 Zaloguj
Zaloguj



Schemat ideowy potencjometru ze zdalnym sterowaniem pokazano na rysunku 1. Zasilanie układu, napięcie stale lub zmienne, należy doprowadzić do złącza POW. Mostek B1 i stabilizator IC1 tworzą blok zasilania, który dostarcza napięcia 5 V do zasilania silnika i przekaźnika.
Drugi blok zasilania z układem IC2 to oddzielny stabilizator napięcia +5 V dla mikrokontrolera i jego układów peryferyjnych. Tranzystor T1 i przekaźnik K1 tworzą blok włącznika zasilania. Styki przekaźnika zostały wyprowadzone na złączu REL, mogą załączać zasilanie napięciem 230 VAC lub dowolny inny obwód.
Układ BA6418 wraz z kilkoma elementami RC to blok sterowania silnikiem, ostatni blok - sterujący, obejmuje mikrokontroler ATtiny85, odbiornik podczerwieni, przycisk i diodę LED. Jednak najważniejszym elementem urządzenia jest program sterujący umieszczony w pamięci mikrokontrolera.
Program
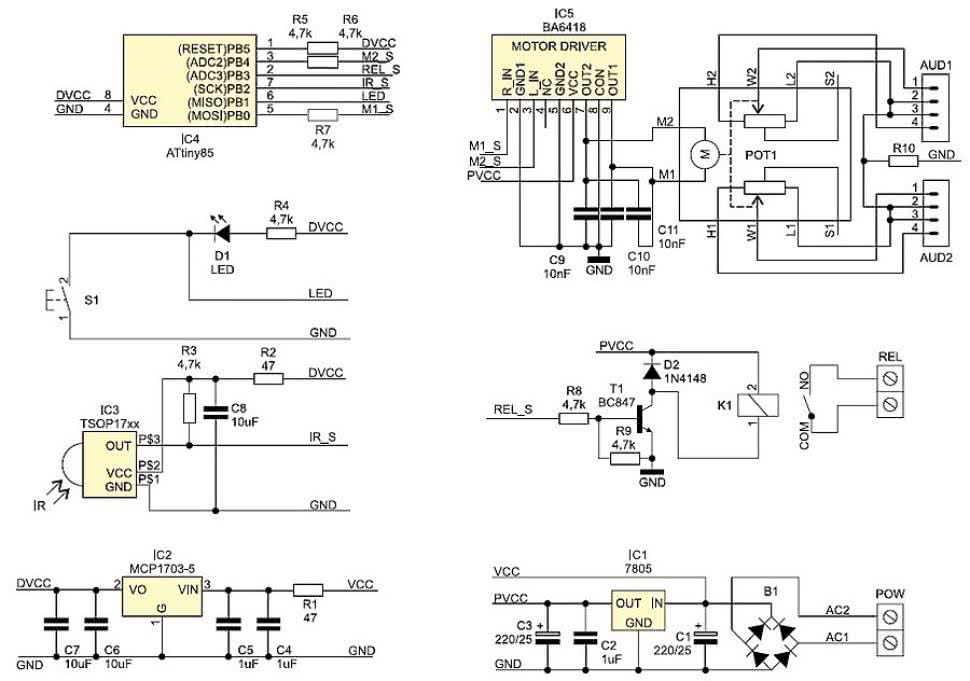
Rysunek 1. Schemat ideowy zdalnie sterowanego potencjometru z przekaźnikiem
Główne zadanie, które wykonuje program, to odbieranie sygnału z odbiornika podczerwieni i odnajdowanie w tym sygnale ramek, czyli kodów wysyłanych z pilota IR. Taka ramka zawiera zwykle od kilkunastu do kilkudziesięciu impulsów, których czasy trwania i czasy przerwy z reguły mieszczą się w przedziale od 0,2 ms do 3 ms. Program pozwala na pomiar impulsów o długości do 8 ms, a jeżeli na wejściu sygnału, utrzyma się niezmieniony stan przez 8 ms to jest to znak, że nadawanie jednej ramki zostało zakończone i najbliższy impuls będzie początkiem nowej ramki.
Gdy pojawi się sygnał z odbiornika podczerwieni, program odmierza czasy impulsów i czasy przerw pomiędzy nimi i zapisuje wyniki w tablicy aż do kolejnej przerwy 8-milisekundowej lub do uzyskania 64 pomiarów. Zatem jedynymi ograniczeniami co do pilota (kodu), którego urządzenie potrafisię "nauczyć" jest czas każdego pojedynczego impulsu i przerwy które muszą zawierać się we wspomnianych granicach oraz maksymalna długość kodu - 32 impulsy (i 32 przerwy).
Ostatni warunek to częstotliwość modulacji sygnału IR - każdy pilot wysyła kody na jakiejś częstotliwości nośnej, najpopularniejsza, najczęściej spotykana to 36 kHz mniej popularne to 38 kHz czy 40 kHz. Zastosowany odbiornik podczerwieni TSOP1736 jest zestrojony dla sygnałów o częstotliwości nośnej 36 kHz, ale z nieco mniejszą czułością odbiera również 38 kHz. W razie potrzeby odbiornik można wymienić na podobny, o innej częstotliwości nośnej.
Pomiar czasów trwania impulsów jest wykonywany za pomocą układu czasowo-licznikowego TIMER0, który jest skonfigurowany do pracy z okresem ok 8 ms i rozdzielczością 0,032 ms. Każda zmiana stanu z wejścia odbierającego sygnał IR generuje przerwanie, a podprogram obsługi przerwania powoduje odczyt i zapisanie w tablicy scan.buffer[] stanu licznika i wyzerowanie go w celu ponownego odliczania.
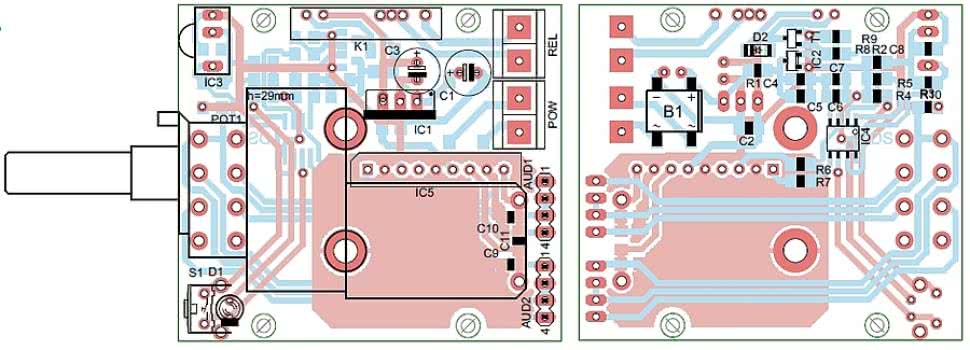
Rysunek 2. Schemat montażowy zdalnie sterowanego potencjometru z przekaźnikiem
Po skompletowaniu całej ramki zmienna scan.status przyjmuje wartość SCAN_COMPLETE i blokuje nadpisywanie tablicy do momentu wyzerowania statusu. Utworzona tablica jest porównywana z ramkami zapisanymi w pamięci EEPROM mikrokontrolera z uwzględnieniem pewnej tolerancji określonej stałą SCAN_PULSE_TOLERANCE. Jeśli porównanie da wynik pozytywny, to jest podejmowana odpowiednia akcja - obrót silnika w prawo lub lewo, lub zmiana stanu przekaźnika.
Niektóre standardy transmisji na podczerwień wstawiają w ramce bit zmienny - np. RC5 i zawarty w nim toggle bit. W takim przypadku urządzenie reagowałoby tylko na co drugie naciśnięcie przycisku pilota. Problem ten został rozwiązany w ten sposób, że urządzenie zapamiętuje dwa kody pilota dla jednej funkcji - jest to sposób prosty, ale wymaga stosunkowo dużo pamięci, dlatego urządzeniem steruje mikrokontroler ATtiny85 (512 B pamięci EEPROM).
Krótkie przyciśniecie przycisku pozwala zmieniać stan przekaźnika. Ze względu na niewielką liczbę wyprowadzeń mikrokontrolera przycisk jest dołączony do tego samego portu, co dioda LED. Stan aktywny, któremu odpowiada załączenie przekaźnika, powoduje świecenie się diody. W tym czasie dioda jest cyklicznie wygaszana na czas ok 1 ms i wtedy sprawdzany jest stan przycisku. Cały proces przebiega tak szybko, że oko ludzkie tego nie dostrzega.
Konfigurowanie
Wprowadzenie układu w tryb konfigurowania wymaga przytrzymania przycisku przez ok 5 s. Po zwolnieniu przycisku dioda LED będzie migała, a potencjometr obróci się lekko w lewo. Teraz układ czeka na dwie komendy z pilota, które będą odpowiadały za zmniejszenie poziomu głośności. W większości przypadków będziemy chcieli, aby tylko jeden przycisk pełnił taką funkcję, więc należy wcisnąć go dwa razy.
Taka czynność jest niezbędna do prawidłowej współpracy z niektórymi pilotami, o czym była mowa wcześniej. Każdy prawidłowo odebrany kod zostanie zasygnalizowany dłuższym świeceniem się diody. Po drugim kodzie potencjometr obróci się w prawo sygnalizując kolejny etap konfiguracji - zwiększanie poziomu głośności, a po czwartym załączy się na krótko przekaźnik. Po odebraniu wszystkich sześciu komend układ powróci do stanu normalnej pracy z nowymi ustawieniami.
Wykaz elementówRezystory: (SMD1206) Kondensatory: (SMD1206) Półprzewodniki: Inne: |
Montaż i uruchomienie
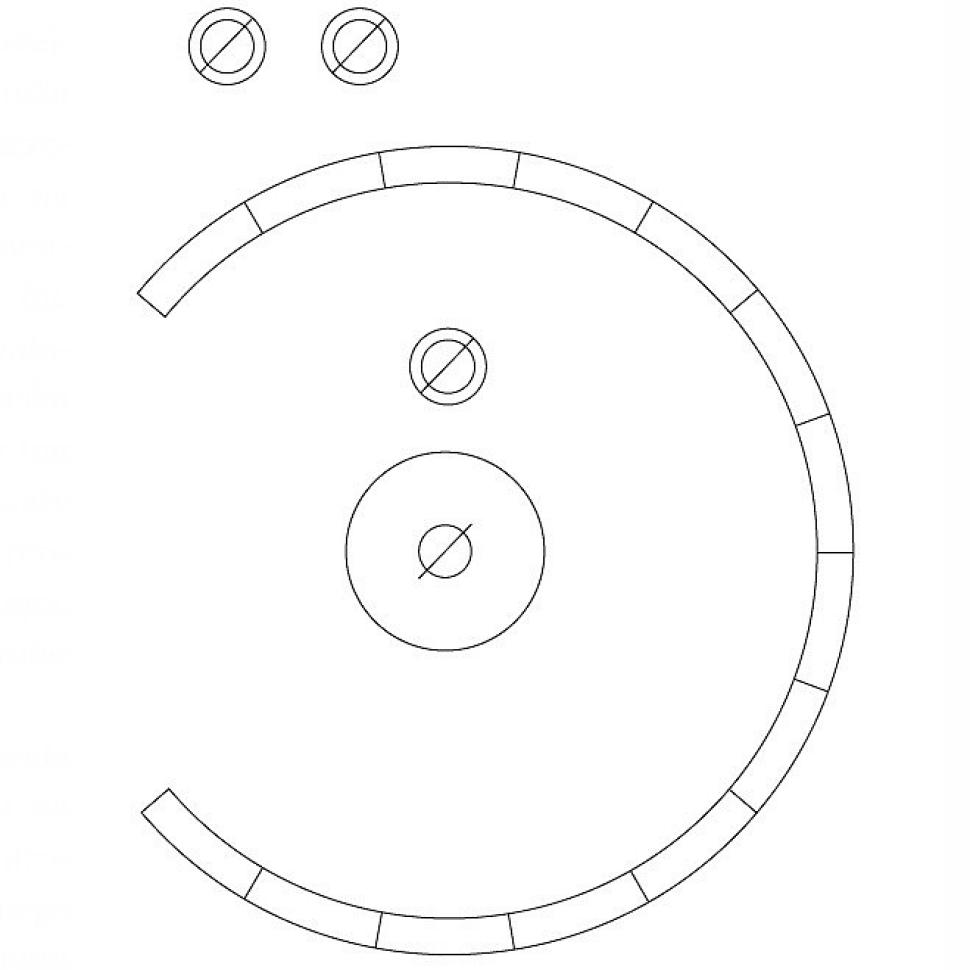
Rysunek 3. Propozycja wykonania panelu czołowego
Montaż wykonujemy według ogólnych zasad, zgodnie ze schematem montażowym z rysunku 2. Diodę LED montujemy tak, aby wystawała ok 1,5 cm ponad płytkę, a następnie zaginamy w stronę przycisku, aby znajdowała się nad nim. Moduł potencjometru z silnikiem montujemy jako ostatni. Należy pamiętać o połączeniu wyprowadzeń silnika z płytką za pomocą dwóch odcinków srebrzanki.
Warto również skrócić oś potencjometru o kilka mm. Wtedy gałkę można nasunąć głębiej, aż do samej ścianki panelu frontowego. Obie sekcje potencjometru zostały wyprowadzone na złącza AUD1 i AUD2. Sygnały audio lewego i prawego kanału należy dołączyć do wyprowadzeń 3 i 4 (4 - wejście sygnału, 3 - masa).
Wyjścia sygnału znajdują się na nóżkach 1 i 2 (1 - wyjście sygnału, 2 - masa). Numeracja wyprowadzeń jest widoczna na schemacie oraz na płytce. Zmontowaną płytkę warto wyposażyć w dedykowany panel frontowy wykonany z laminatu - pokazano go na rysunku 3. Po skonfigurowaniu potencjometr jest gotowy do pracy.
Na koniec warto wspomnieć, ze potencjometry stereofoniczne dostępne powszechnie w handlu mogą mieć niewielkie różnice parametrów dla jednego i drugiego kanału, słyszalne przy ustawieniu w okolicach minimum głośności. Zwykle, udaje się takie potencjometry "dostroić" poprzez minimalne przesunięcie płytek z warstwami rezystancyjnymi, względem siebie. Wadę taką można też skorygować odpowiednim ustawieniem balansu wzmacniacza końcowego.
KS












