 Zaloguj
Zaloguj




- obrazuje poziom sygnału na dwóch linijkach, z których każda składa się z 20 diod LED,
- 3 tryby wyświetlania: wskaźnik punktowy, wskaźnik liniowy (bargraph), wskaźnik liniowy (bargraph) z pamięcią wartości szczytowych,
- maksymalne napięcie wejściowe (RMS): 1,4 V,
- poziomy odniesienia dla poszczególnych diod LED w przypadku skali domyślnej (dBu): -32, -30, -28, -26, -24, -22, -20, -18, -16, -14, -12, -10, -8, -6, -4, -2, 0, 1, 3, 5,
- zasilanie: 8…10 V, 170 mA.
Dzisiaj, gdy wszystko jest na wyciągnięcie ręki, możemy przebierać w dostępnych rozwiązaniach układowych i mimo, że mamy czasy wszechobecnej techniki cyfrowej, to nadal można zakupić wiele analogowych układów wskaźników wysterowania różnej maści (w tym dość egzotycznych układów z Azji).
Niemniej jednak implementacja analogowego wskaźnika tego typu nie jest żadnym wyzwaniem, gdyż aplikacje takich układów są niezmiernie proste i nie pozostawiają płaszczyzny do własnej inwencji a na dodatek mają z góry ustaloną funkcjonalność. Właśnie stąd wziął się pomysł na skonstruowanie własnej wersji tego typu urządzenia o rozszerzonej funkcjonalności i możliwości dostosowania do własnych potrzeb.
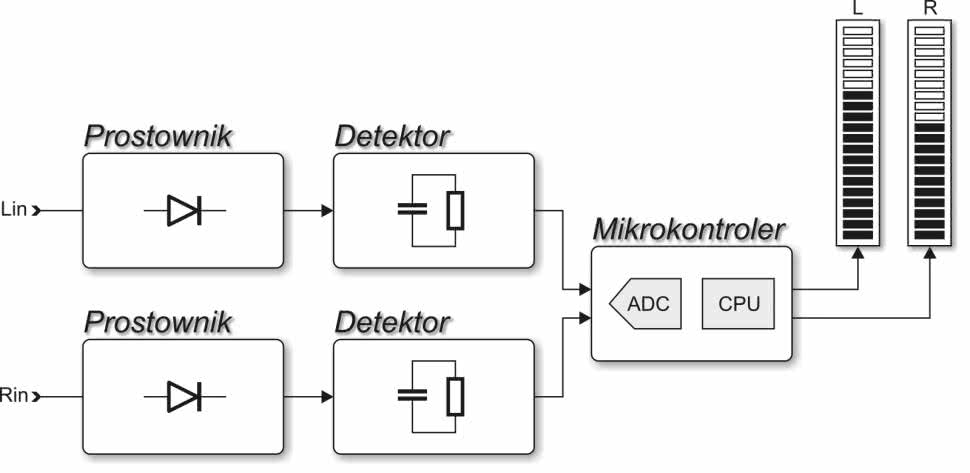
Zastanówmy się na początek, jak zbudowane powinno być takie urządzenie. Na pewno niezbędny jest jakiś obwód wejściowy przygotowujący sygnał audio do digitalizacji, następnie przetwornik ADC a na końcu mikrokontroler i wyświetlacz. Idea wydaje się prosta. Schemat blokowy urządzenia VUM pokazano na rysunku 1.
Poziomy sygnałów audio i stosowne skale
Zanim przejdę do szczegółowych rozwiązań układowych, kilka niezbędnych słów na temat poziomów sygnałów audio i stosownych skal. Niestety nie mam dobrych wieści. Stosowane są różne skale, dla których przewidziano różne sygnały odniesienia. I tak, mamy poziomy wyrażone w dB, w dBu, w dBV, dBFS (domena urządzeń cyfrowych) i wreszcie VU (skala analogowych mierników wysterowania nazywanych wolumetrami, które po raz pierwszy skonstruowano w USA w 1940 roku).
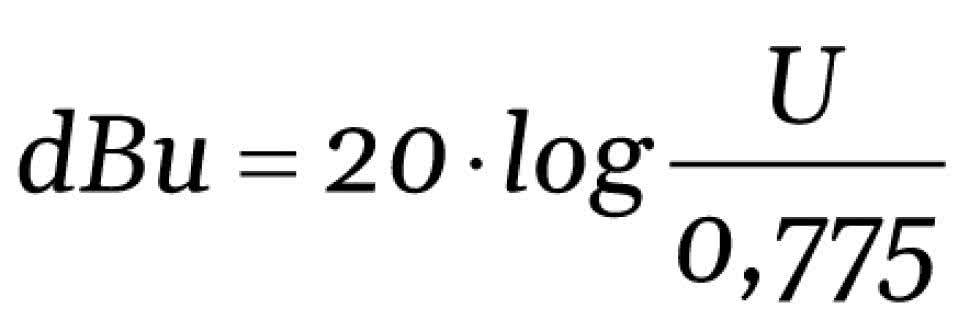
O ile pierwsze 4 są ściśle zdefiniowane i można je obliczyć (w wartościach skutecznych napięcia), o tyle skala VU (Volume Unit) ma różne poziomy odniesienia w zależności od standardu, rozgłośni czy kraju. Jedyne, co można o niej powiedzieć z całą pewnością, to to, że rozciąga się od -20 do +3, podczas gdy wartości -20 odpowiada 0%, zaś 0 odpowiada 100% (gdyż wartości procentowe także znajdują się na tej skali). Zwykle wartości 0 odpowiada sygnał o amplitudzie +4 dBu, lecz nie należy zbytnio przywiązywać się do tej wielkości, gdyż jak wspomniałem, występują znaczące różnice w interpretacji tych wartości. Już teraz powiem, że z tego właśnie powodu w naszym urządzeniu zdecydowałem się na skalę dBu (od -32 dB do +5 dB), jako powszechnie używaną w sprzęcie profesjonalnym (przynajmniej starej daty). Dla tej skali poziom 0 dB odpowiada napięciu skutecznemu o wartości 0,775 V, zaś same obliczenia wykonujemy według poniższego wzoru:
Budowa i działanie
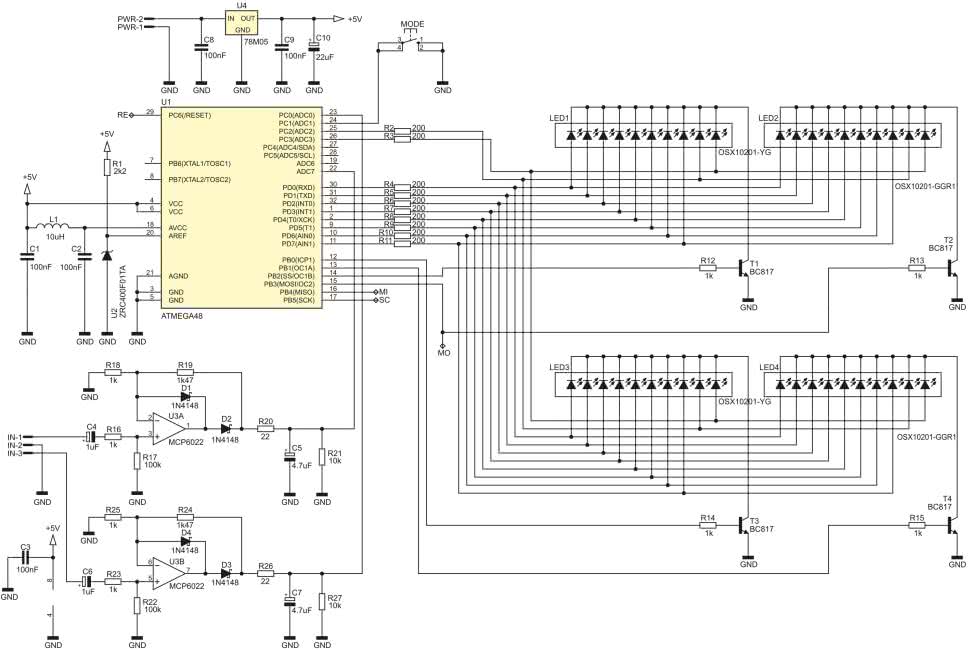
Tyle tytułem wstępu. Przejdźmy zatem do schematu naszego urządzenia, który pokazano na rysunku 2. Jak widać, zaprojektowano bardzo prosty system mikroprocesorowy, którego sercem jest niewielki mikrokontroler firmy Microchip (dawniej Atmel) pod postacią układu ATmega48 taktowany wewnętrznym sygnałem zegarowym o częstotliwości 1 MHz realizujący całą, założoną funkcjonalność urządzenia.
Wybór tego konkretnego układu z szerokiej palety układów firmy Microchip wynikał wyłącznie z potrzeby zastosowania elementu o dużej liczbie wyprowadzeń wyposażonego w przetwornik ADC. Ilość pamięci Flash czy RAM nie miała większego znaczenia, gdyż program obsługi aplikacji naszego urządzenia jest niezmiernie prosty i wykorzystuje ułamek dostępnych możliwości. Mikrokontroler steruje akwizycją danych wbudowanego 10-bitowego przetwornika ADC (tylko 10 razy na sekundę), przetwarza zmierzone wartości i na końcu wyświetla je na dwóch linijkach diodowych (oddzielnie dla lewego i prawego kanału), z których każda składa się z 20 diod LED (zbudowanych z dwóch elementów elektronicznych).
Ponieważ mamy do wysterowania aż 40 diod LED, zastosowano dobrze znane rozwiązanie multipleksowania wyświetlanej informacji, gdzie każda z 4 scalonych linijek LED (złożona z 10 diod) sterowana jest 60 razy na sekundę, niwelując zjawisko migotania. W takim rozwiązaniu redukujemy liczbę niezbędnych wyprowadzeń mikrokontrolera z 40 do zaledwie 14 (10 wspólnych anod i 4 wspólnych katod) a samo sterowanie odbywa się w sposób automatyczny (w tle) dzięki wykorzystaniu procedury obsługi przerwania Timera0. Jest to standardowe i bardzo wygodne rozwiązanie tego rodzaju zagadnień.
Ostatnim elementem obsługiwanym przez nasz mikrokontroler jest przycisk MODE, za pomocą którego wybieramy tryb wyświetlania informacji o poziomie sygnału spośród następujących:
- wskaźnik punktowy,
- wskaźnik liniowy (bargraph),
- wskaźnik liniowy (bargraph) z pamięcią wartości szczytowych.
Wybrane ustawienie zapamiętywane jest w nieulotnej pamięci EEPROM mikrokontrolera i staje się aktywne po włączeniu zasilania.
Warto również zaznaczyć, że przetwornik ADC wbudowany w strukturę mikrokontrolera korzysta z zewnętrznego, scalonego źródła napięcia odniesienia (4,096 V) pod postacią układu ZRC400F01TA, dzięki czemu osiągnięto szeroki zakres przetwarzanych napięć sygnału audio i dużą dokładność.
Skoro mowa o sygnale audio, to warto w skrócie opisać wejściowy obwód kondycjonujący (identycznego dla każdego z kanałów audio), który jest niezbędny z uwagi na charakter szybkozmiennych sygnałów audio. Jak widać, wejściowy sygnał audio trafia na wejście dość nietypowego prostownika jednopołówkowego zbudowanego z wykorzystaniem wzmacniacza operacyjnego (koniecznie typu rail-to-rail input/output) pracującego w konfiguracji nieodwracającej (ze wzmocnieniem równym około 2,47) i zasilanego napięciem niesymetrycznym. Dlaczego napisałem, iż aplikacja wspomnianego prostownika jest dość nietypowa? Wyłącznie z uwagi na fakt, że książkowe układy prostowników operacyjnych korzystają praktycznie zawsze z konfiguracji odwracającej i zasilania symetrycznego, którego chciałem w naszej implementacji uniknąć.
Abstrahując nawet od tego, uważny Czytelnik zauważy z pewnością, iż nawet bez obecności diody na wyjściu wzmacniacza operacyjnego (D3 dla prawego kanału) układ taki i tak pełniłby funkcję prostownika, gdyż wzmacniacz operacyjny zasilany wyłącznie napięciem dodatnim nie przepuści sygnałów o amplitudach ujemnych. Tak, to prawda, ale dioda D3 (jak i D4) ogrywa w tej implementacji inną rolę. Zauważmy, iż na wyjściu prostownika (katoda diody D3) znajduje się prosty układ RC pełniący zarówno funkcję układu całkującego, jak i detektora wartości szczytowej, który dostarcza na wejście przetwornika ADC wbudowanego w strukturę mikrokontrolera w zasadzie napięcie stałe, którego amplituda jest proporcjonalna do chwilowego napięcia szczytowego przebiegu audio. Stałe czasowe tego układu dobrano w taki sposób, by ładowanie kondensatora C7 sygnałem z prostownika przebiegało niemalże natychmiastowo (przez rezystor R26), zaś rozładowanie (przy każdym spadku sygnału wyjściowego prostownika) następowało o kilka rzędów wielkości wolniej (przez rezystor R27 i R24). Dioda D3 w tym układzie zapobiega rozładowaniu kondensatora wygładzającego C7 przez rezystancję wyjściową wzmacniacza operacyjnego podczas ujemnego półokresu sygnału wejściowego, zaś D4 zapewnia dodatkową ścieżkę rozładowania dla tegoż kondensatora. Jako że wspomniane stałe czasowe są znacząco różne, osiągnięto całkiem rzeczywisty efekt odpowiedzi układu na zmianę napięcia wejściowego sygnału audio symulującą ruchy wskazówki analogowego miernika VU. Zachowanie to możemy modyfikować poprzez zmianę wartości elementów integratora-detektora wartości szczytowej, a więc elementów R26, R27 i C7 (i odpowiednio R20, R21, C5 dla kanału lewego). Należy jednak pamiętać aby rezystor R26 (i odpowiednio R20) miał dużo mniejszą rezystancję niż R27 (i odpowiednio R21).
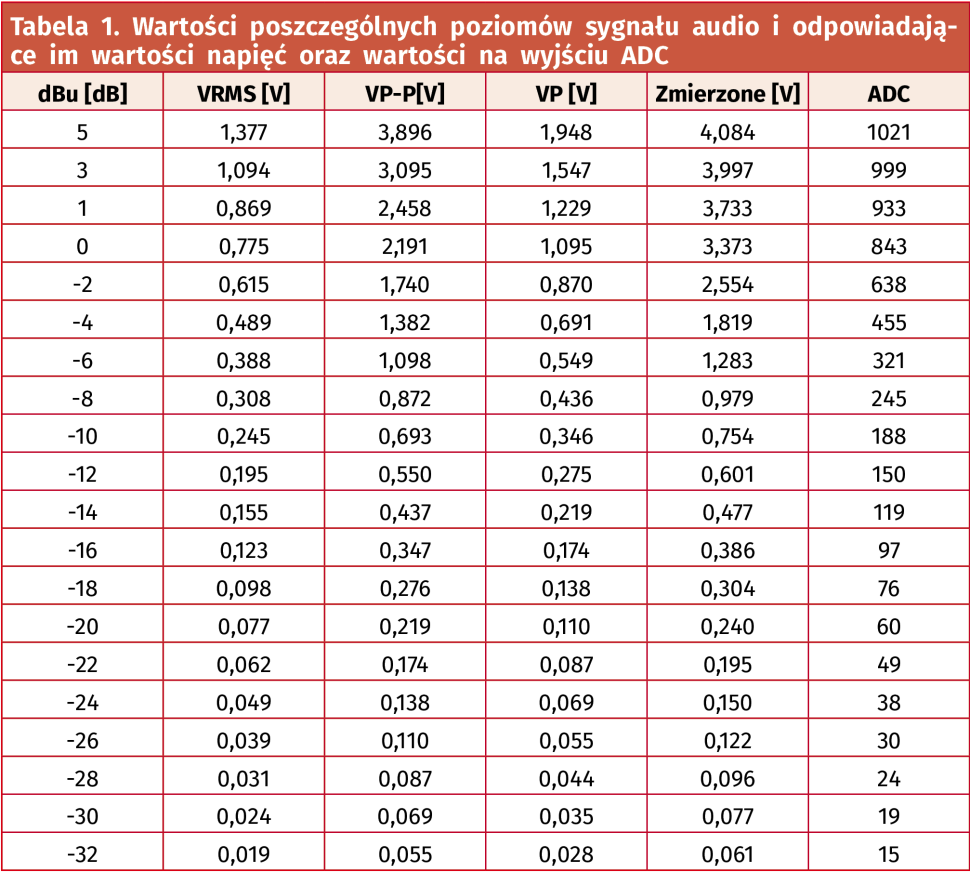
Wzmocnienie układu ustalają z kolei rezystory R25/R24 (i odpowiednio R18/R19) i tak jak wspomniano wcześniej, w naszym układzie wynosi ono około 2,47, a wynika z chęci dopasowania maksymalnej amplitudy wejściowego sygnału audio (+5 dBu, czyli ok. 3,9 Vp-p) do zakresu przetwarzania wbudowanego przetwornika ADC (4,096 V). Dla porządku, w tabeli 1 umieściłem wartości poszczególnych poziomów sygnału audio i odpowiadające im obliczeniowe wartości napięć skutecznych (RMS), międzyszczytowych (peak-to-peak), amplitudy, wartości przetwarzania przetwornika ADC oraz rzeczywiste wartości pomiarowe z wyjścia detektora wartości szczytowej zmierzone multimetrem dla wejściowego sygnału sinusoidalnego o częstotliwości 1 kHz (i odpowiedniej amplitudzie).
Zagadnienia programistyczne
Tyle w kwestii budowy urządzenia VUM. Przejdźmy zatem do kilku drobnych zagadnień programistycznych. Na początek mechanizm multipleksowania, którego prezentację rozpoczniemy od pokazania pliku nagłówkowego upraszczającego dostęp do zasobów mikrokontrolera i porządkującego kod aplikacji w tym zakresie. Mam świadomość, że nie jest to żadne "rocket science", ale chciałem Wam pokazać, jak w efektywny i efektowny sposób "ogarnąć" tego rodzaju zagadnienie programistyczne, czyniąc sam proces programowania niezmiernie przyjemnym. Nieskromnie powiem, że w moim przekonaniu właśnie w ten przejrzysty sposób powinno się konstruować moduły obsługi danych peryferiów, gdyż jakakolwiek modyfikacja sprowadza się wtedy do kosmetycznych i prostych do wykonania zmian.
Kod pliku nagłówkowego mechanizmu multipleksowania pokazano na listingu 1.
#define COM_ANODE_LOWER_PORT PORTD
#define COM_ANODE_LOWER_DDR DDRD
#define COM_ANODE_UPPER_PORT PORTC
#define COM_ANODE_UPPER_DDR DDRC
#define COM_ANODE_UPPER_LOW PC2
#define COM_ANODE_UPPER_HIGH PC3
#define COM_CAT_PORT PORTB
#define COM_CAT_DDR DDRB
#define COM_CAT_LEFT_LOWER PB2
#define COM_CAT_LEFT_UPPER PB3
#define COM_CAT_RIGHT_LOWER PB0
#define COM_CAT_RIGHT_UPPER PB1
#define COM_CAT_BLANK COM_CAT_PORT &=
~((1<<COM_CAT_LEFT_LOWER)
|(1<<COM_CAT_LEFT_UPPER)
|(1<<COM_CAT_RIGHT_LOWER)
|(1<<COM_CAT_RIGHT_UPPER))
#define LEFT_LED 0x00
#define RIGHT_LED 0x01
//Zmienna przechowująca wartość
//wyświetlaną na obu linijkach LED
extern volatile uint32_t Led[2];
//Zezwolenie na aktualizację zmiennych Led[]
extern volatile uint8_t readyForUpdate;
Jak widać, wprowadzono dwie zmienne globalne typu volatile: Led[2] i readyFor Update. Pierwsza z nich (tablica) przechowuje wartości (a w zasadzie wzór) przeznaczone do wyświetlenia na każdej z linijek LED (używanych jest 20 bitów w każdej z nich), zaś druga to flaga pozwalająca programowi głównemu na aktualizację właśnie tej zmiennej - Led[]. Potrzeba wprowadzenia drugiej zmiennej wynikała z konieczności synchronizacji chwili aktualizacji zmiennej Led[] z pracą funkcji multipleksującej linijki LED, tak by nie występowało zjawisko mieszania zawartości zmiennej Led[] wartościami z różnych pomiarów dokonywanych przecież w pętli głównej programu aplikacji, zwłaszcza że każdy element tej zmiennej jest 32-bitowy (zajmuje 4 bajty pamięci). Aktualizacja tej zmiennej następuje po pełnym cyklu multipleksu dla całego wyświetlacza LED.
void initMultiplex(void){
//Porty wspólnych anod, jako porty wyjściowe ze stanem nieaktywnym “0”
COM_ANODE_LOWER_DDR = 0xFF;
COM_ANODE_UPPER_DDR |= (1<<COM_ANODE_UPPER_LOW)
|(1<<COM_ANODE_UPPER_HIGH);
//Port wspólnych katod, jako port wyjściowy ze stanem nieaktywnym “0”
COM_CAT_DDR |= (1<<COM_CAT_LEFT_LOWER)
|(1<<COM_CAT_LEFT_UPPER)
|(1<<COM_CAT_RIGHT_LOWER)
|(1<<COM_CAT_RIGHT_UPPER);
//Konfiguracja licznika Timer0 w celu generowania przerwania
//do obsługi multipleksowania linijek LED (240 Hz)
TCCR0A = (1<<WGM01); //Tryb CTC
TCCR0B = (1<<CS02); //Preskaler = 256 @ 1MHz
//240 Hz (przerwanie 240 razy na sekundę,
//60 razy na sekundę dla każdej linijki LED)
OCR0A = 15;
//Uruchomienie przerwania Output Compare Match A (od porównania)
TIMSK0 = (1<<OCIE0A);
}
Dalej na listingu 2 pokazano kod funkcji inicjującej mechanizm multipleksowania, zaś na listingu 3 kod funkcji obsługi przerwania od Timer0, który odpowiada za mechanizm multipleksowania.
ISR(TIMER0_COMPA_vect){
static uint8_t Nr; //Numer kolejnej linijki do wyświetlenia
uint16_t Value = 0; //Optymalizacja dostępu volatile
readyForUpdate = 0;
//Wybranie odpowiedniej wartości do pokazania
switch(Nr){
case 0: Value = Led[LEFT_LED]; break;
case 1: Value = Led[LEFT_LED] >> 10; break;
case 2: Value = Led[RIGHT_LED]; break;
case 3: Value = Led[RIGHT_LED] >> 10; break;
}
//Wygaszenie wspólnych katod
COM_CAT_BLANK;
//Wystawienie właściwych stanów na portach wspólnych anod
COM_ANODE_LOWER_PORT = Value & 0xFF;
if(Value & 0b100000000)
COM_ANODE_UPPER_PORT |= (1<<COM_ANODE_UPPER_LOW);
else COM_ANODE_UPPER_PORT &= ~(1<<COM_ANODE_UPPER_LOW);
if(Value & 0b1000000000)
COM_ANODE_UPPER_PORT |= (1<<COM_ANODE_UPPER_HIGH);
else COM_ANODE_UPPER_PORT &= ~(1<<COM_ANODE_UPPER_HIGH);
//Załączenie odpowiedniej wspólnej katody
COM_CAT_PORT |= pgm_read_byte(&comCat[Nr]);
//Wybranie kolejnej linijki LED
Nr = (Nr+1) & 0x03;
//Zezwolenie na aktualizację zmiennych Led[] w pętli głównej
if(Nr == 0) readyForUpdate = 1;
}
Prawda, że proste? Przejdźmy zatem do dwóch funkcji obsługi przetwornika ADC, których prezentację rozpoczniemy od funkcji inicjalizacyjnej, której wyłącznym zadaniem jest przygotowanie zmiennych używanych w docelowej funkcji pomiarowej. Ciało wspomnianej funkcji (wraz z definicją niezbędnych zmiennych) pokazano na listingu 4. Jak widać, funkcja powyższa korzysta z predefiniowanej (w pamięci Flash) tablicy dBuDefault[] przechowującej wartości przetwarzania przetwornika ADC dla kolejnych poziomów wejściowego sygnału audio (w skali dBu) lub podobnej tablicy dBUser[] (tyle że w pamięci EEPROM) przechowującej wartości przetwarzania przetwornika ADC dla kolejnych poziomów wejściowego sygnału audio zdefiniowanych przez użytkownika. Dzięki temu prostemu zabiegowi użytkownik urządzenia ma możliwość (poprzez zaprogramowanie wyłącznie pamięci EEPROM mikrokontrolera) zdefiniowania własnych wartości przetwornika ADC, dla których następuje zapalenie kolejnych diod LED linijki świetlnej.
//Zmienna przechowująca domyślne (we Flash)
//wartości ADC dla kolejnych poziomów dBu: od -36dB do 5dB
const uint16_t dBuDefault[22] PROGMEM = {
0, 15, 19, 24, 30, 38, 49, 60, 76, 97, 119,
150, 188, 245, 321, 455, 638, 843, 933,
999, 1021, 1024};
//Zmienna przechowująca wartości ADC
//dla kolejnych poziomów dBu zdefiniowanych przez użytkownika
uint16_t dBUser[22] EEMEM;
//Zmienna przechowująca wynikowe wartości ADC
//dla kolejnych poziomów dBu
uint16_t dB[22];
//Wskaźnik rodzaju skali: AA -> skala użytkownika
const uint8_t ScaleEE EEMEM;
//Funkcja odczytuje do tablicy dB[22] wynikowe wartości progowe
//w zależności od skali: predefiniowanej czy użytkownika
void initADC(void){
//Sprawdzamy jakiego rodzaju skali należy używać:
//predefiniowanej (dBu) czy użytkownika
//mówi o tym zmienna EEPROM ScaleEE
if(eeprom_read_byte(&ScaleEE) == 0xAA){
for(uint8_t i = 0; i <22; i++)
dB[i] = eeprom_read_word(&dBUser[i]);
}else{
for(uint8_t i = 0; i <22; i++)
dB[i] = pgm_read_word(&dBuDefault[i]);
}
}
Wybór konkretnej skali zdeterminowany jest wartością zmiennej ScaleEE umieszczonej pod adresem 0x00 we wspomnianej pamięci EEPROM. Jeśli jest ona równa 0xAA, zostanie wybrana skala użytkownika, w przeciwnym razie zastosowana zostanie skala domyślna dBu. W wyniku działania powyższej funkcji wartości skali wynikowej kopiowane są do zmiennej dB[] umieszczonej w pamięci RAM mikrokontrolera, co w założeniach ma przyspieszyć wykonywanie funkcji pomiarowej pokazanej później (gdyż odczyt z pamięci EEPROM jest co najmniej rząd wielkości wolniejszy niż analogiczny odczyt z pamięci RAM).
W przypadku skali użytkownika kolejne komórki pamięci EEPROM (począwszy od adresu 0x01 a skończywszy na 0x2C) powinny wtedy zawierać kolejne słowa tablicy dBUser[] (22 słowa 16-bitowe, bajt LSB jako pierwszy), przy czym pierwszy element tej tablicy (dBUser[0]) powinien zawierać wartość 0, zaś ostatni (dBUser[21]) wartość 1024. Wszystkie pośrednie powinny zawierać wartości przetwarzania przetwornika ADC (od najmniejszych do największych), przy których następuje zaświecenie kolejnej diody LED (1 do 20). Wartości te obliczamy według wzoru:
gdzie
- U - wartość napięcia [V] na wyjściu detektora wartości szczytowej.
Oczywiście w takim przypadku domyślna skala wydrukowana na płytce drukowanej nie ma wtedy zastosowania.
Przejdźmy zatem do implementacji funkcji odpowiedzialnej za wykonywanie pomiarów przy udziale wbudowanego przetwornika ADC, której ciało pokazano na listingu 5.
//Funkcja zwraca 0...20, czyli liczbę diod LED do zapalenia w słupku
uint8_t readADC(uint8_t Channel){
uint16_t Voltage = 0;
uint8_t Level;
//Vref = AREF (default), internal Vref turned off
ADMUX = Channel;
//Wykonujemy 8 pomiarów by uśrednić wartość wynikową
for(uint8_t i=0; i<8; i++){
//Uruchomienie konwersji
//Preskaler=8 (125kHz @ 1MHz)
ADCSRA = (1<<ADEN)|(1<<ADSC)
|(1<<ADPS1)|(1<<ADPS0);
//Czekamy na zakończenie bieżącej konwersji - 120us
while(ADCSRA & (1<<ADSC));
Voltage += ADC;
}
Voltage /= 8;
//Konwertujemy odczytaną wartość ADC do wartości wynikowej: 0...20
for(Level = 0; Level <21; Level++)
if(Voltage >= dB[Level] && Voltage < dB[Level+1]) break;
return Level;
}
W wyniku swojego działania funkcja zwraca wartość z zakresu 0…20 odpowiadającą wskazaniu (w dBu lub poziomach użytkownika) kolejnej diody LED na linijce świetlnej każdego z kanałów. Wartość ta jest przetwarzana w pętli głównej aplikacji na stosowny wzór (zmienna Led[]) przeznaczony do wyświetlenia na tejże linijce, zaś jego implementacja zależna jest od wybranego trybu wyświetlania. Za tę część programu obsługi aplikacji odpowiada kod pokazany na listingu 6. To byłoby tyle, jeśli chodzi o zagadnienia programistyczne, w związku z tym przejdźmy do szczegółów montażowych.
//Wykonujemy pomiary dla obu kanałów
Bar[0] = readADC(LEFT_CHANNEL);
Bar[1] = readADC(RIGHT_CHANNEL);
//Wartości obu pomiarów przeliczamy na wzór
//dla obu słupków LED, przy czym sposób przeliczenia
//zależy od bieżącego trybu pracy urządzenia:
//wyświetlanie pojedynczych pasków czy słupków
for(uint8_t i = 0; i < 2; i++){
switch(Mode){
case MODE_POINT:
//Rysujemy pojedyńczą linię dla każdego wyświetlacza LED
if(Bar[i] == 0)
localLed[i] = 0;
else localLed[i] = ((uint32_t) 1<<(Bar[i]-1));
break;
case MODE_BAR:
//Rysujemy słupki dla każdej linijki LED
localLed[i] = 0;
for(uint8_t Val = 1; Val<21; Val++)
if(Bar[i] >= Val)
localLed[i] |= ((uint32_t) 1<<(Val-1));
else break;
break;
case MODE_BAR_MAX:
//Aktualizujemy maksima
if(Bar[i] > maxBar[i]) maxBar[i] = Bar[i];
//Co 200 ms zmniejszamy maksima o jeden pasek w dół
if((++timer200ms%2) == 0) if(maxBar[i]) --maxBar[i];
//Rysujemy słupki dla każdej linijki LED plus pasek maximum
localLed[i] = 0;
for(uint8_t Val = 1; Val<21; Val++)
if(Bar[i] >= Val)
localLed[i] |= ((uint32_t) 1<<(Val-1));
else break;
//Dorysowanie paska maximum
if(maxBar[i])
localLed[i] |= ((uint32_t) 1<<(maxBar[i]-1));
break;
}
}
//Czekamy na zezwolenie na aktualizację zmiennych Led[]
//dla funkcji ISR multipleksowania
while(readyForUpdate != 1);
ATOMIC_BLOCK(ATOMIC_RESTORESTATE){
readyForUpdate = 0;
Led[0] = localLed[0];
Led[1] = localLed[1];
}
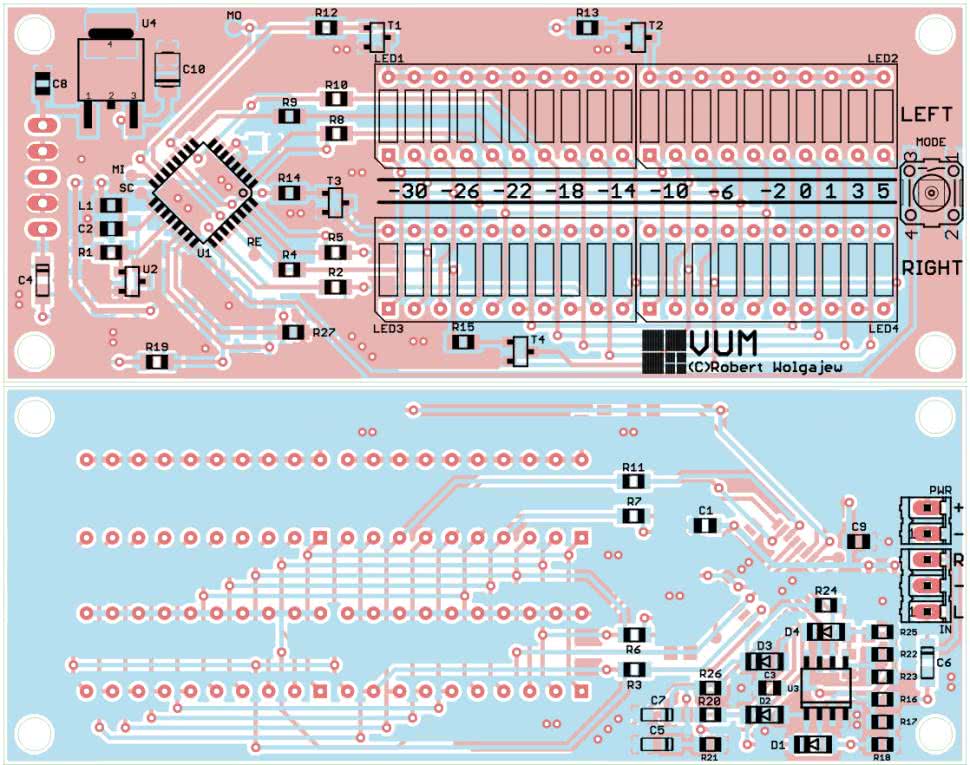
Montaż i uruchomienie
Schemat montażowy urządzenia VUM pokazano rysunku 3. Zaprojektowano niewielki, dwustronny obwód drukowany ze zdecydowaną przewagą elementów SMD montowanych po obu stronach laminatu (dla zmniejszenia wymiarów PCB). Montaż urządzenia rozpoczynamy od warstwy TOP, gdzie w pierwszej kolejności montujemy mikrokontroler sterujący. Najprostszym sposobem montażu elementu o takim zagęszczeniu wyprowadzeń, niewymagającym jednocześnie posiadania specjalistycznego sprzętu, jest użycie typowej stacji lutowniczej, dobrej jakości cyny z odpowiednią ilością topnika oraz dość cienkiej plecionki rozlutowniczej, która umożliwi usunięcie nadmiaru cyny spomiędzy wyprowadzeń złącza. Należy przy tym uważać, by nie uszkodzić termicznie tegoż elementu. Jakość tak wykonanego połączenia sprawdzamy pod lupą, korzystając z najprostszego miernika pozwalającego sprawdzić ciągłość połączeń.
Wspomniana kontrola będzie znacznie łatwiejsza, jeśli zmontowaną płytkę przemyjemy alkoholem izopropylowym w celu wypłukania nadmiaru kalafonii lutowniczej.
W kolejnym kroku montujemy pozostałe półprzewodniki, a na końcu elementy bierne. W tym momencie przechodzimy na warstwę BOTTOM, gdzie podobnie jak poprzednio, w pierwszej kolejności przylutowujemy półprzewodniki, zaś na końcu elementy bierne. Dalej, wracamy na warstwę TOP, gdzie przylutowujemy linijki LED oraz microswitch MODE. Ostatnim etapem montażu jest przylutowanie gniazd połączeniowych PWR i IN, co możemy wykonać zarówno od strony BOTTOM (preferowane z uwagi na późniejsze podłączenia) lub TOP w zależności od docelowego sposobu montażu urządzenia.
Poprawnie zmontowany układ nie wymaga żadnego specjalnego procesu uruchamiania i powinien działać tuż po podłączeniu zasilania. W przypadku monitorowania sygnałów audio o amplitudach przekraczających zakres napięć wejściowych urządzenia należy na wejściu zastosować prosty dzielnik napięcia w postaci potencjometru o rezystancji w granicach 50 kΩ lub też zmienić wzmocnienie wejściowego układu audio zbudowanego ze wzmacniaczy operacyjnych.
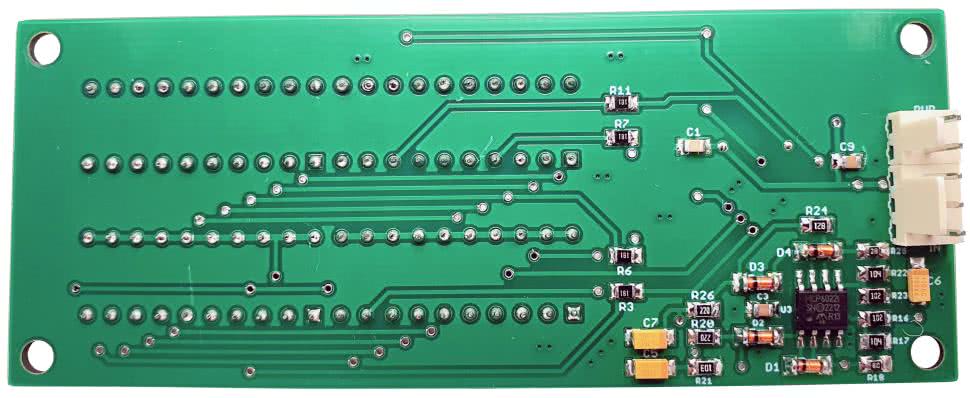
Na fotografii 1 pokazano zmontowane urządzenie VUM od strony warstwy BOTTOM, zaś to samo urządzenie od strony warstwy TOP na fotografii tytułowej.
CKSEL3...0: 0010
SUT1...0: 10
CKDIV8: 0
CKOUT: 1
DWEN: 1
EESAVE: 0
Robert Wołgajew, EP
- R1: 2.2 kΩ
- R2…R11: 200 Ω
- R12…R15, R16, R23: 1 kΩ
- R18, R25: 1 kΩ 1%
- R21, R27: 10 kΩ
- R17, R22: 100 kΩ
- R19, R24: 1,47 kΩ 1%
- R20, R26: 22 Ω
- C1, C2, C3, C8, C9: 100 nF ceramiczny X7R (SMD0805)
- C4, C6: 1 μF/10 V tantalowy (A/3216-18R)
- C5, C7: 4,7 μF/10 V tantalowy (A/3216-18R)
- C10: 22 μF/10 V tantalowy (B/3528-21W)
- LED1, LED3: linijka diodowa zielona typu OSX10201-YG
- LED2, LED4: linijka diodowa zielono-czerwona typu OSX10201-GGR1
- D1…D4: 1N4148 (miniMELF)
- T1…T4: BC817 (SOT23)
- U1: ATmega48 (TQFP32)
- U2: ZRC400F01TA (SOT23)
- U3: MCP6022 (SO08)
- U4: 78M05 (DPAK)
- L1: dławik 10 μH (SMD0805)
- IN: gniazdo męskie proste 3-pin (NSL25-3W)
- PWR: gniazdo męskie proste 2-pin (NSL25-2W)
- MODE: microswitch SMD typu DTSM-65N-V-B lub podobny












