Zaloguj
Zaloguj




W niniejszym artykule, na przykładzie komputera VisionSOM (z procesorem NXP i.MX6 ULL Cortex-A7) firmy SoMLabs [1], wyposażonego w dedykowany moduł wyświetlacza LCD-TFT, uruchomimy emulator konsoli Famicon/NES [2] (w Polsce znanej głównie dzięki klonowi oryginalnego projektu – konsoli Pegasus). Aby zwiększyć walor dydaktyczny projektu oraz by pod kątem „grywalności” jak najbardziej zbliżyć się do wspomnień z minionych lat, sterowanie za pomocą tradycyjnej klawiatury zastąpimy przyłączeniem i konfiguracją kontrolera konsoli Playstation 3/4 oraz prototypem własnego 8-przyciskowego gamepada, co pozwoli również na zapoznanie się z konfiguracją magistrali SPI oraz wyprowadzeń GPIO w systemie Linux. Zaczynajmy więc!
Przygotowanie karty z systemem Debian
Do budowy emulatora konsoli Famicon/NES wykorzystamy moduł komputera VisionSOM wyposażony w gniazdo karty pamięci SD, więc projekt rozpoczynamy od przygotowania karty z systemem operacyjnym Linux. Producent komputera – firma SoMLabs na stronach Wiki swojego produktu [3] dostarcza użytkownikowi wsparcie w postaci gotowych obrazów z dystrybucją Debian oraz opisem budowy obrazów z wykorzystaniem takich narzędzi jak Buildroot oraz Yocto. Przy wstępnym wyborze odpowiedniej dystrybucji lub narzędzi do budowy obrazu pomocne jest jasne określenie celu projektu. Jeżeli finalnym celem projektu jest zbudowanie jak najwierniejszej kopii samej konsoli (z minimalnym obrazem systemu, wyposażonym wyłącznie w niezbędne oprogramowanie umożliwiające uruchomienie emulatora bezpośrednio po starcie urządzenia), wówczas zalecaną opcją jest wykorzystanie narzędzia Buildroot. Jeśli natomiast chcemy osiągnąć docelowy efekt jak najmniejszym nakładem pracy, a sam komputer jednopłytkowy ma pełnić również inne funkcje (np. korzystamy z pełnego środowiska graficznego, a emulacja konsoli NES jest wyłącznie dodatkową opcją), warto skorzystać z gotowych pakietów środowiska Debian – pozwoli to uniknąć m.in. samodzielnej kompilacji oprogramowania emulatora. W niniejszym artykule wykorzystano drogę na skróty i użyto gotowych obrazów z dystrybucją Debian (autor na własnym przykładzie przekonał się, że wybór drugiej ścieżki jest bardziej optymalny – zaoszczędzony czas można wówczas poświęcić na testowanie projektu i radosny powrót do czasów dzieciństwa).
Przygotowanie karty SD rozpoczynamy od pobrania obrazu systemu. W środowisku Linux operację tę możemy zrealizować poleceniem:
wget http://somlabs.com/os_images/debian-stretch-visionsosm-6ull.img.xz
Po pobraniu pliku rozpakujmy jego zawartość za pomocą narzędzia unxz:
unxz debian-stretch-visionsom-6ull.img.xz
Przed przystąpieniem do dalszych prac warto również sprawdzić integralność pobranych danych poprzez obliczenie sumy kontrolnej SHA256 i porównanie jej z informacjami udostępnianymi na stronie producenta: sha256sum debian-stretch-visionsom-6ull.img
Po pobraniu oraz rozpakowaniu pliku możemy przystąpić do wgrania obrazu systemu na kartę micro-SD. Jedną najprostszych metod zapisania obrazu z pliku jest wykorzystanie linuksowego narzędzia dd. Ogólna składnia polecenia dd może może zostać zapisana następująco:
dd if=<pliku_wejściowy> of=<plik_wyjściowy> <dodatkowe opcje>
Plik wejściowy polecenia (if – Input File) będzie stanowił pobrany w uprzednim kroku obraz systemu debian-stretch-visionsom-6ull.img. Plik wyjściowy (of – Output File) to umieszczona w czytniku i podłączona do komputera karta SD, która jest reprezentowana w systemie jako plik specjalny w katalogu /dev. W celu zweryfikowania, który wpis jest odpowiedzialny za podłączone urządzenie, korzystając z terminalu systemowego, możemy wydać polecenie dmesg, które wyświetli komunikaty wypisywane w buforze komunikatów jądra, w tym informacje o ostatnio przyłączonych urządzeniach, np:
[21870.506727] sdb: sdb1 sdb2
[21870.509486] sd 1:0:0:0: [sdb] Attached SCSI removable disk
W powyższym przypadku wpis /dev/sdb odnosi się do całej karty SD, natomiast wpisy /dev/sdb1, /dev/sdb2, dev/sdbX, do kolejnych partycji urządzenia – o ile zostały one uprzednio utworzone. W przypadku wykorzystania czytnika kart wbudowanego w komputer PC sterownik urządzenia może zarejestrować kartę SD w postaci pliku o nazwie /dev/mmcblk0.
Polecenia dd używamy, korzystając z praw administratora, tak więc należy się bezwzględnie upewnić, że wprowadzono poprawną wartość dla pliku wyjściowego. Błędnie określenie wyjścia może spowodować nadpisanie danych na głównym dysku użytkownika – z powodu częstych pomyłek akronim narzędzia dd jest często rozwijany do „destroy disk” lub „delete data”. Poprawne określenie pliku wyjściowego reprezentującego podłączoną do czytnika kartę SD pozwala na ostateczne określenie formy polecenia dd:
sudo dd if=./debian-stretch-visionsom-6ull.img of=/dev/sdX bs=4M oflag=dsync
Powyższe polecenie skopiuje obraz debian-stretch-visionsom-6ull.img na wskazaną kartę SD. Dodatkowe parametry polecenia dd określają zapis w blokach po 4 MB (bs – Block Size) w sposób synchroniczny (bez buforowania). Ponieważ polecenie dd nie umożliwia nam monitorowania postępu zapisu danych na kartę SD, co w zależności od wielkości obrazu systemu może być dość czasochłonne, wygodnym rozwiązaniem jest wykorzystanie narzędzia pv, które wyświetla informacje o postępie odczytu danych z pliku. Przykładowa składnia polecenia z wykorzystaniem narzędzia pv wygląda następująco:
pv debian-stretch-visionsom-6ull.img | dd of=/dev/sdX bs=4M ofag=dsync
Po wgraniu obrazu na kartę, do konsoli systemu możemy zalogować się, wykorzystując wbudowany w płytę bazową VisionCB-STD konwerter UART-USB oraz dowolny program emulatora terminalu:
picocom -b 115200 /dev/ttyUSBX
Po otwarciu połączenia należy zalogować się na konto użytkownika root (bez hasła):
Debian GNU/Linux 9 localhost.localdomain ttymxc0
localhost login: root
root@localhost:~#
Środowisko kompilacji jądra Linux oraz Device Tree
Wraz z obrazem systemu Debian, firma SoMLabs dostarcza użytkownikowi wygodne środowisko konfiguracji i kompilacji jądra systemu oraz plików Device Tree. Środowisko to zostało zbudowane w oparciu o narzędzia Qemu oraz chroot [4], co pozwala na uruchomienie na komputerze PC (np. x86), nienatywnych plików wykonywalnych (np. dla architektury ARM) w standardowy dla plików natywnych sposób, tj. ./program. Do poprawnego działania środowiska w dystrybucji Ubuntu niezbędna jest uprzednia instalacja pakietów qemu, binfmt-support oraz qemu-user-static:
apt-get install qemu binfmt-support qemu-user-static
Pobranie, rozpakowanie i uruchomienie (w tym wykonanie operacji chroot zmieniającej katalog główny) kompletnego środowiska:
wget http://somlabs.com/os_images/somlabs-visionsom-6ull-debian-rootfs-qemu.tar.xz
sudo tar xf somlabs-visionsom-6ull-debian-rootfs-qemu.tar.xz
sudo ./somlabs-debian/chtoolchain
Po uruchomieniu skryptu chtoolchain, źródła systemu Linux są dostępne w katalogu /home/developer/source/kernel/linux-rel_imx_4.1.15_2.1.0_ga. Dla uproszczenia dalszego opisu przejdźmy do katalogu z kodem źródłowym:
cd /home/developer/source/kernel/linux-rel_imx_4.1.15_2.1.0_ga
W kolejnym kroku, do katalogu arch/arm/configs należy skopiować domyślną konfigurację jądra (plik visionsom-6ull-linux_defconfig), udostępnioną przez producenta płytki VisionSOM:
cp ../../somlabs-dts-1.0/visionsom-6ull-linux_defconfig arch/arm/configs/
wget http://wiki.somlabs.com/images/c/cd/Enable-tft-lcd.zip
unzip Enable-tft-lcd.zip
patch arch/arm/boot/dts/somlabs-visionsom-6ull.dts ./enable-tft-lcd.patch
W tak przygotowanym środowisku konfiguracja i kompilacja jądra oraz opisu Device Tree może zostać zrealizowana za pomocą następujących poleceń:
make ARCH=arm visionsom-6ull-linux_defconfig
make ARCH=arm menuconfig
make -j4 ARCH=arm zImage
make ARCH=arm somlabs-visionsom-6ull.dtb
Pliki wynikowe powyższych kompilacji, tj.:
arch/arm/boot/zImage,
arch/arm/boot/dts/somlabs-visionsom-6ull.dtb,
powinny zostać skopiowane do katalogu /boot na karcie SD z obrazem systemu.
Instalowanie środowiska Xfce oraz emulatora Fceux
W konfiguracji domyślnej dostarczony przez producenta modułu obraz z dystrybucją Debian, nie ma zainstalowanego środowiska graficznego. Dzięki wykorzystaniu wbudowanego w system menedżera pakietów instalacja wybranego środowiska ogranicza się do dwóch prostych poleceń w konsoli systemu (w odróżnieniu od np. Buildroota, gdzie wymagana byłaby rekonfiguracja i ponowne przebudowanie obrazu systemu). Instalowanie „lekkiego” środowiska graficznego Xfce [5]:
root@somlabs:~# apt-get update
root@somlabs:~# apt-get install xfce4
Również z wykorzystaniem narzędzia apt-get zainstalujmy w systemie jeden z dostępnych emulatorów konsoli NES – oprogramowanie Fceux [6] (nie jest to oczywiście jedyny dostępny w repozytoriach dystrybucji Ubuntu, emulator konsoli Famicon/NES):
root@somlabs:~# apt-get install fceux
Po zakończonym etapie instalacji pakietu w sekcji Games środowiska Xfce zostanie dodany nowy wpis, pozwalający na uruchomienie emulatora bezpośrednio z interfejsu graficznego – rysunek 2.
Po uruchomieniu emulatora należy skonfigurować dołączoną klawiaturę, wybierając z górnej belki programu opcję Fceux Options Gamepad Config. Wczytanie gry jest realizowane poprzez wybranie opcji Fceux File Open ROM i wskazanie pliku *.rom. Ze względu na aspekty prawne (emulacja sprzętu jest w pełni legalna – wątpliwości prawne może budzić wykorzystywanie plików ROM, nawet jeśli jesteśmy w posiadaniu oryginalnego kartridża z grą) autor nie umieścił w tekście bezpośrednich odnośników do źródeł.
Konfigurowanie kontrolera Sony DualShock 3/4 w jądrze Linux
Czytelnicy którzy dobrze pamiętają czasy świetności konsoli NES, dość szybko zauważą, że wykorzystanie standardowej klawiatury komputerowej nie pozwala na pełne oddanie magii i grywalności tego systemu. Pośrednim rozwiązaniem problemu (w stosunku do zakupu i przystosowania oryginalnego kontrolera konsoli Famicon/NES) może być wykorzystanie kontrolera od innych, współczesnych konsol, np. Sony Playstation lub Xbox. Jądro systemu Linux zapewnia pełne wsparcie dla urządzeń Sony DualShock 3 (od jądra w wersji 3.15) oraz DualShock 4 (od jądra w wersji 3.15 dla pierwszej generacji kontrolera oraz od wersji 4.10 dla drugiej generacji). Wsparcie po stronie jądra systemu wyklucza zatem konieczność samodzielnej programowej implementacji obsługi kontrolera, a całość konfiguracji ogranicza się do włączenia odpowiednich opcji jądra z wykorzystaniem polecenia: make arch=ARM menuconfig:
Device Drivers --->
Input device support --->
<*> Joystick interface
<*> Event interface
HID support --->
[*] Battery level reporting for HID devices
[*] /dev/hidraw raw HID device support
<*> Generic HID driver
Special HID drivers --->
<*> Sony PS2/3/4 accessories
[*] Sony PS2/3/4 accessories force feedback support
USB HID support --->
<*> USB HID transport layer
[*] LED Support --->
<*> LED Class Support
Device Drivers --->
Input device support --->
<*> Event debugging
Po ponownej kompilacji jądra systemu poleceniem make zImage, aktualizacji plików na karcie SD (obrazu jądra w katalogu /boot) i podłączeniu kontrolera DualShock do portu USB, w buforze komunikatów jądra zostaną wyświetlone informacje o poprawnym wykryciu urządzenia:
root@somlabs:~# dmesg
<...>
usb 1-1: new full-speed USB device number 2 using ci_hdrc
input: Sony PLAYSTATION(R)3 Controller as /devices/platform/soc/2100000.aips-bus/2184000.usb/ci_hdrc.0/usb1/1-1/1-1:1.0/0003:054C:0268.0004/input/input5
sony 0003:054C:0268.0004: input,hidraw3: USB HID v1.11 Joystick [Sony PLAYSTATION(R)3 Controller] on usb-ci_hdrc.0-1/input0
W lokalizacji /dev/input zostanie również utworzony wpis jsX, reprezentujący podłączony do systemu kontroler:
root@somlabs:~# ls -l /dev/input/
total 0
drwxr-xr-x 2 root root 160 Feb 23 10:24 by-id
drwxr-xr-x 2 root root 200 Feb 23 10:24 by-path
crw-rw---- 1 root input 13, 64 Feb 23 10:24 event0
crw-rw---- 1 root input 13, 65 Feb 23 10:24 event1
crw-rw-r-- 1 root input 13, 0 Feb 23 10:24 js0
crw-rw---- 1 root input 13, 63 Feb 23 10:24 mice
crw-rw---- 1 root input 13, 32 Feb 23 10:24 mouse0
W wypadku połączenia USB należy upewnić się, że układ zasilania komputera jednopłytkowego jest w stanie dostarczyć do podłączonego urządzenia odpowiedni zapas mocy (w przypadku modułów VisionSOM podłączonych do płyty bazowej VisionCB-STD zaleca się wykorzystanie odpowiedniego zasilacza – wykorzystanie złącza z oznaczeniem „Linux Console + PWR-C” może okazać się niewystarczające). Alternatywną możliwością zestawienia połączenia pomiędzy kontrolerem a komputerem jednopłytkowym jest wykorzystanie łączności Bluetooth oraz stosu BlueZ.
Po poprawnym wykryciu podłączonego kontrolera DualShock, można przystąpić do konfiguracji klawiszy w sposób analogiczny do przypadku standardowej klawiatury: Fceux Options Gamepad Config. Warto również wspomnieć, że sterownik kontrolera udostępnia również w przestrzeni użytkownika dodatkowe informacje o stanie naładowania baterii. Prostszą z opcji sprawdzenia stanu naładowanie kontrolera jest wykorzystanie interfejsu sysfs:
root@somlabs:~# cd /sys/class/power_supply/
root@somlabs:/sys/class/power_supply# ls -l
total 0
lrwxrwxrwx 1 root root 0 Feb 23 12:04 sony_controller_battery_04:98:f3:95:a9:5a
root@somlabs:/sys/class/power_supply# cat sony_controller_battery_04:98:f3:95:a9:5a/capacity
100
Dla kontrolera DualShock 3 poziom naładowania jest raportowany w kroku 25% (100%, 75%, 50%, 25% co odpowiada czterem poziomom naładowania wyświetlanych w interfejsie konsoli Playstation3), natomiast dla DualShock 4 wartość kroku pomiaru wynosi 10%. Alternatywną formą sprawdzenia stanu baterii jest wykorzystanie narzędzia upower, wówczas w pierwszej kolejności należy wyświetlić listę urządzeń udostępniających statystki:
root@somlabs:~# upower -e
/org/freedesktop/UPower/devices/keyboard_sony_controller_battery_04o98of3o95oa9o5a
/org/freedesktop/UPower/devices/DisplayDevice
A następnie, określając ścieżkę urządzenia, wyświetlić jego aktualne statystyki:
root@somlabs:~# upower -i /org/freedesktop/UPower/devices/keyboard_sony_controller_battery_04o98of3o95oa9o5a
native-path: sony_controller_battery_04:98:f3:95:a9:5a
power supply: no
updated: Fri Feb 23 10:41:24 2018 (29 seconds ago)
has history: yes
has statistics: yes
keyboard
present: yes
rechargeable: yes
state: fully-charged
warning-level: none
percentage: 100%
icon-name: ‚battery-full-charged-symbolic’
Kontroler zbudowany z użyciem układu MCP23S08
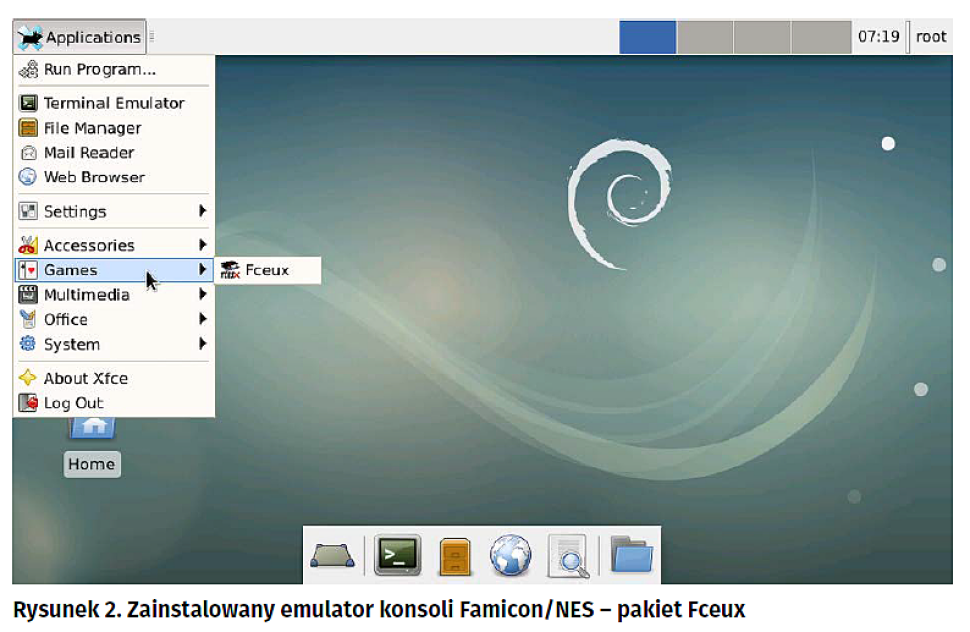
Jeżeli nie dysponujemy żadnym kontrolerem, wówczas idealnym rozwiązaniem (choćby ze względu na walor edukacyjny) jest konstrukcja własnego prostego urządzenia. Oryginalny kontroler konsoli NES ma 8 przycisków: cztery do kontroli kierunku, dwa przyciski akcji (oznaczone jako A i B) oraz przyciski START i SELECT. Aby uniknąć problemów z wyborem i konfiguracją multipleksacji wyprowadzeń GPIO (co nawet przy dużej liczbie wyprowadzeń I/O dostępnych na złączach komputerów jednopłytkowych nie zawsze jest proste), do sprzętowej budowy kontrolera wykorzystamy moduł KAmodEXP1 [7], będący adresowalnym ekspanderem GPIO z układem MCP23S08. Układ ten może pracować zarówno na magistrali SPI, jak i I2C, oraz ma dokładnie osiem konfigurowalnych linii GPIO, a więc idealnie wpisuje się w realizowany projekt. Schemat połączeń przedstawiono na rysunku 3 (układ MCP23S08 podłączony w konfiguracji SPI).
Dla uniknięcia implementacji programowej obsługi układu MCP23S08 w przestrzeni użytkownika, użyjemy gotowego sterownika dostępnego w jądrze systemu. Konfigurację jądra rozpoczynamy od włączenia sprzętowego kontrolera magistrali SPI dla układów i.MX:
Device Drivers --->
[*] SPI support --->
<*> Freescale i.MX SPI controllers
Następnie włączamy docelowy sterownik układu MCP23S08:
Device Drivers --->
-*- GPIO Support --->
SPI GPIO expanders --->
<*> Microchip MCP23xxx I/O expander
Włączenie sterownika układu MCP23S08 oraz przygotowanie dla niego opisu Device Tree (co przedstawiono poniżej) spowoduje pojawienie się w systemie nowego kontrolera GPIO, dostępnego w przestrzeni użytkownika poprzez interfejs /sys/class/gpio. Aby maksymalnie uprościć obsługę projektowanego urządzenia, linie kontrolera GPIO wykorzystamy w sterowniku klawiatury Polled GPIO buttons [więcej informacji – patrz ramka]:
Device Drivers --->
Input device support --->
<*> Event interface
[*] Keyboards --->
< > GPIO Buttons
<*> Polled GPIO buttons
Konfigurację jądra uzupełniamy opisem Device Tree wymaganym przez włączone powyżej sterowniki. Edycję pliku somlabs-visionsom-6ull.dts rozpoczynamy od dodania opisów dla kontrolera SPI oraz układu MCP23S08 (listing 1).

compatible = „microchip,mcp23s08” – dla wersji SPI z 8 liniami GPIO,
compatible = „microchip,mcp23s17” – dla wersji SPI z 16 liniami GPIO,
compatible = „microchip,mcp23008” – dla wersji I2C z 8 liniami GPIO,
compatible = „microchip,mcp23017” – dla wersji I2C z 16 liniami GPIO.
Wpisem gpio-controller oznaczamy urządzenie jako pełniące funkcję kontrolera GPIO. Pole microchip,spi-present-mask jest istotne wyłącznie wtedy, gdy jedna linia CS jest dzielona przez większą liczbę adresowalnych układów. Pole reg – do konfiguracji MCP23S08 jako układu SPI – określa numer porządkowy wyprowadzenia linii CS. Wpisem spi-max-frequency określamy maksymalną dopuszczalną częstotliwość zegarową interfejsu SPI (tutaj 10 MHz).
Tak przygotowany opis kontrolera SPI oraz układu MCP23S08 należy uzupełnić o opis konfiguracji multipleksowania wyprowadzeń I/O (listing 2). Wyprowadzenia, którym na listingu 2 przypisano role linii SCLK oraz CS, w domyślnym opisie Device Tree dostarczanym przez producenta płytki VisionSOM pełnią funkcję linii RX oraz TX kontrolera UART2. Aby uniknąć konfliktu, należy wyłączyć kontroler UART2 poprzez wykomentowanie linii statusu, jak przedstawiono to na listingu 3.
Ostatnim etapem przygotowania opisu Device Tree jest zdefiniowanie 8 przycisków w ramach sterownika gpio-keys-polled. Ponieważ sterownik pracuje w trybie odpytywania, niezbędne jest określenie interwału czasowego poprzez pole poll-interval (wartość wyrażona w milisekundach). Następnie dokonano opisu ośmiu przycisków, definiując ich etykiety (pole label), odwołania do kontrolera GPIO (do kolejnych linii I/O kontrolera gpiom1/układu MCP23S08) oraz przypisując im wybrane kody zdefiniowane przez podsystem wejścia. Fragment opisu Device Tree przedstawiono na listingu 4. Po skompilowaniu nowego obrazu jądra oraz opisu Device Tree z wykorzystaniem poleceń:
make ARCH=arm zImage
make ARCH=arm somlabs-visionsom-6ull.dtb
pliki wynikowe (tj. zImage oraz somlabs-visionsom-6ull.dtb) należy skopiować do katalog /boot na karcie SD. Po ponownym uruchomieniu systemu w buforze komunikatów jądra zostaną wyświetlone komunikaty informujące o poprawnej konfiguracji sterownika:
root@somlabs:~# dmesg | grep gpio-keys
input: gpio-keys as /devices/platform/gpio-keys/input/input0
Poprawność działania kontrolera oraz podłączonych przycisków może zostać przetestowana za pomocą narzędzia evtest:
root@somlabs:~# apt-get install evtest
root@somlabs:~# evtest --grab /dev/input/event0
Input driver version is 1.0.1
Input device ID: bus 0x19 vendor 0x1 product 0x1 version 0x100
Input device name: „gpio-keys”
Supported events:
Event type 0 (EV_SYN)
Event type 1 (EV_KEY)
Event code 103 (KEY_UP)
Event code 105 (KEY_LEFT)
…
Properties:
Testing ... (interrupt to exit)
Event: time 1519407395.872567, type 1 (EV_KEY), code 108 (KEY_DOWN), value 0
Event: time 1519407395.872567, -------------- SYN_REPORT ------------
Ostatecznej konfiguracji przycisków należy dokonać z wykorzystaniem opcji Gamepad Config w emulatorze Fceux (fotografia 4).
Łukasz Skalski
contact@lukasz-skalski.com
Bibliografia:
https://goo.gl/7JoUPg
https://goo.gl/DgRwoR
https://goo.gl/Y5WFjB
https://goo.gl/56DLir
https://goo.gl/ANvQL2
https://goo.gl/uuAKVF
https://goo.gl/hMFcCe