 Zaloguj
Zaloguj



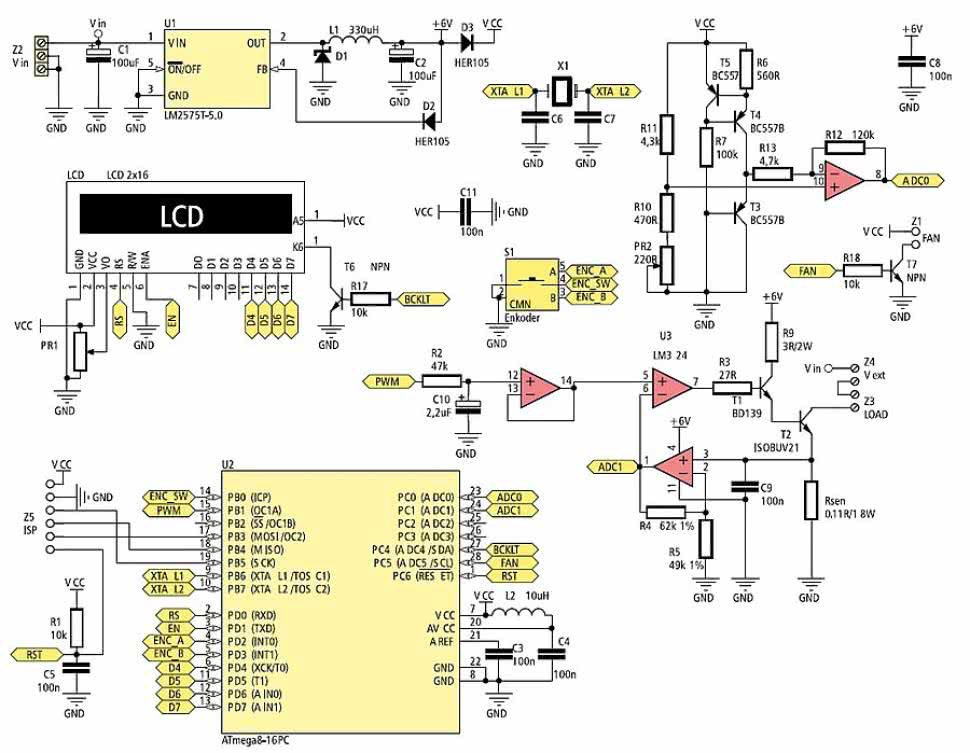
Rysunek 1. Schemat ideowy sztucznego obciążenia
Schemat ideowy urządzenia pokazano na rysunku 1. Układ stabilizatora U1 wraz z kondensatorami C1 i C2, diodą D1 i dławikiem L1 zasila całe urządzenie. Zdecydowałem się na ten układ ze względu na duży zakres napięcia wejściowego. Wyjaśnienia wymaga zastosowanie diod D2 i D3. Otóż w standardowej konfi guracji na nóżkę 4 układu LM2575T-5.0 jest bezpośrednio podawane napięcie wyjściowe, które dla tej wersji układu wynosi 5 V.
Włączenie diody D2 powoduje, że teraz na wyjściu to napięcie będzie podwyższone o spadek napięcia na tej diodzie, czyli będzie wynosiło 5 V+UD2. W urządzeniu modelowym wyniosło ono 5,6 V. To napięcie służy tylko do zasilania układu U3 typu LM324, który nie ma wyjścia rail-to-rail. Oznacza to, że zakres jego napięcia wyjściowego będzie znacznie niższy niż jego napięcie zasilania.
Z noty katalogowej wynika, że dla napięcia zasilającego +30 V napięcie wyjściowe wyniesie co najwyżej +28 V. Przy zasilaniu +5 V na wyjściu otrzymamy około +3,8 V. To trochę za mało i dlatego podwyższyłem napięcie zasilające U3 właśnie za pomocą diody D2.
Z kolei dioda D3 kompensuje ten naddatek, aby całą resztę układu, czyli głównie procesor U2 i wyświetlacz, zasilać napięciem +5 V. Dobrą praktyką jest, aby diody D2 i D3 były umiejscowione na płytce drukowanej możliwie blisko siebie. Powinny to być diody tego samego typu, o możliwie małym rozrzucie napięcia przewodzenia.
Podstawowym zadaniem mikrokontrolera ATmega8 jest generowanie przebiegu PWM (o rozdzielczości 10-bitów) oraz pomiar napięcia na rezystorze pomiarowym Rsen. Za pomocą PWM, pośrednio, mierząc napięcie na rezystorze pomiarowym, oprogramowanie reguluje wartość prądu obciążającego. Oprócz tego U2 steruje wyświetlaczem LCD o organizacji 16 znaków×2 linie. Jego podświetlanie pełni rolę dodatkowej sygnalizacji - alarmu o zbyt dużej temperaturze radiatora.
Zamiast typowych przycisków zdecydowałem się na zastosowanie impulsatora z aktywną ośką. Co prawda obsługa programowa jest trochę bardziej skomplikowana, ale korzystanie z takiego rozwiązania jest łatwiejsze i przyjemniejsze. Mikrokontroler jest taktowany za pomocą zewnętrznego rezonatora o częstotliwości 16 MHz. Przejdźmy teraz do opisu części analogowej.
Przebieg PWM generowany przez mikrokontroler trafia na układ całkujący złożony z rezystora R2 i kondensatora C10. Następnie jest podawany na wtórnik napięciowy. Tak przygotowany trafia na kolejną część układu U3, w której jest porównywany ze wzmocnionym napięciem pomiarowym z rezystora Rsen. Jednocześnie, to wzmocnione napięcie pomiarowe jest podawane na wejście ADC1 mikrokontrolera U2. Pozwala to na wyświetlenie wyników pomiarów na LCD i jest sprzężeniem zwrotnym dla pętli regulacji.
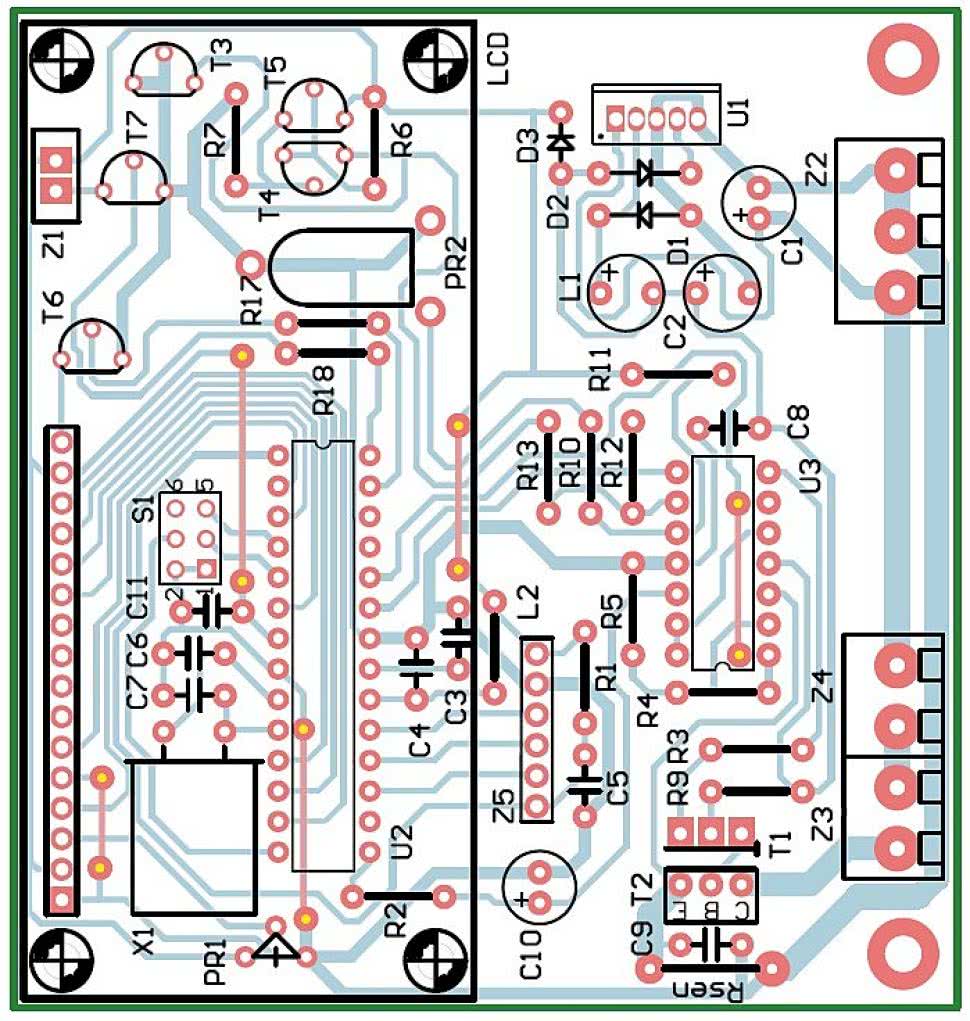
Rysunek 2. Schemat montażowy sztucznego obciążenia
W tym miejscu zwracam uwagę, że zadawanie parametrów odbywa się poprzez procesor i sygnał PWM, jednak sama regulacja jest wykonywana w sposób analogowy za pomocą wzmacniacza U3. Niestety, nie można zakładać stałości parametrów zastosowanych elementów, stąd konieczne jest regulowanie sygnału PWM w celu utrzymania stałych parametrów pracy.
Za wzmocnienie sygnału pomiarowego odpowiadają rezystory R4 i R5, dlatego w ich roli sugeruję zastosowanie takich o tolerancji 1% lub mniejszej. Stosunek rezystancji R4:R5 powinien wynosić 1,27:1. Jako tranzystor wykonawczy T2 wykorzystałem ISOBUV21 (po prostu taki był pod ręką). Niestety, jego wzmocnienie prądowe jest małe, więc konieczne stało się zastosowanie dodatkowego tranzystora pośredniczącego T1 - tutaj BD139.
Ponieważ do dyspozycji pozostała mi jedna ćwiartka układu U3, więc postanowiłem wykorzystać ją do zbudowania miernika temperatury. Duża dokładność nie jest wymagana - zdecydowałem się w roli czujnika wykorzystać złącze tranzystora PNP, który przykręciłem do radiatora. Napięcie z przekątnej mostka trafi a po wzmocnieniu do wejścia ADC0 układu U2 i tam jest zamieniane na ekwiwalent temperaturowy.
Rezystory R6 i R7 oraz tranzystory T4 i T5 tworzą źródło prądowe, stabilizujące prąd płynący przez tranzystor T3 wykorzystany jako czujnik temperatury. Poprawia to nieco dokładność pomiaru. Tranzystor T7 steruje pracą wentylatora chłodzącego radiator.
Konieczność jego zasilania z 5 V wynika z chęci uzyskania szerokiego zakresu napięcia wejściowego zasilającego urządzenie. Takie rozwiązanie uniezależnia nas od zewnętrznego zasilacza, ale niestety dodatkowo obciąża stabilizator U1 i dlatego najlepiej wyposażyć go w mały radiator.
Wykaz elementówRezystory: Kondensatory: Półprzewodniki: Inne: |
Obsługa urządzenia
Obracając impulsatorem poruszamy się po drzewie menu w górę lub w dół, natomiast przejście do "gałęzi" odbywa się poprzez naciśnięcie ośki. Menu "Tryb" służy do wyboru charakterystyki obciążenia. Do wyboru mamy tryby: ciągły, impulsowy, trójkątny i piłokształtny. W każdym z nich, innym niż ciągły, potrzebujemy dodatkowych parametrów charakteryzujących przebieg obciążania. Tych ustawień dokonujemy za pomocą menu "Ustawienia". Dostępnym parametrami są okres i wypełnienie. Wyboru dokonujemy spośród kilku stałych wartości.
Po wybraniu menu "Start" urządzenie rozpoczyna pracę. Ustawienie amplitudy (wartości prądu obciążającego) następuje na bieżąco w miarę obracania ośką impulsatora. Ponieważ mamy możliwość ustawienie 1024 poziomów (10 bit PWM) konieczne stało zaimplementowanie mnożnika impulsów. Jeśli teraz (tj. będąc w menu "Start") naciśniemy ośkę impulsatora, wprowadzone za jego pomocą nastawy będą mnożone - zgodnie z wyświetlanym opisem - przez 8, 4 lub 1. Tu mamy również możliwość wyłączenia balastu.
Montaż i uruchomienie
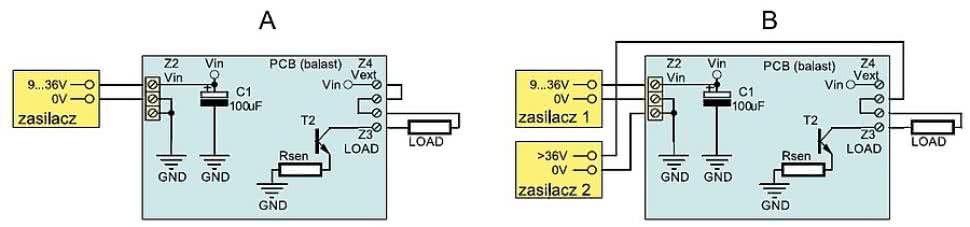
Rysunek 3. Sposób dołączenia obciążenia: a) element obciążany i obciążenie zasilane z tego samego źródła, b) element zasilany i obciążenie zasilane z różnych źródeł
Schemat montażowy sztucznego obciążenia zamieszczono na rysunku 2. Montaż należy rozpocząć od wlutowania pięciu zworek. Urządzenie składa się z komponentów do montażu przewlekanego, więc zlutowanie całości nie nastręczy najmniejszych problemów nawet początkującym. Należy jedynie pamiętać o poprawnej polaryzacji diod i kondensatorów. Pod układy scalone należy zastosować podstawki.
Po zakończonym montażu nie wkładamy układów U2 i U3 do podstawek zanim nie upewnimy się, że wartości napięcia zasilającego są odpowiednie. Dla układu U2 napięcie powinno być zbliżone do +5 V, natomiast dla U3 powinno wynosić 5,6 V.
Po załączeniu zasilania i zaprogramowaniu procesora układ jest gotów do pracy. Jedyną konieczną regulacją jest ustawienie temperatury radiatora za pomocą PR2. Można też odkręcić T3 od radiatora, poczekać na ustabilizowanie się jego temperatury i ustawić temperaturę pokojową.
Złącza Z2, Z3, Z4 zaprojektowano w taki sposób, aby obciążany element i układ mogły być zasilane dwojako. Zilustrowano to na rysunku 3. Jeśli chcemy zasilać zarówno element obciążany jak i urządzenie z tego samego źródła (napięcie mniejsze od 36 V), zwieramy złącze Z4 zewnętrznym mostkiem.
Do Z3 włączamy odbiornik, a do Z2 doprowadzamy zasilanie (rys. 3a). Może się jednak okazać, że testowane napięcie (odbiornik) będzie wymagało znacznie wyższego napięcia lub będzie dysponowało swoim własnym. Wtedy do Z3 dołączamy obciążenie, masę obu urządzeń łączymy w złączu Z2, a testowany odbiornik do odpowiedniego pinu w gnieździe Z4 (rys. 3b).
Jak wspomniałem, układ modelowy zbudowałem z użyciem tranzystora ISOBUV21. Jednak oprócz niego przetestowałem też tranzystor S2000AF. Oba mają mniej więcej takie samo wzmocnienie, jednak są przeznaczone do innych zastosowań. Tranzystor S200AF może pracować przy napięciu kolektor-emiter powyżej 1000 V i prądzie do 8 A, natomiast ISOBUV21 może przewodzić duży prąd (do 40 A) i ma niższe dopuszczalne napięcie kolektor-emiter wynoszące 200 V.
W zasadzie nie ma większych przeciwwskazań, aby obudowa radiatora była połączona z masą GND. Ułatwi to nieco montaż na radiatorze. Ja jednak zdecydowałem się odizolować radiator od obwodów elektrycznych. Stało się tak głównie dlatego, że oba w/w tranzystory wykonawcze są izolowane. Jedynie czujnik temperatury (T3) musiałem przymocować na podkładce izolacyjnej.
Janusz Gwóźdź












