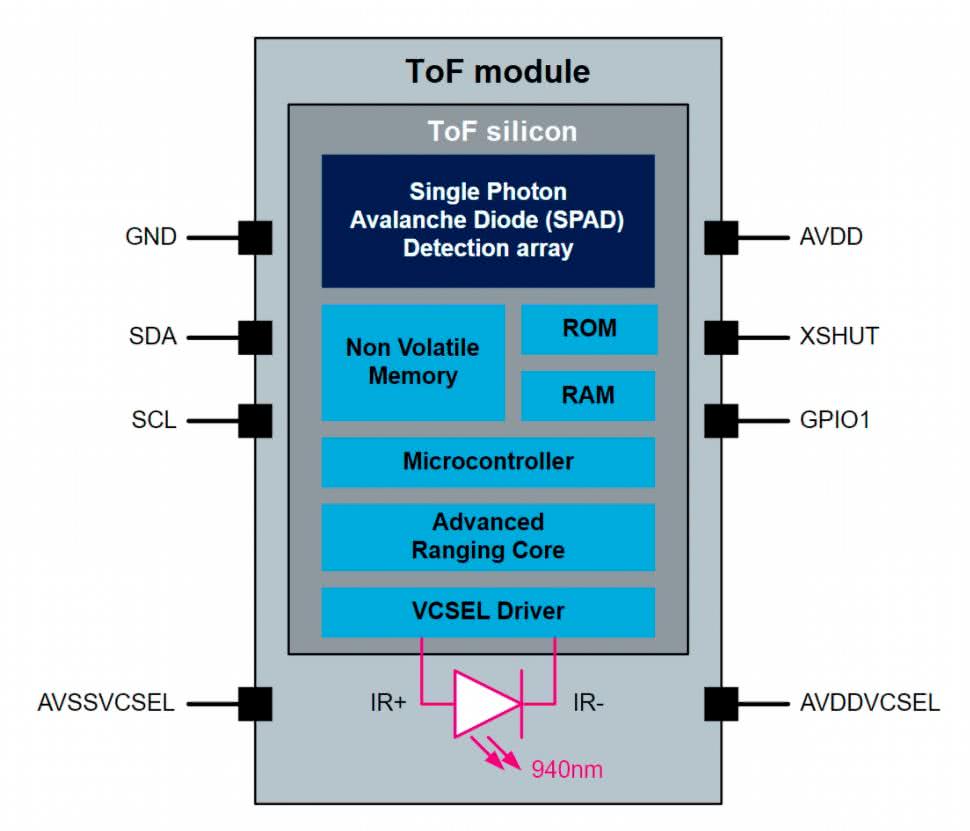
Metoda pomiaru odległości z użyciem technologii Time-of-Flight zyskała niebywałą popularność w ciągu ostatnich kilku lat, a to głównie za sprawą upowszechnienia niedrogich czujników scalonych, zbudowanych w oparciu o podczerwone lasery z pionową wnęką rezonansową VCSEL (Vertical Cavity Surface Emitting Laser – rysunek 2).
Zanim jednak przejdziemy do opisu przykładowych rozwiązań dostępnych na rynku, musimy zaprezentować dwie, zasadniczo różne, realizacje ToF: bezpośrednią i pośrednią (rysunek 3).
Metoda dToF
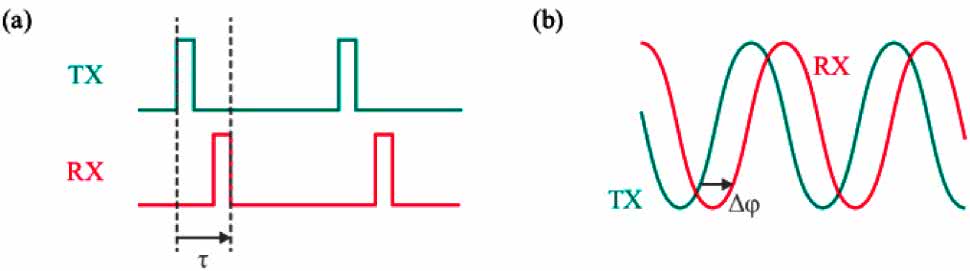
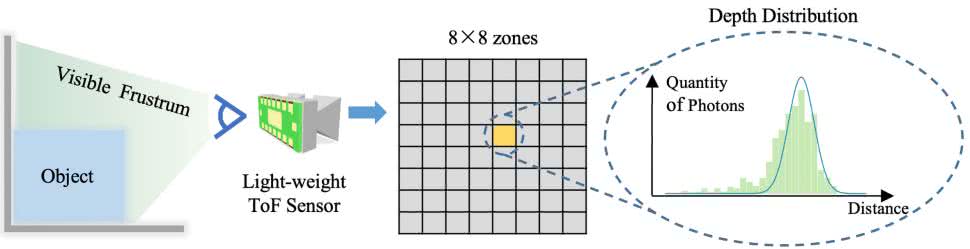
Ta pierwsza (dToF, direct Time-of-Flight) bazuje bezpośrednio na praktycznej implementacji równania 1 – układ wysyła bardzo krótki impuls światła laserowego (zwykle o szerokości rzędu 0,2...5 ns) w kierunku przeszkody i jednocześnie rozpoczyna pomiar czasu, upływającego od rozpoczęcia emisji do momentu odebrania fali odbitej (powrotnej). Z uwagi na znikomą ilość odebranych fotonów, a także ze względu na wymogi dotyczące dynamiki (czasu reakcji), w roli detektorów stosuje się fotodiody lawinowe (APD) lub detektory jednofotonowe typu SPAD (szczegółowy opis obydwu tych odmian fotodetektorów można znaleźć w obszernym opracowaniu pt. Fotoelementy – serce optoelektroniki, wydanym w „Elektronice Praktycznej” nr 3/2023). Aby zminimalizować wpływ szumu i zakłóceń zewnętrznych na wynik pomiaru, konieczna jest wielokrotna akwizycja próbek i obróbka ich na zasadzie analizy histogramu. Metoda nadaje się do zastosowania w prostszych czujnikach z pojedynczym polem widzenia (FOV) lub polem podzielonym na niewielką liczbę pikseli (czujniki wielosegmentowe – rysunek 4).
Metoda iToF
Diametralnie inne założenia leżą u podstaw metody pośredniej ToF (iToF, indirect ToF). W tym przypadku stosuje się falę ciągłą, a ściślej rzecz biorąc – wiązkę zmodulowaną amplitudowo sygnałem o relatywnie wysokiej częstotliwości (zwykle 20...100 MHz). Pośrednią miarą odległości – przeliczaną następnie na konkretną jednostkę, np. milimetry – jest tutaj zatem nie tyle opóźnienie czasowe, co… różnica fazy pomiędzy sygnałem nadanym, a falą odebraną przez detektor. Metoda ta pozwala znacząco zwiększyć rozdzielczość przestrzenną detektora, nawet do poziomu porównywalnego ze standardowymi modułami kamer CMOS. W tym przypadku jednak znajdują zastosowanie specjalne detektory, określane mianem PMD (od Photonic Mixer Device, co w dosłownym tłumaczeniu oznacza fotoniczny mieszacz – rysunek 5). Ich niezwykłą zaletą jest zdolność do demodulacji fazy odebranej wiązki światła w sposób… całkowicie organiczny, tj. na poziomie poszczególnych pikseli, bez udziału zewnętrznych układów kondycjonujących.
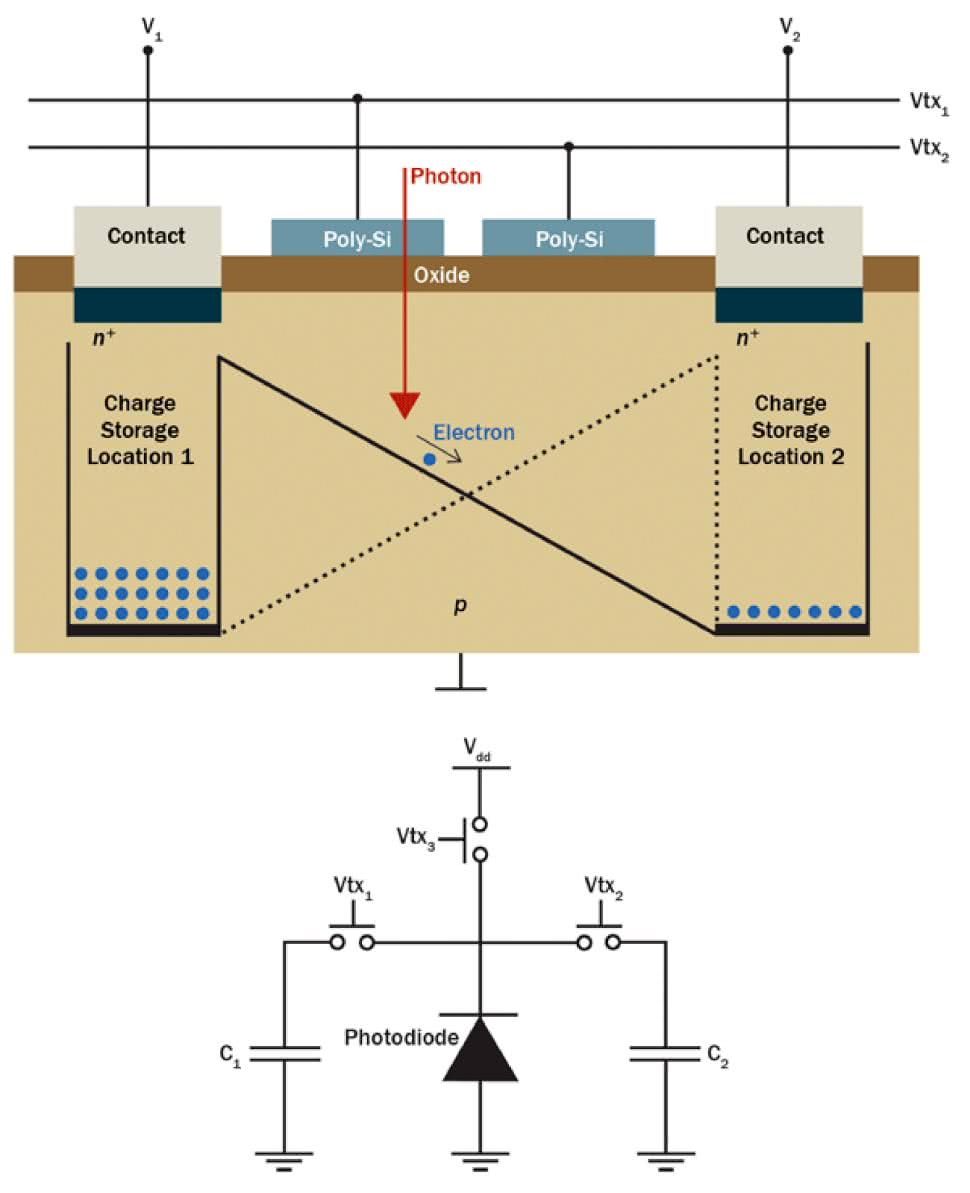
Ilustrację zasady działania PMD pokazano na rysunku 6 – foton padający na powierzchnię struktury krzemowej detektora powoduje wygenerowanie ładunku elektrycznego, który – w zależności od podanego z zewnątrz sygnału modulującego (zsynchronizowanego z oświetlaczem) – przerzuca go do jednego z dwóch kondensatorów. W zależności od przesunięcia fazowego pomiędzy sygnałem nadanym, a odebranym przez dany piksel, zmienia się stosunek napięć (V1, V2), będący efektem gromadzenia ładunków w poszczególnych kondensatorach.
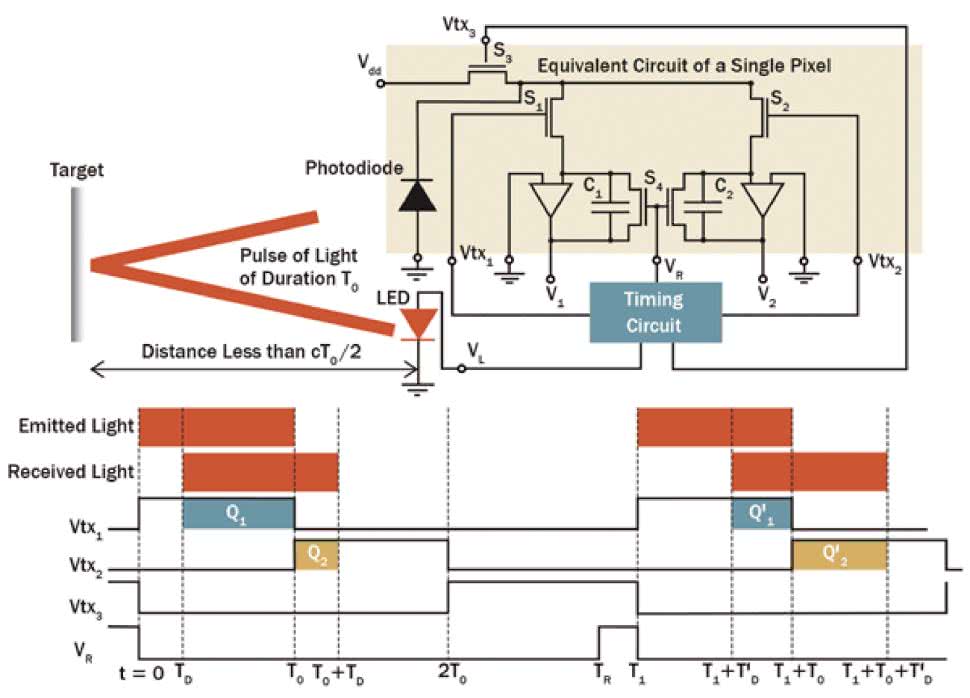
Warto odnotować, że z uwagi na fakt, iż najważniejsza część procesu demodulacji jest wykonywana na poziomie struktury detektora do jego pracy jest konieczny w zasadzie tylko zewnętrzny układ synchronizacji oraz przetworniki ADC, odpowiedzialne za próbkowanie napięć z półpikseli. Za cenę większego stopnia złożoności samej matrycy (w porównaniu do zwykłych czujników obrazu, np. CMOS), otrzymujemy jednak niebywale cenną możliwość mapowania głębi sceny, czyli… obrazowania odległości poszczególnych jej elementów od kamery.
Scalone czujniki laserowe ToF
W ostatnich latach mamy do czynienia z istną ekspansją sensorów dToF i to zarówno w urządzeniach konsumenckich, jak i aplikacjach przemysłowych. Opanowanie technologii produkcji niedrogich, kompaktowych czujników w obudowach SMD sprawiło, że kolejne firmy dołączają do półprzewodnikowego wyścigu, udostępniając klientom coraz bardziej zaawansowane układy o zaskakujących możliwościach pomiarowych. Głównym graczem na rynku jest firma STMicroelectronics, która wdrożyła całą serię sensorów odległości, bazujących na opatentowanej odmianie technologii dToF nazwanej FlightSense.
Czujniki zawierają oświetlacze laserowe VCSEL oraz detektory bazujące na strukturach SPAD, zaś dane pozyskane z analogowego front-endu są przetwarzane statystycznie i udostępniane poprzez interfejs I²C. Rodzina czujników, oznakowanych jako VL61... lub VL53..., zawiera zarówno proste, podstawowe sensory odległości, jak i rozbudowane, wielostrefowe czujniki, przystosowane do aplikacji AI związanych m.in. ze zliczaniem obiektów (np. osób w pomieszczeniu). Niektóre modele mają ponadto wbudowany czujnik oświetlenia zewnętrznego (ALS), co ma znaczenie w przypadku zastosowań w urządzeniach mobilnych, głównie smartfonach.

Jako przykład jednego z bardziej zaawansowanych czujników ToF marki STMicroelectronics warto podać układ o oznaczeniu VL53L4CX (fotografia 1, rysunek 7).
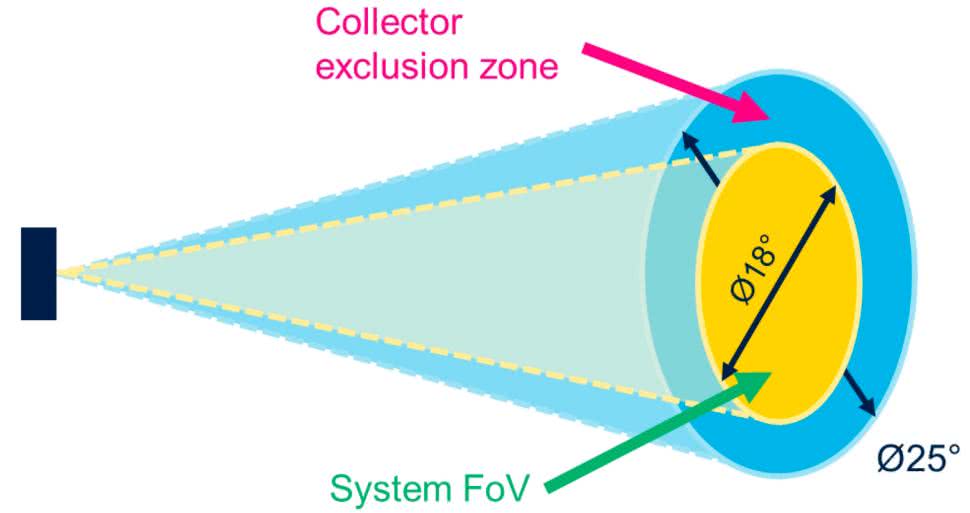
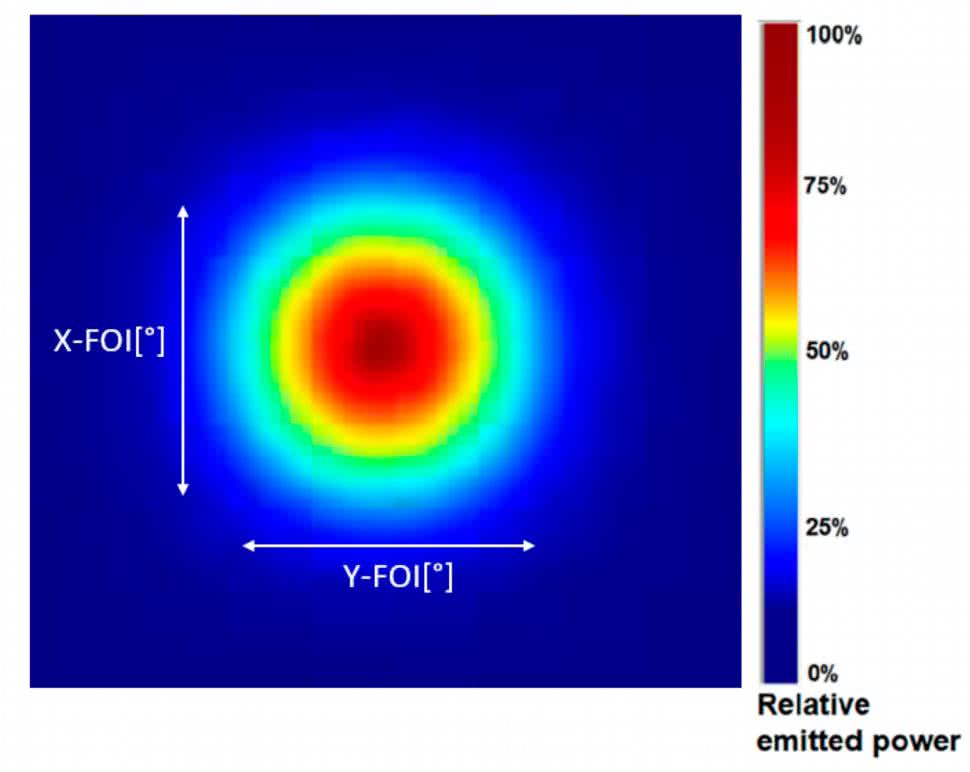
Dzięki wąskiemu polu widzenia (efektywny obszar FoV to zaledwie 18° – rysunki 8 i 9), konstruktorom udało się uzyskać spory zasięg, dochodzący aż do 6 metrów (!), choć rzeczywista wartość zależy w dużej mierze od reflektancji powierzchni – w przypadku białej planszy (reflektancja 88%) zasięg istotnie osiąga 500...600 cm, ale przy jasnoszarych obiektach (54%) parametr ten spada do 420...460 cm, zaś dla reflektancji 17% wynosi już zaledwie 210...250 cm.
Co więcej – wszystkie te pomiary dotyczą tylko pracy wewnątrz pomieszczeń, gdyż przy oświetleniu słonecznym zasięg drastycznie spada do zaledwie 110...180 cm (w najlepszym wypadku). Nie należy jednak dziwić się tak dużemu rozrzutowi wartości, zważywszy na fakt, iż mamy do czynienia z miniaturowym czujnikiem (4,4×2,4×1,0 mm), w którym źródłem światła jest maleńki laser VCSEL klasy 1 oraz równie kompaktowe detektory, pracujące (dosłownie) z pojedynczymi fotonami. Drastycznie trudne warunki, narzucone przez zastosowaną technologię, wpływają ponadto na ograniczenie dokładności – pomiarowej – ta znacząco maleje powyżej granicy 110 cm i w przypadku szarych obiektów o reflektancji 17% wynosi zaledwie ±8% (w otwartym terenie), podczas gdy odległość przeszkód białych (88%) w pomieszczeniach jest wskazywana z dokładnością ±3%.
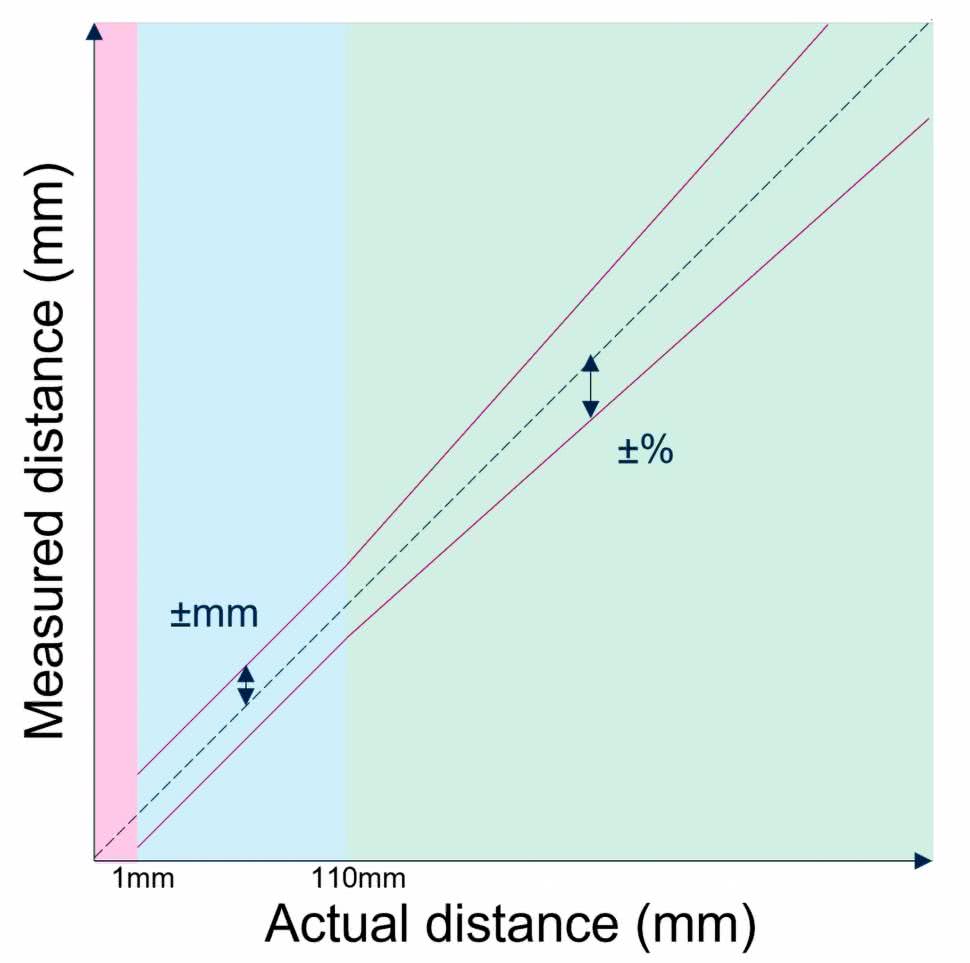
Warto zwrócić uwagę, że w sensorach dToF marki ST, mamy do czynienia z charakterystycznym, dwuzakresowym sposobem określania dokładności – w przedziale bliskim (w tym przypadku 10...110 mm) granica błędu jest podawana w sposób bezwzględny (mm), zaś dopiero dalej – jako dokładność względna (% wskazania) – patrz rysunek 10.
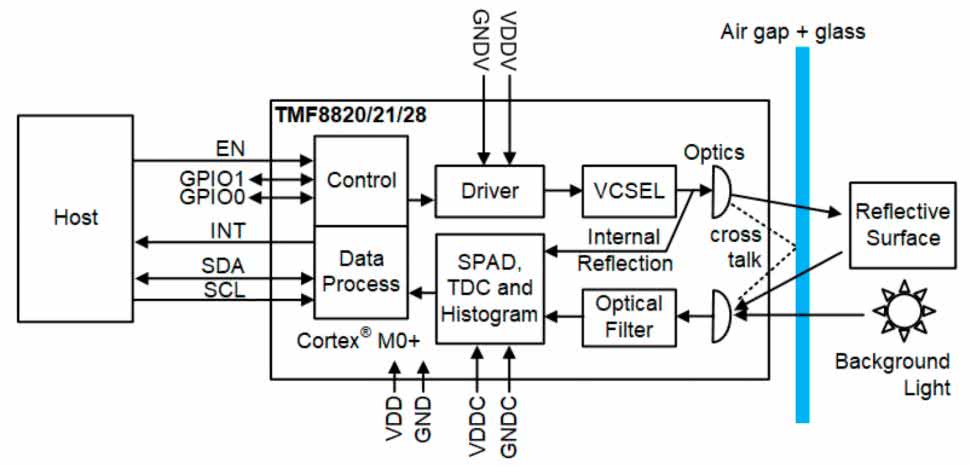
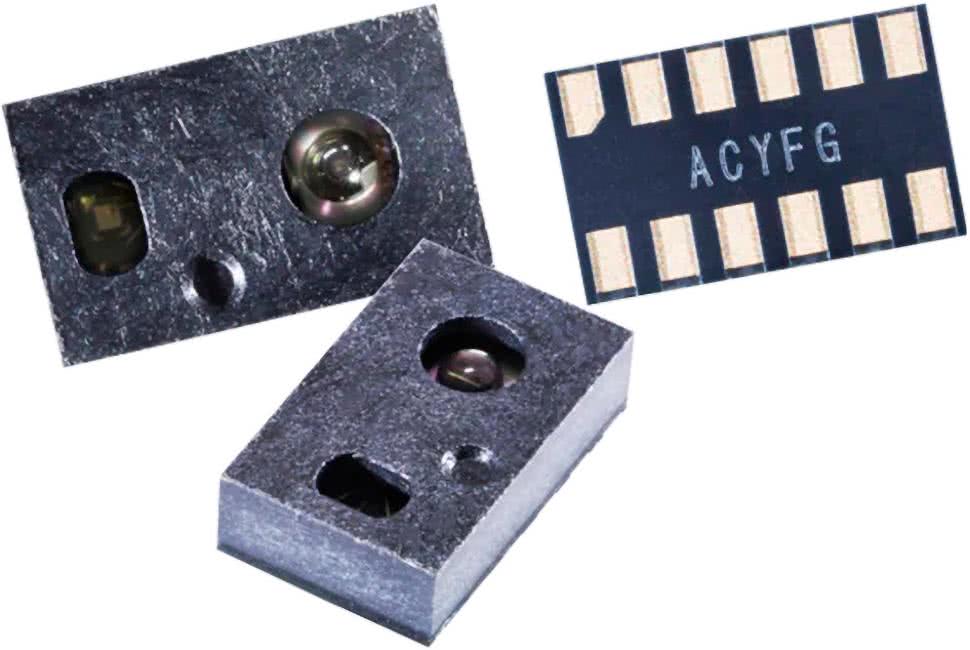
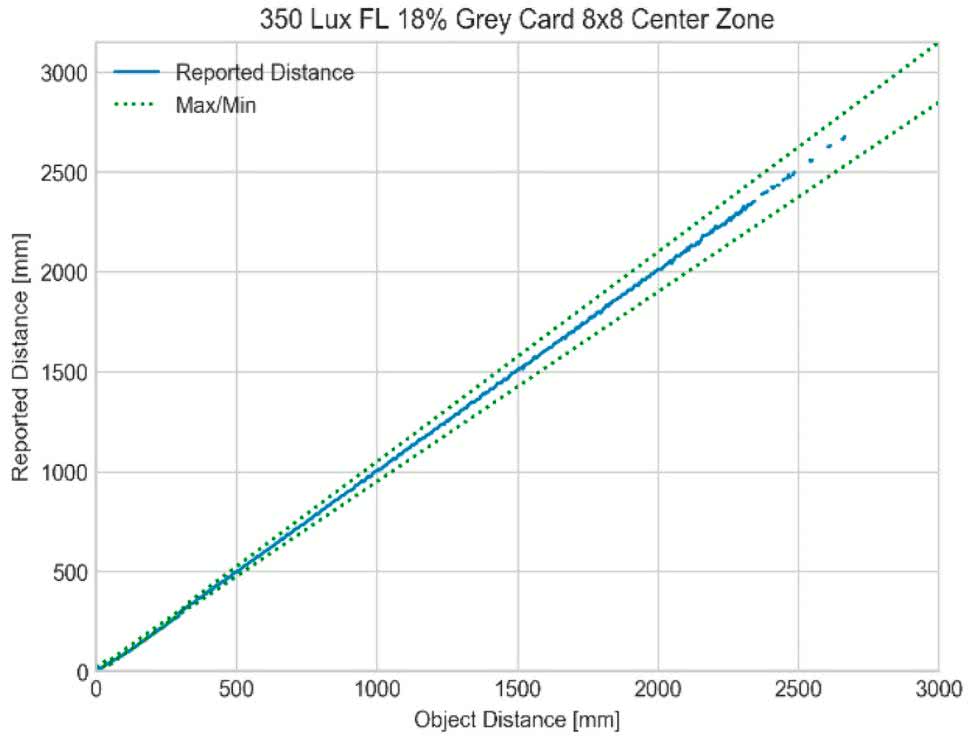
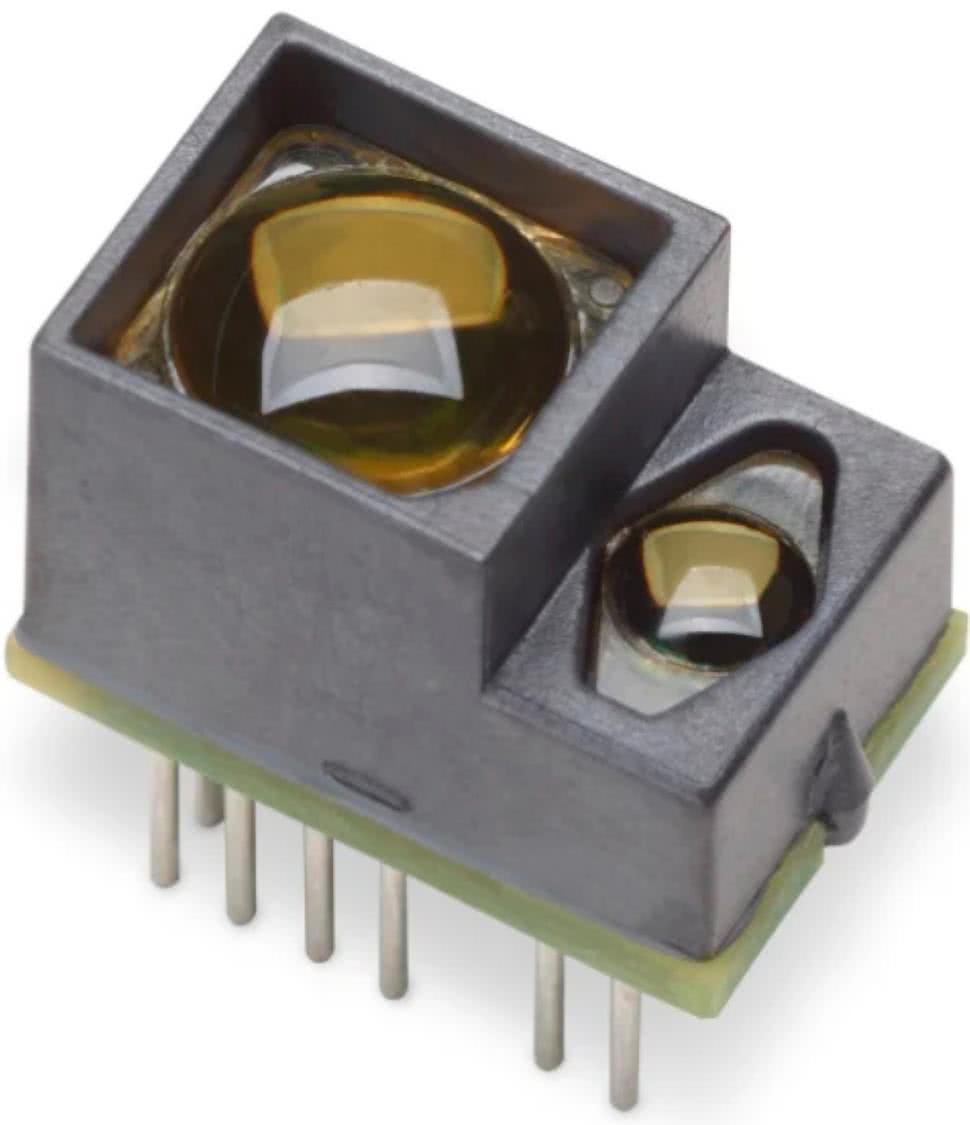
W przypadku układów innych producentów – w tym ams-OSRAM – dokładność może być podawana w prostszy sposób, np. jako błąd względny dla danych warunków pracy. Przykład takiej charakterystyki dla wielostrefowego czujnika z serii TMF8820/21/28 (rysunek 11, fotografia 2), można zobaczyć na rysunku 12.
Co ciekawe, nawet w tak nowoczesnych technologicznie produktach, jak współczesne czujniki dToF, możemy już zauważyć swego rodzaju powrót do źródeł. Pierwsze tego typu sensory dokonywały obliczeń statystycznych w sposób całkowicie automatyczny, udostępniając użytkownikowi gotowy wynik pomiaru – i to było w zupełności wystarczające do większości aplikacji. Okazało się jednak, że wraz z wdrożeniem czujników wielostrefowych o coraz wyższej rozdzielczości przestrzennej, układy dToF zaczęły być rozważane jako potencjalnie atrakcyjne rozwiązanie do wykrywania gestów bądź zliczania osób i innych obiektów w przestrzeni trójwymiarowej.
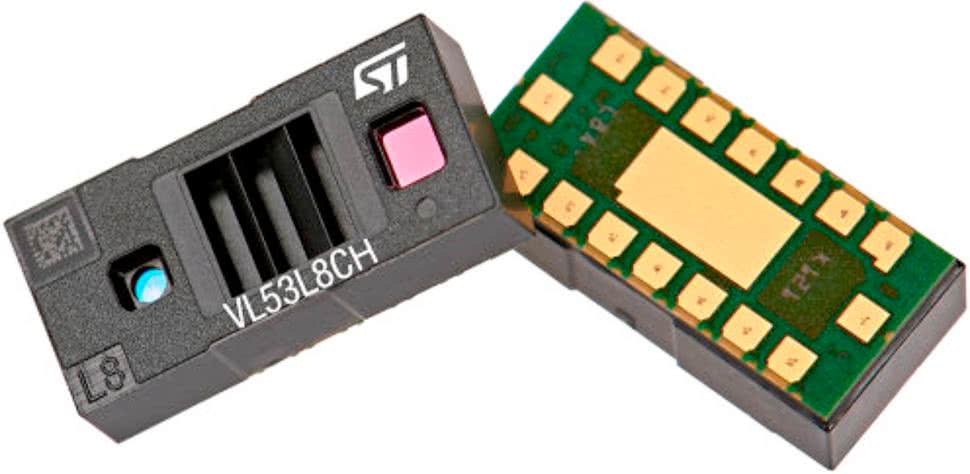
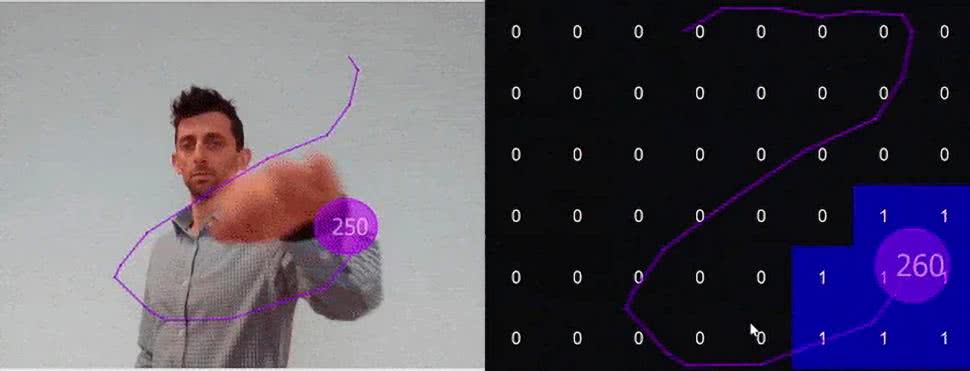
Ekspansja zastosowań sztucznej inteligencji dotarła i tutaj, po czym szybko okazało się, że proste dane, będące wynikiem obliczeń dokonywanych przez procesor zintegrowany wewnątrz czujnika, mogą być niewystarczające dla sieci neuronowych, które z zasady „pożerają” spore ilości danych wejściowych. I tak, firma STMicroelectronics postanowiła zrobić swego rodzaju krok w tył – układ VL53L8CH (fotografia 3), dumnie określany mianem Artificial intelligence enabler, pozwala na pozyskiwanie z czujnika całego zestawu surowych danych pomiarowych w postaci pełnych histogramów (rysunek 13) – zamiast pojedynczych wyników pomiaru dystansu dla poszczególnych pikseli 64-pikselowej matrycy, otrzymujemy więc pełne statystyki, na podstawie których algorytmy AI mogą wnioskować o obiektach znajdujących się w polu widzenia ze znacznie większą elastycznością.

W praktyce może się to przełożyć na znaczną poprawę efektywności algorytmów i redukcję artefaktów, np. w przypadku rozpoznawania gestów (rysunek 14) czy też skanowania otoczenia, znajdującego się przed robotem sprzątającym (rysunek 15).

Moduły LIDAR
Podstawową wadą scalonych czujników odległości jest ich niewielki zasięg, przeważnie ograniczony do 4...6 metrów. W przypadku wielu aplikacji taki zakres pracy jest oczywiście wystarczający, jednak np. algorytmy omijania przeszkód bądź manewry automatycznego lądowania dronów wymagają już znacznie większego zasięgu detekcji. Kompaktowe dalmierze laserowe znajdują także zastosowanie w licznych aplikacjach robotycznych, przemysłowych czy też systemach bezpieczeństwa. Zapotrzebowanie na tego typu moduły jest niczym apetyt, który rośnie w miarę jedzenia – odpowiedzią na rosnący popyt w zakresie rozwiązań do pomiaru dużych odległości okazują się moduły LIDAR.
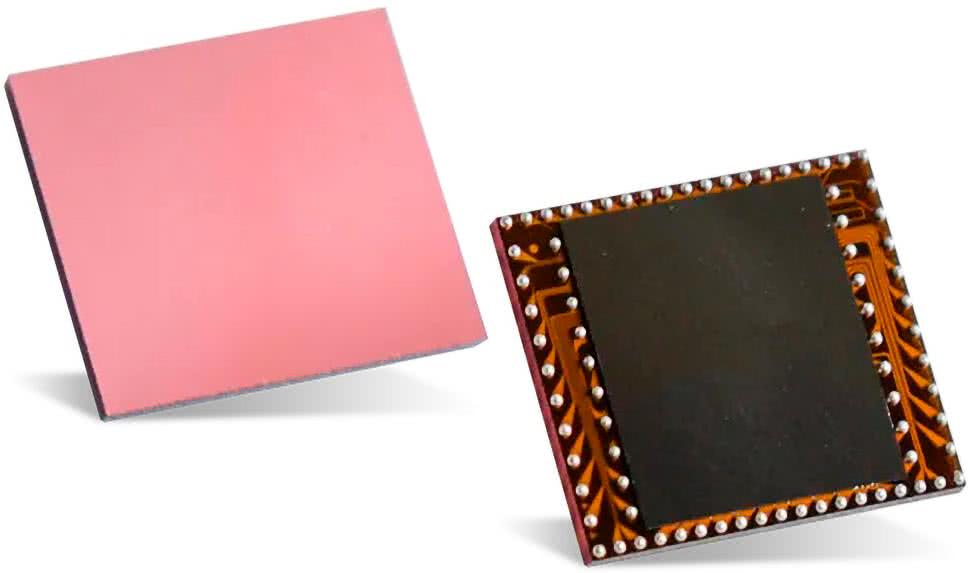
Do najbardziej kompaktowych LIDAR-ów o zasięgu przekraczającym 10 metrów należą wielostrefowe dalmierze z serii AFBR-S50 marki Broadcom (fotografia 4). W każdym modelu, w obudowie o rozmiarach 12,4×7,6×7,9 mm umieszczono wydajny laser impulsowy VCSEL, macierz detektorów (w liczbie do 32) oraz układ ASIC, zasilany napięciem 5 V. Zasięg pomiaru dochodzi do 50 metrów, a prędkość odświeżania – w zależności od liczby obsługiwanych pikseli – osiąga nawet wartość 3 kHz. Co ważne, w przypadku pracy w trybie dwuczęstotliwościowym zasięg niektórych modeli wydłuża się nawet do 200 metrów, co przy tak kompaktowych wymiarach całości jest naprawdę nie lada osiągnięciem.
W podobnym do czujników AFBR-S50 zakresie mierzonych odległości pracują także liczne modele LIDAR-ów, oferowane na rynku elektroniki amatorskiej – choć w tym przypadku próżno szukać elementów o równie kompaktowych wymiarach. Jeżeli rozmiar możliwego do zamontowania modułu nie jest szczególnym ograniczeniem, można zdecydować się np. na LIDAR-Lite v3, którego dystrybutorem jest znana marka SparkFun, a producentem – firma Garmin (fotografia 5). Zasięg dalmierza wynosi 40 metrów, zaś moc szczytowa lasera (w tym przypadku zastosowano standardową diodę laserową o emisji bocznej zamiast źródła VCSEL) to 1,3 W. Wymiary obudowy sensora wynoszą 20×48×40 mm.

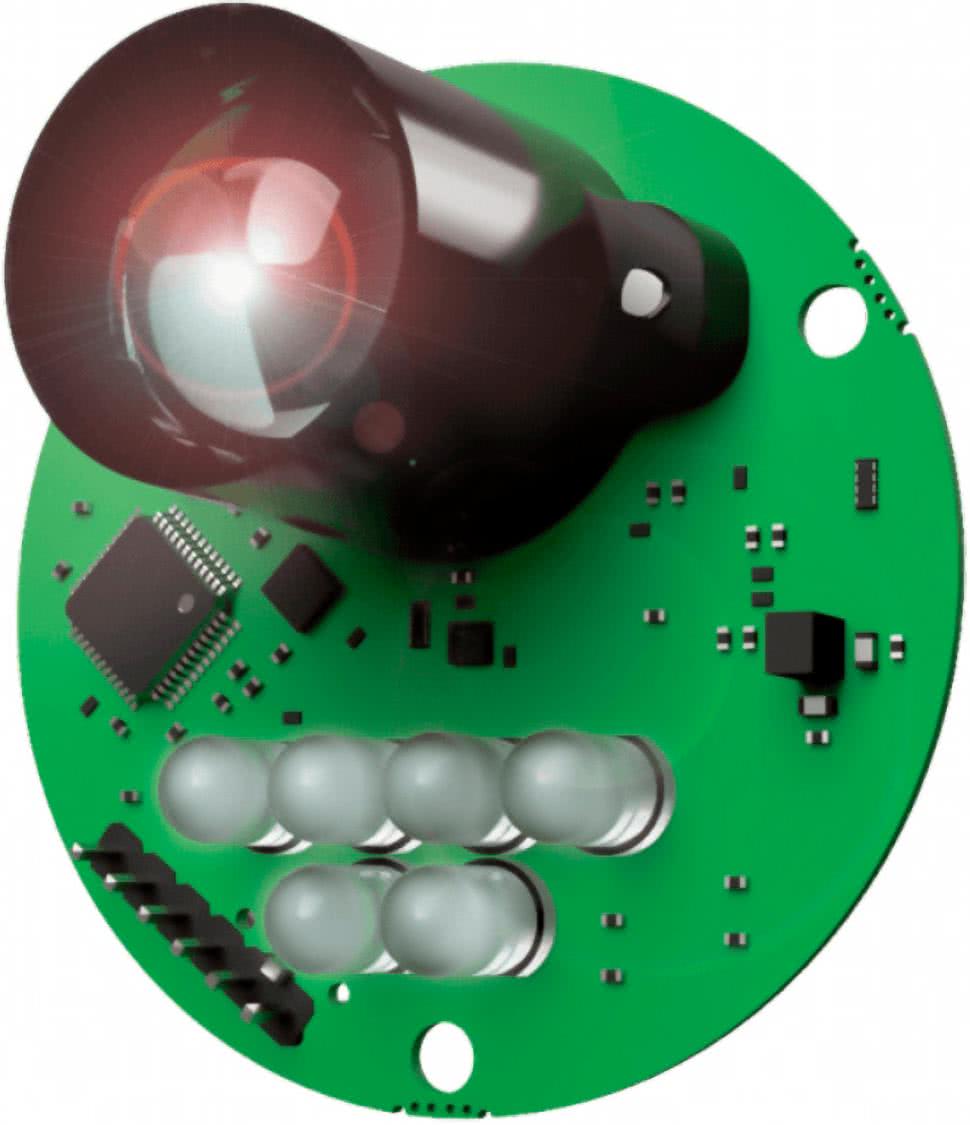
Co ciekawe, identyczny dystans można uzyskać także bez użycia lasera – takie rozwiązanie, z oświetlaczem wykonanym na bazie zestawu sześciu przewlekanych diod LED IR (850 nm) o kącie emisji 3°, zaproponowała marka LeddarTech. Moduł LeddarOne (rysunek 16), zbudowany w oparciu o okrągłą płytkę drukowaną o średnicy 51 mm, umożliwia akwizycję wyników pomiaru z częstotliwością dochodzącą do 140 Hz, a jego główną zaletą jest niewątpliwie… brak potencjalnego ryzyka, wynikającego z zastosowania doskonale skolimowanego źródła laserowego (w dodatku o niewidzialnym dla człowieka promieniowaniu). Większy kąt propagacji podczerwieni pozwala także niejako uśrednić wyniki pomiaru z większej powierzchni, co w niektórych sytuacjach będzie cechą wysoce pożądaną.
Na koniec tej części naszej prezentacji warto jeszcze zapoznać się z ofertą marki Safran Vectronix AG, która opracowała wysokiej klasy moduły LIDAR, przeznaczone m.in. dla branży militarnej. W tym przypadku mamy już do czynienia z naprawdę zaawansowanymi urządzeniami, zdolnymi do pracy w zakresie od 4,5 do nawet 25 km, zaś najwyższy model – LRF7047 (największy spośród pokazanych na fotografii 6) – pozwala na pomiar odległości aż do 30 km i to z doskonałą dokładnością 1 metra (!). Co szczególnie ważne w przypadku urządzeń wojskowych, LIDAR LRF7047 pracuje w paśmie 1550 nm, dzięki czemu pozostaje całkowicie niewidoczny dla konwencjonalnych kamer NIR.

Skanery laserowe OEM
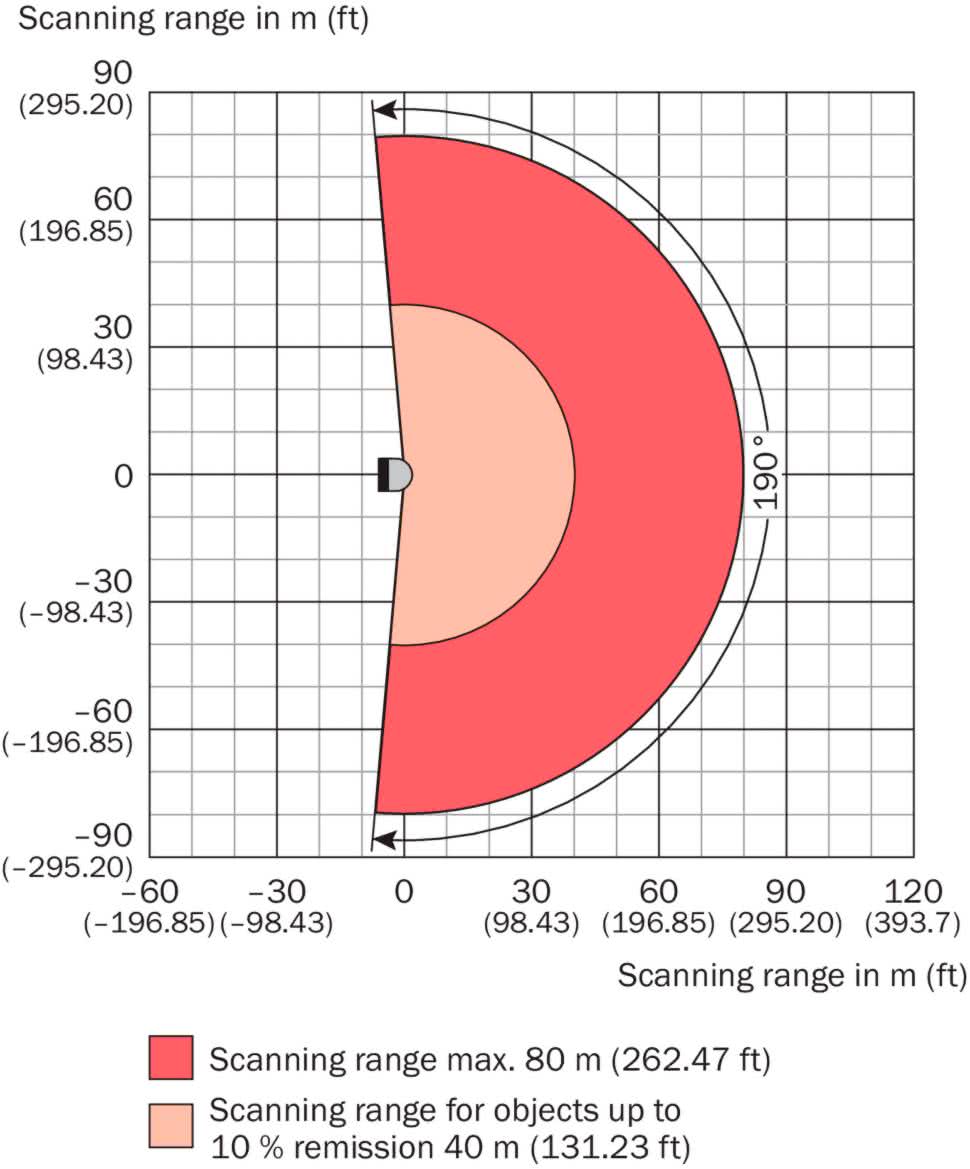
Niektóre aplikacje – zwłaszcza w zakresie robotyki przemysłowej czy też autonomicznych pojazdów – wymagają dokładnej orientacji w otaczającej przestrzeni. W takich przypadkach pomiar odległości w jednym punkcie lub nawet na niewielkim, prostokątnym obszarze, przestaje wystarczać – koniecznie jest sięgnięcie po bardziej zaawansowane techniki. Skanery laserowe – bo o nich mowa – umożliwiają pełne mapowanie przestrzeni poprzez cykliczne przemiatanie badanego obszaru wiązką lasera i dokonywanie wielopunktowych pomiarów odległości. Tak działają m.in. szeroko stosowane w przemyśle skanery marki SICK – Czytelnicy zaznajomieni z automatyką przemysłową doskonale kojarzą urządzenia w charakterystycznych, półokrągłych obudowach, wyposażonych w czarne okno optyczne, o zakresie pracy rzędu 190° (fotografia 7, rysunek 17).

Ten sam producent oferuje także skanery z oknami dookólnymi, o znacznie szerszym zakresie przemiatania (fotografia 8), a szczególną podgrupę produktów stanowią skanery, przeznaczone do systemów bezpieczeństwa i certyfikowane na zgodność z normami ISO 13849-1 oraz IEC 62998 (fotografia 9).


Tego typu urządzenia w wielu przypadkach mogą zastąpić lub przynajmniej efektywnie uzupełnić konwencjonalne zabezpieczenia, stosowane na halach produkcyjnych (np. bariery optyczne), choć równie dobrze spisują się w zastosowaniach mobilnych, np. wózkach AGV (fotografia 10).

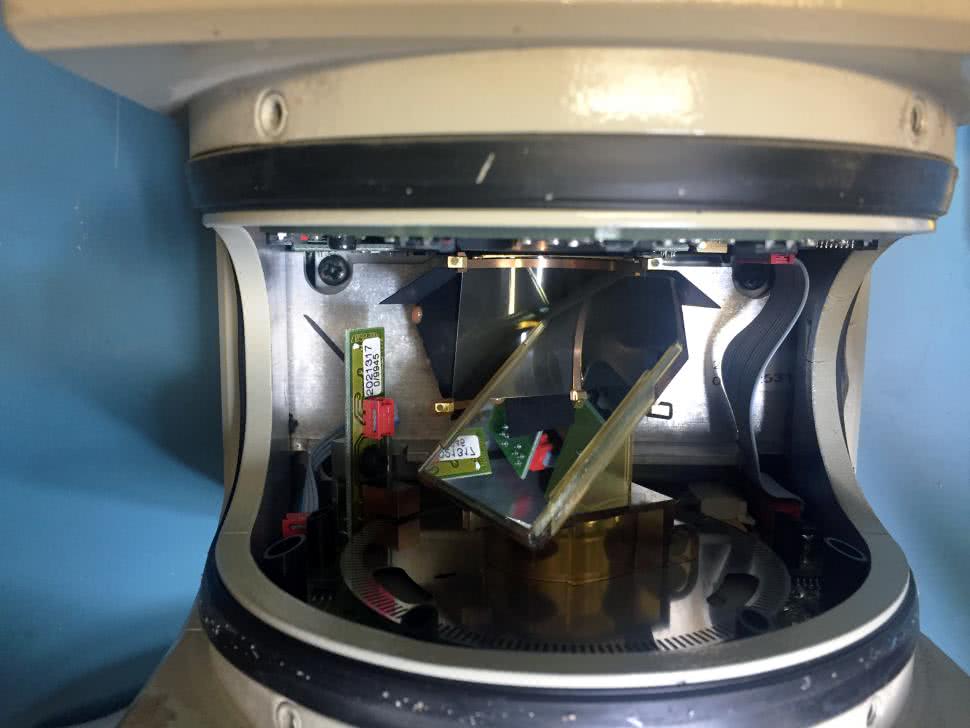
Warto zwrócić uwagę, że opisane powyżej skanery LIDAR są przeważnie bardzo rozbudowanymi urządzeniami, bazującymi na zaawansowanych systemach elektroniczno-mechaniczno-optycznych (fotografia 11), co wpływa nie tylko na wysoką cenę, ale także na rozmiary i masę całości.

W urządzeniach tego typu często można spotkać obrotowe lustro, przemiatające otoczenie wokół skanera (fotografia 12) – całość elektroniki może więc pozostać całkowicie nieruchoma, na stałe związana z obudową urządzenia.
Diametralnie inne podejście zaproponowała firma LightWare Lidar LLC: skaner SF45/B ma bowiem… obrotową głowicę (fotografia 13). Kompaktowy LIDAR przemiata otoczenie z częstością 5 Hz, wykonując przy tym 5000 odczytów odległości w zakresie nawet do 50 m, podczas gdy nieruchoma pozostaje jedynie niskoprofilowa podstawa montażowa urządzenia.

Kamery ToF
Liczba dostępnych na rynku modułów kamer iToF jest rzecz jasna nieporównanie mniejsza, niż w przypadku prostszych czujników wielostrefowych i jednostrefowych dToF. Nietrudno jednak zauważyć, że obiecujące możliwości, wynikające z połączenia obrazowania 3D oraz sztucznej inteligencji, intensywnie napędzają koniunkturę w tym segmencie rynku, co przejawia się wprowadzaniem do sprzedaży kolejnych matryc iToF, front-endów ToF, modułów OEM oraz zestawów ewaluacyjnych, bazujących na ultranowoczesnych czujnikach głębi.
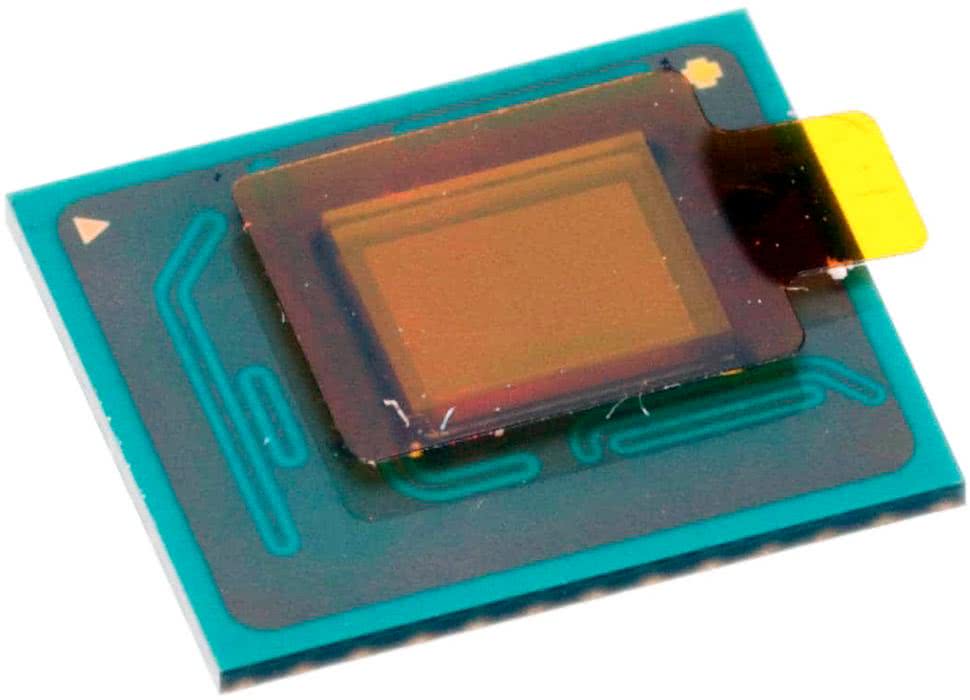
I tak, znana z szerokiego portfolio rozmaitych czujników optycznych firma Melexis opracowała macierze MLX75026 (QVGA – fotografia 14) oraz MLX75027 (VGA), zaś Texas Instruments wprowadził do sprzedaży masowej matrycę OPT8241 (320×240 px – fotografia 15).
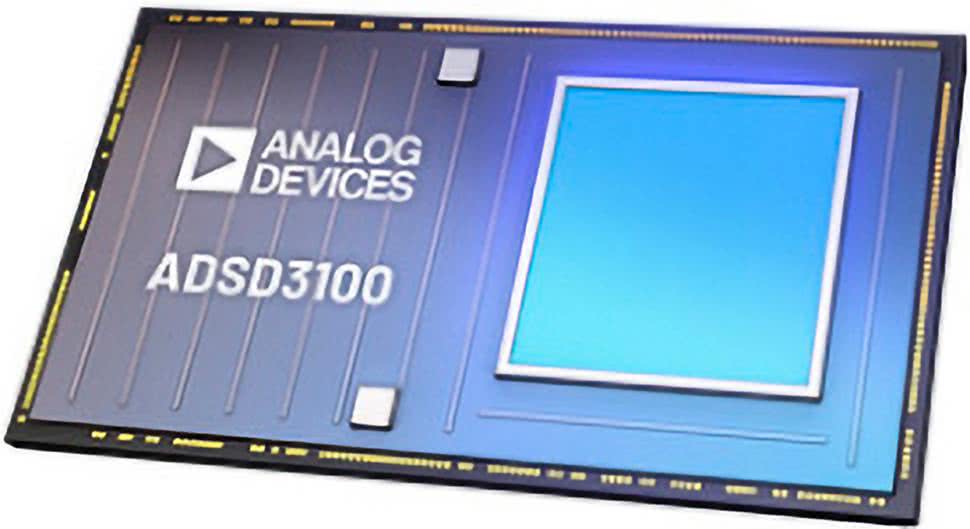
Jeszcze dalej poszły firmy STMicroelectronics (VD55H1 – czujnik obrazu iToF o rozdzielczości 672×804 px – obecnie w fazie przedwdrożeniowej) oraz Analog Devices (1-megapikselowa macierz ADSD3100 o rozdzielczości 1024×1024 px – fotografia 16).
Co ciekawe, matryce o mniejszej rozdzielczości da się już dziś kupić za 200...300 złotych, można zatem uznać, że ogromny potencjał, oferowany przez technologię iToF, otrzymujemy za półdarmo. Sprawa okazuje się jednak mniej optymistyczna, jeżeli weźmiemy pod uwagę stopień złożoności problemów natury mechanicznej i optycznej, związanych z budową modułu kamery od podstaw. Do tego dochodzi kwestia szybkiego oświetlacza, który pozwoli uzyskać w miarę możliwości jednorodne oświetlenie całej sceny podczerwienią…
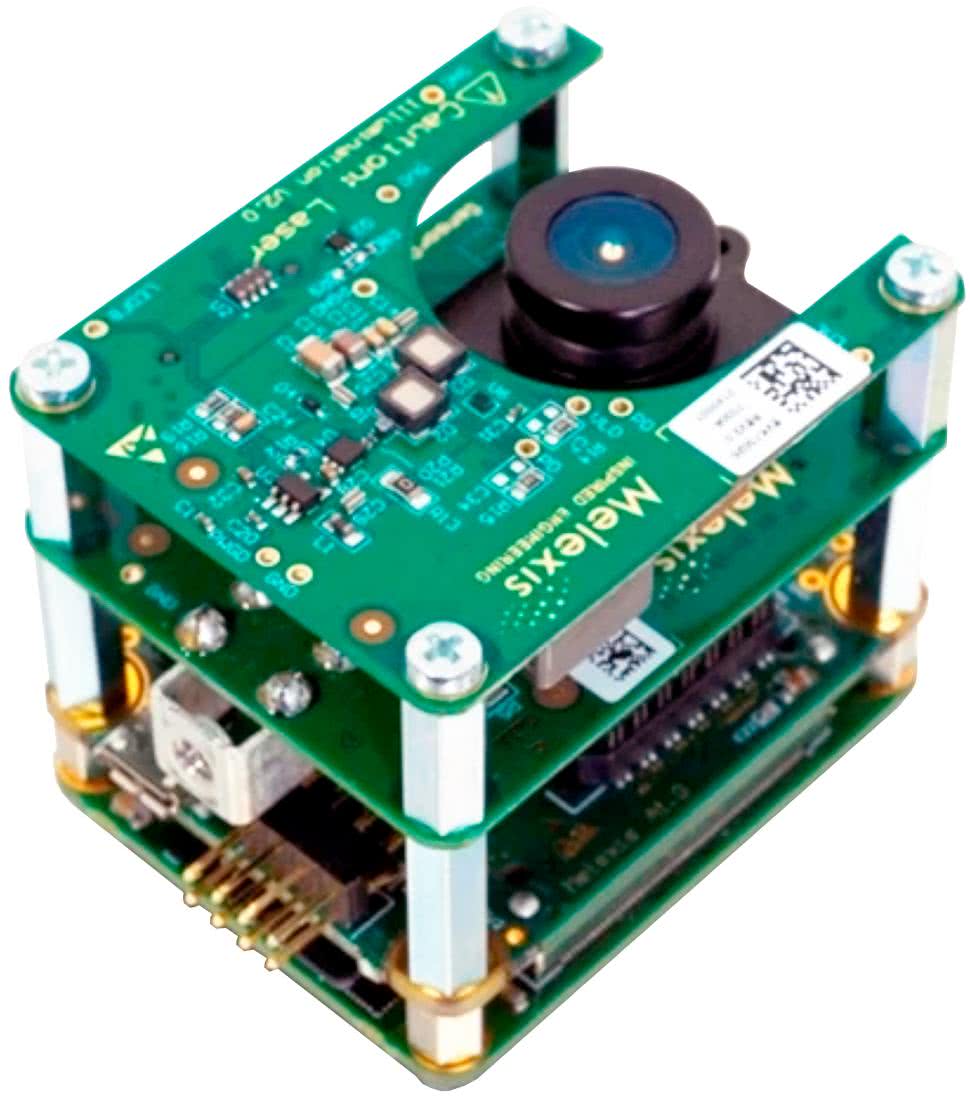
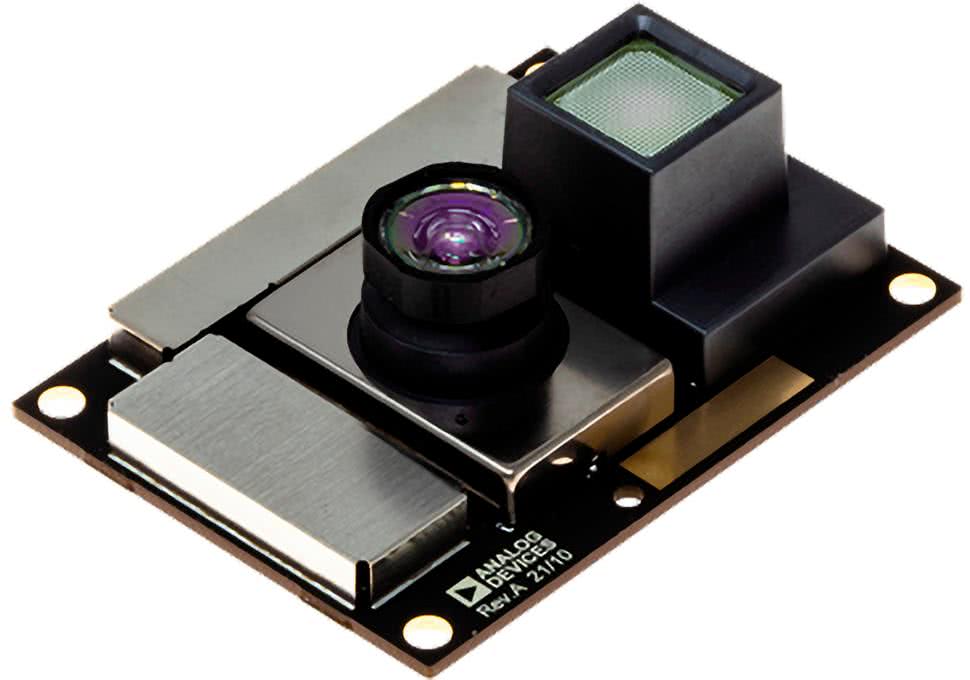
Świadomi tych wszystkich aspektów inżynierowie opracowali zatem zestawy ewaluacyjne, pozwalające na szybkie rozpoczęcie prac z nowoczesnymi macierzami ToF. O ile jednak rozbudowane zestawy marki Melexis, wyposażone nawet w interfejs Ethernet (fotografia 17) są raczej niezbyt przyjazne zainteresowanym nimi użytkownikom pod względem finansowym (ceny zaczynają się od 9 tysięcy złotych i szybują – w zależności od wersji – nawet do ponad 20 tys. PLN), to już doskonały zestaw ADTF3175BMLZ (fotografia 18) marki Analog Devices jest w chwili pisania niniejszego artykułu dostępny za niewiele ponad 1000 zł (!).
Warto też wspomnieć o gotowym do użycia module kamery ToF o nazwie flexx2 (fotografia 19), opracowanym przez firmę Pmdtechnologies ag – oferowana przez niego rozdzielczość jest wprawdzie bardzo przeciętna (zaledwie 224×172 px), ale za to wygodne podłączenie (USB-C) i rozbudowane SDK ze wsparciem języków C/C++, Matlaba, czy też biblioteki OpenCV, zapewnia ułatwioną integrację oraz znacząco przyspiesza rozpoczęcie pracy z kamerą na różnych platformach sprzętowych i programowych.

Sonary ultradźwiękowe
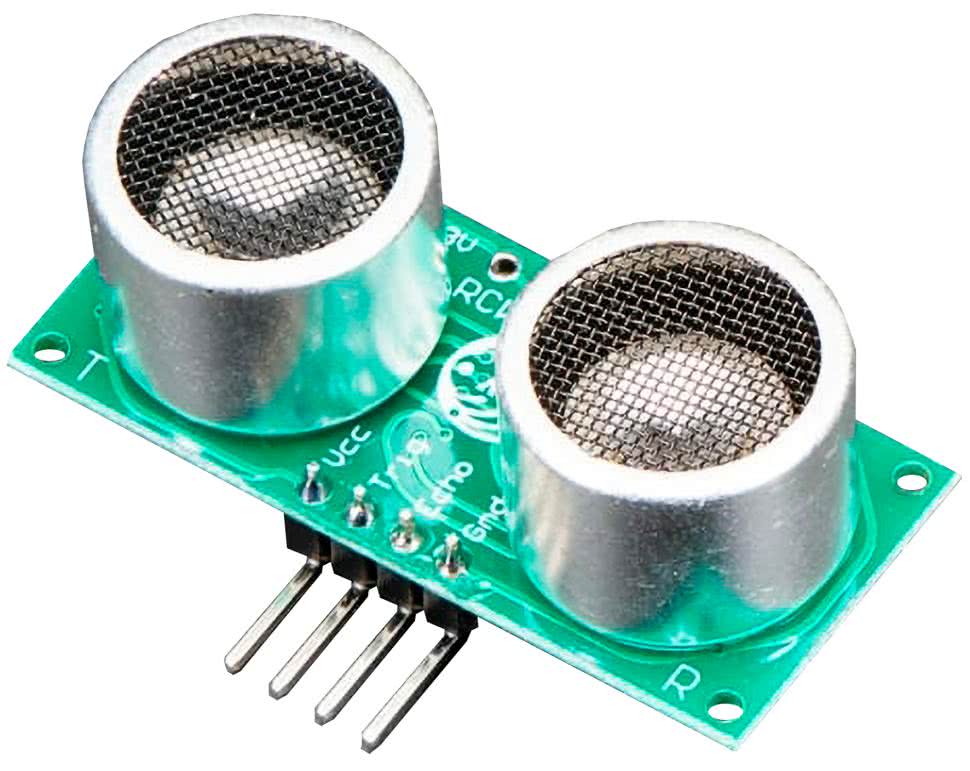
Pomiar odległości z użyciem sonarów (SOund Navigation And Ranging) ultradźwiękowych jest znany już od przeszło stu lat, a impulsem do rozpoczęcia prac nad nawigacją akustyczną była słynna katastrofa Titanica. Po upływie całego wieku, sonary nadal stanowią jedno z podstawowych narzędzi w branży morskiej, choć równie często można je spotkać w innych aplikacjach – rybołówstwie i wędkarstwie (echosondy do wykrywania pojedynczych ryb i całych ławic), robotyce mobilnej (pomiar odległości od przeszkód) czy motoryzacji (czujniki parkowania). Od strony konstrukcyjnej można wyróżnić dwie grupy rozwiązań, różniące się sposobem użytkowania przetworników. Systemy bazujące na dwóch przetwornikach – nadawczym i odbiorczym – są w aplikacjach komercyjnych spotykane nieporównanie rzadziej, niż w elektronice amatorskiej, gdzie za sprawą furory, jaką zrobił kultowy moduł HC-SR04, na rynku wciąż pojawiają się rozmaite klony i ulepszone wersje słynnego dalmierza (fotografia 20).
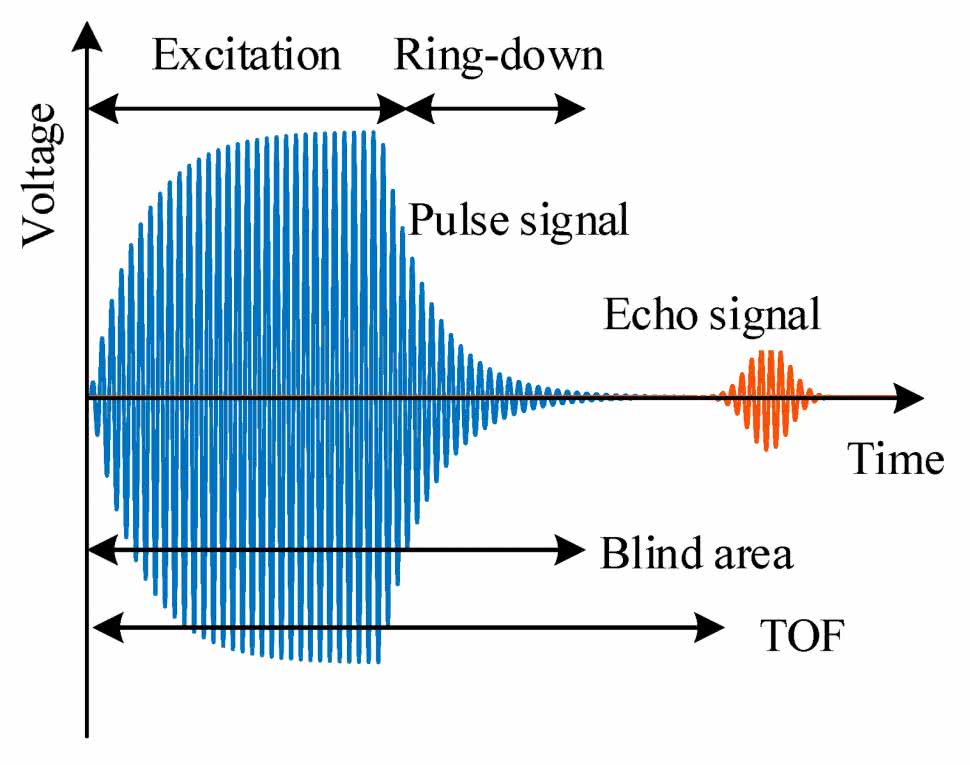
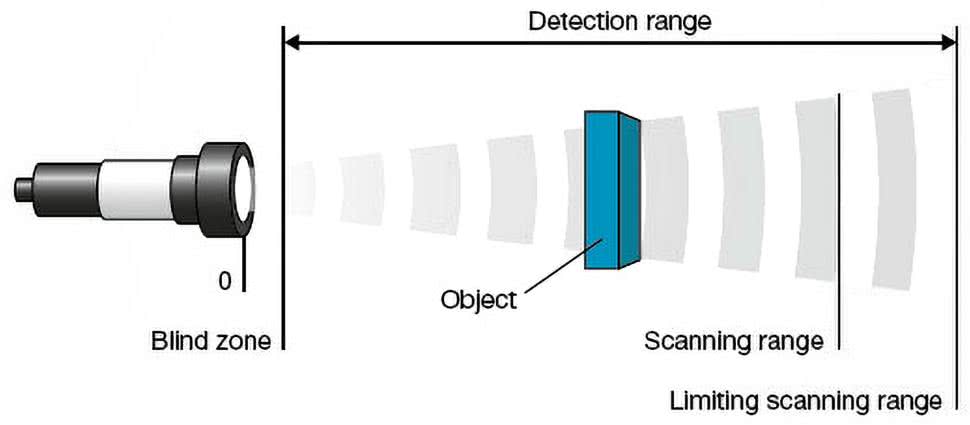
Z wielu względów znacznie lepsze okazują się jednak czujniki bazujące na pojedynczym przetworniku, pełniącym naprzemiennie rolę nadajnika i odbiornika fal ultradźwiękowych. Rzecz jasna, takie rozwiązanie wiąże się z koniecznością bardziej efektywnego wytłumienia drgań rezonansowych po zakończeniu paczki impulsów pobudzających (rysunek 18), co wpływa bezpośrednio na wielkość strefy martwej (tj. obszaru – znajdującego się tuż przed sensorem – w którym nie da się wykryć przeszkody z uwagi na zbyt silny udział drgań resztkowych z fazy nadawania – patrz rysunek 19).
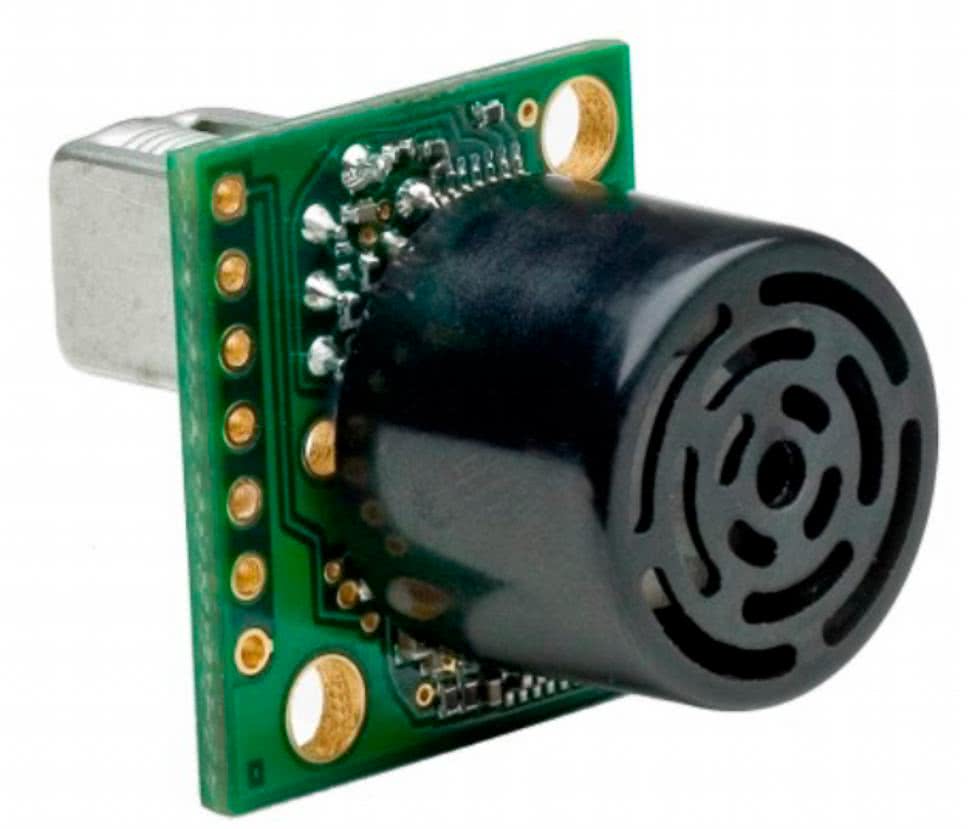
W zamian za tę niedogodność otrzymujemy jednak bardzo kompaktowe rozwiązanie, stosunkowo łatwe do uszczelnienia (co ma znaczenie np. w przypadku czujników parkowania) oraz nieporównanie prostsze w montażu. Czujniki jednoprzetwornikowe występują w różnorodnych wersjach – od niedrogich, prostych sonarów do podstawowych zastosowań (fotografia 21), aż po precyzyjne, przemysłowe czujniki z kompensacją termiczną (umożliwiające nawet synchroniczną współpracę wielu sensorów w jednym systemie – patrz fotografia 22).

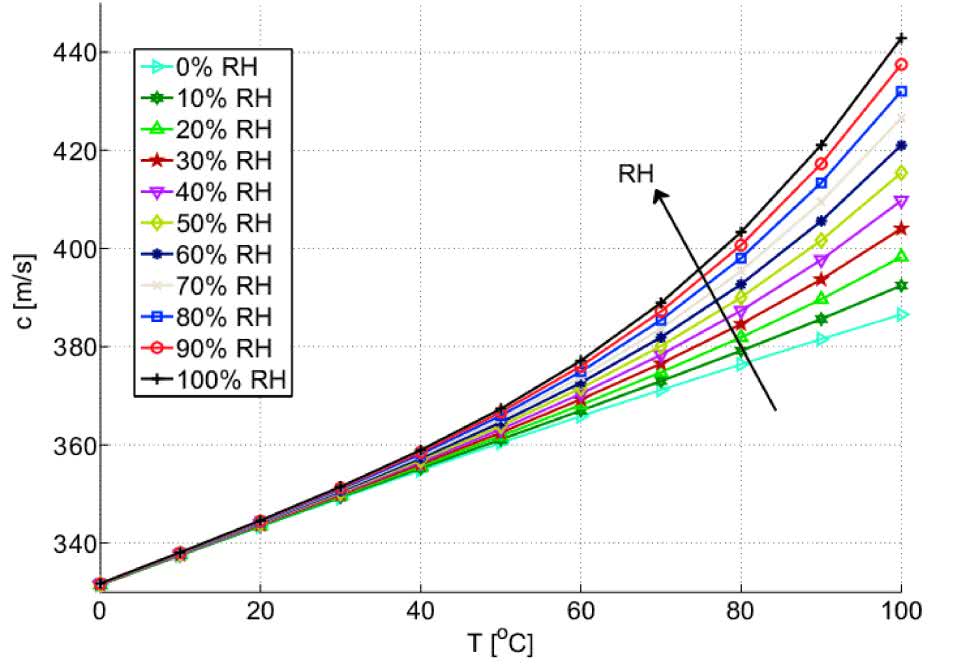
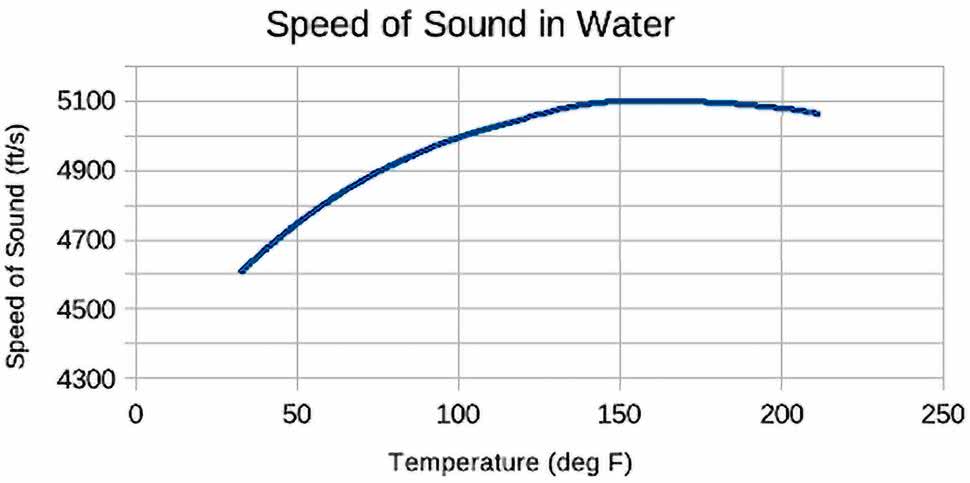
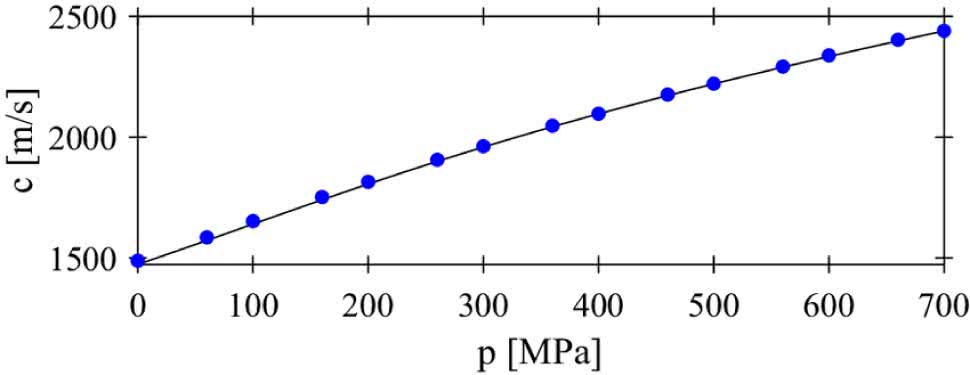
Istotną wadą dalmierzy bazujących na ultradźwiękach jest wzrost błędu pomiarowego podczas zmiany warunków otoczenia. Nie od dziś wiadomo, że prędkość dźwięku zależy – i to w dodatku nieliniowo – zarówno od temperatury, jak i wilgotności powietrza (rysunek 20) oraz (w mniejszym stopniu) od stężenia dwutlenku węgla, zaś w przypadku sonarów wodnych trzeba wziąć pod uwagę nie tylko zasolenie ośrodka (wpływające na jego gęstość, a co za tym idzie – także prędkość propagacji fal akustycznych), ale także temperaturę (rysunek 21) oraz ciśnienie (rysunek 22).
Radary mikrofalowe ToF
Zastosowanie fal radiowych do zdalnej detekcji obiektów jest znane od początku ubiegłego stulecia, a największy udział w rozwoju technik radarowych miało – jak to zwykle bywa – wojsko. W 1904 roku niemiecki wynalazca Christian Hülsmeyer pokazał, że istnieje możliwość wykrywania obiektów metalicznych z użyciem fal elektromagnetycznych, choć jego pierwsze próby detekcji statku w gęstej mgle nie pozwoliły na określenie dokładnej odległości (a jedynie na stwierdzenie faktu obecności okrętu w danym kierunku). Technika radarowa była jednak na tyle obiecująca, że w ciągu kolejnych trzech dekad rozwinięto ją do poziomu, pozwalającego na efektywne zastosowanie w warunkach bojowych.
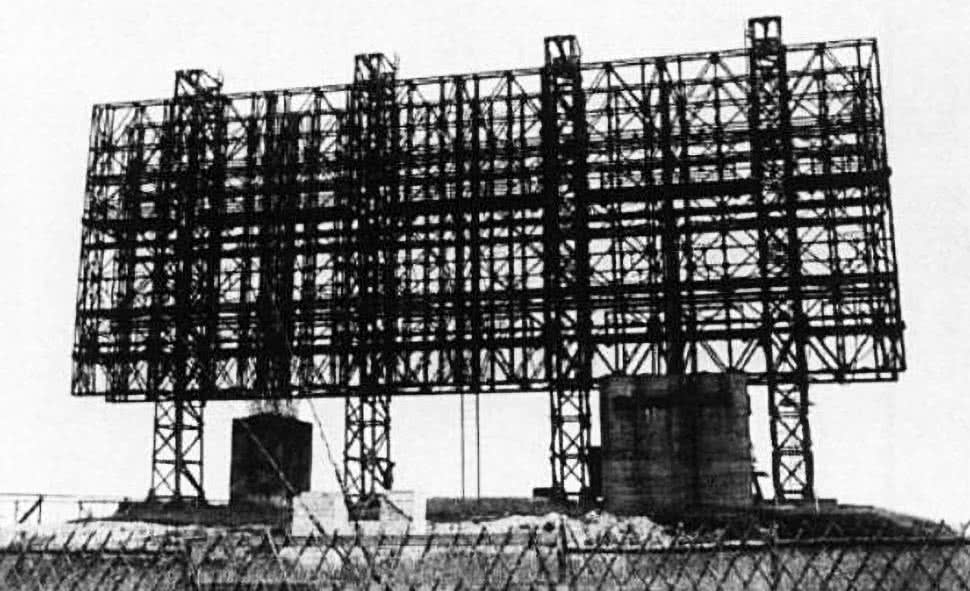
Mało tego – już pod koniec wojny Trzecia Rzesza dysponowała pierwszym na świecie radarem z szykiem fazowanym (FuMG 41/42 Mammut – fotografia 23), zdolnym do wykrywania celów lotniczych na odległość 300 km za pomocą fal radiowych w zakresie 120...150 MHz i to z dokładnością ±0,5°. Dziś ta technologia jest szeroko stosowana w systemach obrony przeciwlotniczej, kontroli ruchu powietrznego, aplikacjach kosmicznych, meteorologii, a nawet telekomunikacji (fotografia 24).

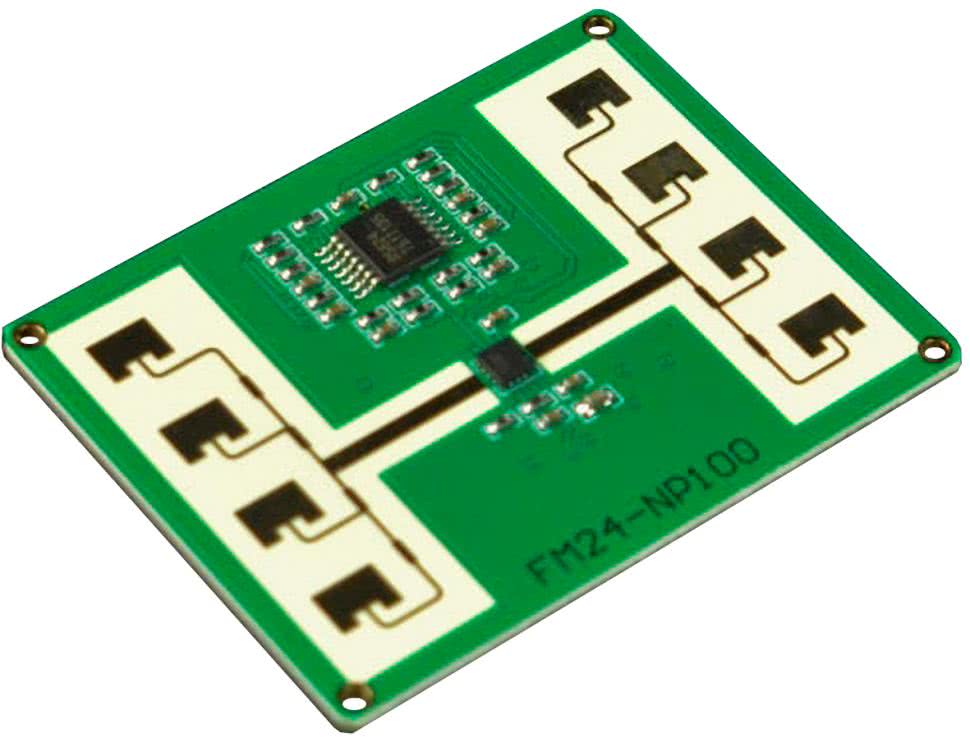
Zainteresowanie, jakie budzą kompaktowe radary mikrofalowe w zakresie aplikacji motoryzacyjnych, automatyki budynkowej i IoT, od dłuższego czasu napędza rozwój tego obszaru rynku, dzięki czemu niedrogie moduły do pomiaru odległości są coraz łatwiej dostępne w ofertach różnych producentów i dystrybutorów elektroniki. Dobrym przykładem może być moduł SEN0306 (fotografia 25) o rozmiarach 44×34 mm, pozwalający na pomiar odległości w przedziale od 50 cm do 20 metrów, przy użyciu mikrofal w paśmie K. Odczyt odbywa się z częstotliwością 10 Hz, zaś rozdzielczość pomiaru to 1 cm. Czujnik osiąga dokładność rzędu ±10 cm.
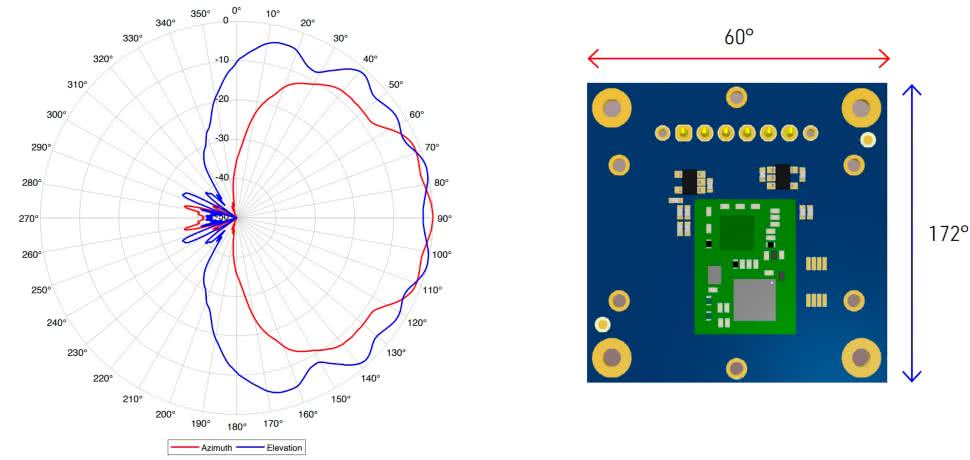
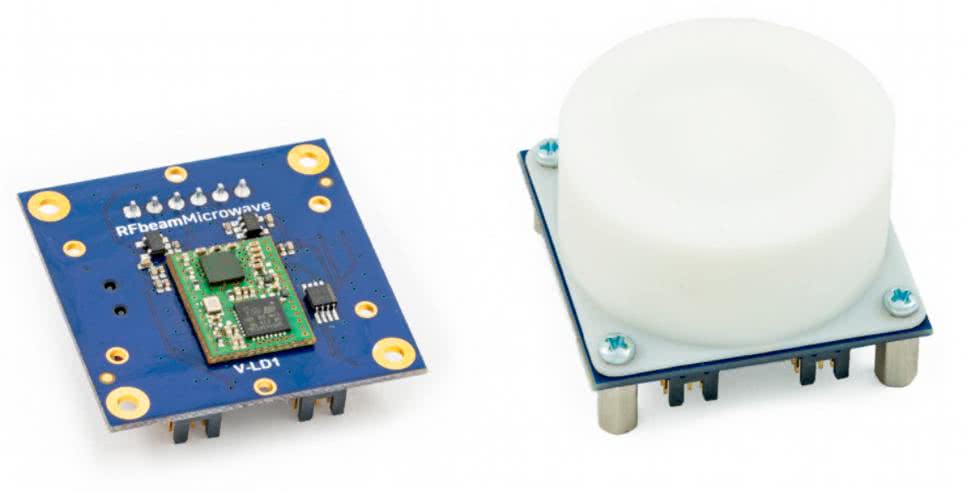
Jeszcze lepsze osiągi oferuje miniaturowy moduł SMD o wymiarach 16×12 mm – V-LD1 marki RFbeam Microwave GmbH (fotografia 26).
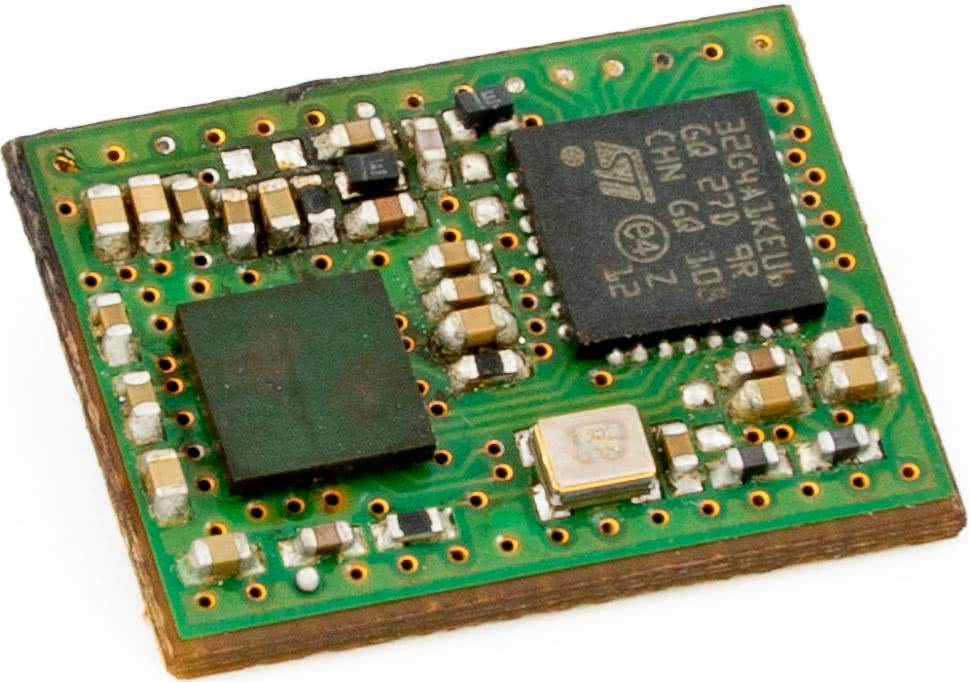
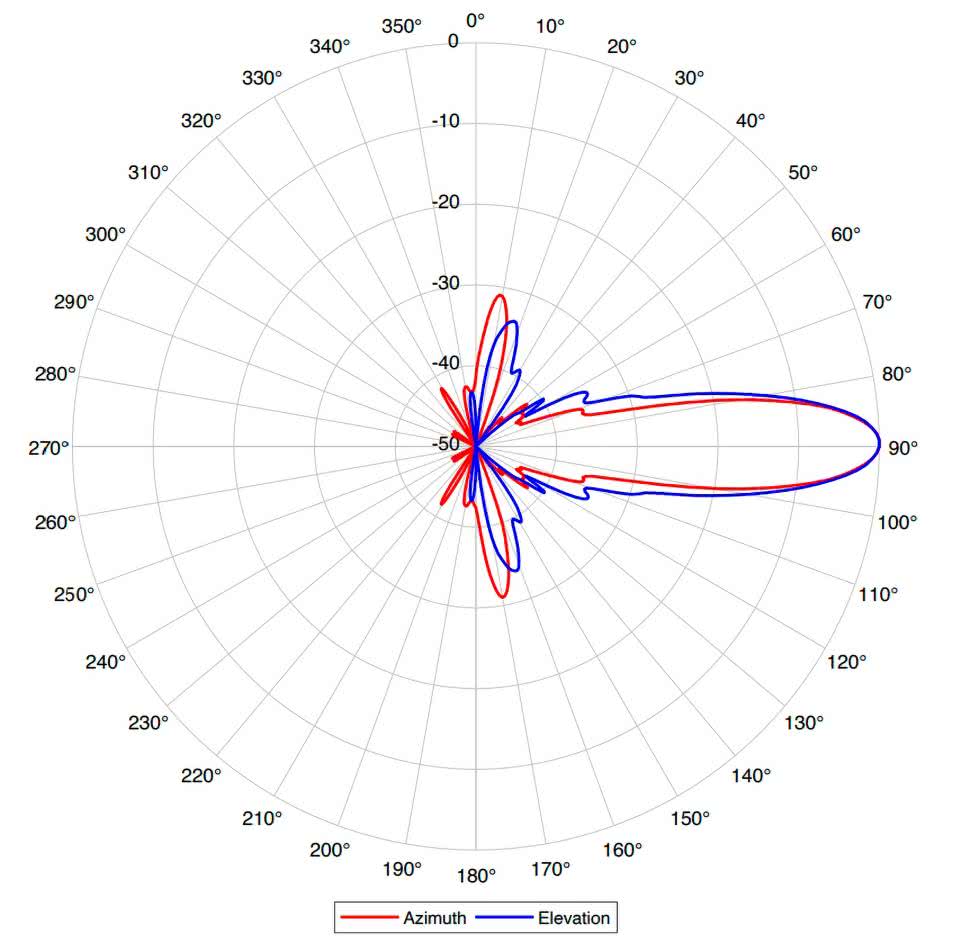
Urządzenie, bazujące na nowoczesnym układzie RF typu ASIC, wspieranym przez procesor z serii STM32G4, jest w stanie osiągnąć zakres pomiarowy rzędu nawet 50 metrów, jednak do tego celu konieczne jest zastosowanie specjalnej, polimerowej soczewki (fotografia 27), znacząco poprawiającej charakterystykę kierunkową anteny (por. rysunki 23 i 24).
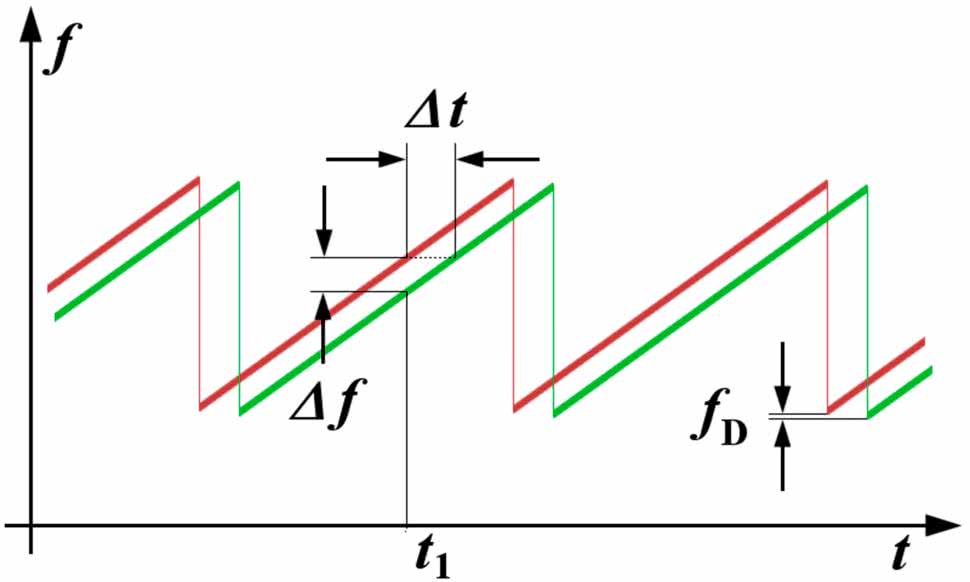
Warto zwrócić uwagę na fakt, że udział radarów impulsowych (opierających się tylko na pomiarze czasu przelotu fali) znacząco zmalał z uwagi na liczne problemy, jakie ta technologia stwarzała inżynierom, w szczególności w sektorze wojskowym (z uwagi na konieczność stosowania nadajników o ogromnej mocy chwilowej). Dziś szeroko stosowane są natomiast odmiany oryginalnej koncepcji, wykorzystujące zjawisko Dopplera: radary typu pulse-Doppler oraz MTI (Moving Target Indicator) są cennym narzędziem w aplikacjach militarnych czy też meteorologicznych. W przypadku czujników radarowych małej mocy stosowana jest natomiast fala ciągła z modulacją częstotliwościową (FMCW) – tak działają m.in. wspomniane wcześniej moduły SEN0306 oraz V-LD1.
Zasada działania radarów FMCW bazuje na pomiarze przesunięcia częstotliwości pomiędzy sygnałem nadanym, a odebranym (rysunek 25), przy czym owo przesunięcie zależy od odległości – im dalej znajduje się obiekt, tym większe opóźnienie, a zatem także – większe przesunięcie częstotliwości.
Poszczególne implementacje różnią się m.in. kształtem przebiegu modulującego (sinusoida, fala trójkątna lub piłokształtna – rysunek 26), a – co ważne – zasięg pomiaru jest odgórnie ograniczony przez częstotliwość modulacji. Warto dodać, że na błąd pomiaru wpływa efekt Dopplera – przykładowo, jeżeli obiekt odbijający falę w kierunku radaru jest w ruchu względem anteny, to odbiornik pozyska sygnał nieco przesunięty w dziedzinie częstotliwości, zaś przesunięcie to będzie zależne od prędkości ruchu oraz częstotliwości nośnej.
Optyczne sensory triangulacyjne
Drugą – obok ToF – grupą metod pomiaru odległości są wszelkiego rodzaju techniki bazujące na zależnościach geometrycznych. Triangulacja – bo o niej mowa – korzysta z pośredniego pomiaru kąta propagacji fal, odbitych od obiektu, a jedną z najprostszych jej realizacji są analogowe i cyfrowe czujniki odległości marki Sharp (rysunek 27, fotografia 28).
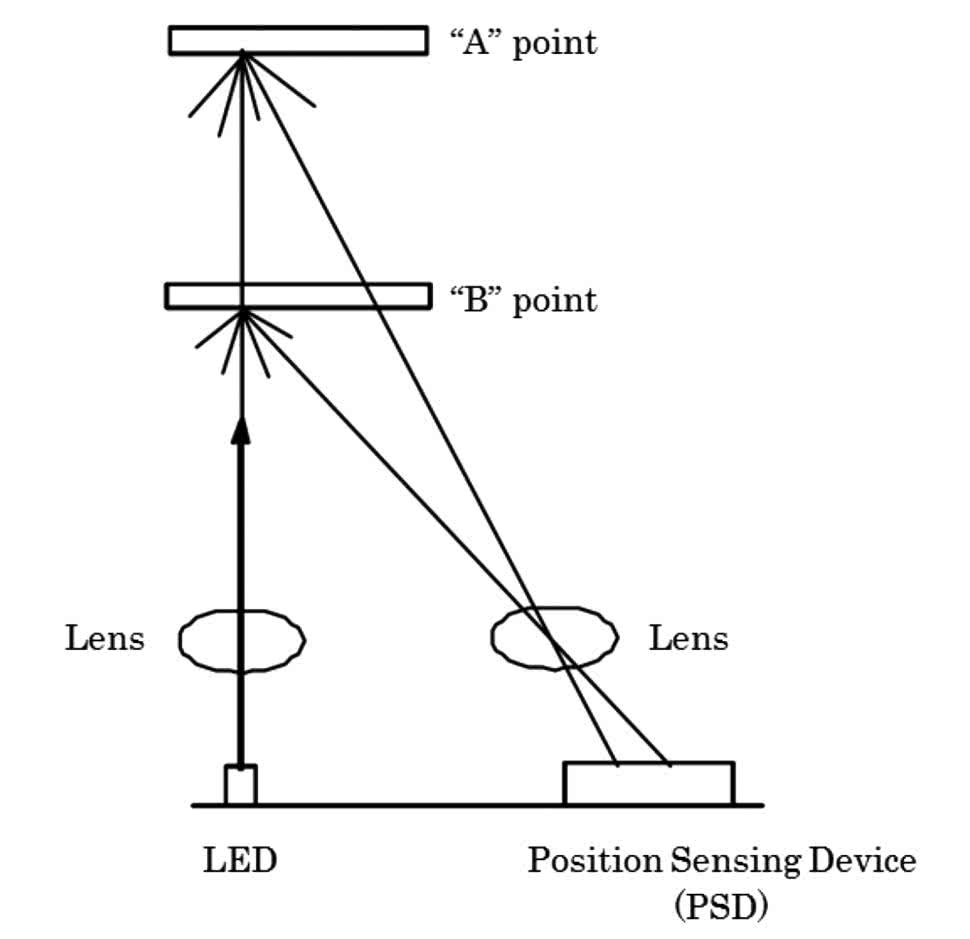

Zasada ich działania bazuje na detektorach typu PSD, czyli specjalnych fotodiodach czułych na położenie plamki podczerwieni, padającej na strukturę światłoczułą – im dalej jest położony obiekt, odbijający promienie z dobrze skolimowanej diody LED IR, tym bliżej nadajnika pada punkt świetlny na powierzchnię detektora. Taka konstrukcja jest wprawdzie dość prosta pod względem elektronicznym, ale – niestety – generuje niejednoznaczną i silnie nieliniową odpowiedź (rysunek 28).
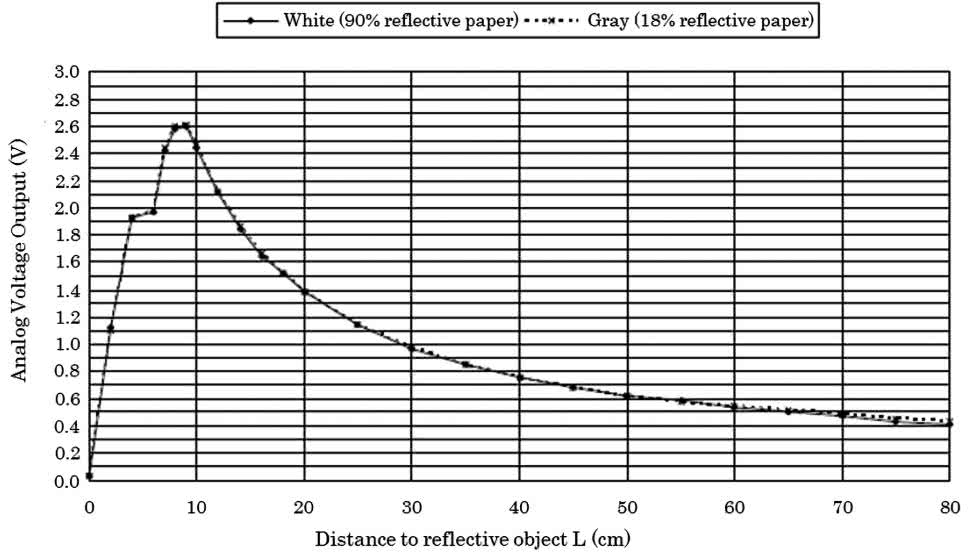
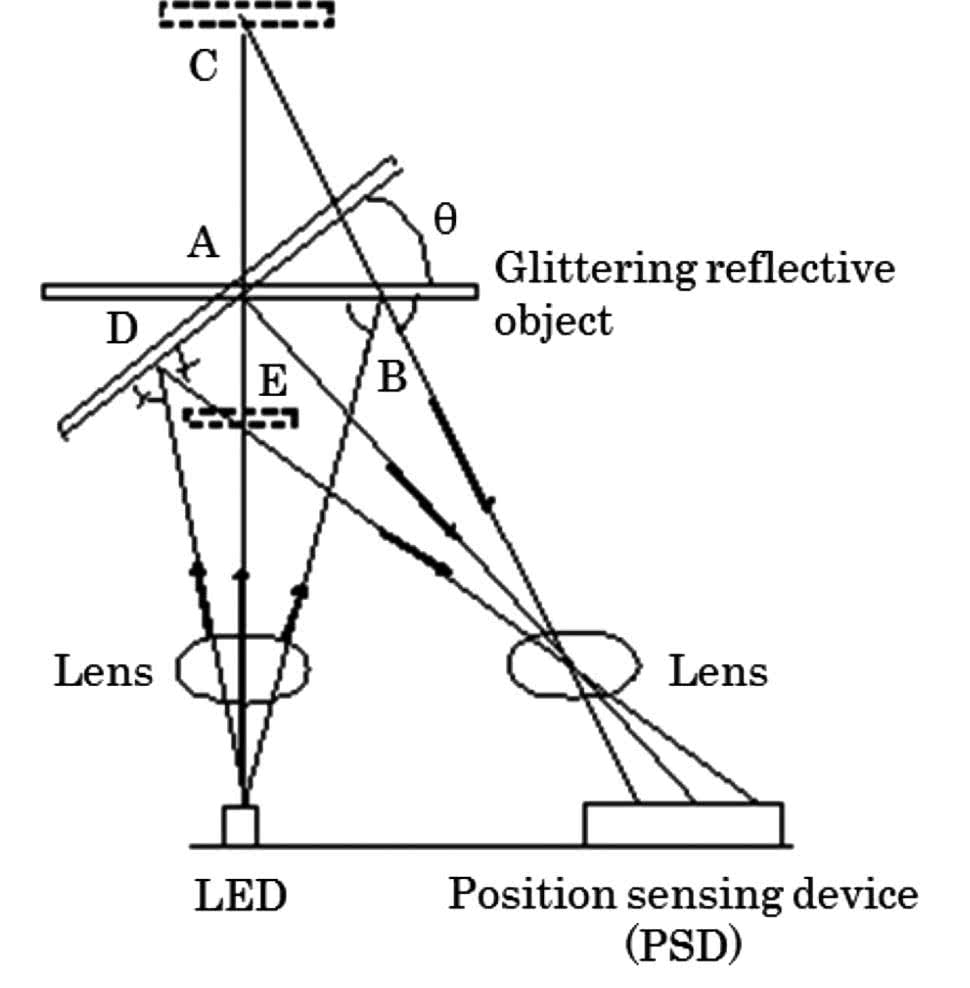
Niejednoznaczność wynika zarówno z artefaktów, powstających w bliskim zakresie odległości (poniżej pewnego progu, określającego dolny limit zasięgu danego modelu czujnika, sensor odpowiada napięciem takim samym, jak dla dalej położonych obiektów), jak i ze specyficznych warunków pracy czujnika. W szczególności jest to widoczne dla obiektów silnie odbijających światło (np. szkła) – przechylenie powierzchni względem osi optycznej sensora powoduje powstanie zafałszowanych wyników, co zobrazowano na rysunku 29.
Co ciekawe, ten sam problem może wystąpić także w znacznie dokładniejszych (i nieporównanie droższych), laserowych czujnikach przemieszczenia, stosowanych w precyzyjnej aparaturze przemysłowej (rysunek 30).
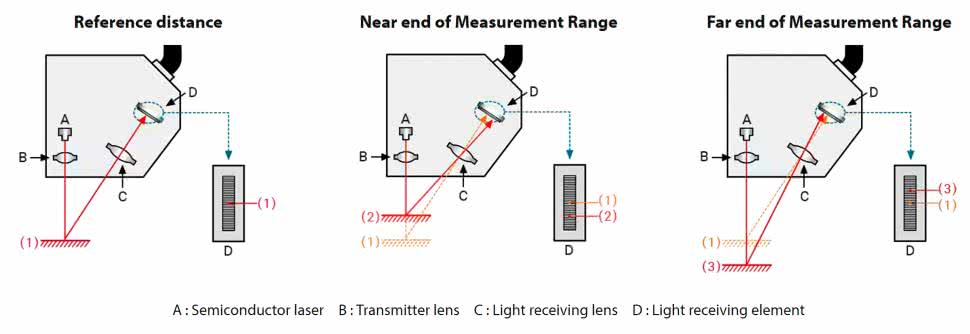
Choć w tym przypadku stosowane są już nie detektory PSD, ale cyfrowe matryce jedno- lub dwuwymiarowe (rysunek 31), to efekt jest dokładnie taki sam – jeżeli czujnik współpracuje z powierzchnią rozpraszającą światło, błąd związany z kątem przechylenia nie wystąpi, ale w przypadku, gdy wykrywany obiekt ma błyszczące wykończenie, geometria układu bez trudu oszuka sensor.
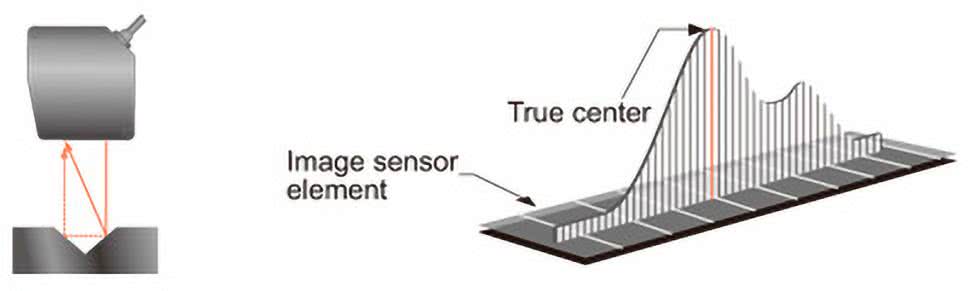
Na szczęście, zastosowanie analizy histogramu pozwala poradzić sobie z innymi błędami, występującymi np. podczas pomiaru wąskich rowków, powodujących powstawanie dodatkowych odbić (echo w sygnale optycznym, pozyskiwanym przez matrycę – rysunek 32). Zaletą czujników triangulacyjnych jest szeroki zakres pomiarowy i duża odległość bazowa – przykładowo, niektóre sensory z serii HG-C marki Panasonic mogą mierzyć odległość w zakresie 200...600 mm z powtarzalnością na poziomie 300...800 µm.
Pomiary konfokalne i spektralne
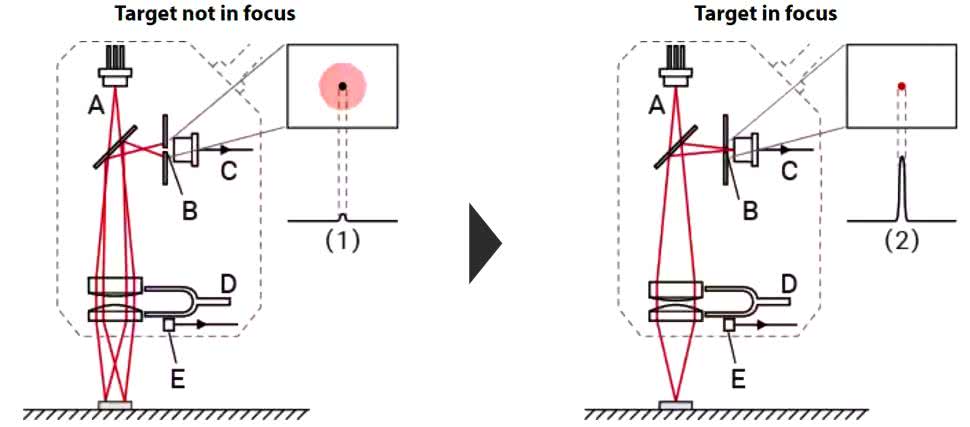
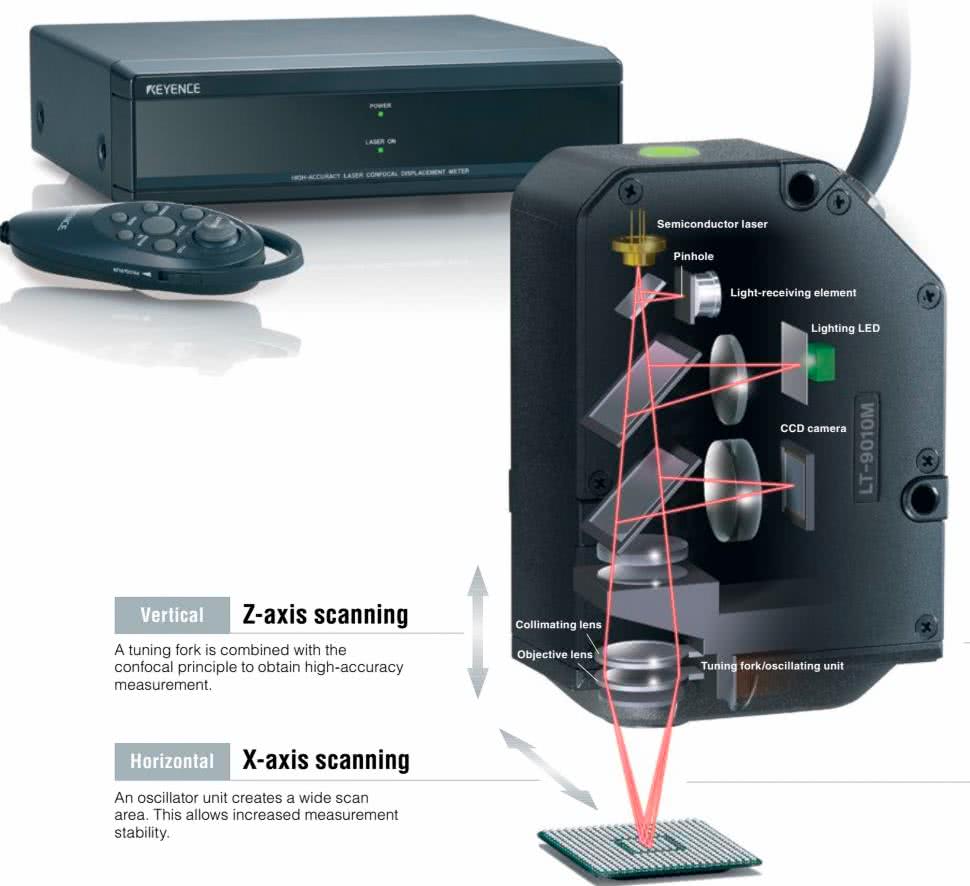
Warto dodać, że zasygnalizowany wcześniej problem artefaktów pochodzenia geometrycznego skłonił inżynierów do opracowania innych topologii czujników laserowych. Metoda konfokalna (rysunek 33) bazuje na zastosowaniu przestrajanego układu optycznego, oscylacyjnie zmieniającego położenie soczewek obiektywu. Laser oświetla badaną powierzchnię za pośrednictwem obiektywu, przez który powraca też odbita od niej część wiązki. Za sprawą przesłony typu pinhole, detektor rejestruje jednak nie pełny obraz plamki, a tylko jej centralną część. Jeżeli zatem oscylator znajdzie się w położeniu, w którym plamka zostanie idealnie zogniskowana na powierzchni detalu, detektor odbierze silny impuls światła (prawa część rysunku 33). W przeciwnym wypadku obraz rozmyje się, co spowoduje znaczący spadek jasności sygnału. Położenie soczewek w punkcie maksimum natężenia światła odbitego jest zatem pośrednią miarą odległości detalu od czujnika.
Zaletą systemów konfokalnych jest możliwość pracy ze znacznie lepszą rozdzielczością i wyższą odpornością na artefakty, powstające w wyniku skomplikowanych zależności geometrycznych pomiędzy wiązką lasera, a powierzchnią badanego detalu. Zastosowanie dodatkowego oscylatora w jednej z osi poziomych (X na rysunku 34) pozwala na dalsze zwiększenie możliwości aplikacyjnych w zakresie skanowania powierzchni (np. w systemach kontroli jakości, obrazowaniu profilu struktur mikroelektronicznych, itd.). Niestety, czujniki tego typu mają także znacznie bardziej ograniczony zasięg pracy, przez nadają się one tylko do zastosowań precyzyjnych (przykładowo – modele LT-9010M oraz LT-9010 marki Keyence oferują obszar skanowania głębokości w zakresie ±0,3 mm przy odległości bazowej równej 6 mm).
Inną grupą czujników konfokalnych są sensory spektralne (rysunek 35). W tym przypadku wiązka światła białego jest niejako rozszczepiana w taki sposób, że poszczególne długości fali ogniskują się na różnych głębokościach, a odczyt jest dokonywany za pomocą spektroskopu, analizującego piki widma w wiązce światła powracającego od badanego obiektu.
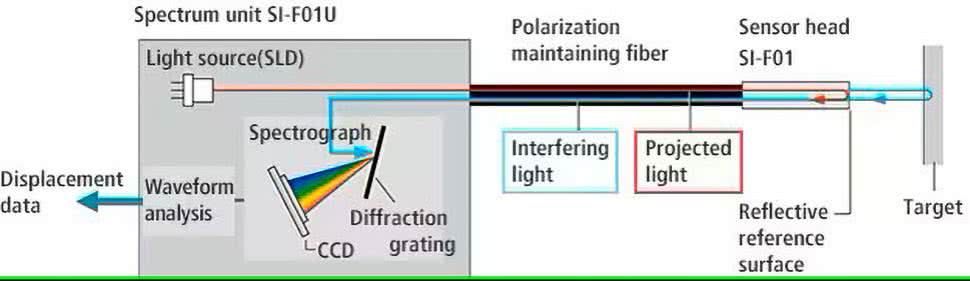
Niezwykle istotną zaletą tego typu rozwiązań jest możliwość znacznego zmniejszenia rozmiarów głowicy pomiarowej dzięki zastosowaniu technik światłowodowych – w ten sposób integratorzy systemów mogą znacznie gęściej upakować czujniki w niewielkiej przestrzeni, co ma znaczenie w niektórych zaawansowanych aplikacjach przemysłowych oraz laboratoryjnych (rysunek 36).

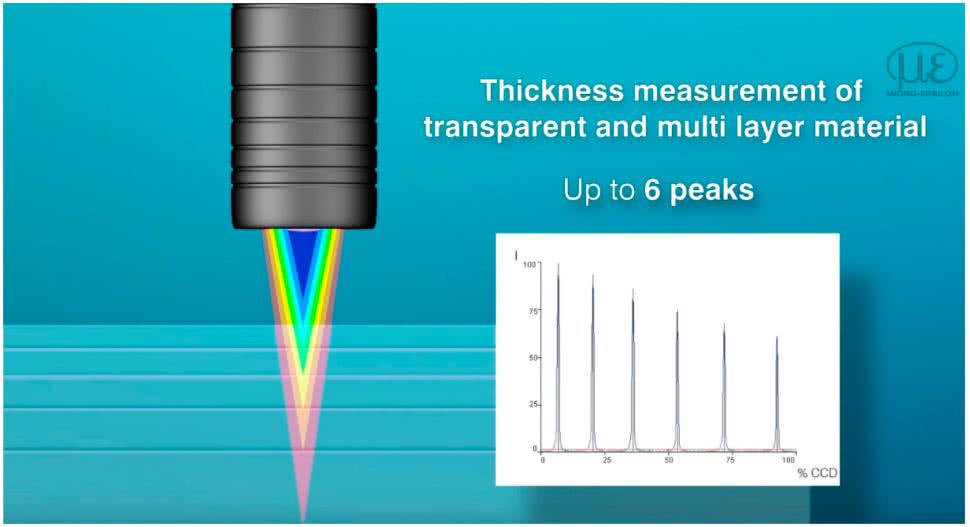
Mało tego – niektóre czujniki spektralne są w stanie wskazywać grubość kolejnych pięter materiałów wielowarstwowych (rysunek 37), używając do tego celu odbicia światła od granic kolejnych ośrodków.
Stereowizja i skanowanie 3D ze światłem strukturalnym
Triangulacja może być z powodzeniem zrealizowana nie tylko na pojedynczych wiązkach światła, ale także na dwuwymiarowych obrazach – i w ten najprostszy sposób można chyba przejść do opisu stereowizji, będącej w istocie... bioniczną realizacją ludzkiego (i nie tylko) zmysłu wzroku.
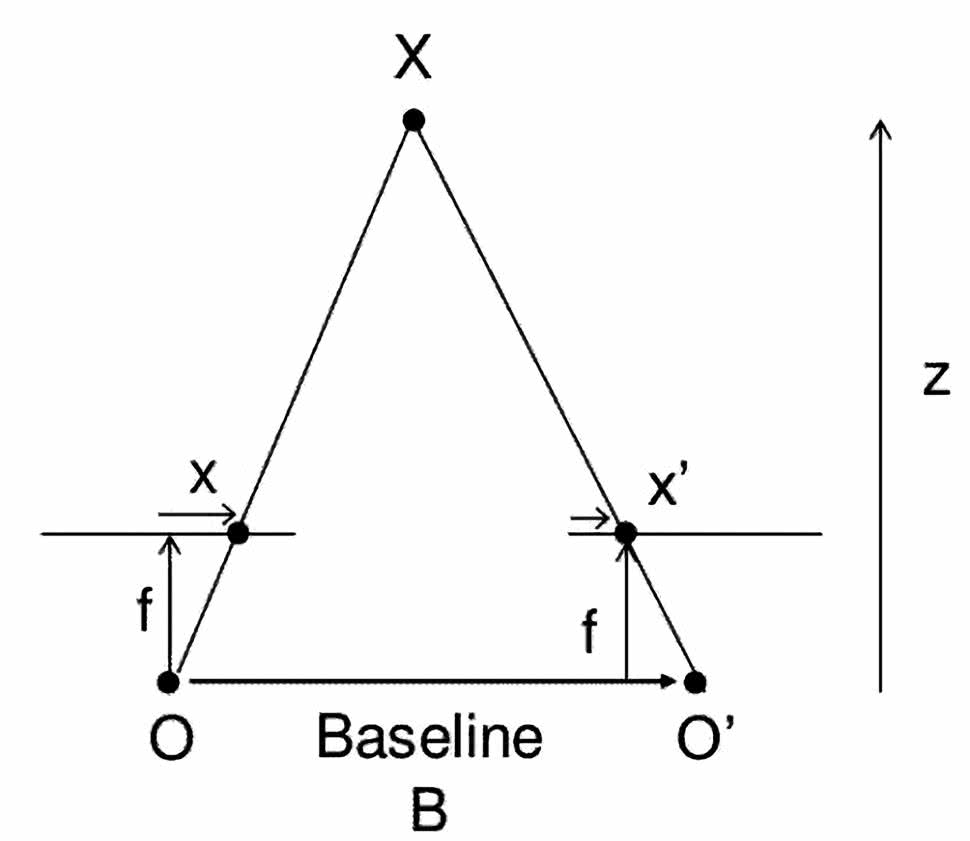
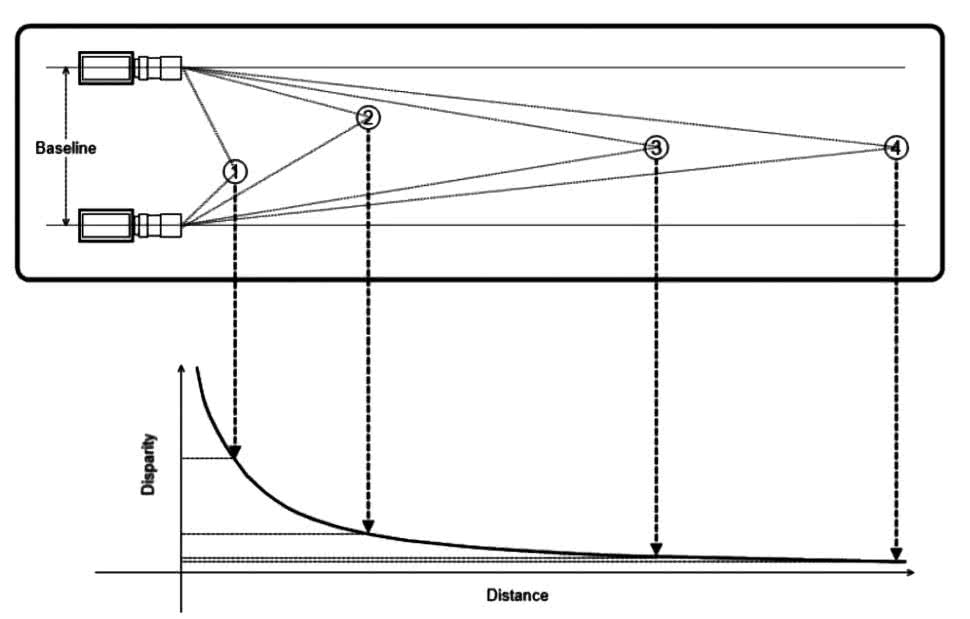
Podstawowe założenia stereowizji można zwizualizować za pomocą trójkąta (rysunek 38), w którego dwóch wierzchołkach (O i O’) znajdują się kamery, oddalone o pewną stałą odległość równą B. Obraz punktu X jest rzutowany na matryce w różnych ich punktach, a rozrzut pomiędzy współrzędnymi punktu w obu obrazach (x oraz x’) stanowi pośrednią miarę odległości Z (głębi), będącej przedmiotem zainteresowania stereowizji.
Rzecz jasna, w praktyce sprawa nie jest aż tak prosta, jak mogłoby się wydawać – i to nie tylko z uwagi na fakt, iż wyznaczenie mapy odległości wymaga dość zaawansowanych metod rozpoznawania obrazu (trzeba przecież najpierw wykryć odpowiadające sobie punkty w obu widokach). Istnieje wszak jeszcze jeden szkopuł – owa różnica pomiędzy położeniem odpowiadających sobie logicznie punktów w obydwu obrazach drastycznie maleje wraz ze wzrostem rzeczywistej odległości przedmiotu od kamer (rysunek 39). Oznacza to, że w praktyce stereowizja najlepiej sprawdza się dla bliskiego otoczenia, podczas gdy obiekty w tle zlewają się w miarę oddalania od kamer – w większości praktycznych zastosowań tej techniki, nie jest to jednak szczególnie istotny problem.
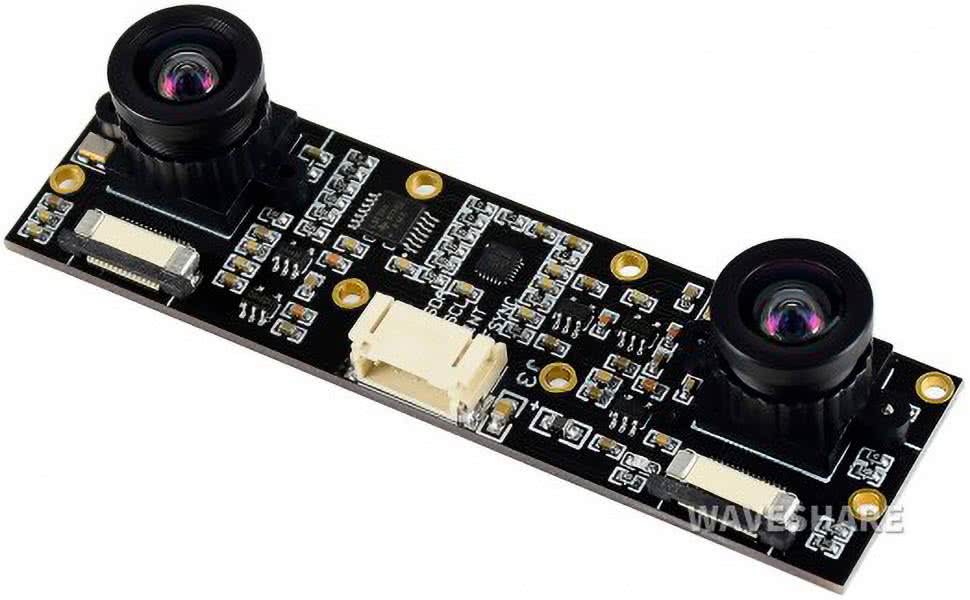
Stereowizja może być z powodzeniem zrealizowana na bazie niewielkich modułów kamer – dobrym punktem wyjścia może być platforma IMX219-83, oferowana przez markę Waveshare (fotografia 29) – dwa sensory obrazu Sony IMX219 o rozdzielczości 8 MPx każdy (3280×2464 px) są rozstawione na odległość 60 mm i zapewniają kompatybilność z minikomputerami jednopłytkowymi z serii Nvidia Jetson Nano oraz Raspberry Pi Compute Module.
Swego rodzaju odmianą technik stereowizyjnych jest obrazowanie z użyciem światła strukturalnego. Idea metody jest zaskakująco prosta – zamiast rejestrować obraz z dwóch kamer, korzystamy tylko z jednego czujnika obrazu, podczas gdy rolę drugiego przejmuje projektor, oświetlający obiekt światłem o znanej strukturze barwnej lub geometrycznej (rysunek 40).
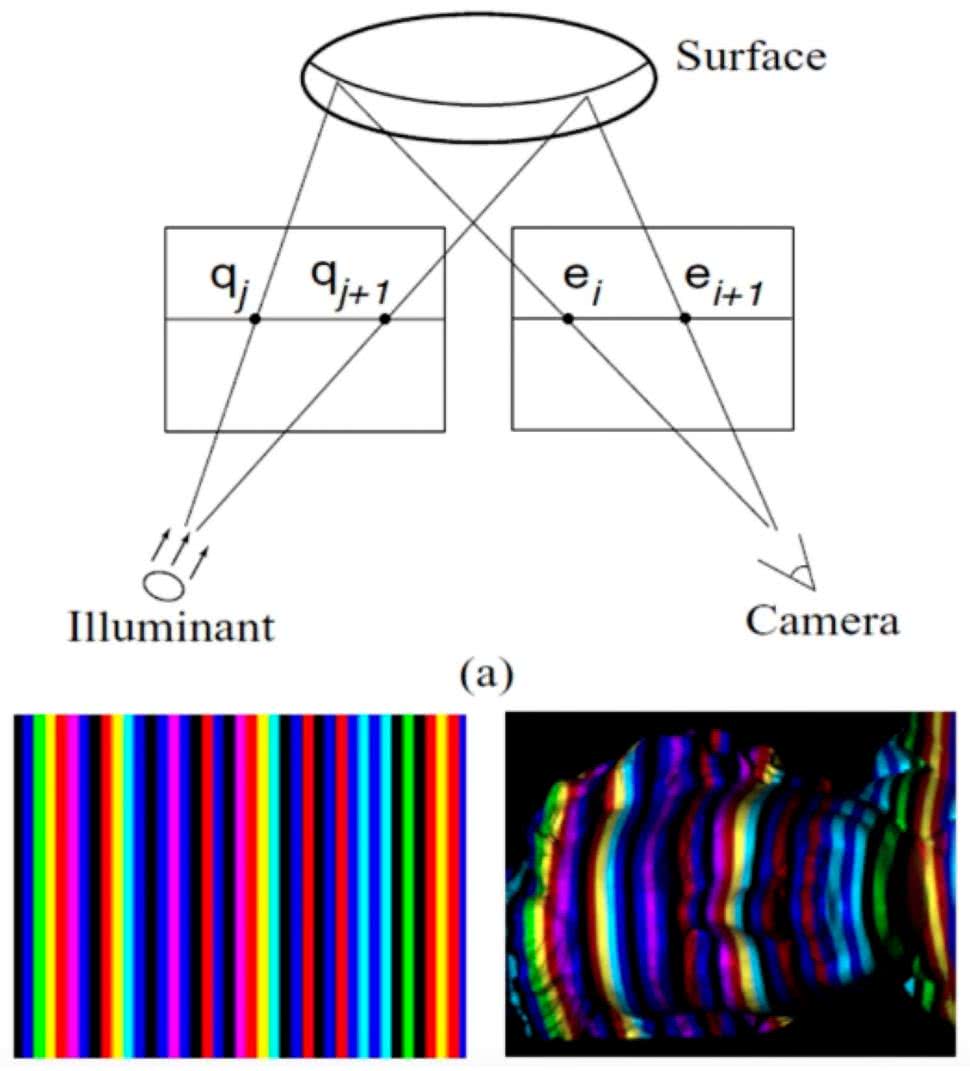
Możemy więc przyjąć założenie, że obraz z drugiej, wirtualnej kamery to po prostu rzutowana przez projektor sekwencja pasków bądź punktów – reszta (obliczenia triangulacyjne) odbywa się na zasadzie analogicznej do poprzednio opisanej, klasycznej stereowizji. Systemy bazujące na świetle strukturalnym są szeroko stosowane w skanerach 3D, choć od pewnego czasu można je znaleźć nawet… w smartfonach – system zastosowany przez markę Apple oświetla twarz użytkownika tysiącami punktów podczerwieni (rzecz jasna, generowanych z użyciem laserów VCSEL), a wielkość plamek zarejestrowanych przez kamerę jest w istocie miarą odległości danego punktu od telefonu (fotografia 30).

Pomiary prędkości liniowej
Teoretycznie każda z metod pomiaru odległości może być też stosowana do pomiaru prędkości liniowej – wystarczy wszak dwukrotnie zmierzyć dystans, dzielący poruszający się obiekt od dalmierza, a następnie podzielić uzyskaną w ten sposób różnicę odległości przez różnicę czasu pomiędzy pomiarami. Mało tego – jeszcze prostsze rozwiązanie jest często stosowane np. w aplikacjach balistycznych, w których tzw. chronografy strzeleckie (fotografia 31) obliczają prędkość pocisku na podstawie czasu jego przelotu pomiędzy dwiema barierami optycznymi, umieszczonymi w stałej, znanej odległości.

Znacznie większe możliwości i zdecydowanie większą elastyczność (w porównaniu do barier optycznych) daje zastosowanie technik dopplerowskich, wykorzystujących przesunięcie częstotliwości fali odbitej od poruszającego się obiektu. Podobnie, jak w przypadku metod ToF, także i tutaj te same zjawiska leżą u podwalin wielu różnych technologii – do wyboru mamy zarówno Dopplery mikrofalowe, jak i ultradźwiękowe, a nawet optyczne (laserowe).
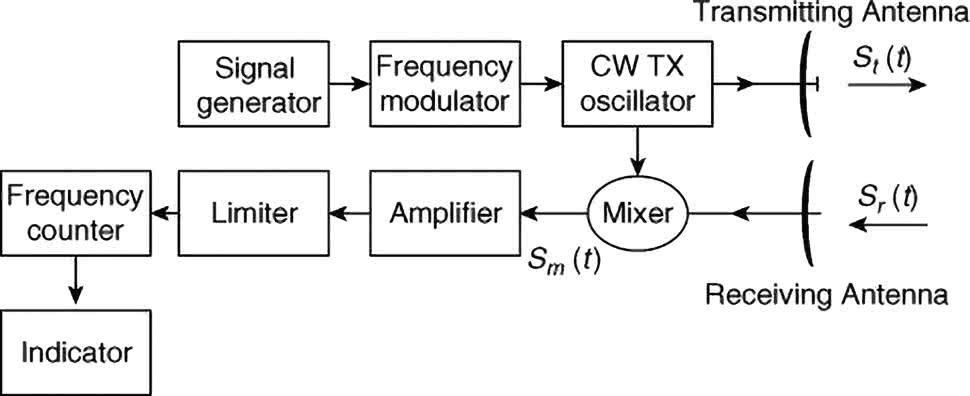
Radary dopplerowskie z falą ciągłą
Konstrukcja klasycznego radaru dopplerowskiego jest stosunkowo prosta i bazuje na emisji niemodulowanej fali ciągłej o częstotliwości nośnej (zwykle w przedziale od kilku do kilkudziesięciu gigaherców). Fala odbita od poruszającego się (w kierunku do lub od radaru) obiektu ma – za sprawą efektu Dopplera – nieco zmienioną częstotliwość. Wystarczy zatem zmieszać obydwa sygnały (nośną oraz sygnał powrotny), a wynikowy przebieg będzie zawierał informację o długości i zwrocie wektora prędkości w kierunku obiekt-radar.
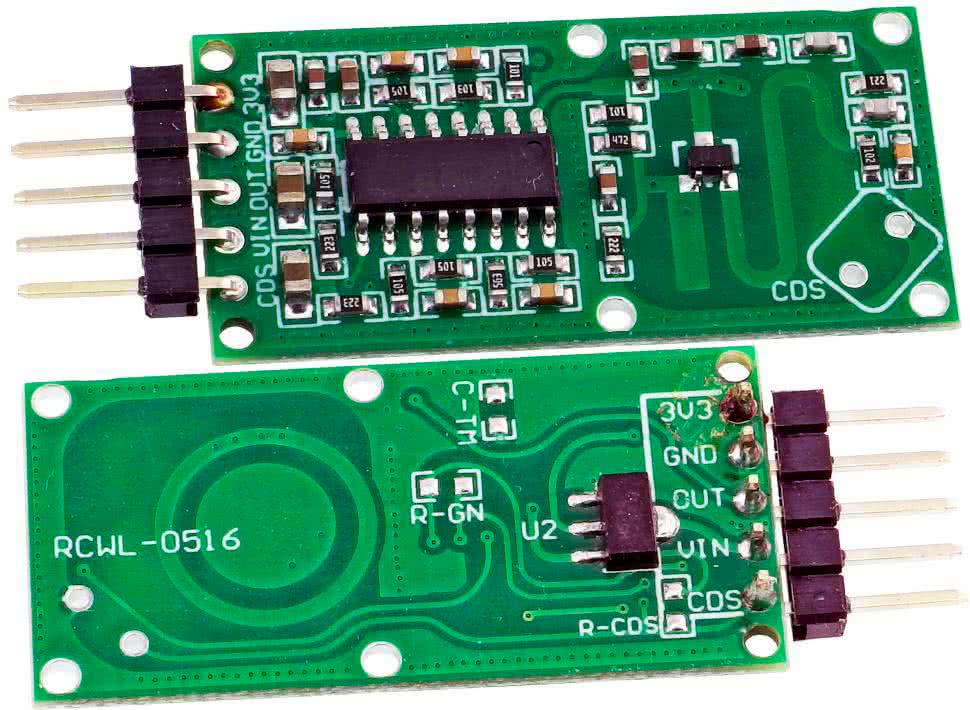
Warto zauważyć, że tego typu radary Dopplerowskie mogą być znacznie prostsze w konstrukcji, niż radary pulse-Doppler, a nawet omówione wcześniej konstrukcje FMCW – tutaj mamy bowiem do czynienia z włączonym przez cały czas oscylatorem, którego częstotliwość nie musi być w żaden sposób kluczowana bądź przestrajana. Z tego właśnie względu topologia radaru dopplerowskiego fali ciągłej (CW) zyskała w ostatnich latach niebywałą popularność – na tej zasadzie działają m.in. wszechobecne już, mikrofalowe czujniki ruchu (przykłady można zobaczyć na fotografii 32 i rysunku 41).
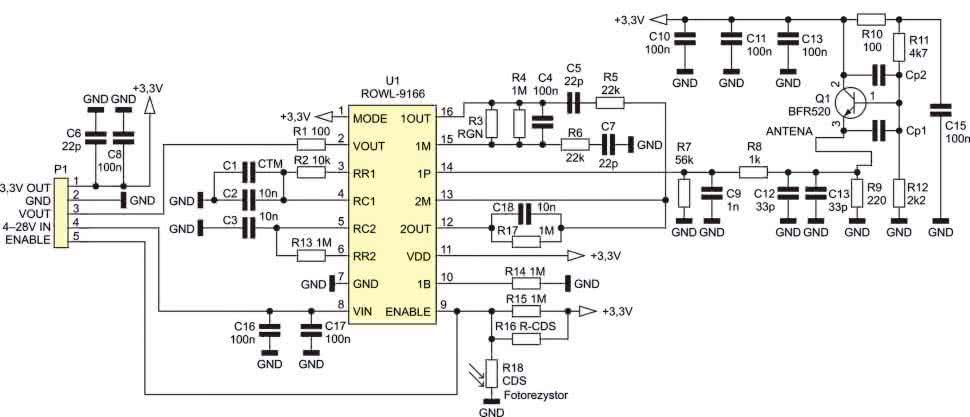
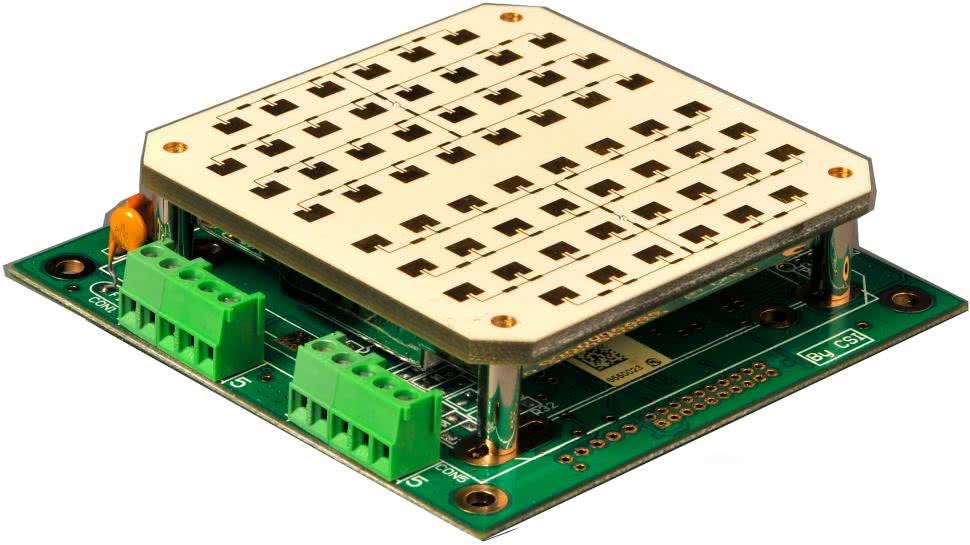
Wysokiej klasy moduły radarowe OEM są stosowane także w zastosowaniach drogowych, np. w celu monitorowania prędkości pojazdów – przedstawiony na fotografii 33 moduł OEM umożliwia pomiar prędkości samochodów osobowych z odległości do 120 metrów lub pojazdów ciężarowych z 250 metrów, przy czym zakres mierzonych prędkości wynosi od 5 do 300 km/h, zaś kąt propagacji wiązki to 12×24°.
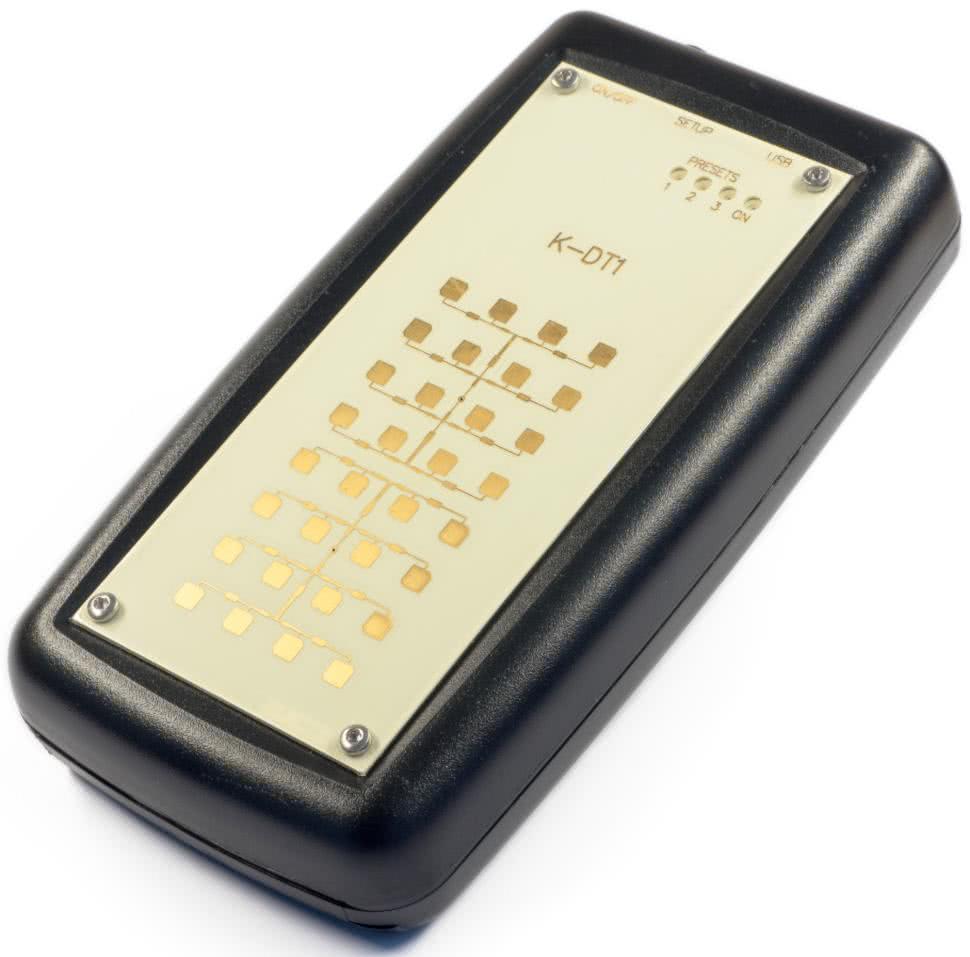
Jako ciekawostkę warto dodać, że moduły tego typu mogą być walidowane za pomocą interesujących urządzeń, pełniących rolę symulatorów efektu dopplerowskiego – przykład takiego testera, przystosowanego do pracy w paśmie 24 GHz, można zobaczyć na fotografii 34.
Dopplerowskie techniki ultradźwiękowe i laserowe
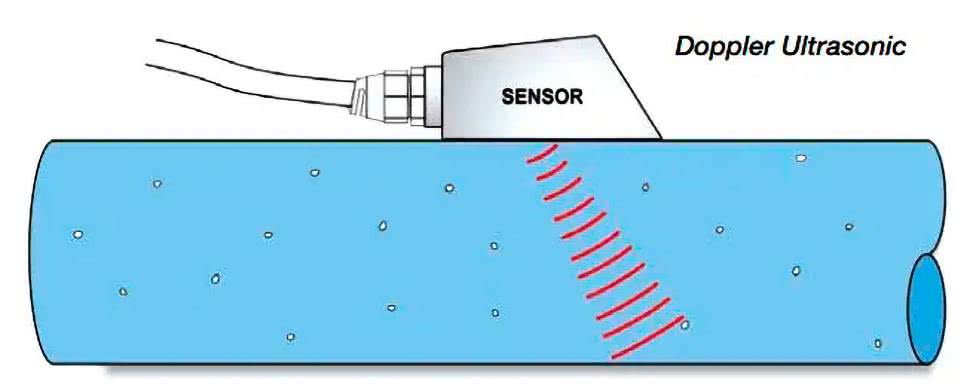
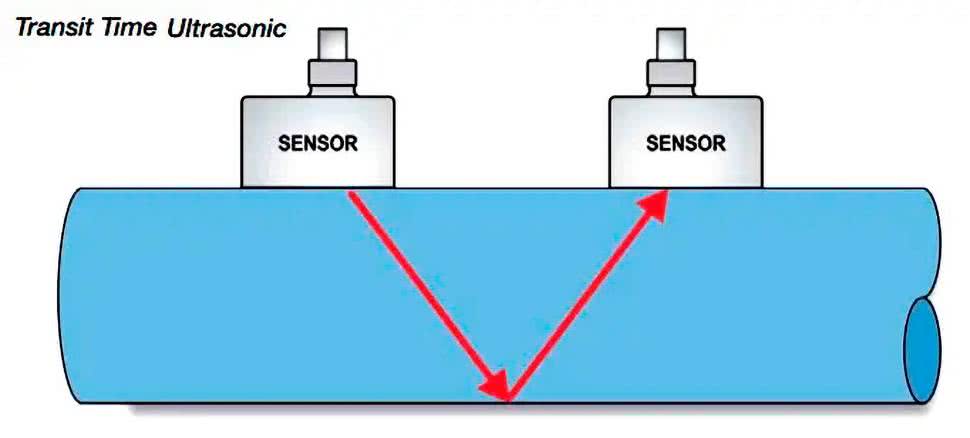
Co ciekawe, choć w starszej literaturze dla elektroników można znaleźć przykłady zastosowań ultradźwięków do wykrywania ruchu w pomieszczeniach, to w praktyce techniki takie są niemalże całkowicie zapomniane. Fale naddźwiękowe znalazły jednak swoje miejsce w pomiarach prędkości przepływu mediów (cieczy i gazów) w rurociągach, choć w tym przypadku stosowane są dwie techniki – dopplerowska (rysunek 42) oraz bazująca na pomiarze czasu propagacji wiązki pomiędzy nadajnikiem, a odbiornikiem (czas ten jest modulowany przez kierunek oraz prędkość przepływu medium – rysunek 43).
Podobną technikę można zresztą znaleźć w konstrukcjach niektórych wiatromierzy, zawierających dwie pary przetworników ultradźwiękowych, ułożonych ortogonalnie względem siebie pod niewielkim zadaszeniem (fotografia 35). Rozwiązanie to ma szereg zalet w stosunku do wiatromierzy mechanicznych, a bodaj największą jest całkowicie statyczna konstrukcja oraz zerowa bezwładność, znacząco poprawiająca dynamikę pomiaru.

Dla ścisłości należy też wspomnieć o aplikacjach medycznych, w których efekt Dopplera jest używany do pomiaru i obrazowania prędkości przepływu krwi w naczyniach krwionośnych, a także do pomiaru tętna płodu w detektorach przenośnych oraz kardiotokografach – zagadnienia te wykraczają jednak daleko poza ramy niniejszego artykułu.
Dopplerowskie techniki laserowe także znalazły szereg zastosowań praktycznych w detekcji ruchu – choć zdecydowanie częściej wykorzystuje się je w wibrometrii laserowej, to istnieją także specjalistyczne urządzenia, pozwalające na pomiar prędkości przesuwających się (np. na taśmie produkcyjnej) obiektów. Moduły określane mianem LSV (Laser Surface Velocimeter) (fotografia 36) rzutują na badaną powierzchnię dwie wiązki światła laserowego, tworzące strukturę prążków interferencyjnych. Ruch powierzchni obiektu, pełniącej rolę „ekranu” dla obrazu interferencyjnego, powoduje, że intensywność światła powracającego do umieszczonego w urządzeniu detektora, jest modulowana z częstotliwością proporcjonalną do prędkości przesuwu. W ten sposób można z dużą dokładnością, całkowicie bezkontaktowo, mierzyć szybkość poruszania się rozmaitych obiektów, w tym folii, blach, rur, arkuszy papieru i innych materiałów, stosowanych m.in. w produkcji przemysłowej. Mało tego – scałkowanie prędkości po czasie pozwala także na… pomiar długości tychże materiałów, a to otwiera zupełnie nowe możliwości w zakresie automatyzacji produkcji czy też kontroli jakości.

Podsumowanie
W artykule zaprezentowaliśmy szerokie spektrum zagadnień technologicznych, związanych z rozmaitymi metodami pomiaru odległości i prędkości obiektów. Jak widać, nawet pomimo pozornie zbliżonych podstaw konstrukcyjnych poszczególnych urządzeń, wykorzystywane w nich zjawiska fizyczne są diametralnie różne, choć w niektórych przypadkach – np. w radarach typu pulse-Doppler – można zetknąć się z przemyślanym połączeniem dwóch odmiennych metod pomiarowych w ramach tego samego systemu. Światło, fale ultradźwiękowe oraz mikrofale dają niebywałą elastyczność w zakresie bezdotykowych pomiarów ruchu i odległości, sukcesywnie przekraczając kolejne granice technologiczne i podbijając nowe obszary aplikacyjne.
Oprócz opisanych technik istnieje także wiele innych – dość powiedzieć chociażby o odometrii, technologiach geolokalizacyjnych, czy też sensorach inercyjnych. Umyślnie pominęliśmy również szeroki wachlarz rozwiązań przeznaczonych do pomiaru prędkości obrotowej – ich zróżnicowanie sprawia, że tematyka ta znacząco wykracza poza ramy niniejszego opracowania.
inż. Przemysław Musz, EP










