Zaloguj
Zaloguj




Po zainstalowaniu silników w roletach najbardziej znienawidzoną czynnością stało się poranne/wieczorne naciskanie palcem przycisku sterującego aż do momentu całkowitego odsłonięcia/zasunięcia rolety. Pierwszym pomysłem mającym usprawnić to wyczerpujące zadanie był oczywiście układ samo podtrzymania przycisku tak, aby roleta odsuwała się (lub zasłoniła) po jednorazowym dotknięciu wyłącznika.
Po zaimplementowaniu takiego rozwiązania nieprawdopodobną uciążliwością okazał się poranny/wieczorny obchód wszystkich (aż trzech!) okien celem właściwego ustawienia rolety. Tego już było z wiele. Rolety należało wyposażyć w sterownik bezprzewodowy.
Architektura systemu

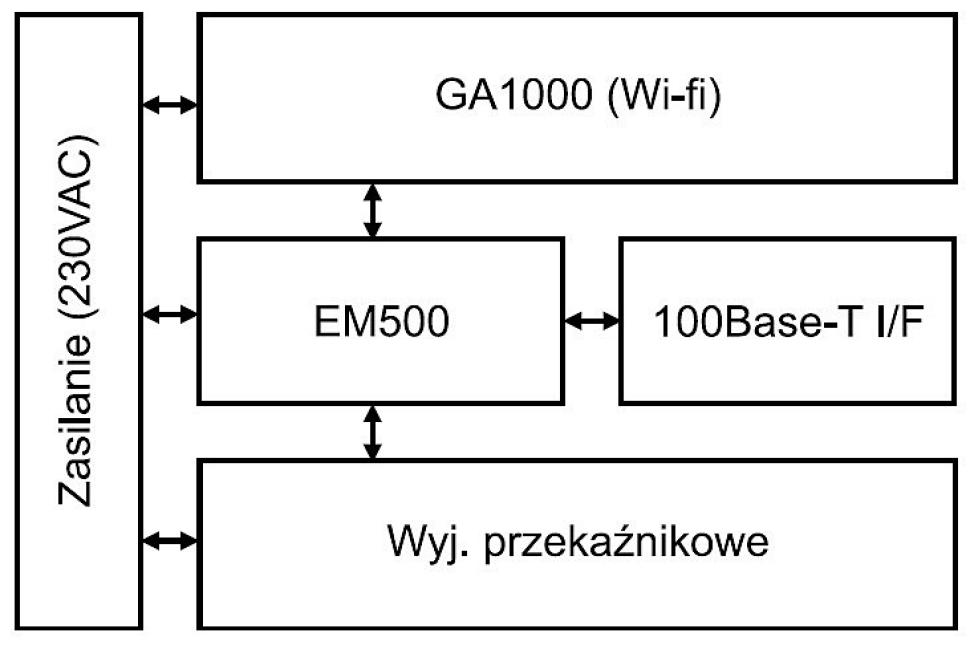
Rysunek 1. Architektura systemu
Na rynku dostępnych jest wiele gotowych systemów i podsystemów tzw. inteligentnego budynku. Każdy z nich w jakimś stopniu umożliwia bezprzewodową kontrolę rolet napędzanych silnikiem elektrycznym. Zwykle jednak są to układy wykonawcze z interfejsem radiowym, które komunikują się z centralką systemu. Układ staje się zatem uciążliwy w zastosowaniu, nie wspominając już o kosztach. Jednocześnie takie rozwiązanie sprawdza się najlepiej w przypadku uwzględnienia go już na etapie projektowania budynku. Jego implementacja w istniejących mieszkaniach może być utrudniona, jeśli nie niemożliwa.
Innym sposobem na realizację zdalnego sterowania rolet okiennych są silniki ze zintegrowanym odbiornikiem radiowym działającym w paśmie ISM. Producenci takich rozwiązań dostarczają pilota lub panel operatorski do zabudowy.
To rozwiązanie jest najprostsze w zastosowaniu i najbardziej efektywne kosztowo. Jeśli nie przeraża nas fakt posiadania kolejnego pilota (który oczywiście będzie poszukiwany w pośpiechu za każdym razem, gdy będziemy wychodzić z mieszkania), rozwiązanie takie wydaje się najlepsze.
Rysunek 2. Schemat blokowy sterownika
Jednak wciąż (z perspektywy konstruktora) można poczuć pewien niedosyt i niepotrzebną nadmiarowość: niedosyt, bo instalacja powszechnie dostępnych rozwiązań nie daje tyle satysfakcji co budowa własnego urządzenia, nadmiarowość, bo w większości domów i mieszkań mamy już przynajmniej jedną sieć bezprzewodową w postaci punktu dostępowego WiFi.
Czy rzeczywiście dla potrzeb bezprzewodowego sterownia rolet potrzebujemy wprowadzać kolejny link radiowy? W tym momencie być może jaśniejszy stał się tytuł artykułu. Proponowane urządzenie (sterownik rolet) jest wyposażane w interfejs WiFi. Każdy instalowany w domu moduł ma własny adres IP oraz zapisane informacje o punkcie dostępowym, do którego powinien się podłączać. Na rysunku 1 przedstawiono schemat kontekstowy takiego podejścia.
Do realizacji zadania wybrany został moduł Tibbo EM500 wraz z modułem GA1000 odpowiedzialnym za komunikację bezprzewodową. Zatem każdy węzeł (okno) wyposażone będzie w urządzenie, którego schemat blokowy przedstawiono na rysunku 2.
Zasilacz
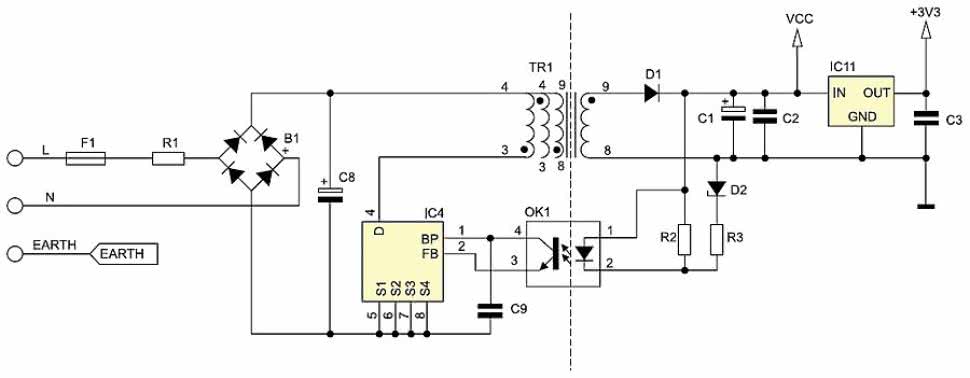
Rysunek 3. Uproszczony schemat aplikacyjny układu LNK362
Rozwiązanie to ma wiele zalet, ale i kilka wad. Największą (w ocenie autora) wadą jest zapewnienia zasilania sterownika w samej obudowie rolety. Problem ten jest wspólny dla wszystkich wymienianych wcześniej rozwiązań. Silniki rolet projektowane są do bezpośredniego zasilania napięciem przemiennym 230 V, zatem moduł musi być również wyposażony (lokalnie) w odpowiedni zasilacz.
Dostępne (łatwo) moduły Ethernet i WiFi mają dosyć wygórowane wymagania dot. poboru prądu tj. 200...400 mA (przy napięciu zasilania 3,3...5 V). Zastosowanie standardowego zasilacza transformatorowego będzie skutkowało dość dużym gabarytowo modułem, który z kolei może być trudno montowalny w typowej obudowie rolety. Rozwiązania beztransformatorowe również nie wchodzą w grę z uwagi na znikome możliwości prądowe.
Paradoksalnie w tym przypadku wadą nie byłaby ich druga, zwykle niekorzystna właściwość, czyli brak izolacji galwanicznej (tę zapewnia nam sam fakt bezprzewodowego sterowania urządzeniem). Pozostaje zastanowić się nad zasilaczem impulsowym łączącym obie potrzebne nam zalety: małe gabaryty oraz dużą wydajność prądową. W projekcie zastosowano układ LNK362 (produkcji Power Integrations).

Rysunek 4. Budowa wewnętrzna układu LNK362
Na rysunku 3 przedstawiono schemat aplikacyjny zastosowanego zasilacza. Urządzenie potrzebuje dwóch napięć stałych: 3,3 V - zasilanie modułów Tibbo oraz 5 V zasilanie przekaźników sterujących silnikiem rolet. Schemat niewiele odbiega od noty aplikacyjnej układu LNK362. Baczną uwagę należy zwrócić na obwód pierwotny zasilacza.
Zastosowano tu podwójne zabezpieczenie w postaci bezpiecznika F1 (bezpiecznik zwłoczny) i rezystora bezpiecznikowego R1. Pierwszy element chroni układ przed zbyt dużym poborem prądu przez sam silnik rolet, co wyjaśni dokładniej pełny schemat urządzenia. Drugi jest elementem zabezpieczającym obwód zasilacza i modułów.
Napięcie przemienne po wyprostowaniu (mostek B1) i filtracji prze kondensator C8, którego nominalne napięcie pracy musi wynosić min 400 V - należy pamiętać, iż wartość szczytowa napięcia sieci to 325 V), trafia bezpośrednio na uzwojenie pierwotne transformatora TR1 gdzie kluczowane jest przez wyjściowy tranzystor mocy układu IC4 (podłączany w konfiguracji wspólnego źródła).

Rysunek 5. Moduł EM500
Częstotliwość pracy układu wynosi ok. 132 kHz natomiast wypełnienie przebiegu napięcia na drenie układu IC4 decyduje o wartości napięcia wyjściowego zasilacza. Wypełnienie to jest sterowane za pomocą obwodu sprzężenia zwrotnego złożonego z optoizolatora OK1, rezystora R3 i diody D2. Rezystor R3 ma rezystancję 390 Ω (zgodnie z notą aplikacyjną układu), natomiast napięcie przebicia diody D2 wynosi 4,3 V. Pozwoliło to na uzyskanie napięcia VCC równego 5 V.
Oczywiście, poza samą stabilizacją napięcia, układ LNK362 zapewnia ochronę termiczną, zwarciową i nadprądową. Ponadto, ma układ autorestartu działający w przypadku zwarcia obwodu wyjściowego bądź przerwania pętli sprzężenia zwrotnego. Najważniejszą jednak zaletą układu jest zintegrowany generator napięcia wstępnego (koniecznego przy rozruchu zasilacza impulsowego), co pozawala na zastosowanie transformatora bez dodatkowego uzwojenia. Układ pozwala na zmniejszenie liczby niezbędnych komponentów zewnętrznych.
Dodatkowo jest on dostępny w obudowie do montażu powierzchniowego (SO8), zachowując przy tym wszystkie wymogi bezpieczeństwa dot. odległości wyprowadzeń, pozwalające na zaprojektowanie bezpiecznego obwodu drukowanego. Budowa wewnętrzna układu LNK362 przedstawiona została na rysunku 4. Ostatnim elementem zasilacza jest stabilizator liniowy IC11 zapewniający zasilanie modułów EM500 i GA1000 (3,3 V).
Wykaz elementówRezystory: Kondensatory: Półprzewodniki: Inne: |
Moduły EM500 i GA1000
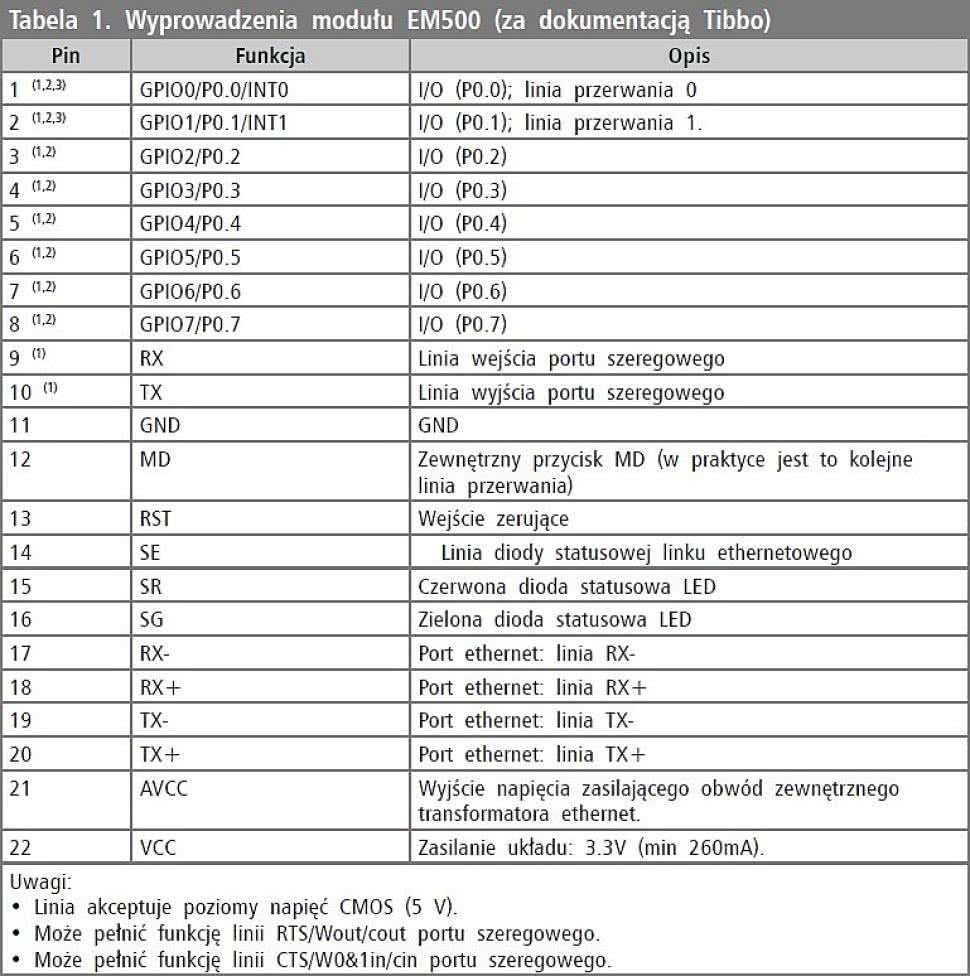
Tabela 1. Wyprowadzenia modułu EM500 (za dokumentacją Tibbo)
EM500 jest najmniejszym (pod względem gabarytów) modułem firmy Tibbo (rysunek 5). Wyprowadzenia zgrupowane zostały w pojedynczym 22-pionowym konektorze szpilkowym (tabela 1). Moduł ma 512 kB wewnętrznej pamięci Flash, która jest dzielona pomiędzy aplikację użytkownika (320 kB) a systemem operacyjnym TiOS (192 kB).
Ponadto, moduł ma 208 bajtów pamięci typu EEPROM, głównie do przechowywania danych konfiguracyjnych. W EM500 pamięć ta nabiera szczególnego znaczenia, gdyż moduł nie ma wewnętrznego dysku Flash. System operacyjny modułu EM500 udostępnia wprawdzie obiekt fd będący sterownikiem dysku Flash, jednak może on współpracować jedynie z zewnętrznymi pamięciami dołączanymi poprzez magistrale SPI.
Innymi słowy: pamięć EEPROM jest jedyną pamięcią nieulotną modułu dostępną z poziomu aplikacji. Pamięć RAM modułu nieznacznie przekracza 16 kB i jest współdzielona pomiędzy zmiennymi a buforami interfejsów komunikacyjnych modułu (ethernetowego oraz szeregowego). W praktyce oznacza to, że czym więcej pamięci przeznaczymy na obsługę wielu połączeń TCP, tym mniej pozostanie do dyspozycji dla aplikacji.
Pewną komplikacją w stosowaniu EM500 jest to, że wymaga on zewnętrznego układu generowania sygnału reset. Ponadto, producent rekomenduje użycie specjalizowanych układów zerowania np. MCP130-300, co nie wpływa korzystnie na budżet projektu, w którym chcielibyśmy użyć EM500.
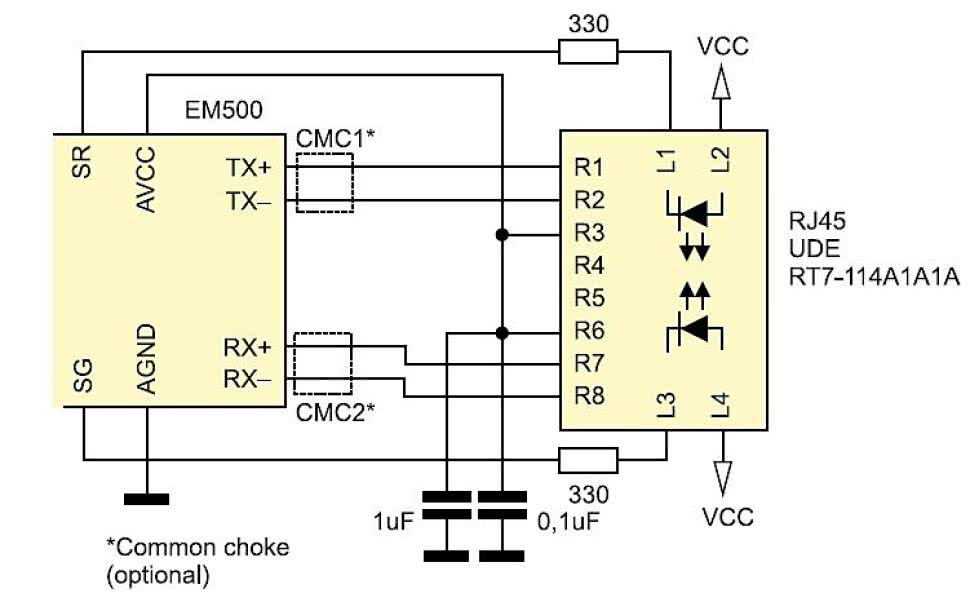
Rysunek 6. Schemat połączenia gniazda RJ45 ze zintegrowanym transformatorem (za dokumentacją Tibbo)
Stosowanie zewnętrznego transformatora oraz gniazda RJ45 również wymaga nieco uwagi. Zgodnie zaleceniami połączenia pomiędzy modułem a elementami zewnętrznymi powinny być jak najkrótsze, co wymusza umiejscowienie modułu bardzo blisko gniazda. Port ethernetowy jest zgodny ze standardem 10/100BaseT oraz auto-MDIX. Przykładowy schemat połączeń pokazano na rysunku 6.
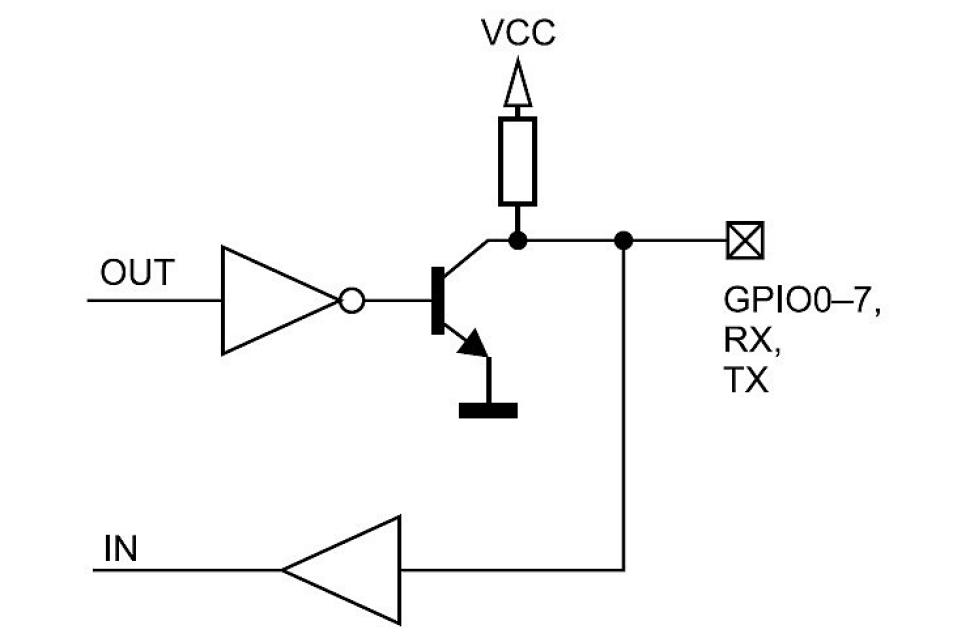
W module EM500 zastosowano szczególną konstrukcję linii I/O (rysunek 7). Bufor wyjściowy to tranzystor pracujący w układzie otwartego kolektora (niemalże otwartego - w obwodzie występuje słaby rezystor podciągający). Przy tego typu rozwiązaniach należy pamiętać o możliwościach prądowych linii. Dla trybu sink (linia wyzerowana) do portu może wpłynąć prąd o natężeniu maks. 10 mA. Wydajność prądowa linii na poziomie wysokim jest znikoma, co wynika z dużej rezystancji rezystora podciągającego.
Ograniczenie to pozwala jednak na pracę linii w charakterze wejścia. Należy jednak pamiętać, że aby odczytać wartość logiczną przyłożona do linii wejściowej należy najpierw ustawić ją (a tym samym otworzyć tranzystor). Podejście takie nie upraszcza obsługi portu z poziomu programu (wciąż należy pamiętać o odpowiedniej konfiguracji linii dla odczytu poziomu logicznego), zmniejsza jedynie liczbę rejestrów, którymi musimy manipulować.
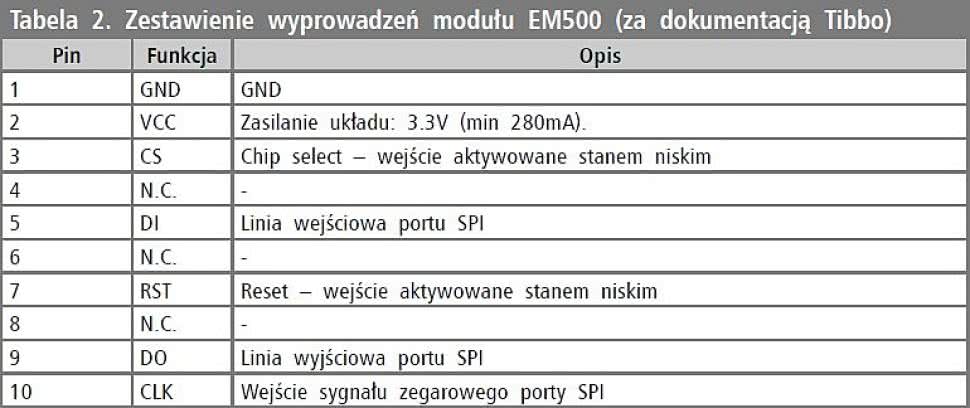
Tabela 2. Zestawienie wyprowadzeń modułu EM500 (za dokumentacją Tibbo)
GA1000 (rysunek 8) jest modułem rozszerzającym możliwości komunikacji platform Tibbo o standard IEEE 802.11.b/g, (czyli popularny WiFi). Moduł (a właściwie jego firmware) wspiera standardy szyfrowania WEP, WPA-PSK i WPA2-PSK. GA1000 komunikuje się z modułem nadrzędnym (np. EM500) za pomocą interfejsu SPI (wykorzystującym w większości przypadków 5 linii I/O). Obecnie obsługę GA 1000 umożliwiają moduły EM1000, EM1202, EM1206 oraz EM500.
Moduł wyposażony jest w antenę wewnętrzną (w postaci komponentu SMD tzw. chip antenna) oraz złącze umożliwiające podłączenie zewnętrznej anteny. Na module jest również umieszczona dioda LED obrazująca stan pracy. Moduł pobiera do 280 mA prądu przy zasilaniu 3,3 V. GA1000 wyposażony jest w 10-pinowe złącze, którego opis umieszczono w tabeli 2.
Podłączenie modułu GA1000 do EM500 w sposób rekomendowany przez producenta pozwala na ograniczenie niezbędnych linii I/O do trzech. Jest to możliwe dzięki "dwukierunkowym" buforom linii IO w EM500 (pozwalającym na połączenie linii DI i DO oraz na zastosowaniu logicznego układu (składającego się z dwóch bramek NAND, którego celem jest generowanie sygnału resetu przy inicjalizacji modułu GA1000 (sygnał resetu powstaje z kombinacji sygnałów CS i zegarowego - CLK).
Rysunek 7. Budowa wewnętrznego bufora linii IO w module EM500
Liczba linii IO w module EM500 wynosi zaledwie 8, zatem zastosowanie układu połączeń takiego jak przedstawiony na rysunku 9 pozostawia do dyspozycji użytkownika 5 linii IO (w opisywanym sterowniku rolet program korzysta z trzech linii cyfrowych). Linie IO potrzebne do zrealizowania tego połączenia (GPIO5,6 i 7 w EM500) nie mogą być zmieniane (nie ma możliwości ich programowej rekonfiguracji).
Po doprowadzeniu zasilania moduł nadrzędny (w naszym przypadku EM500) musi rozpocząć procedurę transmisji firmware. Jest on dostarczany przez Tibbo w postaci pliku binarnego, który jest dołączany do projektu. Ponieważ GA1000 nie ma pamięci nieulotnej, procedurę ładowania firmware należy wykonywać po utracie i odzyskaniu zasilania.
Procedura ta jest szybka i nie powoduje duży opóźnień w starcie systemu. Moduł może pracować w konfiguracji klienta sieci WiFi, jak również ma możliwość tworzenia sieci typu ad-hoc, co daje spore możliwości konfiguracji w przypadku budowy systemów, które w ogóle nie będą miały łączności przewodowej.
Schemat sterownika
Rysunek 8. Moduł GA1000
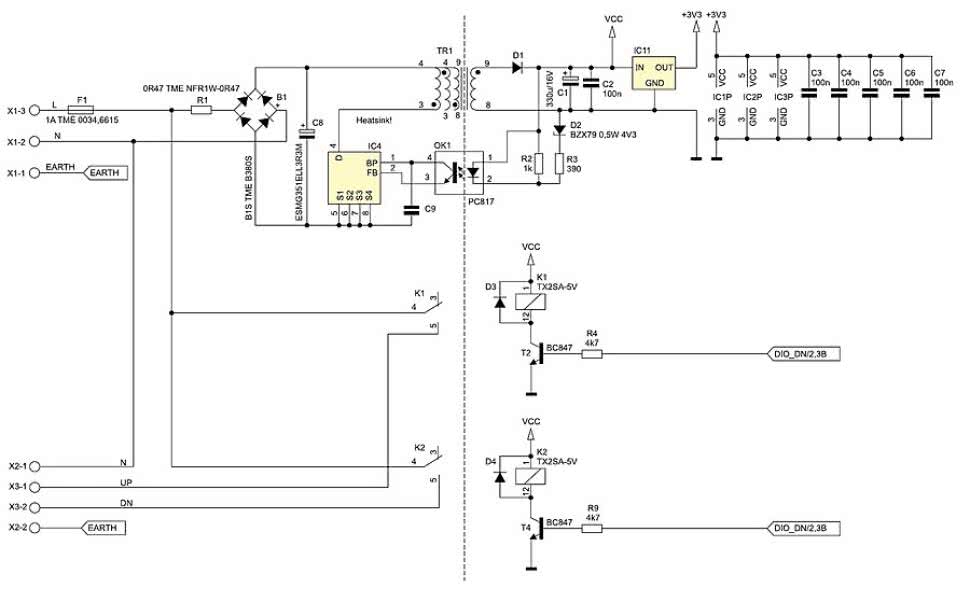
Na rysunku 10 i rysunku 11 przedstawiono kompletny schemat sterownika. Rysunek 10 zawiera część wysokonapięciową, w tym omawiany już zasilacz. Ponadto na schemacie znajdują się przekaźniki wykonawcze sterujące bezpośrednio silnikiem rolety. Wszystkie wyprowadzenia silnika dołączane są do złącza X2.
Typowo są to dwa wyprowadzenia fazy, jedno powodujące obrót silnika w jedną stronę oraz drugi powodujący obrót silnika w stronę przeciwną (oznaczone na schemacie, jako UP i DN), wyprowadzenie przewodu neutralnego (N) oraz przewodu ochronnego (EARTH). Przekaźniki sterowane są poprzez tranzystory bipolarne z równolegle podłączonymi diodami zabezpieczającymi D3 i D4.
Na rysunku 11 przedstawiono schemat części sterującej. Głównym elementem jest oczywiście moduł EM500. Do prawidłowej pracy modułu niezbędny jest zewnętrzy układ zerujący (IC10). Sterownik został wyposażony również w gniazdo ethernetowe ze zintegrowanym transformatorem separującym. Gniazdo potrzebne jest właściwie jedynie do załadownia kodu programu do modułu EM500, ale może również służyć jako główny interfejs do komunikacji ze sterownikiem.
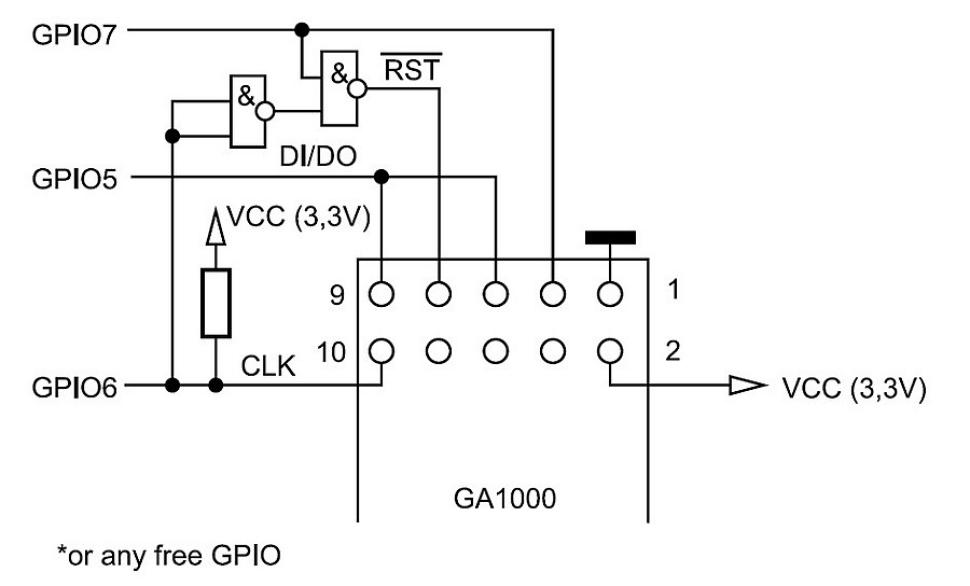
Rysunek 9. Sposób podłączenia modułu GA1000 do EM500
W takim przypadku nie ma konieczności wyposażania płytki w moduł GA1000. Podobnie: nie ma konieczności montażu złącza ethernetowego, jeśli do komunikacji z modułem będziemy używali jedynie interfejsu WiFi. W tym przypadku moduł EM500 należy zaprogramować przed montażem. Oba moduły Tibbo są dołączane do układu poprzez podstawki.
Układ jest również wyposażony w przycisk "MD", który normalnie nie jest wykorzystywany (służy do celów diagnostycznych modułu EM500 oraz do przywracania domyślnych ustawień sieciowych interfejsu ethernet). Na schemacie widać również pewną modyfikację podłączenia modułu w stosunku do schematu przedstawionego na rysunku 9. Modyfikacja (w postaci dodatkowej bramki OR - IC3) pozwala na zerowanie modułu GA1000 z poziomu oprogramowania modułu EM500.
Rysunek 10. Schemat ideowy wysokonapięciowej części sterownika
Rozwiązanie takie jest niezbędne wówczas, gdy EM500 zostanie przypadkowo zresetowany (np. w wyniku błędu programu lub problemów z zasilaniem) i jednocześnie GA1000 nie zostanie wyzerowany. W takim przypadku moduł EM500 rozpocznie wykonywanie swojego programu od inicjalizacji GA1000, który nie będzie na tę procedurę reagował (pozostając np. podłączony do sieci WiFi).
Rozwiązanie to oprócz podnoszenia niezawodności całego systemu jest niezwykle wygodne podczas pracy nad kodem modułu EM500, kiedy to następuje wielokrotne zerowanie modułu bez odłączania jego zasilania (w przypadku pracy z debuggerem). Również w przypadku konieczności zmiany trybu pracy modułu GA1000 na sieć "ad-hoc" musimy mieć możliwość jego zerowania z poziomu programu, bez odłączania zasilania.
Na rysunku 12 przedstawiono schemat montażowy płytki drukowanej sterownika. Należy zwrócić uwagę na linię separującą sekcję wysokonapięciową od niskonapięciowej. Separacja jest zrealizowana poprzez transformator TR1, optoizolator OK1 oraz przekaźniki elektromagnetyczne K1 i K2. Z uwagi na ilość ciepła wydzielanego przez układ IC4, został on wyposażony w duży obszar miedzi po obu stronach PCB połączonych przelotkami.
Oprogramowanie

Rysunek 11. Schemat części sterującej
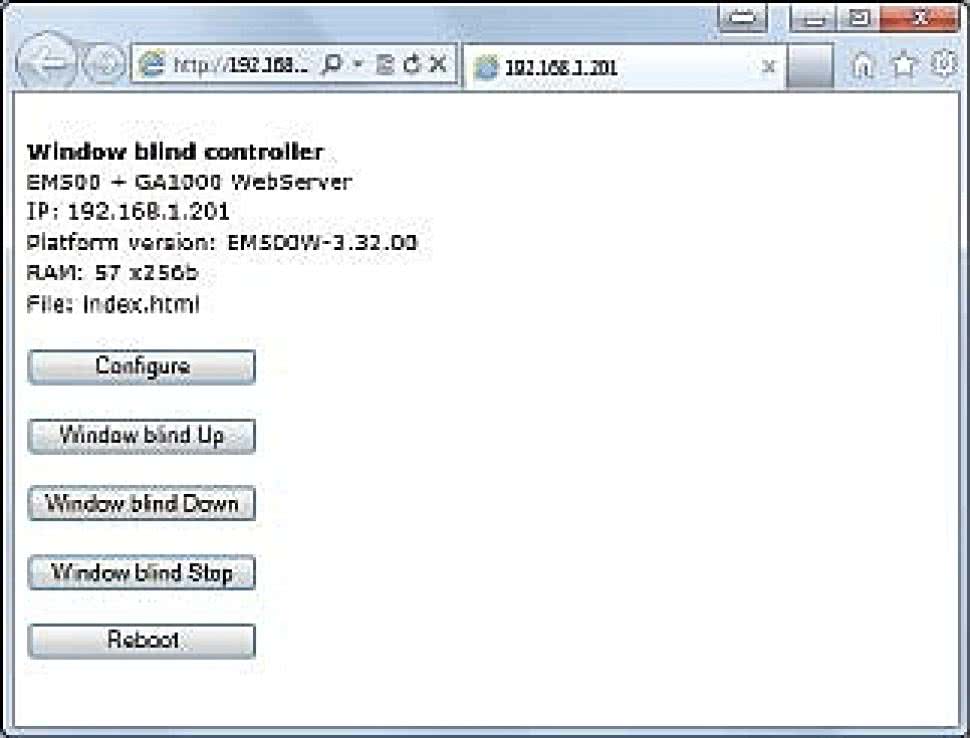
Oprogramowanie modułu umożliwia pełną konfigurację interfejsu ethernetowego oraz realizuje podstawowe funkcje sterownika. Kontrola sterownika możliwa jest wyłącznie poprzez interfejs WWW. Na rysunku 13 Przedstawiono widok głównej strony sterownika. Przyciski Window blind Up, Window blind Down, Window blind Stop umożliwiają odpowiednio ruch rolety w górę, w dół oraz zatrzymanie ruchu.
Ruch rolety w górę/dół będzie trwał do momenty samoczynnego wyłącznie się silnika rolety (silniki są wyposażone w zintegrowane regulowane wyłączniki krańcowe) lub po upływie z góry zadanego czasu. W tym przypadku nawet, jeśli silnik przestanie pracować z powodu rozłączania wyłącznika krańcowego, układ zwolni przekaźnik (a ty samym odłączy napięcie od silnika) po upływie ustalonego czasu. W bieżącej wersji oprogramowania sterownika czas ten nie jest konfigurowalny z poziomu interfejsu WWW.
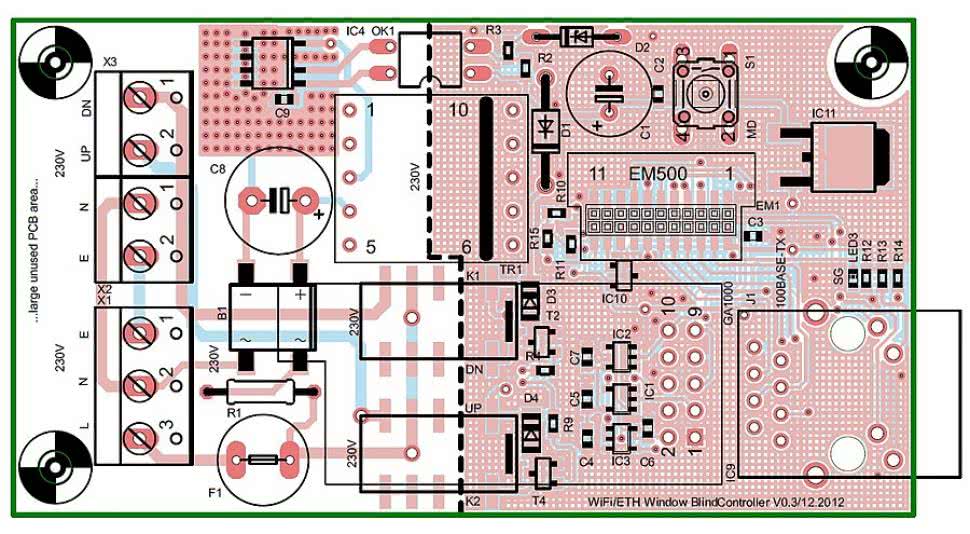
Rysunek 12. Widok górnej warstwy płytki sterownika
Na głównej stronie znajduje się również przycisk Configure, po którego kliknięciu wyświetlona zostanie podstrona widoczna na rysunku 14. Na stronie tej możemy w pełni konfigurować interfejs ethernetowy sterownika wraz z przełączaniem pomiędzy konfiguracją statyczną a DHCP. Widzimy również adres MAC interfejsu.
W obecnej wersji oprogramowania konfiguracja IP interfejsu WiFi jest na stałe zaszyta w kodzie sterownika. Aby zmienić te nastawy należy zmodyfikować kod źródłowy sterownika i po kompilacji zaprogramować moduł. Docelowo oprogramowanie sterownika będzie umożliwiało kompleksową konfigurację interfejsu WiFi.
Po podłączeniu zasilania sterownik uruchamia moduł GA1000 poprzez załadowanie do niego firmware’u i próbuje nawiązać połącznie ze zdefiniowaną siecią. Po udanej próbie moduł sprawdza co 30 sekund czy połącznie nie zostało przerwane (wbrew pozorom zdarza się to dość często) - w takim przypadku moduł natychmiast próbuje odzyskać połączenie. Stan połączenia sygnalizowany jest ciągłym świeceniem diody LED modułu GA1000. Stan próby połączenia sygnalizowany jest szybkim miganiem diody.
Podsumowanie
Rysunek 13. Główna strona sterownika
W zakresie platformy sprzętowej sterownik posiada właściwie wszystkie niezbędne funkcje. Początkowo moduł do sterownia napędu rolet miał wykorzystywać rozwiązanie oparte na triakach, jednak problemy z indukcyjnym charakterem obciążenia (jakim jest silnik rolety), skłoniły autora do zastosowanie zwykłych przekaźników elektromagnetycznych. Minusem projektu (oraz jednocześnie dużym polem do popisu) jest oprogramowanie sterownika (zwłaszcza w zakresie interfejsu WiFi).
Środowisko TIDE udostępnia wiele ciekawych funkcji do obsługi interfejsu WiFi, które mogą zwiększyć funkcjonalność modułu. Są to np. funkcje skanujące dostępne sieci czy np. funkcja sprawdzająca moc sygnału AP. Wspomniana wcześniej możliwość tworzenia własnej sieci ad-hoc pozwala na całkowitą bezprzewodową konfigurację modułu.
Algorytm mógłby wyglądać tak, że po pierwszym uruchomieniu modułu urządzenie eksponuje własną sieć, do której możemy podłączyć się dowolnym innym urządzeniem (np. laptopem czy tabletem). Po podłączeniu i wejściu na główną stronę sterownika moglibyśmy podać mu wszelkie dane potrzebne do podłączania się do naszej sieci domowej (czyli SSID i hasło), po czym wymusić reset sterownika. Po ponownym uruchomieniu sterownik próbowałby nawiązać połączenie z docelową siecią.

Rysunek 14. Podstrona konfiguracyjna
W obecnej wersji oprogramowania zastosowano szyfrowanie WEP (sterownik jest w stanie podłączyć się jedynie do sieci niezabezpieczonej lub zabezpieczonej szyfrowaniem WEP). Szyfrowanie tego typu jest jednak mało skuteczne. TIDE udostępnia funkcję do implementacji szyfrowania typu WPA2-PSK, jednak występują tu pewne niedogodności związane z obliczaniem wartości klucza z hasła dostępu do sieci.
Klucz ten jest obliczany z SSID i hasła dostępu do sieci, z którą chcemy się połączyć przy pomocy algorytmu, którego implementacja wymaga obliczenia około 8000 tzw. "hash-ów" SHA-1. Na współczesnych platformach PC czy tabletach dzieje się to na tyle szybko, że właściwie jest niezauważalne dla użytkownika. Jednak na platformie typu embedded takiej jak Tibbo, której CPU jest taktowane maksymalnie z prędkością 80 MHz może zająć nawet do dwóch minut.
Niedogodność tę należy uwzględnić przy projektowaniu interfejsu użytkownika. Pewnym ułatwieniem jest to, że klucz musi być obliczony tylko raz dla danej sieci. Dopóki nie będziemy chcieli przełączyć się do innej sieci lub nie zmienimy jej nazwy lub hasła, nie będziemy musieli czekać 2 minut przed nawiązaniem połączenia z siecią zabezpieczoną szyfrowaniem WPA2-PSK.
Instalując kilka sterowników w mieszkaniu musimy również zadbać o odpowiednie ich adresowanie. Być może ciekawym pomysłem jest stworzenie dedykowanej aplikacji dla środowiska Android lub iOS, która umożliwiałaby zamykanie i otwieranie rolet na podstawie predefiniowanych ram czasowych. Przy pomocy połącznia VPN możemy również pozwolić na kontrolę rolet z wykorzystaniem Internetu. Możliwości są (właściwie jak zawsze) nieograniczone.
Marcin Chruściel