Zaloguj
Zaloguj



Moduł KAmodL3GD20 – konfigurowanie jądra Linux i obsługa programowa
Wykorzystany do praktycznej realizacji projektu procesor i.MX6 ULL z rdzeniem Cortex-A7, został wyposażony w cztery sprzętowe kontrolery magistrali I2C. Konfigurację jądra systemu Linux rozpoczynamy więc od wywołania narzędzia menuconfig, a następnie włączenia sterowników dla sprzętowego kontrolera magistrali:
Device Drivers --->
[*] I2C support --->
[*] I2C Hardware Bus Support --->
<*> IMX I2C interface
< > GPIO-based bitbanging I2C
Do komunikacji z układem L3GD20 wykorzystany zostanie interfejs i2c-dev, który umożliwia uzyskanie dostępu do magistrali z poziomu przestrzeni użytkownika poprzez pliki specjalne urządzeń /dev/i2c-x (gdzie wartość x oznacza kolejny numer porządkowy interfejsu I2C). Interfejs ten, poprzez wygodne API, umożliwia przygotowanie obsługi urządzenia peryferyjnego bezpośrednio w przestrzeni użytkownika – z pominięciem sterowników w jądrze systemu. Rozwiązanie to jest praktyczne na etapie wczesnego projektowania obsługi sprzętu (brak potrzeby rekompilacji jądra lub modułu) lub w sytuacji gdy sterownik wybranego urządzenia peryferyjnego nie został zaimplementowany w systemie. Włączenie interfejsu i2c-dev w jądrze systemu:
Device Drivers --->
[*] I2C support --->
<*> I2C device interface
Po zakończonym procesie konfiguracji jądra, niezbędna jest również edycja opisu Device Tree w którym to aktywujemy wybrany kontroler I2C – poprzez edycję pola status – oraz dokonamy konfiguracji funkcji alternatywnych dla wybranych wyprowadzeń procesora.
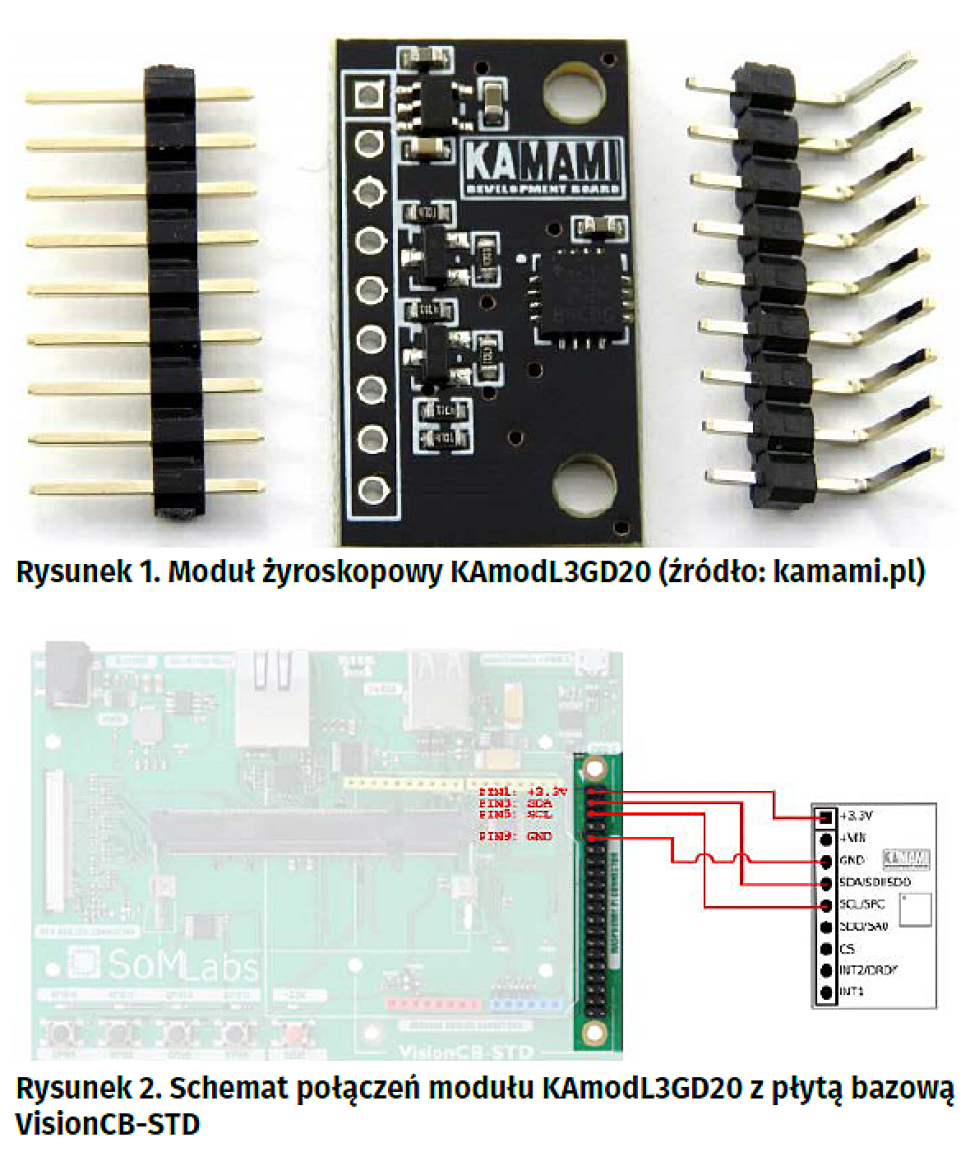
W prezentowanym projekcie wybrano wyprowadzenia numer 3 i 5 gniazda J504 (umiejscowionego na płycie bazowej VisionCB-STD dla modułów VisionSOM), które mogą pełnić alternatywną funkcję linii SDA i SCL dla kontrolera I2C2 (domyślnie linie te są sygnałami TX oraz RX kontrolera UART5). Pełny schemat połączeń przedstawiono na rysunku 2.
Bazując na schemacie połączeń z rysunku 2, dokonajmy edycji opisu Device Tree, w którym to aktywujemy kontroler magistrali I2C2:
&i2c2 {
clock_frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c2>;
status = "okay";
};
oraz wyprowadzeniom MX6UL_PAD_UART5_TX_DATA i MX6UL_PAD_UART5_RX_DATA, przypiszemy alternatywne funkcje linii SCL oraz SDA:
&iomuxc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_hog_1>;
imx6ul-evk {
pinctrl_i2c2: i2c2grp {
fsl,pins = <
MX6UL_PAD_UART5_TX_DATA__I2C2_SCL 0x4001b8b0
MX6UL_PAD_UART5_RX_DATA__I2C2_SDA 0x4001b8b0
>;
};
};
};
Po zakończonej konfiguracji jądra oraz edycji plików Device Tree, można przystąpić do kompilacji i zaktualizowania obrazu systemu.
Po ponownym uruchomieniu komputera, poprawność konfiguracji i kompilacji jądra systemu możemy sprawdzić poprzez wyświetlenie listy dostępnych kontrolerów I2C w katalogu /dev:
root@somlabs:~# ls -l /dev/ | grep i2c
crw-rw---- 1 root i2c 89, 1 May 25 18:36 i2c-1
Różnica w numeracji kontrolerów (w pliku Device Tree aktywowano kontroler I2C2, natomiast w katalogu /dev odnajdujemy kontroler i2c-1) wynika z różnic indeksowania – jądro systemu stosuje numerację zaczynającą się od wartości 0. Poprawnie skonfigurowany system pozwala na przejście do kolejnego etapu – weryfikacji połączeń sprzętowych. Jedną z najszybszych metod na nawiązanie komunikacji z podłączonym do magistrali sprzętem jest wykorzystanie pakietu i2c-tools w skład którego wchodzą między innymi takie narzędzia jak i2cdetect, i2cset oraz i2cget. Instalacja pakietu i2c-tools w dystrybucji Debian, odbywa się w sposób standardowy dla narzędzia apt-get:
root@somlabs:~# apt-get install i2c-tools
Reading package lists... Done
Building dependency tree
Reading state information... Done
Suggested packages:
libi2c-dev python-smbus
The following NEW packages will be installed:
i2c-tools
0 upgraded, 1 newly installed, 0 to remove and 39 not upgraded.
Need to get 0 B/57.6 kB of archives.
After this operation, 196 kB of additional disk space will be used.
Program i2cdetect umożliwia przeskanowanie wybranej magistrali I2C, wskazanej poprzez parametr -y. Wynikiem działania polecenia jest tablica adresów wraz z listą dostępnych na magistrali urządzeń:
root@somlabs:~# i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- UU -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- 6b -- -- -- --
70: -- -- -- -- -- -- -- --
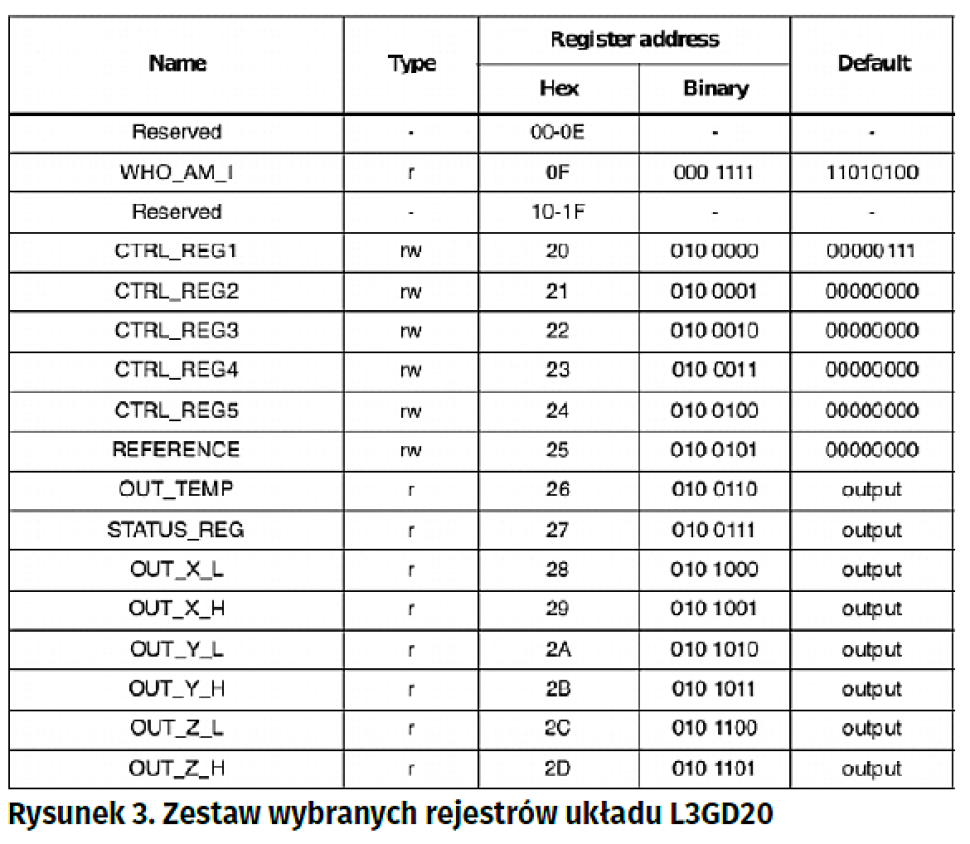
Polecenie i2cget pozwala na odczyt danych z wybranego układu podrzędnego i określonego rejestru. Pierwszym parametrem polecenia jest numer porządkowy magistrali, następnie adres układu podrzędnego, numer rejestru spod którego będziemy wykonywać odczyt oraz rozmiar odczytywanej danej (domyślnie jeden bajt). Odczyt zawartości rejestru 0x0F (WHO_AM_I) z układu o adresie 0x6B podłączonego do magistrali i2c_1, może zostać realizowany następująco:
root@somlabs:~# i2cget -y 1 0x6b 0x0F
0xd4
Odczytana wartość 0xD4 jest zgodna z wartością ustaloną przez producenta, tak więc komunikacja z układem L3GD20 przebiega prawidłowo – możemy przystąpić do implementacji obsługi żyroskopu na potrzeby programu i2c-gyro.
Przedstawiona na Listingu 2 funkcja gyro_init() realizuje wyłącznie prostą operację zapisu za pomocą wywołania write(). W przypadku funkcji realizujących odczyt danych z wybranych rejestrów (np. rejestru statusu lub rejestrów przechowujących dane pomiarowe) nie możemy wykorzystać najprostszych wywołań systemowych read()/write(), ponieważ każde z tych wywołań generuje bit stopu. Układy peryferyjne I2C o „organizacji rejestrowej” wymagają złożonych sekwencji zapis/odczyt bez generowania bitu stopu pomiędzy tymi operacjami. Do tego celu należy wykorzystać wywołanie systemowe ioctl (fd, I2C_RDWR, struct i2c_rdwr_ioctl_data *msgset), które umożliwia wykonanie dowolnej transakcji na magistrali I2C w formie pojedynczej sekwencji. Ostatni argument powyższego wywołania stanowi wskaźnik do struktury i2c_rdwr_ioctl_data:
struct i2c_rdwr_ioctl_data
{
struct i2c_msg *msgs;
__u32 nmsgs;
};
Pole nmsgs określa liczbę transakcji w pojedynczej sekwencji, natomiast pole msgs zawiera wskaźnik do tablicy struktur opisujących poszczególne transakcje w postaci:
struct i2c_msg
{
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010
#define I2C_M_RD 0x0001
/* ... */
#define I2C_M_RECV_LEN 0x0400
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
Pole addr struktury i2c_msg opisuje sprzętowy adres układu peryferyjnego którego dotyczy dana transakcja. Pole flags umożliwia sterowanie daną transakcją poprzez zestaw dodatkowych flag, np. flaga I2C_M_RD informuje, że dana transakcja jest transakcją odczytu. Pole len określa długość bufora z danymi do wysłania/odebrania, natomiast pole *buf zawiera wskaźnik do bufora danych. Na bazie wywołania ioctl (fd, I2C_RDWR, struct i2c_rdwr_ioctl_data *msgset) utworzono funkcję gyro_get_xyz() odczytującą prędkości kątowe w osiach X, Y i Z (listing 3).
Analogicznie do funkcji gyro_get_xyz() utworzono również funkcję gyro_get_status(), której zadaniem jest odczyt rejestru statusu STATUS_REG i sprawdzanie bitu informującego o gotowości danych do odczytu. Ponieważ projekt wykorzystuje wyłącznie pomiary żyroskopowe (bez korelacji danych np. z pomiarami z akcelerometru) niezbędna jest również najprostsza kalibracja układu - funkcja gyro_calib() na podstawie 200. pomiarów wartości spoczynkowej określa przedziały wyznaczające brak ruchu żyroskopu. W głównej pętli programu, prędkość kątowa przeliczana jest na wartość kąta obrotu (drogę) na podstawie prostego całkowania – funkcja get_timestamp() określa wartości przedziałów czasowych dt pomiędzy kolejnymi iteracjami pętli. Choć tak zrealizowana metoda pomiarowa jest obarczona dość dużym błędem, jest ona wystarczająca do odwzorowania ruchu obiektu w postaci animowanej kostki 3D wyświetlanej w graficznym interfejsie użytkownika. Kompletny kod źródłowy programu gyro-i2c został przedstawiony na listingu 4.
Node.js – rozbudowa interfejsu o proste elementy grafiki 3D (Three.js)
Na obecnym etapie realizacji projektu przygotowane zostały już wszystkie elementy składowe. W poprzedniej części artykułu omówiono back-end w postaci serwera WWW ze skryptu main.js, którego zadaniem był odczyt danych z procesu potomnego gyro-i2c oraz przesłanie danych za pomocą socket.io do warstwy front-end – interfejsu graficznego w postaci strony index.html.
W ostatnim podrozdziale artykułu rozbudujemy interfejs graficzny aplikacji o prostą grafikę 3D w postaci sześciennej kostki, odwzorowującej ruch podłączonego modułu żyroskopu. Do realizacji operacji graficznych wykorzystamy bibliotekę Three.js, która to natomiast korzysta z API WebGL – oficjalnego rozszerzenia możliwości języka JavaScript o interfejs grafiki 3D.
Bezpośrednie wykorzystanie interfejsu WebGL jest dość uciążliwe, choćby ze względu na dużą liczbę operacji niskiego poziomu, jakie spoczywają na programiście – definicja wierzchołków, buforów, macierzy transformacji, operacje związane z wyświetlaniem sceny, obsługa shaderów, oświetlenia, modeli, kamer i wiele innych.
W bibliotece Three.js scena budowana jest z obiektów (sama scena jest również obiektem, w którym umieszczamy inne obiekty). Do podstawowych obiektów możemy zaliczyć: figury geometryczne (biblioteka posiada zdefiniowane kilka gotowych do użycia obiektów takich jak sfera czy sześcian), materiały przypisywane do figur geometrycznym (określające m.in. ich kolor i fizykę odbijania światła), źródła światła oraz obserwatora sceny (czyli „kamerę”, która obserwuje scenę w określonym położeniu).
Rozbudowę aplikacji rozpoczynamy od pobrania kodu biblioteki Three.js (plik three.min.js) do katalogu w którym umieszczono skrypt main.js oraz stronę index.html (pełny kod źródłowy skryptu main.js oraz strony index.html został przedstawiony na listingu 6 i listingu 9 w pierwszej części artykułu):
wget http://threejs.org/build/three.min.js
Edycję pliku index.html rozpoczynamy od zdefiniowania w sekcji <head> „płótna” canvas (o wymiarach 500x500px oraz identyfikatorze mycanvas) w którym będzie renderowana docelowa animacja:
<canvas id="mycanvas" width="500" height="500">
</canvas>
Następnie w sekcji <head> dołączamy bibliotekę Three.js:
<script src='three.min.js'></script>
W dalszej części skryptu definiujemy zmienne w których będziemy przechowywać wyniki pomiarów w osi x, y, z oraz informacje o tworzonej scenie i dołączonych do niej obiektach:
var camera, scene, renderer;
var geometry, material, mesh;
var x, y, z;
Następnie implementujemy funkcję init(), której zadaniem jest zbudowanie sceny z określonych obiektów – listing 5. W pierwszej linii kodu funkcji init() tworzymy scenę, do której będziemy dołączali kolejno definiowane obiekty (kamerę, figurę geometryczną oraz materiał dla tej figury):
scene = new THREE.Scene();
W następnym kroku tworzymy obiekt kamery określając kąt jej widzenia (70 stopni), proporcje kadru, zakresy widzenia: bliski i daleki, a także jej umiejscowienie:
camera = new THREE.PerspectiveCamera (70, 500/500, 0.01, 10);
camera.position.z = 0.5;
Korzystając ze zdefiniowanych w bibliotece Three.js kształtów, tworzymy obiekt reprezentujący sześcian (BoxGeometry):
geometry = new THREE.BoxGeometry (0.2, 0.2, 0.2);
oraz obiekt stanowiący „materiał” z jakiego wykony jest nasz sześcian (decyduje on m.in. o kolorze obiektu i sposobie rozpraszania światła) – wykorzystamy tutaj predefiniowany materiał MeshNormalMaterial:
material = new THREE.MeshNormalMaterial();
Z połączenia figury z materiałem możemy utworzyć obiekt klasy Mesh, który dodajemy do tworzonej sceny:
mesh = new THREE.Mesh (geometry, material);
scene.add (mesh);
W ostatnich liniach funkcji init(), określamy rozmiar i identyfikator powierzchni (mycanvas), na której będzie renderowana animacja:
renderer = new THREE.WebGLRenderer ({ canvas: mycanvas});
renderer.setSize (500, 500);
document.body.appendChild (renderer.domElement);
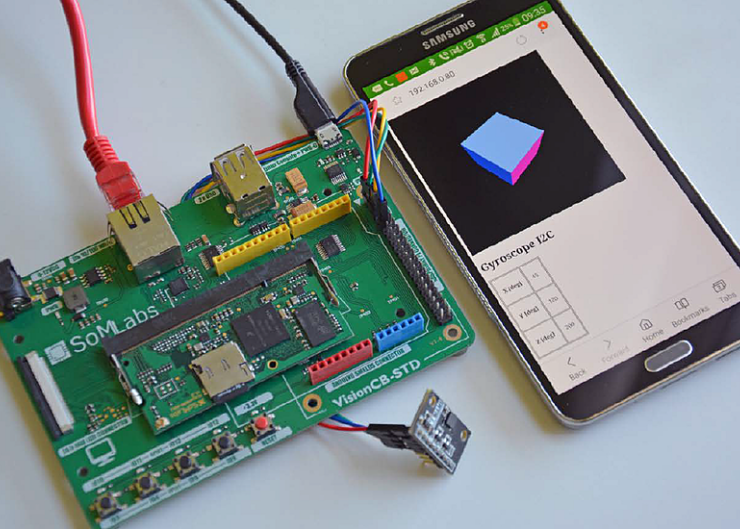
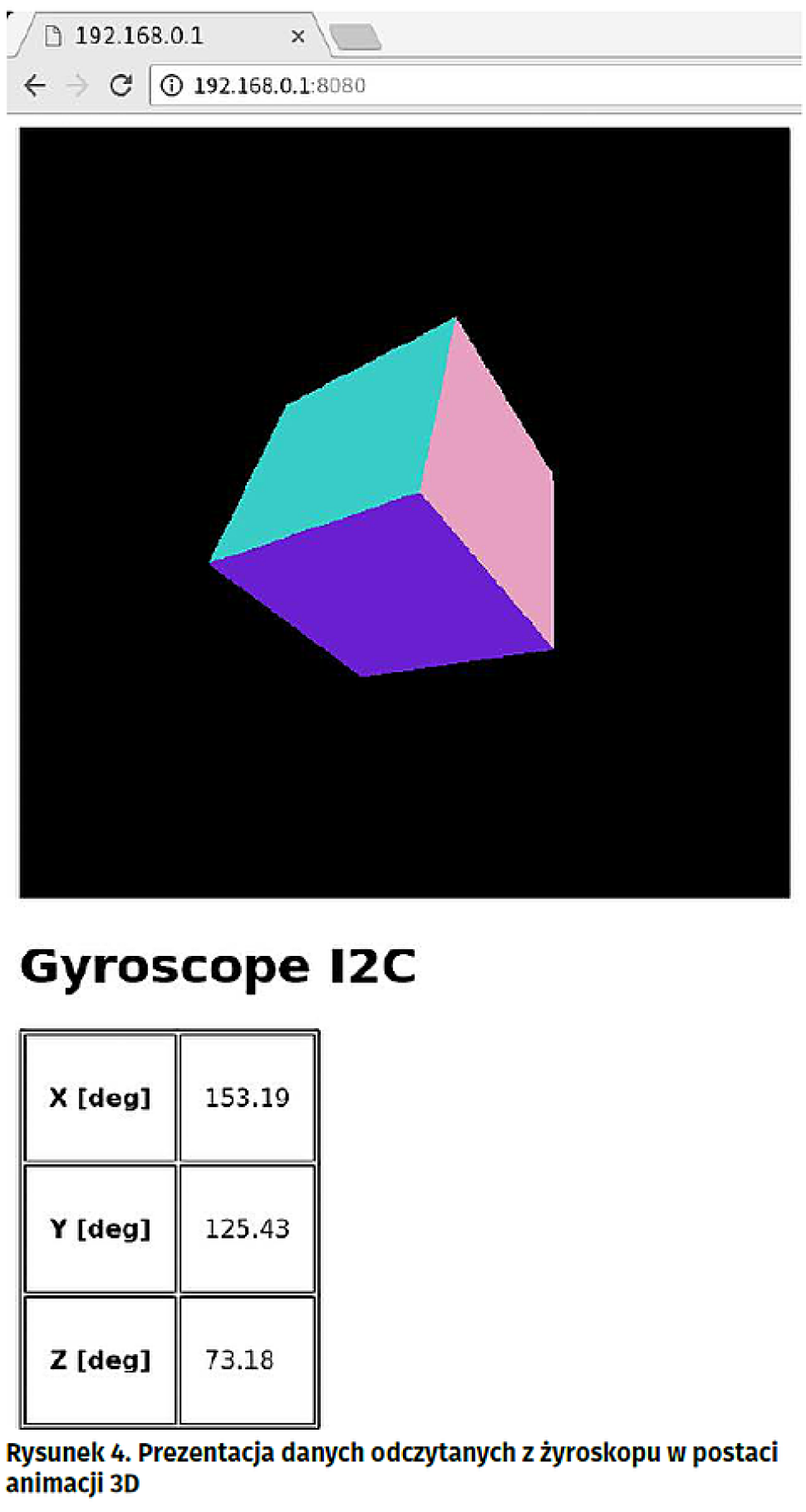
Na listingu 6 przedstawiono kod funkcji animate(), której zadaniem jest wykonanie obrotu obiektu, zgodnie z kątem obrotu zapisanym w zmiennych x, y, z. Pełna zawartość pliku index.html (wraz z wyróżnieniem zmian wprowadzonych w stosunku do poprzedniej części artykułu) została przedstawiona na listingu 7. Niewielkiej modyfikacji wymaga również sam kod serwera main.js. Dotychczas serwer na żądnie klienta udostępniał wyłącznie plik index.html. W aktualnie formie, przy ładowaniu strony głównej, klient zażąda również pliku three.min.js – serwer powinien to żądanie obsłużyć i dostarczyć klientowi wymaganą bibliotekę (listing 8). Po skopiowaniu do katalogu /tmp skompilowanej wersji kodu gyro-i2c z listingu 4 oraz ponownym skryptu main.js, uruchomiony na komputerze jednopłytkowym serwer WWW prezentuje dane pomiarowe w postaci animowanej kostki 3D, jak przedstawiono to na rysunku 4.
Łukasz Skalski
contact@lukasz-skalski.com
Literatura:
http://bit.ly/2LPYzUS