Zaloguj
Zaloguj




- Zasilanie: 230 V AC/150 VA.
- Częstotliwość napięcia wyjściowego: 0..58 Hz.
- Stały stosunek U/f.
- Wejście RUN/STOP.
- Wejście VAR (potencjometr)/50 Hz.
- Krok częstotliwości napięcia wyjściowego: 0,5 Hz.
- Łagodny start i hamowanie.
- Zabezpieczenie przed przeciążeniem.
- Zwarta konstrukcja umożliwiająca zabudowę bezpośrednio w napędzie.
Wprawdzie w urządzeniach fabrycznie przystosowanych do pracy ze zmienną prędkością obrotową producenci stosują specjalną konstrukcję silnika, w które uzwojenie główne ma wyprowadzone odczepy umożliwiające zmianę prędkości obrotowej. Takie rozwiązania można spotkać w wentylatorach, pompach obiegowych, starszych pralkach. Z kolei w układach wentylacyjnych i chłodniczych stosowało się układy regulacji autotransformatorowej. Co jednak zrobić, gdy silnik nie ma wyprowadzonych odczepów a często, jak to ma miejsce w pompach obiegowych, tworzy nierozbieralny blok z kondensatorem rozruchowym? W takim wypadku jedynym sposobem efektywnej regulacji obrotów jest zmiana częstotliwości napięcia zasilającego silnik.
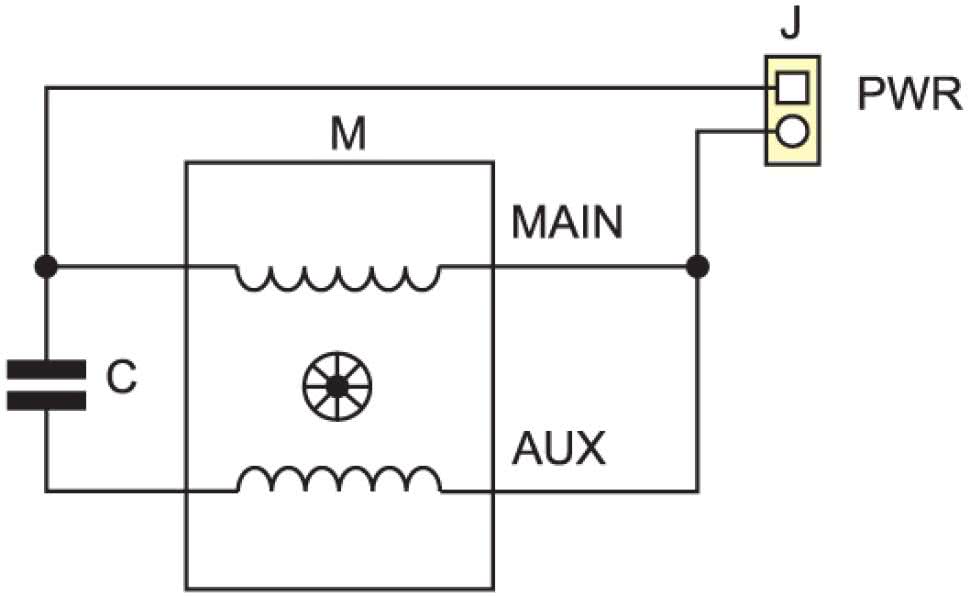
Schemat połączeń silnika z kondensatorem pokazano na rysunku 1. Napięcie zasilania doprowadzone jest do uzwojenia głównego (MAIN) oraz poprzez kondensator do uzwojenia pomocniczego (AUX), kondensator przesuwa fazę zasilania, aby wytworzyć wirujące pole magnetyczne obracające wirnik.
W zasadzie na rynku jest oferowany tylko jeden fabryczny falownik współpracujący z takim typem silnika. Próby wykorzystania jednej lub dwóch faz z falownika 3-fazowego przeważnie kończą się niepowodzeniem, bo zazwyczaj falownik wykrywa nierównomierne obciążenie faz i wyłącza się. W tym drugim wypadku mogą mieć również znaczenie różne parametry uzwojeń MAIN i AUX. Nawet jeśli uda się pokonać te trudności, to koszt takiego rozwiązania, mimo taniejących falowników 3-fazowych, jest znaczny i często porównywalny z wartością sterowanego urządzenia. Pozostaje też świadomość, że 2/3 falownika i większość „zapłaconych” funkcji pozostają niewykorzystane.
Przedstawiony układ jest próbą taniego rozwiązania problemu regulacji prędkości silników asynchronicznych z kondensatorem rozruchowym mających zastosowanie w pompach, wentylatorach i niewielkich obrabiarkach.
Zasada działania
Napięcie stałe na sinusoidalnie zmienne można przekształcić na kilka sposobów. Ze względu na straty mocy rozwiązania liniowe (generator + wzmacniacz mocy) stosuje się dla bardzo małych mocy lub tam gdzie straty nie mają znaczenia. W pozostałych przypadkach stosowane są rozwiązania cyfrowe oparte o różne odmiany modulacji PWM. W przekształtnikach dla silników stosuje się sinusoidalną modulację o zmiennej szerokości impulsu (SPWM). Impulsy w każdej półfali mogą być jednobiegunowe (modulacja unipolarna) lub dwubiegunowe (modulacja bipolarna). Oba typy modulacji pokazano na rysunku 2.
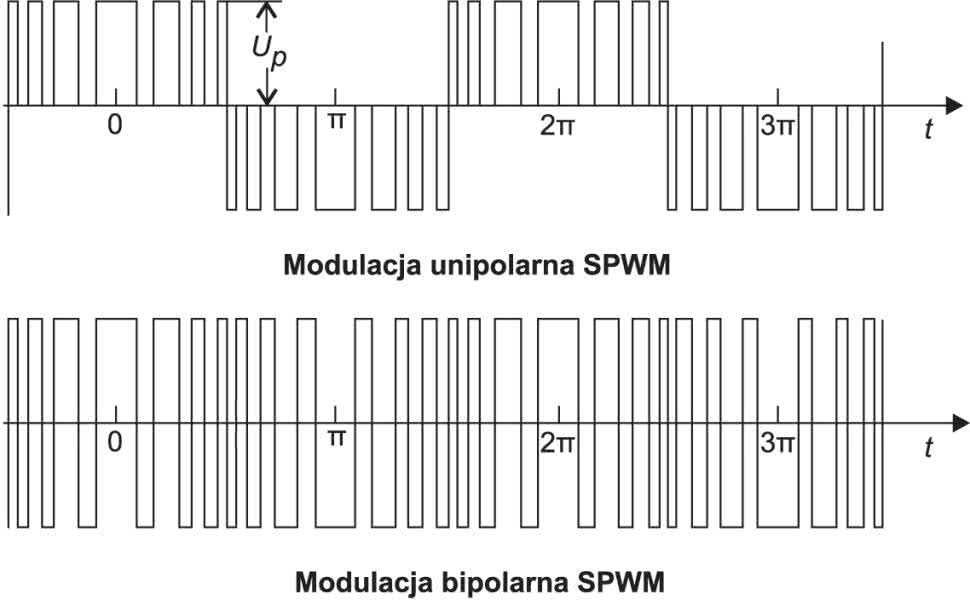
W praktyce łatwiejszy do realizacji jest układ z modulacją bipolarną, bo wystarczy do tego mostek H z gałęziami sterowanymi sygnałami PWM o przeciwnych fazach. Jeśli przy tym wypełnienie będzie zmieniać się sinusoidalnie, otrzymamy modulację SPWM.
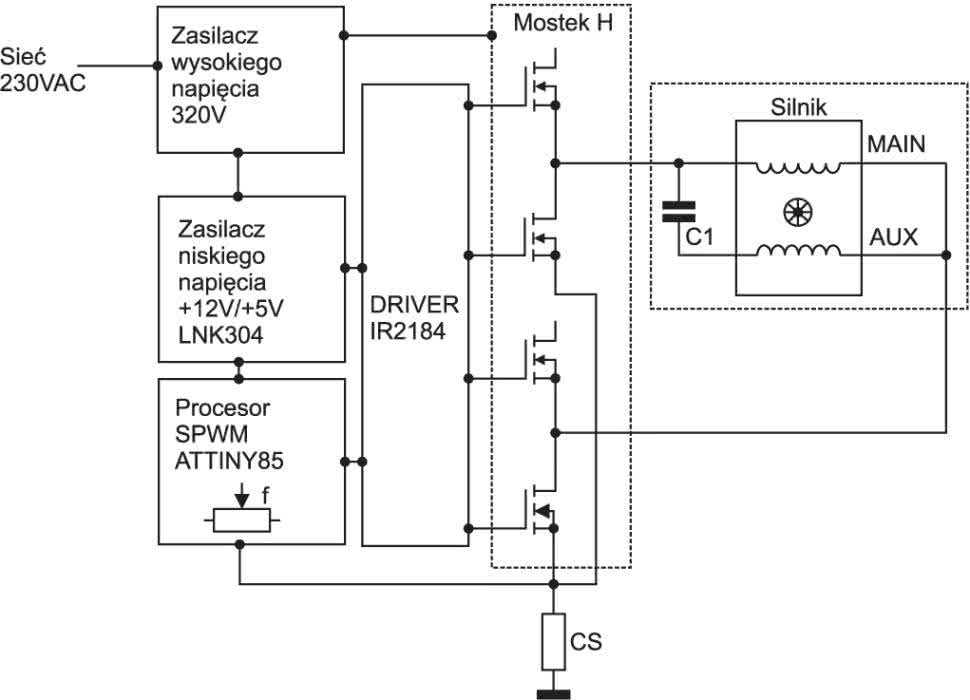
Schemat blokowy falownika przedstawia rysunek 3. Falownik podzielono na dwie płytki: obwodów mocy, której schemat ideowy pokazano na rysunku 4 oraz płytkę sterującą – rysunek 5.

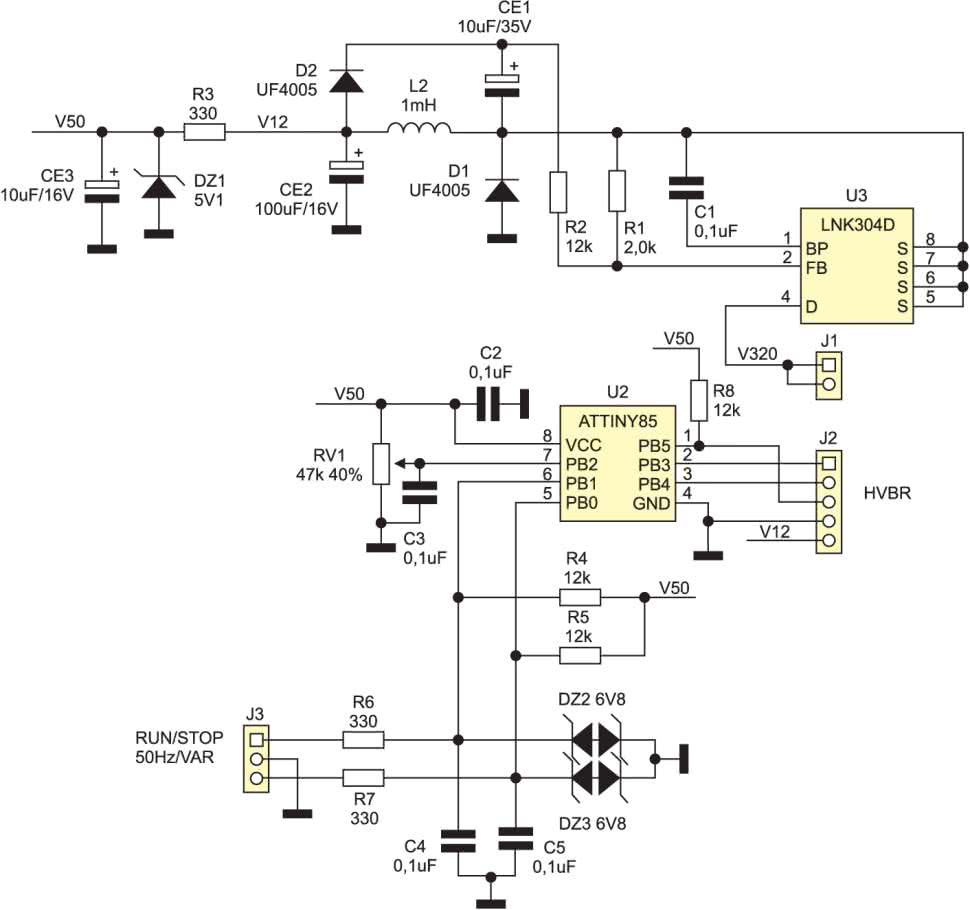
Płytka mocy zawiera zasilacz wysokiego napięcia z prostownikiem mostkowym BR2 i pojemnością filtrującą CE1. Zasilacz dostarcza napięcie stałe 320 V do zasilania mostka H złożonego z tranzystorów Q1…4. Ze względu na wytwarzane zakłócenia, zasilanie jest filtrowane dławikiem L1 i kondensatorami C1 oraz C2. Bramki tranzystory mostka zasilane są przez specjalizowane układy sterowników półmostków typu IR2184. Zapewniające one odpowiedni poziom napięcia na bramkach, a dzięki znacznej wydajności prądowej włączanie i wyłączanie tranzystorów odbywa się szybko oraz jest ograniczana wydzielana moc. Układy te zapobiegają również równoczesnemu załączeniu górnego i dolnego klucza oraz zapewniają odpowiedni czas martwy przy przełączaniu. Prąd zasilający mostek jest monitorowany przez pomiar spadku napięcia na rezystorze bocznikowym R5. Po przekroczeniu 3 amperów tranzystor Q1 natychmiast wyłącza klucze mostka H i zeruje procesor. To proste, ale bardzo skuteczne rozwiązanie.
Część sterująca jest oparta o mikrokontroler ATtiny85 (U2), który na podstawie stanu wejść PB0…1 oraz napięcia suwaka potencjometru RV1 (PB2) generuje dwa sygnały SPWM (PB3/4) o przeciwnych fazach. Układ celowo jest pozbawiony wyświetlacza ze względu na chęć maksymalnego uproszczenia konstrukcji. Dwa wejścia sterujące „RUN/STOP” oraz „50Hz/VAR” umożliwiają dopasowanie falownika do układu sterującego. Wejścia mikrokontrolera są zabezpieczone przed przepięciami za pomocą transili DZ2, DZ3. W wypadku pracy samodzielnej wejścia można skonfigurować na stale zworami.
Wejście „RUN/STOP” po zwarciu pinów 1-2 złącza J3 wymusza start silnika. Zwarcie pinów 2-3 złącza J3 ustawia pracę z częstotliwością regulowaną potencjometrem RV1. Takie rozwiązanie umożliwia np. regulację pracy pompy w piecu dwufunkcyjnym, gdzie podczas pracy w obiegu wody użytkowej jest potrzebna maksymalna wydajność, natomiast przy pracy w obiegu CO, wydajność można zmniejszyć. Innym przykładem może być współpraca z wentylatorem fancoila, gdzie rozruch należy wykonać z częstotliwością znamionową, aby nie tracić momentu obrotowego, a po rozruchu można zmniejszyć obroty, żeby obniżyć poziom generowanego hałasu.
Płytka sterująca jest zasilana z układu U3 (LNK304), który jest układem zasilacza beztransformatorowego zastępującego typowy, nieefektywny mocowo układ oparty o redukcję napięcia na kondensatorze szeregowym. Układ stabilizuje napięcie wyjściowe 12 V zasilające drivery mostka H. Napięcie to po obniżeniu do 5 V w układzie stabilizatora równoległego (R3/DZ1) zasila również mikrokontroler oraz polaryzuje obwody wejściowe.
Oprogramowanie falownika
Oprogramowanie falownika napisano w asemblerze i uruchomiono w środowisku AVR Studio udostępnianym bezpłatnie przez firmę Atmel. Program składa się z jednej nieskończonej pętli wykonywanej co 244 takty zegara systemowego 8 MHz. Do odliczania tego czasu użyto timera T1. Ten sam timer wystawia dwa komplementarne sygnały o zmiennym wypełnieniu na wyprowadzeniach OC1B i !OC1B. Te wyjścia sterują dwoma gałęziami mostka H tworząc z indukcyjnością uzwojeń silnika wysokosprawny przetwornik cyfrowo – analogowy. Częstotliwość sygnałów PWM wynosi
Wolnozmienny przebieg wyjściowy jest tworzony programowo z wykorzystaniem bezpośredniej syntezy cyfrowej (DDS). Rejestr o długości 16 bitów pozwala uzyskać krok częstotliwości równy
![]()
Akumulator jest 8-bitowy, zatem po wpisaniu do niego liczby 1 uzyskuje się na wyjściu sygnał o częstotliwości 0,5 Hz. Zapisując wartość 116 uzyskujemy częstotliwość maksymalną równą 58 Hz. Jedna z pośrednich liczb (100) daje teoretycznie 50,03 Hz. Niestety tylko teoretycznie, gdyż dokładność wewnętrznego oscylatora RC wynosi kilka procent. Zasada działania generatorów DDS była wielokrotnie opisywana, a przykład realizacji programowej można znaleźć w opisie generatora audio z EP9/2010.
W falowniku jest konieczne zachowanie stałego stosunku U/f równego 4,6 (230 V/50 Hz). Oznacza to, że dla każdej ze 116 częstotliwości amplituda przebiegu musi być różna. Ze względu na krótki czas obiegu pętli nie ma możliwości wyliczania próbek na bieżąco. Dlatego w pamięci stałej zostały zapisane stablicowane wartości próbek. Przy częstotliwości przebiegu wyjściowego od 0 do 50 Hz dla spełnienia warunku stałości U/f wystarczy proporcjonalnie zmniejszać amplitudę sygnału wyjściowego

gdzie:
freq: 1…100 (100 odpowiada 50 Hz),
angle: 1…64.
Dla częstotliwości przekraczających 50 Hz napięcie wyjściowe powinno mieć 267 VSK (4,6·58 Hz), aby zachować stosunek U/f równy 4,6. Taka wartość skuteczna czystego przebiegu sinusoidalnego wymagałaby zasilania mostek H napięciem 376 V (√2·267 V). Jest to znacznie powyżej 325 V, czyli napięcia, które można uzyskać wprost z wyprostowanego napięcia sieciowego 230 V AC. Podwyższanie amplitudy może nie jest bardzo kłopotliwe w realizacji, bo wystarczyłby niewielki transformator o napięciu wyjściowym rzędu 50 V, ale ograniczeniem jest wytrzymałość napięciowa kondensatorów rozruchowych. Zazwyczaj ich dopuszczalne napięcie pracy wynosi 250…275 V AC. O ile kondensatory zamontowane na zewnątrz korpusu silnika można ostatecznie wymienić, to coraz częściej spotyka się silniki z kondensatorami zabudowanymi wewnątrz, do których dostęp może być bardzo utrudniony.
Problem zbyt niskiego napięcia zasilającego mostek został rozwiązany przez zwiększenie o 15% amplitudy napięcia podstawowego i dodanie trzeciej harmoniczną o amplitudzie równej 15% przebiegu podstawowego (rysunek 6). Dla częstotliwości 58 Hz przebieg jest zgodny ze wzorem
![]()
gdzie:
angle = 1…64.
Napięcie wyjściowe o takim kształcie i amplitudzie 325 V DC (√2·230 V AC) ma wartość skuteczną 267 VSK, czyli współczynnik 4,6 jest zachowany (267 VSK/58 Hz). Do wyliczenia próbek przebiegów o częstotliwościach pośrednich od 50,5 Hz do 57,5 Hz wykorzystano interpolację liniową.
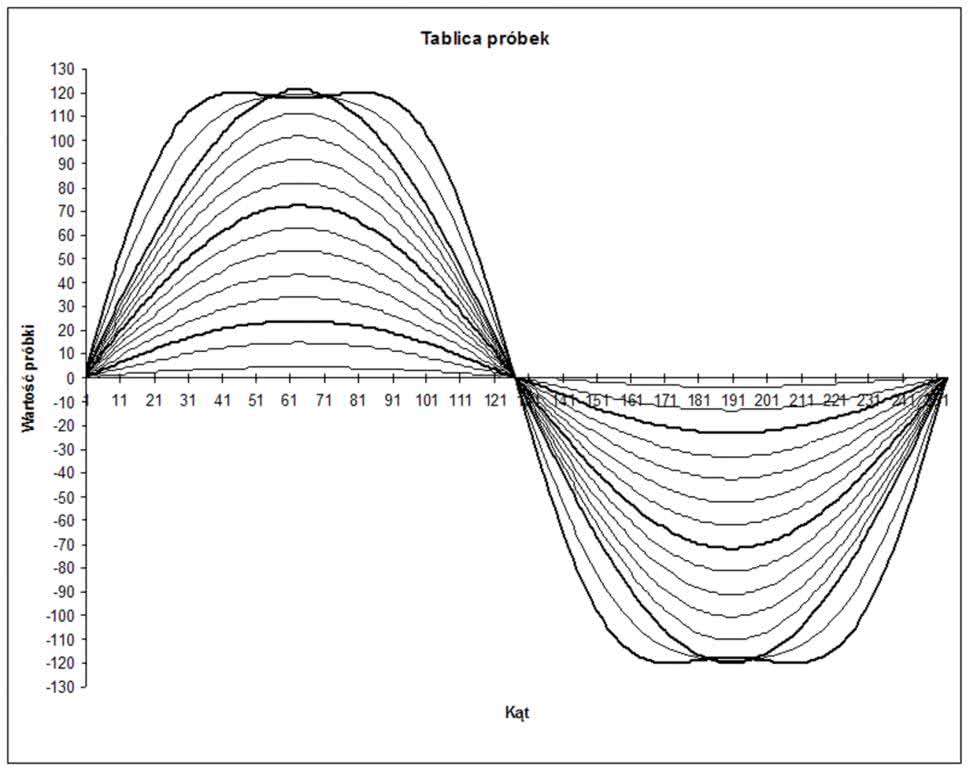
W przedstawionych wyżej wzorach występują tylko 64 próbki obejmujące pierwszą ćwiartkę okresu i tylko te wartości są przechowywane w pamięci. W drugiej ćwiartce okresu wystarczy odwrócenie indeksów tablicy. Trzecia i czwarta ćwiartka wymaga dodatkowo zmiany znaku próbek. Dzięki takiemu rozwiązaniu tablice z próbkami zajmują 25% pamięci, która byłaby potrzebna do zapamiętania całych okresów, a i tak jest to 7424 (116·64) bajtów. Dla lepszej czytelności na wykresie pokazano pełne okresy przebiegów. Wytłuszczone przebiegi mają częstotliwości: 10, 30, 50 i 58 Hz.
Do szybkiego przeliczenia napięcia z suwaka potencjometru (0…255) na nastawę częstotliwości (1…116) w pamięci stałej została zapisana 256-elementowa tablica funkcji liniowej o wartościach 0…115. Procesor po starcie odczytuje 3 bajty z komórek wbudowanej pamięci EEPROM o adresach 1, 2 i 3 (adres 0 jest ignorowany). Bajt o adresie 1 zawiera częstotliwość początkową (rozruchową) napięcia wyjściowego. Przy programowaniu procesora zapisywana jest tam liczba 19, która odpowiada 10 Hz. Zależność częstotliwości od zapisanej liczby określa wyrażenie f[Hz]=(EEPROM[1]+ 1)/2. Dopuszczalne wartości to 0…99, które odpowiadają częstotliwościom 0.5…50 Hz. Liczby spoza tego zakresu są ignorowane i falownik uruchamia silnik od 0,5 Hz. Dwa kolejne bajty określają szybkość zmian częstotliwości przebiegu na wyjściu falownika (rampę). Bajt o adresie 2 determinuje szybkość przyspieszania a bajt o adresie 3 ustala szybkość hamowania, zgodnie ze wzorem df[Hz/s]=100/(1+EEPROM[2 lub 3]). Dopuszczalne są wartości 0…255. Wstępnie w tych komórkach zapisane są liczby 3 i 9.
W takim wypadku częstotliwość wyjściowa rośnie z szybkością 25 Hz/s i spada z szybkością 10 Hz/s. Program sprawdza również stan dwóch zworek (lub przełączników). Wyzerowanie wejścia PB0 (nóżka 5, U2) powoduje, że podstawą syntezy jest napięcie z suwaka potencjometru RV1 odczytane wejściem ADC1 (nóżka 7, U2). Ustawienie wejścia PB0 powoduje generowanie przebiegu o stałej częstotliwości 50 Hz.
Przebiegi na wyjściu falownika pojawią się dopiero po wykryciu niskiego poziomu logicznego na wejściu PB1 (6, U2). Otwarcie tej zwory powoduje stopniowe obniżanie częstotliwości przebiegu wyjściowego, a po osiągnięciu 0,5 Hz, wyłączenie górnych kluczy (Q1, Q3) i załączenie dolnych (Q2, Q4) w obu gałęziach mostka H, co skutkuje szybszym zatrzymaniem się silnika.
Zarówno po załączeniu zasilania jak i po zadziałaniu zabezpieczenia nadprądowego procesor jest sprzętowo zerowany. Ponowna inicjalizacja zajmuje około 64 ms i po tym czasie falownik zaczyna generowanie przebiegu od częstotliwości rozruchowej.
Ze względu na to, że ewentualne zawieszenie się procesora np. z powodu zakłóceń zasilania mogłyby być kosztowne w skutkach, prawidłowy przebieg głównej pętli jest nadzorowany przez układ czuwający watchdog. Jeśli program nie wykona pętli przez 16 ms, to CPU zostanie wyzerowane.
Dzięki zastąpieniu obliczeń gotowymi tablicami czas wykonania całej pętli programu jest znacznie krótszy niż dopuszczalne 244 taktów zegara systemowego, a cały program wraz z inicjalizacją układów peryferyjnych mikrokontrolera zajmuje tylko 127 słów (254 bajtów) pamięci programu.
Czasem odnoszę wrażenie, że umiejętność programowania nawet nieskomplikowanych mikrokontrolerów w asemblerze jest w zaniku, dlatego chciałbym zaprezentować pętlę programu falownika w całości. Program jest stosunkowo krótki i bogato skomentowany, więc Czytelnik znający podstawy asemblera, niekoniecznie dla AVR, nie powinien mieć problemów z analizą programu. Projekty falowników, nawet takich prostych jak nasz, są stosunkowo trudnodostępne, więc w materiałach pomocniczych zamieściliśmy pełny listing programu.
Uwaga: układ elektryczny falownika nie jest galwanicznie odizolowany od sieci energetycznej, dlatego nie przewidzieliśmy na płytce drukowanej złącza ISP i procesor musi zostać zaprogramowany przed włożeniem do podstawki. Przestrzegamy przed próbami podłączania programatora do procesora umieszczonego w układzie. Może to się skończyć uszkodzeniem programatora, komputera oraz porażeniem elektrycznym!
W mikrokontrolerze jest konieczne zaprogramowanie pamięci:
- FLASH plikiem „AC.HEX”.
- EEPROM plikiem „AC.EEP”.
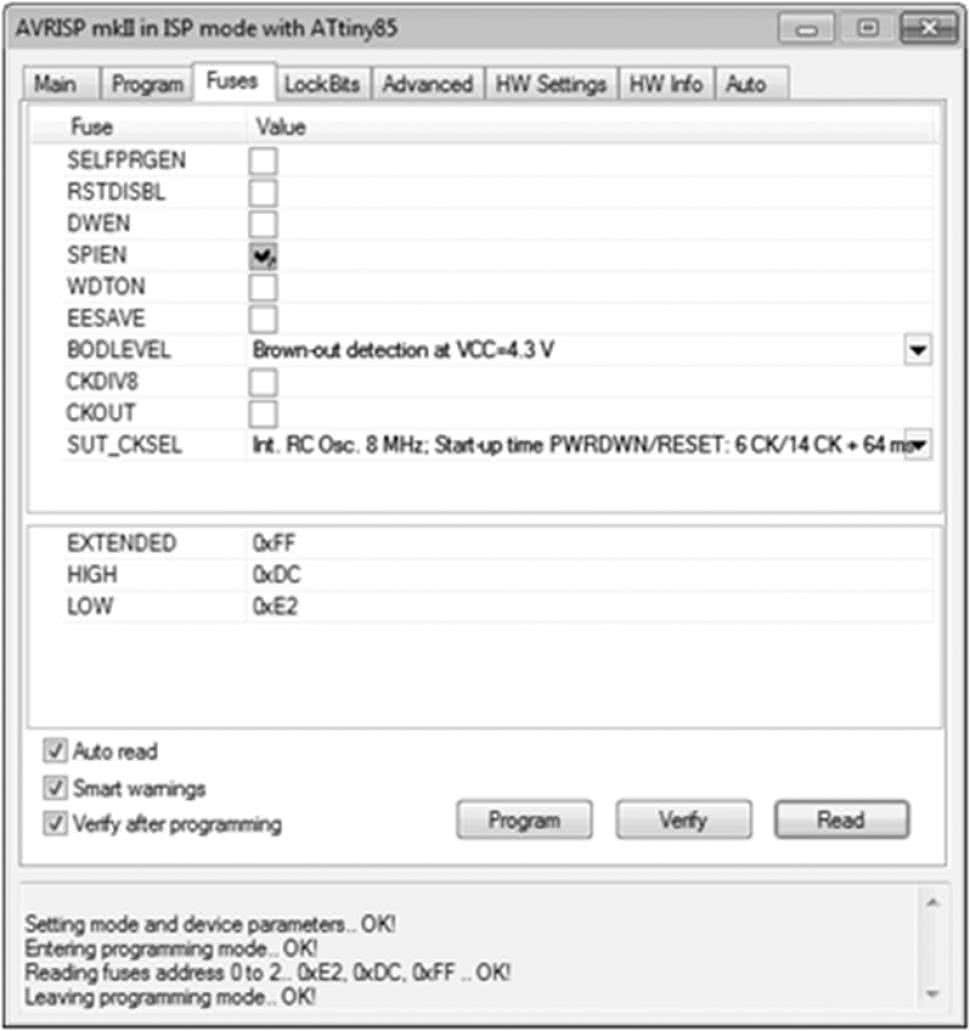
- FUSE BITS zgodnie z rysunkiem 7.
Montaż falownika
Urządzenie zmontowano na dwóch jednostronnych płytkach drukowanych.

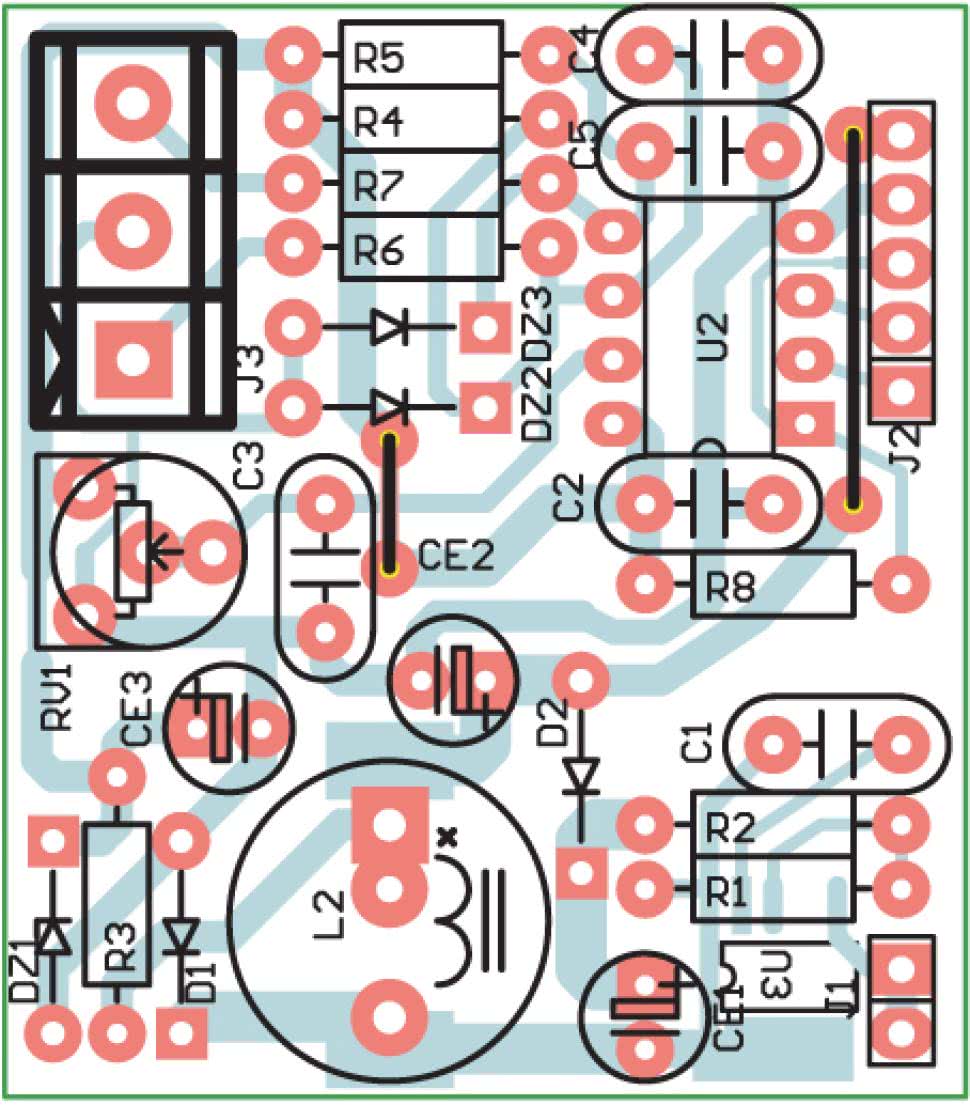
Schemat montażowy płytki mocy pokazano na rysunku 8, a płytki sterującej na rysunku 9. Montaż nie wymaga szerszego opisu, należy jednak pamiętać o staranności lutowania, a ze względu na wysokie napięcia występujące w układzie, należy mieć na uwadze bezpieczeństwo użytkownika.
W wypadku, gdy zajdzie potrzeba wyprowadzenia potencjometru poza płytką należy zachować szczególną ostrożność i zastosować potencjometr z osią izolowaną. Całość układu przewidziana jest do montażu wewnątrz urządzenia. Jeśli zostanie zastosowana metalowa obudowa, to bezwzględnie należy ją połączyć trwale z przewodem ochronnym PE sieci zasilającej.
Uruchomienie falownika
Dla ułatwienia uruchamiania proponujemy nieco inną od standardowej kolejność montażu i uruchamianie układu blokami funkcjonalnymi. Warto pamiętać, że po załączeniu sieci na poprawki może być za późno, a nieprawidłowe działanie mikrokontrolera ma zwykle kosztowne następstwa. Dlatego warto sprawdzić przebiegi PWM na wyjściach procesora przed dołączeniem układów wykonawczych. Najłatwiej zrobić to za pomocą oscyloskopu, ale nawet w takim wypadku przyda się przyrząd pokazany na rysunku 10. Dzięki niemu można sprawdzić obecność przebiegów do kilkunastu herców oraz nieco oswoić się z obsługą falownika.
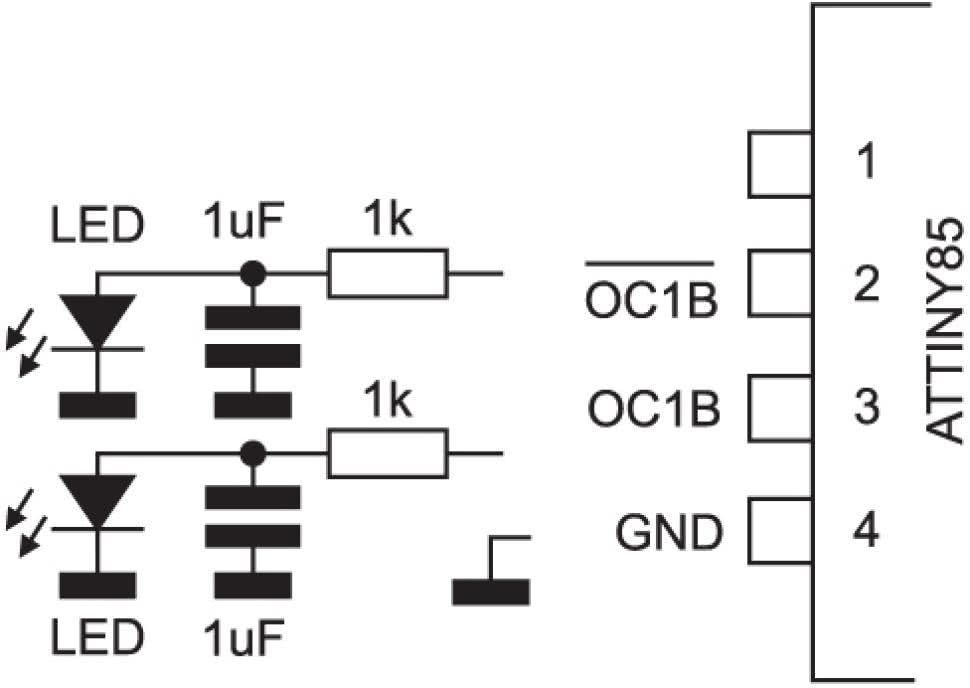
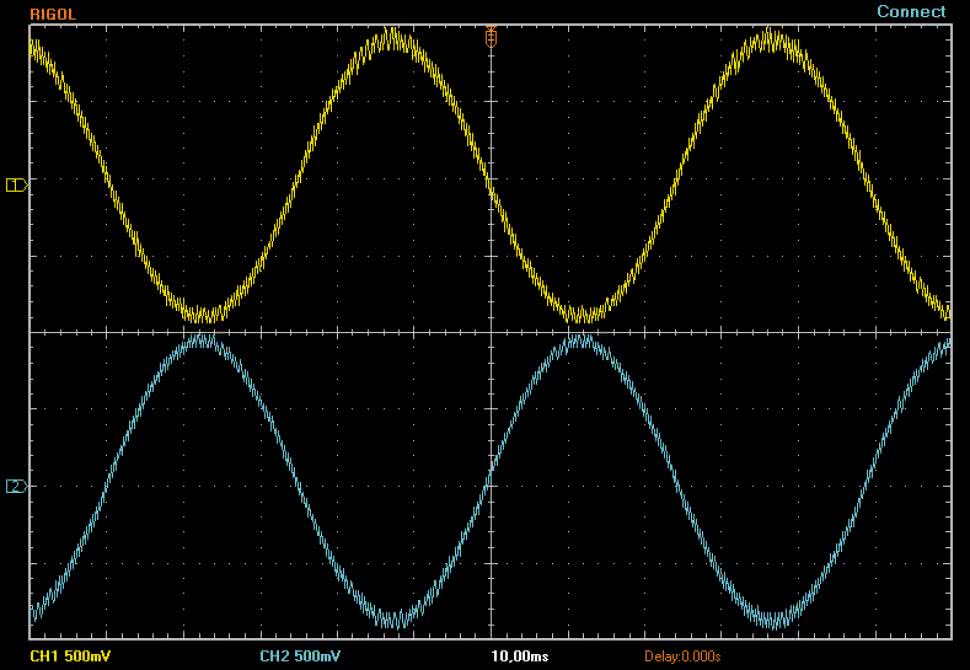
Uruchomienie rozpoczynamy od zmontowania płytki sterującej bez LNK304. Na czas prób mikrokontroler powinien być zasilany z zewnętrznego zasilacza o napięciu 5 V. Przy zamkniętych obu zworkach i potencjometrze ustawionym w pobliżu minimum (ale nie na 0, bo tam zmiany jasności są niezauważalne) diody LED powinny naprzemiennie rozjaśniać się i gasnąć kilka razy na sekundę. Zwiększanie „obrotów” powinno skutkować częstszym i bardziej wyraźnym miganiem diod. Otwarcie zworki „RUN/STOP” musi spowodować stopniowe zwolnienie błysków, a następnie zgaszenie obu LED. Po dołączeniu sond oscyloskopu do kondensatorów powinniśmy zobaczyć na ekranie dwa przebiegi o przeciwnych fazach i kształcie zbliżonym do pokazanego na rysunku 11.
Jeżeli wszystko zachowuje się prawidłowo można przetestować zasilacz niskiego napięcia. Montujemy wstępnie płytkę mocy bez tranzystorów mocy oraz driverów IR2184. Uruchomiony wcześniej sterownik można wlutować do płytki mocy. Do złącza J1 płytki mocy doprowadzamy napięcie najlepiej z autotransformatora z separacją i powoli podnosząc je do wartości ok. 80 V obserwujemy pracę się zasilacza. Przy ok. 80 V układ LNK304 powinien rozpocząć pracę i w układzie pojawią się napięcia 12 V i 5 V. Jeśli tak jest, to można wyłączyć zasilanie, odczekać na rozładowanie się kondensatora CE1 i wlutować brakujące elementy.
Dla ułatwienia montażu każdy z tranzystorów mocy jest zamontowany na osobnym radiatorze. Dzięki temu można zrezygnować z tulejek i podkładek izolujących. Nie należy jednak rezygnować z pasty silikonowej zmniejszającej rezystancję cieplną między radiatorem i obudową elementów mocy. Jeżeli falownik ma pracować dłuższy czas z większym obciążeniem, warto zastosować radiatory o większej wysokości lub wymusić przepływ powietrza małym wentylatorkiem.
Uwaga! Potencjometr, zwory, radiatory i cała reszta układu jest galwanicznie połączona z siecią energetyczną. Ostateczne uruchomienie odbywa się przy zasilaniu z sieci i podłączonym silniku. Dlatego należy zachować szczególną ostrożność. Jeżeli wcześniejsze kroki przebiegły bez problemów, układ jest gotowy do pracy.
Tomasz Gumny, EP
Adam Tatuś, EP
- R1: 2 kΩ
- R2, R4, R5, R8: 12 kΩ
- R3, R6, R7: 330 Ω
- RV1: 47 kΩ (potencjometr montażowy, leżący)
- C1…C5: 0,1 μF
- CE1: 10 μF/35 V
- CE2: 100 μF/16 V
- CE3: 10 μF/16 V
- D1, D2: UF4005 (dioda szybka)
- DZ1: dioda Zenera 5,1 V
- DZ2, DZ3: dioda Transil 6,8 V
- U2: ATtiny85 (DIP8)
- U3: LNK304D (SO8C)
- J1: SIP2 (złącze szpilkowe SIL 2,54 mm)
- J2: SIP5 (złącze szpilkowe SIL 2,54 mm)
- J3: złącze ARK (5,08 mm)
- L2: dławik 1 mH/280 mA, 60 kHz
- R1…R4: 22 Ω
- R5: 0,22 Ω/2W
- R6: 330 Ω
- R8: 1 MΩ/1 W
- C1, C2: 0,33 μF/275 V AC (X2)
- C3…C6: 0,1 μF
- C7: 1 nF
- CE1: 220 μF/400 V
- BR2: mostek prostowniczy KBL06
- D1, D2: dioda szybka UF4005
- Q1…Q4: STP4NK60Z (TO-220)
- Q5: BC547 (TO-92)
- U1, U2: IR2184 (DIP8)
- F1: bezpiecznik zwłoczny 2 A z oprawką (5 mm×20 mm)
- HS1…HS4: radiator HS135 (wys.=38 mm)
- J1, J2: złącze ARK (5,08 mm)
- J3: SIP5 złącze szpilkowe SIL=2,54 mm
- J4: SIP2 złącze szpilkowe SIL 2,54 mm
- L1: 2×39 mH/2 A (dławik skompensowany)