Zaloguj
Zaloguj



Regulator może być zasilany napięciem z zakresu 8…30 V DC, co zapewnia współpracę z typowymi silnikami prądu stałego. Maksymalna obciążalność prądowa regulatora wynosi 2 A.
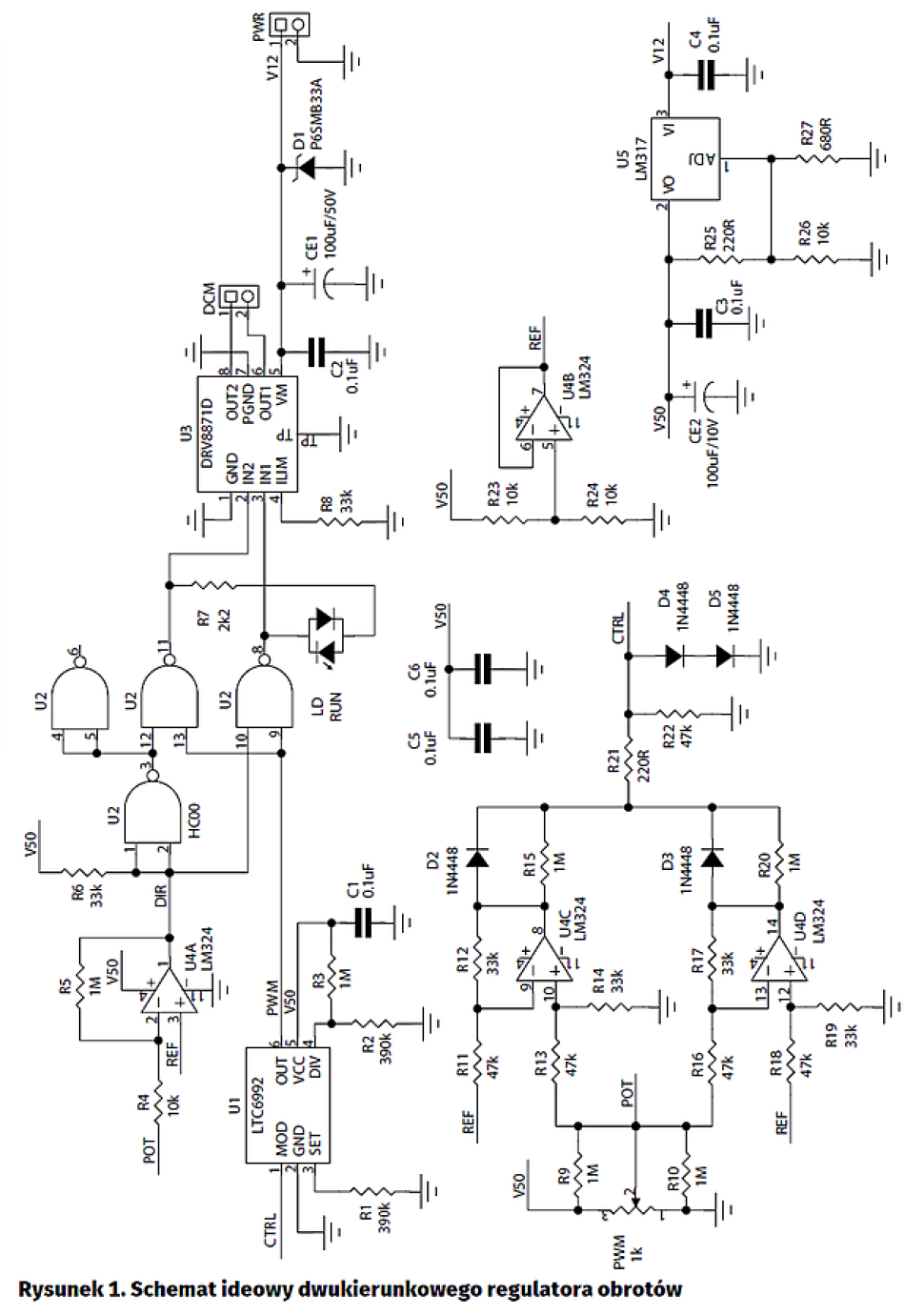
Schemat ideowy regulatora pokazano na rysunku 1. Składa się on z czterech bloków funkcjonalnych:
- Generatora PWM 0…100% sterowanego napięciem – układu scalonego typu LTC6992-1 (U1).
- Bloku obróbki sygnału sterującego z układem LM324 (U4).
- Detektora kierunku i logiki sterującej driverem silnika 74HC00 (U2).
- Drivera silnika z zabezpieczeniami – układu scalonego DRV8871 (U3).
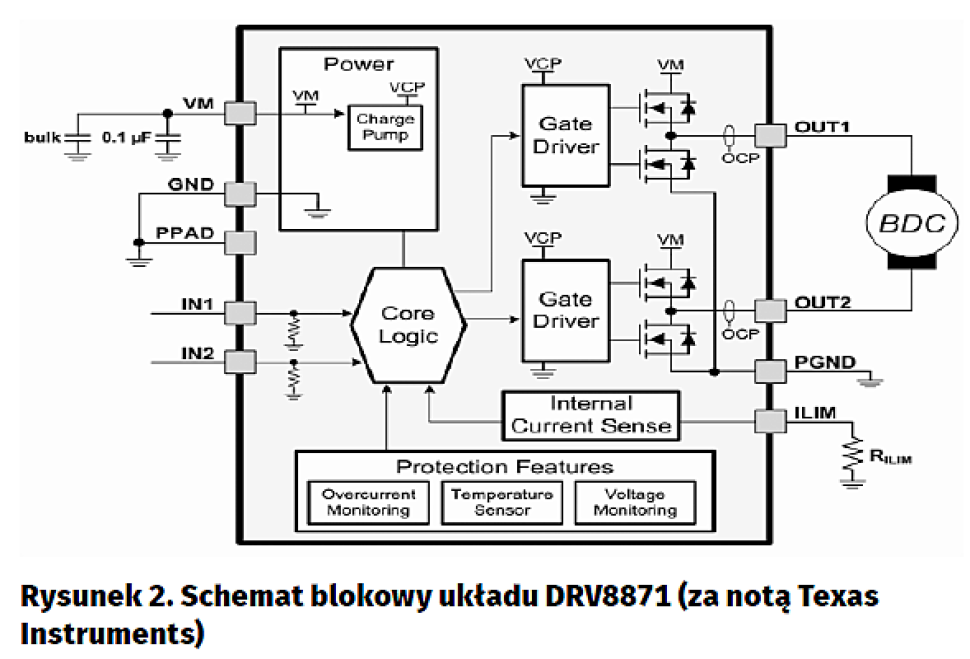
Zasilanie układu sterującego zapewnia U5 typu LM317. Układ drivera silnika jest oparty o specjalizowany układ scalony typu DRV8871 (U3) firmy TI. Jego schemat blokowy pokazano na rysunku 2. Zawiera on wszystkie komponenty niezbędne do realizacji sterowania silnikiem szczotkowym prądu stałego: dwa półmostki MOSFET o małej rezystancji Rdson i z bezstratnym układem pomiaru prądu silnika niewymagającym zewnętrznych elementów, logikę zabezpieczającą, pompę ładunku do sterowania tranzystorów mocy, wbudowany układ zabezpieczeń przeciążeniowych i termicznych oraz wejściową logikę sterującą. Wbudowany czujnik prądu silnika nie wymaga zewnętrznego rezystora pomiarowego, ale w dalszym ciągu możliwa jest zmiana maksymalnego prądu uzwojeń poprzez dobór rezystora podłączonego do wyprowadzenia Ilim zgodnie ze wzorem Ilim=64/R8. W prototypie prąd ustalono na 2 A, co odpowiada rezystancji R8 wynoszącej około 33 kV. Minimalną wartość rezystora ustalono na 15 kV. Rezystor powinien być dobrany w zależności od zastosowanego silnika.
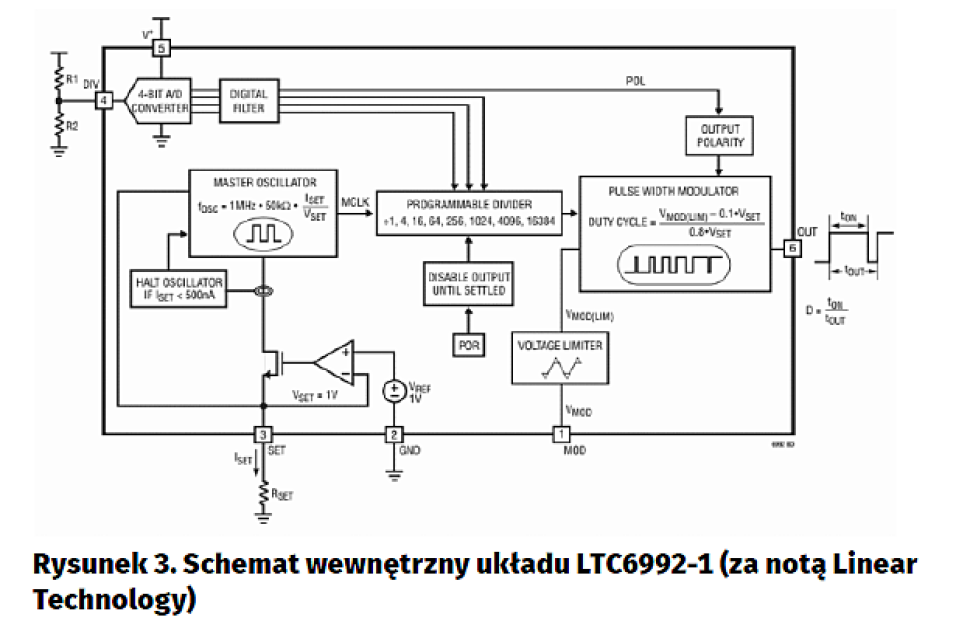
Za generowanie sygnału PWM odpowiada układ U1 typu LTC6992-1, którego schemat blokowy pokazano na rysunku 3. Zawiera on wszystkie bloki potrzebne do realizacji generatora PWM o ustalonej częstotliwości i regulowanym współczynniku wypełnienia. Częstotliwość odniesienia wbudowanego generatora jest ustalana rezystorem dołączonym do wejścia SET (R1). Dodatkowy podział częstotliwości ustala dzielnik przyłączony do wyprowadzenia DIV (R2/R3). Zmiana napięcia na wyprowadzeniu MOD w zakresie 0…1 V zmienia współczynnik wypełnienia w granicach 0…100%. W prototypie częstotliwość generatora ustalono na ok. 128 kHz, a stopień podziału na 256, co daje taktowanie PWM równe 500 Hz.
Napięcia zasilania 5 V dostarcza stabilizator U5 typu LM317 w typowej aplikacji. Regulator jest zasilany poprzez złącze PWR napięciem 8…30 V DC o mocy odpowiedniej do zastosowanego silnika. Silnik jest dołączany do złącza DCM.
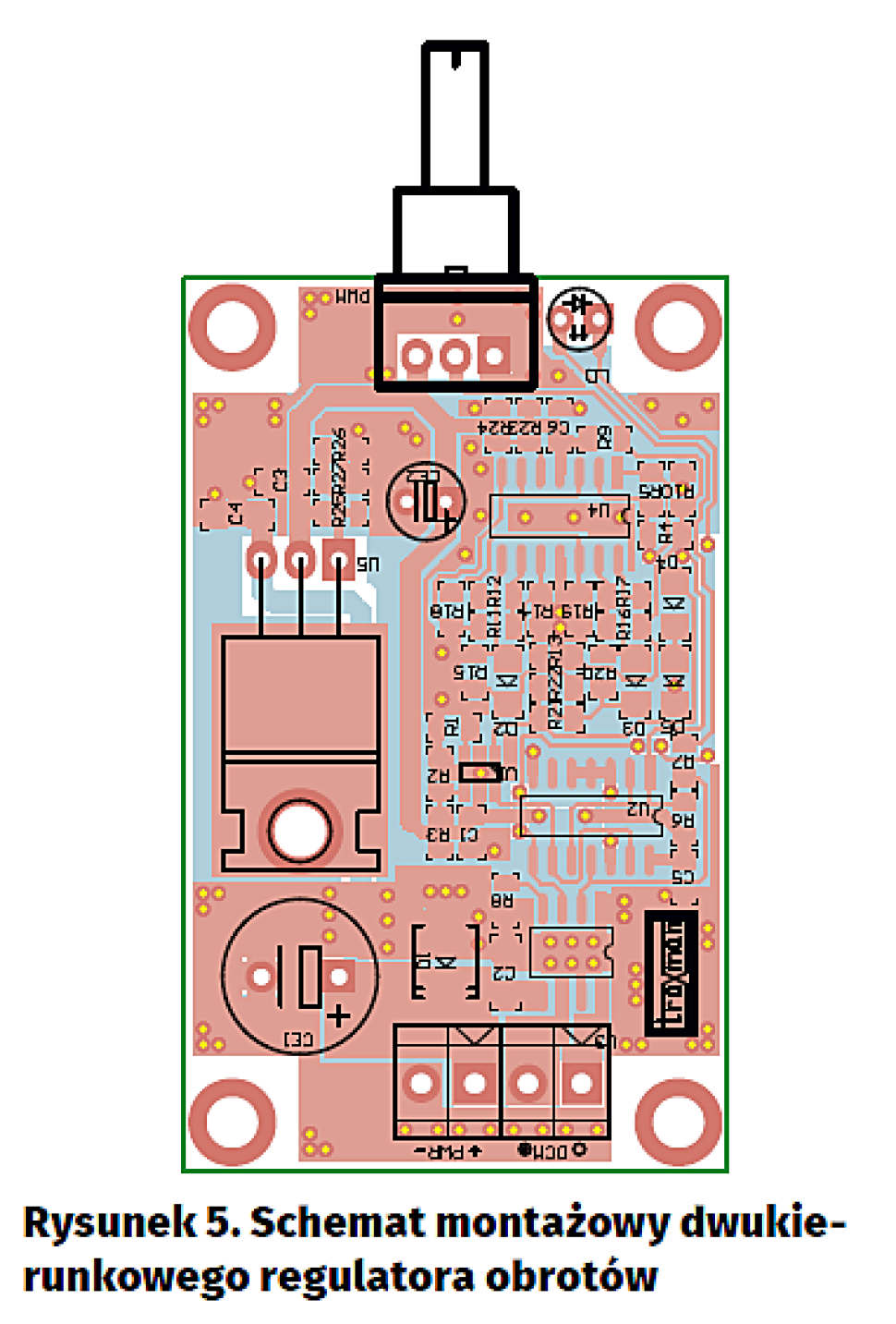
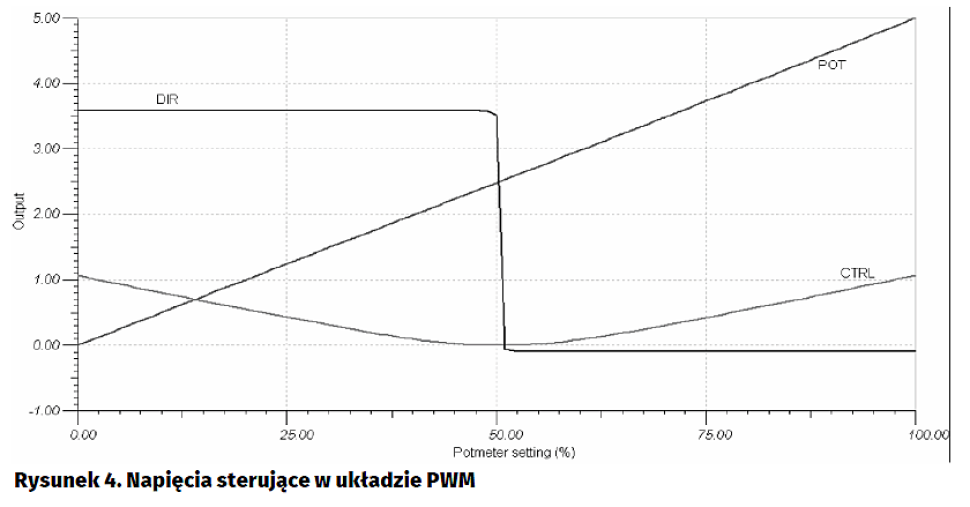
Moduł regulatora zmontowano na dwustronnej płytce drukowanej, której schemat montażowy pokazano na rysunku 5. W zależności od wymaganej precyzji regulacji w miejsce typowego potencjometru 9 mm (PWM) można wlutować złącze SIP i zastosować zewnętrzny potencjometr wieloobrotowy o rezystancji 1 kV. Układ U3 może być wyposażony w niewielki naklejany radiator dla obudowy SO8 ułatwiający odprowadzenie ciepła. Moduł zmontowany ze sprawnych elementów nie wymaga uruchamiania, jednak warto sprawdzić napięcia sterujące CTRL, DIR, PWM w zależności od położenia potencjometru.
Adam Tatuś, EP