 Zaloguj
Zaloguj




Samodzielne karmienie zwierząt domowych to przyjemna czynność, którą lubi większość właścicieli zwierzaków. Niemniej bywa też tak, że właściciel musi opuścić mieszkanie na pewien czas i nie ma z kim zostawić swoich podopiecznych ani też kogo poprosić o ich karmienie.
Oczywiście, można po prostu spróbować nałożyć zwierzętom do misek kilka czy kilkanaście porcji na raz, ale nierzadko "znikną" one zbyt szybko, a przez pozostałe dni koty będą głodować. Problemem jest też sytuacja, gdy podanie zbyt dużej ilości pokarmu nie jest możliwe z innych względów - np. gdy nie ma wystarczającej ilości miejsca w klatce czy też, gdy zbytnio zmieni on swoje właściwości (choćby konsystencję), po tym, gdy trafi choćby do akwarium z wodą.
Zaawansowane możliwości
Skomputeryzowany dozownik nie tylko automatyzuje podawanie pokarmu, ale w wersji rozwiniętej może też wykonywać dodatkowe funkcje. Po pierwsze może modyfikować ilość udostępnianego jedzenia w zależności od sygnałów z czujników. Może też podawać różne jedzenie np. w oparciu o kalendarz, by utrzymywać zwierzęciu odpowiednią dietę.
Ponieważ Raspberry Pi jest wyposażone w interfejsy ethernetowe, komputerem można też ewentualnie sterować zdalnie przez Internet, samodzielnie - czy to na wakacjach, czy w delegacji - dobierając ilość pokarmu do odczytów z czujników. Przedstawiony projekt, wykonany przez Davida Bryana i opublikowany na jego blogu, nie realizuje jednak tak zaawansowanych funkcji, ale stanowi dobrą bazę do rozwoju.
Potrzebne podzespoły:
|
Potrzebne elementy i narzędzia
Podstawowym elementem projektu jest plastikowy dozownik do przekąsek i płatków śniadaniowych, jaki można spotkać np. w hotelach. Jego konkretny kształt nie jest istotny - ważne tylko, by miał obrotowe łopatki dozujące, do których podłączony zostanie serwomechanizm.
W zależności od fizycznego ustawienia dozownika, przydatne mogą okazać się rurki prowadzące pokarm do misek. Można w tym celu użyć tanich rur PCV, dostępnych w dowolnym sklepie z wyposażeniem domu i ogrodu. Autor projektu połączył całość za pomocą taśmy montażowej i plastikowych opasek zaciskowych (niekiedy nazywanych w Polsce "trytytkami") oraz skorzystał z rurek termokurczliwych do izolacji elementów elektronicznych.
Opcjonalnym wyposażeniem będzie buzzer i diody LED, sygnalizujące podanie pokarmu, by przywołać zwierzęta. Można też zainstalować przyciski, którymi właściciel będzie mógł ręcznie sterować dozownikiem, bez potrzeby korzystania z interfejsu sieciowego.
Naturalnie konieczny będzie też sam komputer - w tym przypadku Raspberry Pi, a ponadto by uniknąć potrzeby prowadzenia przewodu sieciowego, autor dokupił kartę sieciową Wi-Fi na USB. Nie obyło się też bez kilku dodatkowych elementów elektronicznych: płytki drukowanej ułatwiającej łączenie elementów z Raspberry Pi, goldpinów, przewodów, rezystorów i zasilacza.
Łączny koszt podzespołów wyniósł niemal 150 dolarów, z czego najdroższy był sam podwójny dyspenser przekąsek, a w drugiej kolejności był to Raspberry Pi oraz dwa serwomechanizmy. Autor zastosował też dosyć drogie przełączniki z dodatkowymi diodami LED i zapłacił 8,5 dolara za przewody, co podniosło łączna kwotę.
Narzędzia potrzebne do wykonania projektu to przede wszystkim lutownica i miniwiertarka. Przydatny będzie też pistolet klejowy oraz oczywiście szczypce i obcążki do przecinania przewodów. Autor używał dwóch wierteł o średnicach 0,5" i 1".
Montaż
Fotografia 1. Serwomechanizmy zastosowany w projekcie
Wykonanie projektu wymaga nieco pracy ręcznej i wprawy w posługiwaniu się narzędziami, ale szczegóły techniczne zależą od wybranej konfiguracji i cech fizycznych nabytego dozownika. W praktyce najczęściej konieczne jest zdjęcie lub odcięcie uchwytów, za pomocą których obracane są łopatki dozownika. W pozostałych po nich, wystających elementach należy wykonać nacięcia (nawiercenia), tak by można je było połączyć z serwomechanizmami.
Ważne, by połączenie było jak najdokładniej wykonane - oś serwomechanizmu powinna pokrywać się z osią łopatek dozownika. Warto też, ale tylko dla likwidacji ewentualnych luzów przy jednoczesnym wprowadzeniu pewnej elastyczności połączenia, zastosować klej termiczny. Trzeba także sprawdzić, czy siła potrzebna do obrotu łopatek z załadowanym w dozowniku pokarmem nie jest zbyt duża i dobrać odpowiednie serwomechanizmy.
Autor użył serwomechanizmów FeeTech FS5103R (fotografia 1), zasilanych napięciem 5 V o momencie siły przekraczającym 0,3 Nm i wymiarach 37 mm×54 mm×20 mm. Przypuszczalnie trzeba w nich wyłamać ogranicznik obrotu osi, ponieważ serwomechanizmy będą napędzały łopatki śmigiełka dozownika, które musi obracać się dookoła. Plastikowe opaski zaciskowe mogą posłużyć do przytwierdzenia obudów serwomechanizmów do obudowy dozownika, a do ujść dozownika, za pomocą taśmy montażowej mocujemy rury prowadzące do misek.
Połączenia elektryczne ograniczamy do minimum. Serwomechanizmy zasilamy napięciem 5 V, czyli takim samym jak samo Raspberry Pi. Naturalnie przyłączamy je także do masy, a trzeci przewód dołączamy do wyprowadzeń GPIO Raspberry Pi.
W omawianym projekcie autor skorzystał z wyprowadzeń o numerach 18 i 23, korzystając z nomenklatury wyprowadzeń układu BCM2835, do której następnie odnosi się w programie. Podłączamy opcjonalne diody poprzez rezystory, buzzer (do masy i pinu #24) i przełączniki. Lista połączeń znalazła się w tabeli 1. Jeśli dobrze dobierzemy dozownik, całość elektroniki zmieści się w podstawce obudowy.
Potrzebne oprogramowanie

Tabela 1. Podłączenia wyprowadzeń GPIO w Raspberry PI
Do Raspberry Pi wkładamy kartę SD z zainstalowanym na niej systemem operacyjnym. System wgrywamy z obrazu z Internetu - np. Raspbian, który wymaga karty o pojemności przynajmniej 4 GB. Kod programu został przygotowany w języku Python, którego obsługa jest zaimplementowana w Raspbianie. NCPotrzebne są natomiast dodatkowe biblioteki Pythona, do których instalacji przydatny będzie menedżer pakietów PIP. Instalujemy więc pakiet python-pip, korzystając z narzędzia instalacyjnego apt:
sudo apt-get install python-pip
Następnie za pomocą menedżera PIP instalujemy dodatkowe potrzebne pakiety Pythona, umożliwiające sprawdzenie strefy czasowej i określenie chwili zachodu słońca, o której automat ma wydawać pokarm. W tym celu korzystamy z poleceń:
sudo pip install astral
sudo pip install pytz
W końcu doinstalowujemy program umożliwiający programom Pythona zaawansowane sterowanie wejściami i wyjściami GPIO, a w tym generowanie sygnału PWM: sudo apt-get install python-rpi.gpio
Właściwy kod programu
Kod programu piszemy w pliku tekstowym i zapisujemy na dysku tak, by mógł system mógł go uruchamiać jako plik wykonywalny. Jeśli chcemy wysyłać potwierdzenia dozowania pokarmu e-mailem, tworzymy dodatkowy plik z ustawieniami, który będziemy następnie ładować w głównym pliku programu. Aby program wykonywał się automatycznie po uruchomieniu systemu operacyjnego, dodajemy go np. do listy poleceń do uruchomienia, w pliku /etc/rc.local.
Kod rozpoczynamy on załadowania bibliotek:
import time
import smtplib
from email_settings import *
import datetime
from datetime import date, timedelta, datetime
import RPi.GPIO as GPIO
from astral import *
from pytz import timezone
Pierwsza pozwala na wykonywanie operacji związanych z czasem. Druga - na wysyłanie wiadomości e-mailem. Trzecia, to utworzony przez nas plik, zawierający ustawienia konta emailowego. Czwarta i piąta pozwalają na przetwarzanie zmiennych zawierających informacje o czasie. Szósta dotyczy wspomnianej wcześniej zaawansowanej obsługi GPIO. Przedostatnia pozwala sprawdzić informacje o zachodzie słońca, a ostatnia określić strefę czasową.
Po ustawieniu informacji o strefie czasowej, można przejść do definicji funkcji oraz przypisania wyprowadzeniom GPIO nazw. Autor stworzył krótką funkcję do przesyłania wiadomości emailowych, korzystając z wcześniej wczytanych ustawień i danych serwera pocztowego, z którego miał zamiar korzystać. Definicje zmiennych związanych z wyprowadzeniami GPIO wyglądają następująco:
Servo1Pin=18
Servo2Pin=23
BeeperPin=24
GPIO_ButtonL_LED_PIN=4
GPIO_ButtonL_PIN=17
GPIO_ButtonR_LED_PIN=27
GPIO_ButtonR_PIN=22
Przy czym trzeba zaznaczyć, że wyprowadzenia GPIO #4 i #27 służą do załączania podświetlania przycisków, które autor użył w swoim projekcie. Konieczne jest też zainicjowanie wyprowadzeń, a więc przypisanie im trybów pracy. Naturalnie piny buzzera i LEDów ustawiane są jako wyjścia, a piny przycisków, jako wejścia:
GPIO.setmode(GPIO.BCM)
GPIO.setup(BeeperPin, GPIO.OUT)
GPIO.setup(GPIO_ButtonL_LED_PIN, GPIO.OUT)
GPIO.setup(GPIO_ButtonL_PIN, GPIO.IN)
GPIO.setup(GPIO_ButtonR_LED_PIN, GPIO.OUT)
GPIO.setup(GPIO_ButtonR_PIN, GPIO.IN)
GPIO.setup(Servo1Pin, GPIO.OUT)
GPIO.setup(Servo2Pin, GPIO.OUT)
Wypada również na starcie programu określić stan początkowy wyjść, by niepotrzebnie nie zaświecać diod LED:
GPIO.output(BeeperPin, False)
GPIO.output(GPIO_ButtonL_LED_PIN, False)
GPIO.output(GPIO_ButtonR_LED_PIN, False)
oraz poinformować użytkownika, że urządzenie jest gotowe do pracy, emitując sygnał buzzerem:
GPIO.output(BeeperPin, True)
time.sleep(.25)
GPIO.output(BeeperPin, False)
time.sleep(.25)
GPIO.output(BeeperPin, True)
time.sleep(.25)
GPIO.output(BeeperPin, False)
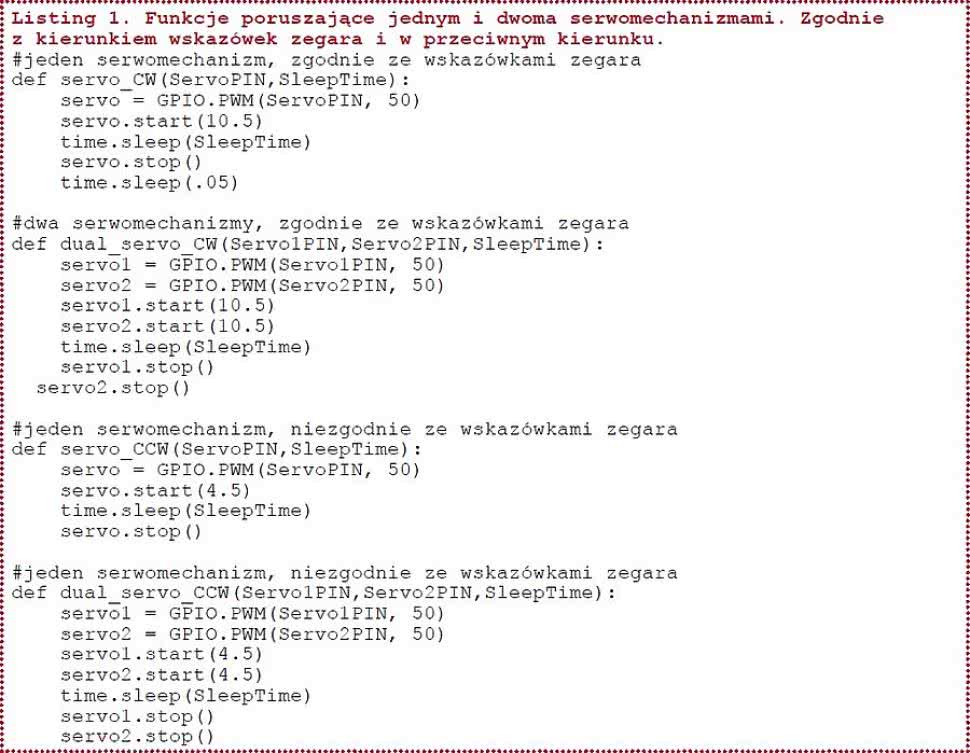
Listing 1. Funkcje poruszające jednym i dwoma serwomechanizmami. Zgodnie z kierunkiem wskazówek zegara i w przeciwnym kierunku.
Dobrym pomysłem jest stworzenie funkcji, które będą obracały serwomechanizmami przez określony czas. Ponieważ serwomechanizmy są sterowane sygnałem PWM, wyjścia oznaczone jako Servo1Pin i Servo2Pin należy w takiej funkcji odpowiednio skonfigurować, korzystając z polecenia GPIO.PWM(), któremu podajemy numer wyprowadzenia oraz częstotliwość sygnału PWM (wyrażoną w hercach).
W przypadku użytych serwomechanizmów, poruszenie ich do przodu wymaga zastosowania impulsu o długości około 2 ms, a do tyłu, ok. 1 ms. Uzyskujemy to poprzez wygenerowanie sygnału PWM o częstotliwości 50 Hz i wypełnieniu około (odpowiednio) około 10% i 5%. Autor projektu użył wypełnień 10,5% i 4,5%, które dawały najlepsze rezultaty.
Trzeba przy tym zaznaczyć, że potrzebne są oddzielne funkcje do uruchamiania jednego i dwóch serwomechanizmów jednocześnie. Wynika to faktu, że kod jest napisany synchronicznie, a w fragmencie poruszającym serwomechanizmami zastosowane jest opóźnienie, wstrzymujące działanie całego programu.
Jeśli oba serwomechanizmy mają być poruszane jednocześnie, opóźnienie to musi być wywołane w momencie, gdy oba sygnały PWM zaczęły być generowane. Kod tego fragmentu programu został umieszczony na listingu 1.
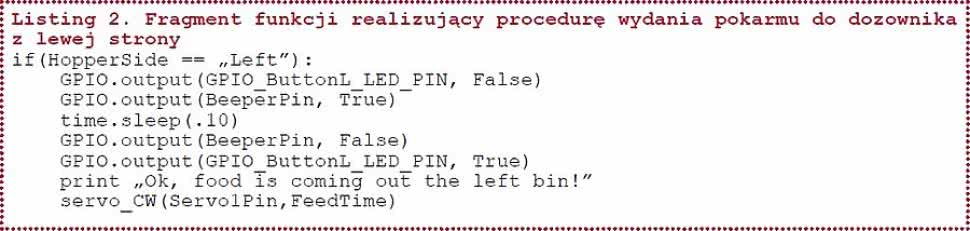
Listing 2. Fragment funkcji realizujący procedurę wydania pokarmu do dozownika z lewej strony
Ponieważ procedura karmienia obejmuje nie tylko samo uruchomienie serwomechanizmów, ale też włączenie buzzera i zapalenie diod, autor przygotował funkcję realizującą tę operację. Fragment odpowiadający za wydanie pokarmu tylko po lewej stronie został pokazany na listingu 2.
W końcu autor przygotował funkcje do karmienia konkretnego zwierzęcia, czy to po ręcznym naciśnięciu przycisku, czy ze względu na nadejście czasu karmienia. Warto też zwrócić uwagę na polecenie pobierające informację o zmierzchu dla danej lokalizacji, którego użyto w funkcji whenisdusk():
def whenisdusk():
dusk = location.dusk(local=True, date=None)
dusk2 = dusk.strftime("%Y-%m-%d %H:%M:%S")
return dusk2
Istotne jest też, że obsługa przycisków została zrealizowana poprzez wykrywanie zdarzeń na wejściach za pomocą funkcji
GPIO.add_event_detect():
GPIO.add_event_detect(GPIO_ButtonL_PIN, GPIO.RISING, callback=LeftFeedButton, bouncetime=500)
GPIO.add_event_detect(GPIO_ButtonR_PIN, GPIO.RISING, callback=RightFeedButton, bouncetime=500)

Listing 3. Główna pętla programu
Jej pierwszy parametr określa monitorowane wyprowadzenie, drugi rodzaj wykrywanego zdarzenia (zmiana sygnału z 0 na 1), trzeci precyzuje funkcję, która ma być wywołana w przypadku wystąpienia zdarzenia, a czwarty określa czas opóźnienia po wystąpieniu zdarzenia, po którym to zmiana sygnału na wejściu będzie mogła ponownie uruchomić procedury obsługi.
W głównej pętli programu pobierany jest aktualny czas i sprawdzane jest, czy nie jest to akurat chwila zmierzchu. Jeśli tak, wydawane jest polecenie nakarmienia zwierząt oraz wysłania emaila z informacją o wykonanej operacji.,
Ponadto program w pętli głównej sprawdza, czy jest akurat godzina 3:01 i jeśli jest to prawda, to aktualizuje informację o godzinie zmierzchu dla danego dnia. Pętla jest wykonywana w nieskończoność, przy czym każde kolejne wykonanie opóźniane jest o jedną sekundę. Kod głównej pętli pokazano na listingu 3.
Podsumowanie i ocenia projektu

Fotografia 2. Gotowy, zautomatyzowany, podwójny dozownik
Zaprezentowany projekt jest dobrym przykładem tego, jak za pomocą Raspberry Pi można zautomatyzować pewne operacje, wykonywane z użyciem serwomechanizmów. Prosta instalacja oraz niezbyt skomplikowany kod programu nie wymagają dużych nakładów pracy, by uzyskać całkiem zadowalający efekt.
Program można by było rozbudować o funkcję zdalnego sterowania, gdyż w obecnej wersji interfejs sieciowy jest wykorzystywany tylko i wyłączenie do sprawdzania czasu zmierzchu i wysyłania emaili z powiadomieniami (oraz do automatycznej aktualizacji czasu w trakcie pracy i do pobierania pakietów oprogramowania po instalacji systemu).
Autor dobrze wykorzystał zdarzenia do monitorowania stanu wejść, do których podłączono przyciski, ale cały projekt jest nieodporny na problemy związane z brakiem determinizmu czasowego w Linuksie uruchamianym na Raspberry Pi.
Główną wadą programu jest prosty mechanizm sprawdzania, czy nadszedł odpowiedni moment karmienia. Urządzenie porównuje aktualny czas z zadanym momentem karmienia z dokładnością co do sekundy, a opóźnienie głównej pętli również trwa sekundę.
Biorąc pod uwagę dodatkowo fakt, że interpreter Pythona i sam system operacyjny mogą w zupełnie niespodziewanej chwili zacząć wykonywać jakieś dodatkowe operacje (np. czyszczenie nieużywanej pamięci czy sprawdzanie jakichś aktualizacji), istnieje ryzyko, że danego pętla główna przeskoczy chwilę karmienia i uruchomi się np. sekundę przed i sekundę po zadanym momencie.
Sprawi to, że tego dnia komputer nie wykryje, że nastąpił czas karmienia i je pominie, pozostawiając koty głodne. O ile właściciel nie zorientuje się samodzielnie, że nie dostał informacji o kamieniu, może to stanowić duży problem.
Dlatego wypadałoby rozbudować program o jakiś mechanizm zabezpieczenia, sprawdzający czy zwierzęta zostały nakarmione danego wieczora, albo przynajmniej zmodyfikować sposób sprawdzania czy nastąpił właśnie zmierzch. Wszak wystarczy porównywać czas z dokładnością do minuty i skorzystać z 60-sekundowego opóźnienia, które i tak autor wprowadził na koniec fazy automatycznego karmienia, by przypadkiem nie wydać dwóch porcji pokarmu pod rząd.
Marcin Karbowniczek, EP












