 Zaloguj
Zaloguj



- monitorowanie napięcia na zaciskach akumulatora 12 V,
- załączanie zasilania zewnętrznej ładowarki przy spadku napięcia poniżej ustalonego progu,
- wyłączanie zasilania ładowarki po wzroście napięcia do ustalonej wartości lub spadku natężenia prądu ładowania,
- maksymalny prąd ładowania 5 A,
- minimalny prąd ładowania regulowany od 0 do 2,5 A,
- zasilanie napięciem stałym o wartości około 12 V (10,8…14,4 V),
- pobór prądu do 40 mA.
Proste ładowarki akumulatorów kwasowych nie mają żadnych układów odłączających ładowanie po jego zakończeniu. Trzeba w takiej sytuacji robić to samodzielnie lub ładować akumulator przez określony czas, co może wiązać się z jego przeładowaniem. W sytuacji, kiedy ładowanie ma odbywać się cyklicznie – na przykład co kilka dni – użytkownik może często zapominać o podłączeniu ładowarki.
Zaprezentowany układ samodzielnie monitoruje napięcie na zaciskach akumulatora i decyduje o tym, kiedy włączyć i kiedy wyłączyć ładowarkę. Jeżeli prąd ładowania spadnie poniżej ustalonego progu, układ również odetnie jej zasilanie, choć tę funkcję można łatwo wyłączyć.
Budowa i działanie
Schemat sterownika ładowarki został pokazany na rysunku 1. Ładowarkę podłącza się do złącza J1, a nadzorowany akumulator do złącza J2. Dioda D1 stanowi ochronę układu przed zniszczeniem w razie niewłaściwej polaryzacji zasilania oraz, co równie istotne, doładowuje kondensator C1. Napięcie z ładowarki, może mieć znaczne tętnienia, dlatego dioda i kondensator realizują skuteczny układ filtrujący.
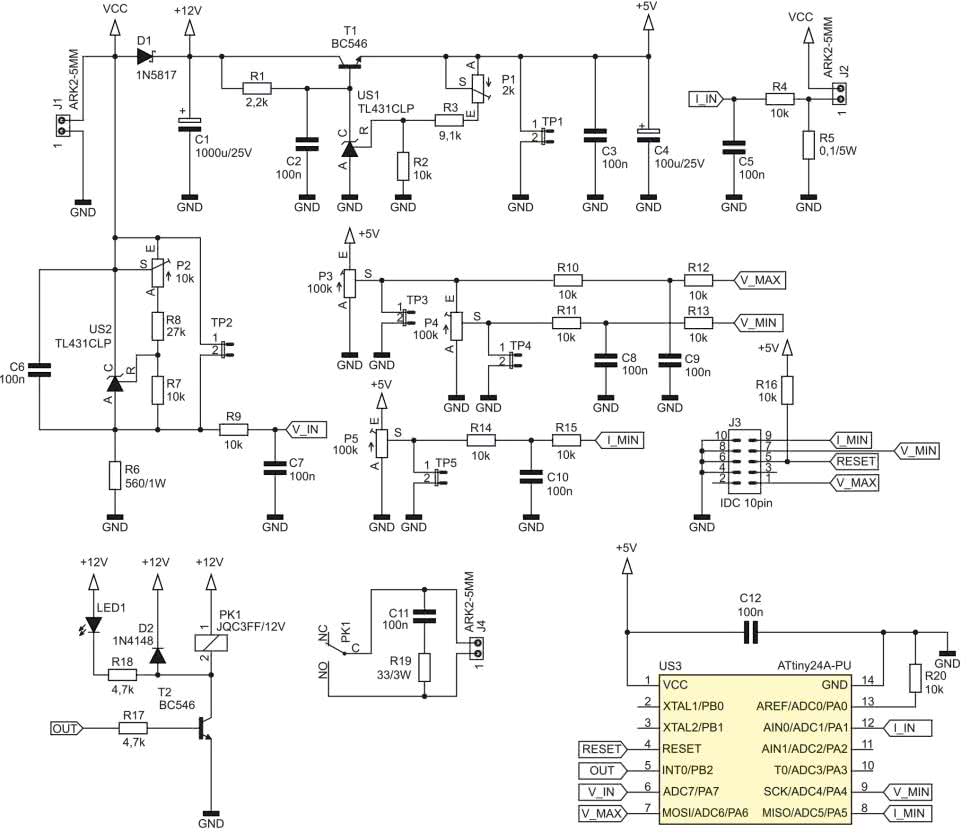
Niezmiernie istotne dla prawidłowego funkcjonowania układu jest zapewnienie stabilnego napięcia referencyjnego. Chcąc uprościć zadanie i uczynić urządzenie tańszym, w tej roli wystąpił znany układ typu TL431. Tranzystor T1 pracuje jako wtórnik napięciowy, zaś nad utrzymaniem napięcia wyjściowego czuwa US1. W jego pętli sprzężenia zwrotnego znajduje się dzielnik złożony z R2 oraz R3+P1. Aby uzyskać na wyjściu 5 V, rezystancje obu tych gałęzi powinny być, teoretycznie, jednakowe. Jednak w praktyce mamy do czynienia z rozrzutami parametrów wielu elementów, zatem wprowadzono możliwość dokładnej regulacji przy pomocy potencjometru P1.
Do zacisków TP1 można podłączyć woltomierz i ustawić wartość możliwie zbliżoną do pożądanej. Rezystor R1 polaryzuje układ US1 dostarczając prądu o natężeniu kilku miliamperów. Baza T1 nie będzie pobierała w tym układzie znacznego prądu, więc nie trzeba jej szczególnie uwzględniać. Kondensator C2 zapobiega wzbudzeniu układu US1.
Natężenie prądu płynącego przez akumulator z ładowarki jest mierzone metodą techniczną, poprzez pomiar spadku napięcia na rezystorze R5. Uzyskane w ten sposób napięcie zgrubnie filtruje się przez prosty obwód R4+C5. Napięcie na zaciskach akumulatora również musi być mierzone, co ułatwia obwód zawierający układ US2.
To przesuwnik poziomu napięcia, który ma za zadanie obniżyć aktualną wartość napięcia na zaciskach akumulatora o dokładnie 10 V, co można zmierzyć przykładając woltomierz do zacisków TP2. Aby wyregulować tę wartość, do układu został dodany potencjometr P2. W sytuacji idealnej, rezystancja gałęzi R8+P2 powinna być trzykrotnie wyższa niż samego rezystora R7. Rezystor R6 polaryzuje układ US2 prądem nie mniejszym niż 1 mA – to wymóg konieczny dla prawidłowego działania tego regulowanego źródła referencyjnego. Kondensator C6 zapobiega wzbudzeniu układu US2, a człon R9+C7 filtruje obniżone napięcie.
Skąd takie rozwiązanie? Przyjęto, że minimalne napięcie na zaciskach akumulatora może wynosić 10,8 V (zupełnie rozładowanie), a maksymalne około 14,4 V (pełne naładowanie). Zatem obniżenie go o 10 V spowoduje, że na wejście układu przetwarzającego te wartości trafi napięcie zmieniające się w granicach 0,8…4,4 V.
Zakładając napięcie referencyjne dla przetwornika analogowo-cyfrowego o wartości 5 V, możemy je zmierzyć z bardzo dobrą dokładnością.
W układzie znajdują się jeszcze inne potencjometry. Napięcie maksymalne – ustalane potencjometrem P3 – może wynosić o 10 V więcej niż to, które odkłada się między wyprowadzeniami TP3, czyli od 10 V do 15 V. Z kolei napięcie minimalne można regulować od 10 V do napięcia maksymalnego. To kaskadowe połączenie potencjometrów (P4 jest zasilany ze ślizgacza P3) pozwala na utrzymanie właściwego stosunku między tymi napięciami, czyli maksymalne będzie nie niższe od minimalnego. Zapobiegnie to omyłkowemu ustawieniu tych napięć w odwrotnej relacji, chociaż wymusza określoną kolejność regulacji – najpierw potencjometrem P3, a dopiero później P4.
Potencjometr P5 służy do ustawienia minimalnego prądu ładowania, przy którym opłaca się utrzymywać ładowarkę w stanie załączenia. Można w ten sposób uchronić akumulator przed rozkładem elektrolitu na wodór i tlen (gazowaniem) w sytuacji, gdyby długotrwale było na nim utrzymywane zawyżone napięcie. Zaciski TP5 służą do kontroli ustawionego napięcia, które z kolei przelicza się na prąd.
Napięcie ustalone potencjometrami również jest filtrowane prostymi układami RC, aby w jak największym stopniu oczyścić je z szumu i zakłóceń przed przetwarzaniem analogowo-cyfrowym. Ponieważ te same linie mikrokontrolera są używane przez interfejs programowania ISP, konieczne było dodanie rezystorów R12, R13 i R15. Bez nich, pojemność kondensatorów C8…C10 obciążałaby te wyprowadzenia, spowalniając zmiany napięcia na nich, co mogłoby uniemożliwić programowanie. W stanie ustalonym obecność tych rezystorów nie ma istotnego wpływu na działanie układu.
Zadaniem mikrokontrolera jest załączanie przekaźnika PK1, w czym pośredniczy tranzystor T2. Dioda LED1 sygnalizuje swoim świeceniem załączenie ładowarki, a jej zasilanie odbywa się wprost z napięcia akumulatora, aby nie obciążać niepotrzebnie układu stabilizującego napięcie referencyjne. Równolegle do styków przekaźnika został dodany prosty układ gaszący RC, który zmniejsza iskrzenie i emisję zakłóceń elektromagnetycznych, które mogłyby zablokować mikrokontroler.
Jak już wcześniej wspomniano, pracą sterownika zawiaduje mikrokontroler typu ATtiny24A. Ma on dostateczną liczbę wejść wbudowanego przetwornika analogowo-cyfrowego. Jego napięciem referencyjnym jest w tym układzie napięcie zasilania równe 5 V. Wyprowadzenie ADC0 zostało spolaryzowane potencjałem masy, ponieważ układ wykorzystuje wbudowany wzmacniacz różnicowy do wzmocnienia napięcia odkładającego się na rezystorze pomiarowym R5. Wzmocnienie wynosi 20 V/V i można go użyć wyłącznie w trybie różnicowym – stąd jego wejście odwracające (ADC0) zostało spolaryzowane potencjałem 0 V, zaś nieodwracające (ADC1) napięciem z rezystora R5. Płytka została tak zaprojektowana, że płaszczyzna masy na niej jest niemal ekwipotencjalna, toteż nie trzeba było podłączać wejścia ADC0 bezpośrednio przy R5.
Ponieważ nie mamy gwarancji, że wyprowadzenie PA0 (ADC0) nie przyjmie nawet przez chwilę wysokiego stanu logicznego, zostało zwarte z masą układu przez rezystor R20. Jego zadaniem jest ograniczenie płynącego prądu w tej niepożądanej sytuacji.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 90×60 mm. Jej schemat wraz z rozmieszczeniem elementów został pokazany na rysunku 2. W odległości 3 mm od krawędzi płytki znalazły się otwory montażowe o średnicy 3,2 mm.
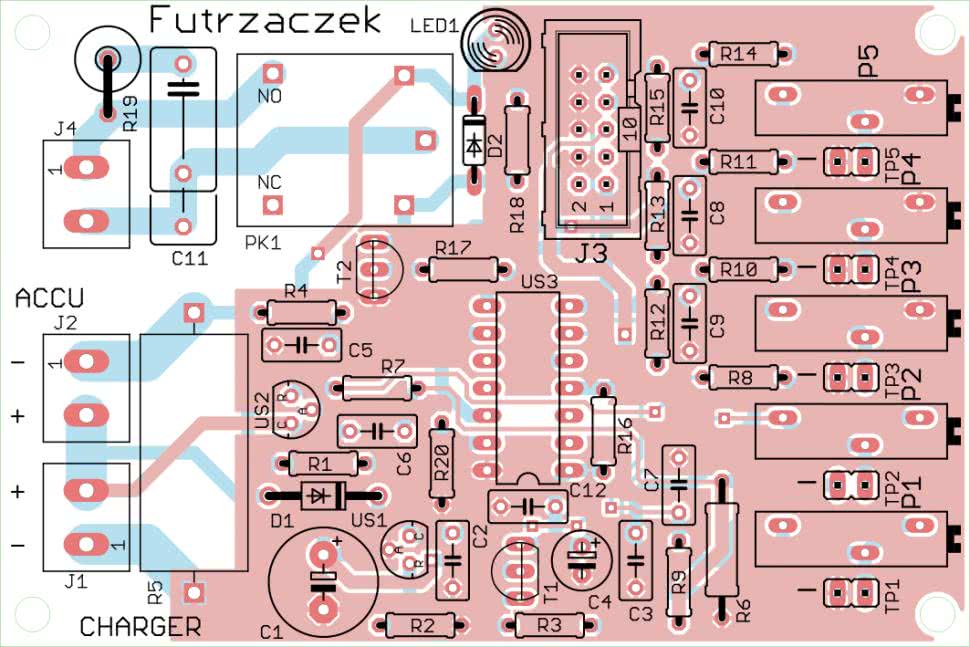
Wszystkie elementy znajdujące się na płytce są przystosowane do montażu przewlekanego. Należy je wlutować klasycznie, poczynając od najniższych, a na najwyższych kończąc. Pod układ scalony w obudowie DIP proponuję zastosować podstawkę, aby można było go łatwo wymienić w razie uszkodzenia. Rezystor R5 polecam przylutować w pewnym oddaleniu od powierzchni płytki, na nieco dłuższych wyprowadzeniach, aby ułatwić cyrkulację powietrza wokół niego. Gotowy, zmontowany układ powinien wyglądać jak na fotografii 1.
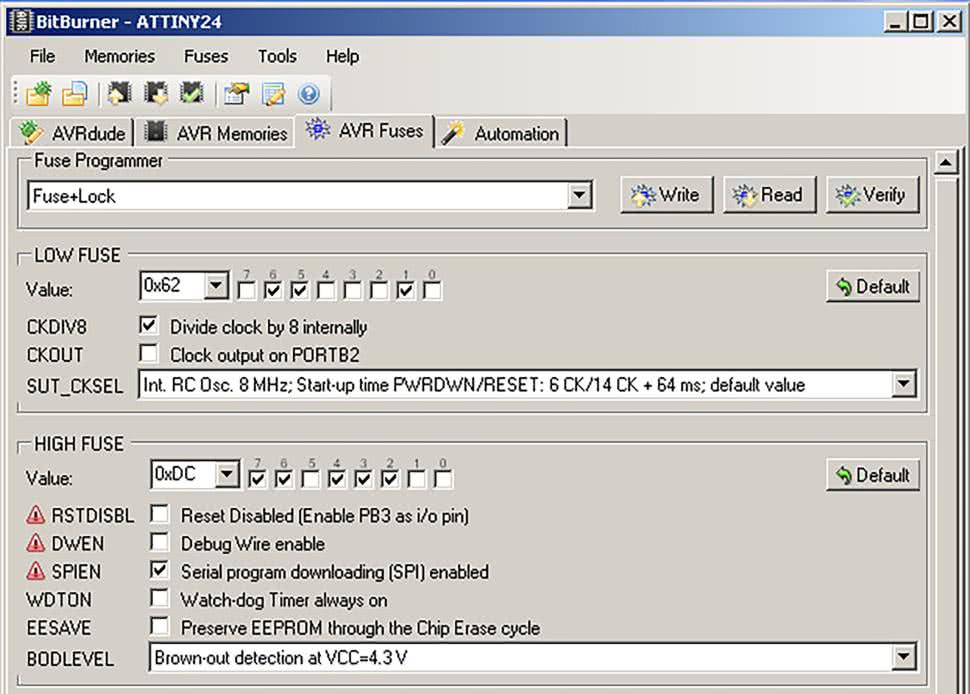
Zasilanie rozbudowanego sterownika powinno odbywać się napięciem stałym o wartości około 12 V, które pochodzi wprost z monitorowanego akumulatora kwasowego. Przed włączeniem zasilania należy upewnić się, że potencjometry P1 i P2 są ustawione w połowie dostępnej wartości. Mikrokontroler należy dodatkowo zaprogramować dostarczonym wsadem napięci Flash oraz zmienić jego bity zabezpieczające na wartości:
Low Fuse = 0x62
High Fuse = 0xDC
Szczegóły zostały pokazane na rysunku 3, który zawiera zrzut okna konfiguracji tych bitów z programu BitBurner. Spowoduje to załączenie obwodu Brown-Out Detector z progiem czułości około 4,3 V. To uchroni układ przed zawieszaniem się w trakcie włączania.
Pobór prądu zależy od napięcia akumulatora i stanu pracy układu. Z wyłączonym przekaźnikiem wynosi ono 5…15 mA, a po załączeniu wzrasta nawet do 40 mA. Zwiększenie poboru prądu po załączeniu się przekaźnika nie jest problemem, gdyż wtedy pracuje ładowarka sieciowa.
Eksploatacja urządzenia
Prawidłowo zmontowany układ należy podłączyć do akumulatora (złącze J2) i ładowarki (złącze J1). Należy zadbać o to, aby przewody łączące układ z akumulatorem były możliwie krótkie i grube, by spadek napięcia na nich był jak najniższy. Maksymalny prąd ładowania nie powinien przekraczać 5 A z uwagi na możliwość przegrzania rezystora R5 oraz możliwości pomiarowe układu. Zaciski złącza J3 należy potraktować jak styki wyłącznika sieciowego 230 V, który załącza ładowarkę.
Po podłączeniu do akumulatora, należy wykonać kilka kalibracji. Ich przeprowadzenie zajmie nie więcej niż kilka minut. Najlepiej posłużyć się w tym celu woltomierzem cyfrowym o możliwie wysokiej dokładności oraz znacznej rezystancji wewnętrznej (najlepiej 10 MΩ lub więcej). Do podglądu wartości ustawianego napięcia służą zaciski TP1…TP5, które odpowiadają potencjometrom P1…P5. Na płytce oznaczono ujemny zacisk każdego z tych punktów pomiarowych.
W pierwszej kolejności należy podłączyć woltomierz do TP1 i potencjometrem P1 ustawić napięcie równe 5 V. Im dokładniej uda się je ustalić, tym lepiej. Następnie należy przełączyć woltomierz do zacisków TP2 i ustawić napięcie 10 V – również im dokładniej, tym lepiej dla późniejszego działania układu.
Pozostałe trzy potencjometry należy ustawić według swoich upodobań, mając na uwadze prawidłową eksploatację akumulatora w danej temperaturze – szczegółów dostarcza producent w karcie katalogowej swojego wyrobu. Najpierw potencjometrem P3 ustawiamy napięcie maksymalne, powyżej którego zostanie odłączone ładowanie, zgodnie ze wzorem:
UMAX=10 V+UTP3
Dla przykładu, chcąc uzyskać odłączanie się ładowarki powyżej 14,4 V, należy na zaciskach TP3 ustawić potencjometrem P3 napięcie równe 4,4 V. Analogicznie z napięciem minimalnym, które ustawia się potencjometrem P4, zgodnie ze wzorem:
UMIN=10 V+UTP4
Czyli chcąc załączać ładowarkę przy napięciu poniżej 10,8 V, trzeba ustawić napięcie równe 0,8 V na zaciskach TP4. Ostatni potencjometr dotyczy minimalnego prądu ładowania. Zależność między napięciem ustawionym na zaciskach TP5 a prądem jest taka:
IMIN=(UTP5 [V]/2) [A]
Czyli chcąc odłączać ładowarkę poniżej prądu 1 A, należy ustawić napięcie rzędu 2 V. Jeżeli nie chcemy korzystać z tej funkcji, wystarczy skręcić P5 tak, aby napięcie na TP5 było równe zero (dokładnie: poniżej 50 mV). Mikrokontroler zablokuje wtedy tę funkcję.
Napięcie na zaciskach akumulatora jest „fałszowane”, a dokładniej pomniejszone o spadek napięcia na rezystorze R5. Dlatego mikrokontroler uwzględnia ten spadek napięcia podczas pomiaru napięcia akumulatora. Wprawdzie R5 nie jest rezystorem precyzyjnym, ale uznano, że napięcie na jego zaciskach stanowi niewielki procent napięcia akumulatora, więc dokładność pomiarów napięcia dokonywanych przez układ można utrzymać na wysokim poziomie.
Michał Kurzela, EP
- R1: 2,2 kΩ
- R2, R4, R7, R9…R16, R20: 10 kΩ
- R3: 9,1 kΩ
- R5: 0,1 Ω 5 W
- R6: 560 Ω 1 W
- R8: 27 kΩ
- R17, R18: 4,7 kΩ
- R19: 33 Ω 3 W
- P1: 2 kΩ montażowy, wieloobrotowy, leżący
- P2: 10 kΩ montażowy, wieloobrotowy, leżący
- P3…P5: 100 kΩ montażowe, wieloobrotowe, leżące
- C1: 1000 µF 25 V raster 5 mm
- C2, C3, C5…C10, C12: 100 nF raster 5 mm MKT
- C4: 100 µF 25 V raster 2,54 mm
- C11: 100 nF 310 VAC X2 raster 15 mm
- D1: 1N5817
- D2: 1N4148
- LED1: 5 mm zielona matowa
- T1, T2: BC546 lub podobny
- US1, US2: TL431CLP TO92
- US3: ATtiny24A DIP14
- J1, J2, J4: ARK2/500
- J3: IDC 10 pin 2,54 mm pionowe
- PK1: JQC-3FF 12 V lub podobny
- TP1…TP5: goldpin 2 piny męski THT 2,54 mm
- Jedna podstawka DIP14












