Zaloguj
Zaloguj




Zasilacz umożliwia uzyskanie napięcia stabilizowanego o regulowanej wartości 2,5...30 V z dwóch niezależnych, odseparowanych galwanicznie źródeł, które można łączyć ze sobą równolegle lub szeregowo wprowadzając ograniczenia prądowe. Wszystkie parametry można zapisać w nieulotnej pamięci, co pozwala na szybkie odtworzenie wymaganych nastaw. Dostępne jest 30 komórek pamięci umożliwiających użytkownikowi zapamiętanie najczęściej używanych konfiguracji źródeł napięcia. Obsługa odbywa się dzięki przejrzystemu menu pokazywanemu na ekranie wyświetlacza LCD o rozdzielczości 4 wiersze×20 znaków oraz impulsatorowi, za pomocą którego można poruszać się po menu. Ponadto, na wyświetlaczu są pokazywane bieżące (zmierzone) wartości napięć i prądów wyjściowych.
Podstawowe informacje:
- Napięcie wyjściowe: 2×2,5...30 V DC.
- Separacja galwaniczna obu źródeł zasilania.
- Możliwość łączenia źródeł szeregowo, równolegle lub praca niezależna.
- Krok regulacji: co 0,1 V.
- Maksymalny, wyjściowy prąd obciążenia: 2×5 A DC.
- Ogranicznik prądowy: 0,1 A; 0,2 A; 0,3 A; 0,5 A; 0,8 A; 1 A; 2 A; 3 A; 5 A.
- Regulacja nastaw za pomocą impulsatora.
- Ciągły pomiar prądu i napięcia.
- Menu i wskazania na wyświetlaczu LCD.
Budowa
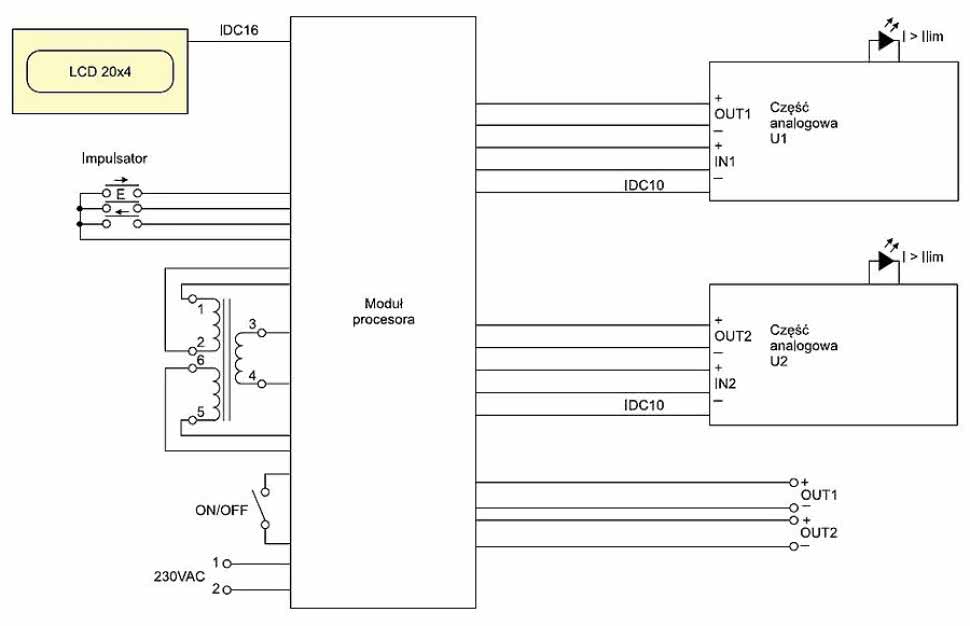
Rysunek 1. Schemat blokowy zasilacza
Zasilacz składa się z 3 bloków funkcjonalnych – modułu procesora, dwóch bliźniaczych modułów analogowych i transformatora toroidalnego. Schemat blokowy zasilacza zamieszczono na rysunku 1.
Moduł procesora zawiera mikrokontroler sterujący pracą pozostałych bloków. Do jego płytki są doprowadzone sygnały modułów analogowych, transformatora, zaciski wyjściowe i napięcie sieciowe, wyświetlacz LCD, impulsator, i włącznik główny. Schemat ideowy modułu procesora pokazano na rysunku 2.
Napięcie sieci energetycznej doprowadzone do zacisków 1 i 2 poprzez układ włącznika złożony z obwodu triaka T3 oraz optotriaka IC9, zasila uzwojenie pierwotne transformatora. Można oczywiście zrezygnować z rozbudowanego obwodu włącznika i dołączyć napięcie sieciowe bezpośrednio przez włącznik do transformatora. Jednak transformator w chwili włączenia pobiera stosunkowo duży prąd, co w konsekwencji prowadzi do wypalenia styków włącznika lub wymaga zastosowania dużego włącznika i bezpiecznika sieciowego, znacznie większego, niż prąd płynący w czasie pracy zasilacza. Zastosowanie obwodu triaka i optotriaka gwarantuje miękki start dzięki układowi włączania w zerze zaimplementowanemu w optotriaku. Napięcie sieciowe ograniczone przez dwójnik rezystor R7 – kondensator C6 jest prostowane przez mostek Br3 i filtrowane za pomocą kondensatora C15, poprzez włącznik sieciowy zasila diodę optotriaka włączając uzwojenie pierwotne transformatora. Dzięki takiemu rozwiązaniu można użyć włącznika miniaturowego o niewielkich wymiarach. Dioda Zenera D4 ogranicza napięcie na kondensatorze C15 w czasie otwarcia wyłącznika sieciowego.
Transformator ma dwa identyczne uzwojenia wtórne dołączone do mostków Graetza Br1 i Br2 oraz kondensatorów C9…C14. W ten sposób uzyskuje się napięcia wejściowe ok. 35 V zasilające moduły analogowe, opisane jako Ua i Ub.
Napięcie Ua jest również używane do zasilania części cyfrowej. Stabilizator impulsowy IC7 pracujący w konfiguracji step down wytwarza napięcie pomocnicze 12 V, z którego są zasilane przekaźniki PX1 i PX2 oraz uzyskuje się w stabilizatorze szeregowym IC8 napięcie 5 V przeznaczone do zasilania systemu mikroprocesorowego. Zdecydowałem się na użycie stabilizatora impulsowego IC7 z uwagi na stosunkowo duże napięcie wejściowe. Przy zastosowaniu stabilizatora liniowego moc strat byłaby dość spora i w konsekwencji ten wymagałby użycia radiatora. Można było również zastosować regulator impulsowy o napięciu wyjściowym 5 V i zrezygnować ze stabilizatora IC8, ale wówczas cewki przekaźników PX1 i PX2 powinny być na 5 V, takie przekaźniki są droższe i mniej popularne.
Głównym elementem modułu procesora jest mikrokontroler IC3 typu AT89S52, do którego dołączono pamięć 24C02 (IC1) przeznaczoną do przechowywania nastaw użytkownika, wyświetlacz LCD, impulsator oraz moduł analogowy. Część analogowa jest dołączona do złącza Z1 i zasilana, tak jak moduł procesora z napięcia Ua, więc ma z nim wspólną masę, natomiast moduł analogowy – dołączony do złącza Z2 – jest zasilany jest z napięcia Ub i galwanicznie odseparowany od pozostałych modułów. Z tego powodu wymaga zastosowania dodatkowych transoptorów IC2...IC6.
Impulsator jest elementem standardowym, w którym kierunek obrotu jest określany za pomocą detekcji przesunięcia impulsów na wyprowadzeniach "A" i "B". Wyprowadzenie oznaczone jako "E" jest dołączone do przycisku. Po naciśnięciu osi enkodera jest ono zwierane do masy. Można zamiast niego użyć trzech klawiszy push button, a program obsługi jest tak napisany, że zasilacz będzie działał poprawnie, ale jego obsługa nie będzie wygodna, bo zamiana napięcia wyjściowego np. z 10 V na 20 V wymagałaby 100 przyciśnięć klawisza. Wszystkie sygnały z impulsatora są sumowane na drabince diodowej DD1 podłączonej do wejścia INT0 mikrokontrolera. Jest to wejście przerwania zewnętrznego. Impulsator jest obsługiwany przez procedurę przerwania INT0, co znacznie upraszcza sposób detekcji kierunku obrotów.
Do każdego z modułów analogowych doprowadzono 4 linie:
- Linia DATA_OUT służy do wysyłania danych z modułu procesora do modułu analogowego.
- Linia DATA_IN jest przeznaczona do odbierania przez procesor danych z przetwornika A/C znajdującego się w module analogowym.
- Linia CLK synchronizuje sygnały wejściowy i wyjściowy.
- Linia STROBE powoduje zapis wprowadzanych danych.
Przekaźniki PX1 i PX2 są załączane z portów P2.0 i P2.1 mikrokontrolera przez tranzystory T1 i T2 i służą do połączenia napięć U1 i U2 szeregowo lub równolegle.
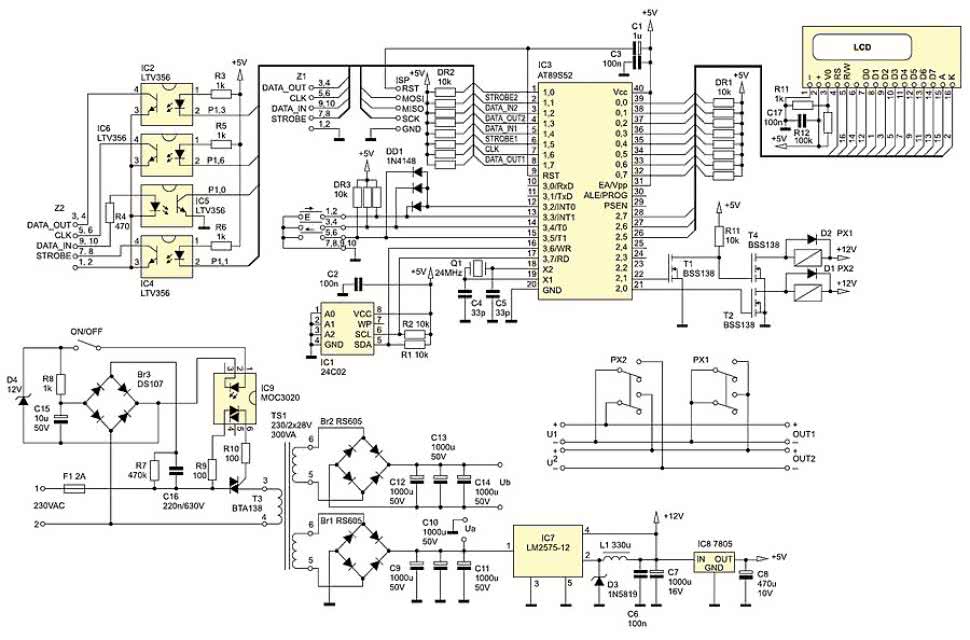
Rysunek 2. Schemat ideowy bloku procesora
Wyświetlacz dołączono do portu P0 mikrokontrolera. W pierwszym wierszu jest wyświetlany numer aktualnego rekordu nastaw oraz czy napięcia U1 i U2 są połączone szeregowo, równolegle czy oba kanały są używane niezależnie. W drugim wierszu jest wyświetlany wynik pomiaru napięć U1 i U2, natomiast w trzecim wynik pomiaru prądów I1 i I2. W czwartym wierszu jest pokazywana informacja na temat ograniczników prądowych ustalonych dla źródeł obu napięć U1 i U2.
Zadaniem modułu analogowego jest stabilizowanie napięć wyjściowych U1 oraz U2. W zasilaczu zastosowano dwa identyczne moduły analogowe zasilane z dwóch odrębnych uzwojeń transformatora przez napięcia Us i Ub. Schemat modułu analogowego pokazano na rysunku 3.
Głównym elementem modułu jest regulowany stabilizator impulsowy LT1074 (IC1). Jego najważniejsze zalety w tej aplikacji to szeroki zakres napięcia wejściowego i maksymalny prąd obciążenia wynoszący 5 A. Wartość napięcia wyjściowego ustala dzielnik rezystancyjny dołączony do wyprowadzenia 5 (feedback). Składa się on z rezystora R3 oraz drabinki rezystancyjnej R4…R13. Rezystancja wypadkowa drabinki jest zmieniana poprzez zwieranie poszczególnych rezystorów tranzystorami T1…T9. W ten sposób można uzyskać napięcie wyjściowe w zakresie od 2,5…30 V z rozdzielczością 0,1 V. Gdy wszystkie tranzystory (T1…T9) nie przewodzą, to napięcie wyjściowe wynosi 2,5 V. Otwierając kolejno tranzystory podwyższa się je o 0,1 V; 0,2 V; 0,3 V; 0,5 V; 1 V; 2 V; 4 V; 8 V; 15 V. Informacja, które tranzystory przewodzą, a które nie jest przesyłana z modułu procesora do 16-bitowego rejestru szeregowego złożonego z dwóch układów 4094 (IC3 i IC4). Dane z mikrokontrolera są przesyłane linią DATA i taktowane sygnałem CLK. Bity B9…B15 decydują o ograniczeniu prądowym, a bity B0… B8 o wyborze napięcia wyjściowego. Bit B8 (wyprowadzenie Q1 układu IC4) załącza napięcie 15 V, a wyjście Q1 układu IC3 załącza napięcie 0,1 V. Po wysłaniu danych z mikrokontrolera są one zapamiętywane sygnałem STROBE. Dzięki temu w czasie przesyłania danych parametry napięcia na wyjściu nie zmieniają się.
Układ IC2 typu ULN2803 ma wyjścia typu OC (otwarty kolektor) i konwertuje sygnały z rejestru do poziomu napięcia sterującego bramkami tranzystorów T1…T8. Ponieważ zakres napięć przełączany jest 9 bitami, a IC2 ma 8 wyjść, dodatkowo w bramce T9 znajduje się tranzystor T10.
Ograniczenie prądowe wykonano wykorzystując wejście Ilim układu IC1. Jeśli na to wejście jest podawany sygnał o poziomie wysokim, to układ wyłącza napięcie wyjściowe. Do wejścia Ilim dołączono wyjście komparatora IC5, na którego wejście odwracające jest doprowadzony sygnał z układu pomiaru prądu, a na wejście dodatnie – napięcie referencyjne. Jest ono zmieniane poprzez klucz analogowy 4051 (IC10) w 9 krokach odpowiadających prądowi wyjściowemu o natężeniu 0,1 A; 0,2 A; 0,3 A; 0,5 A; 0,8 A; 1 A; 2 A; 3 A; 5 A. Napięcie +5 V jest dzielone przez dzielnik złożony z rezystorów R17… R20 i R34…R38, a klucz IC10 na podstawie danych z rejestru IC4, wybiera odpowiednie napięcie referencyjne. Kiedy na wyjściu Q5 układu IC4 jest poziom niski, tranzystor T11 nie przewodzi i nie ma spadku napięcia na dzielniku rezystancyjnym. W związku z tym napięcie referencyjne na wejściu dodatnim komparatora IC5 wynosi +5 V, co odpowiada ograniczeniu prądu do 5 A.
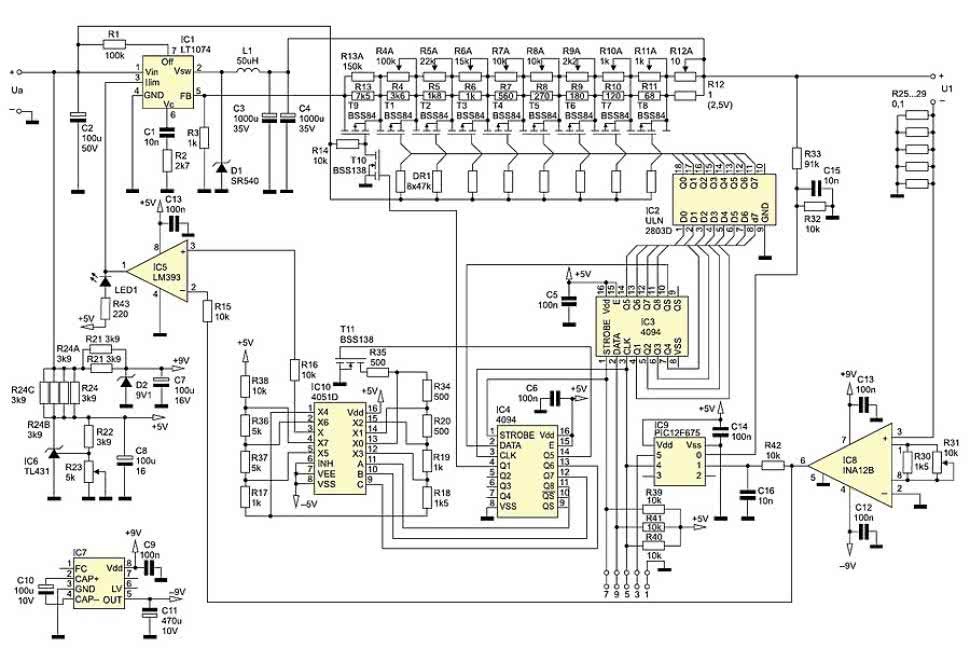
Rysunek 3. Schemat ideowy bloku analogowego
Pomiaru napięcia i prądu dokonuje mikrokontroler PIC12F675, który ma wbudowany 10-bitowy, 4-wejściowy przetwornik A/C. Zdecydowałem się na zastosowanie mikrokontrolera zamiast oddzielnego przetwornika z uwagi na elastyczność implementacji. Na wejście GP0 (nóżka 7) układu IC9 jest podawane napięcie wyjściowe zasilacza pochodzące z dzielnika rezystancyjnego R32/R33. Na wejście GP1 (nóżka 6) układu IC9 jest podane napięcie z układu pomiaru prądu. Linia zegarowa CLK z modułu procesora jest dołączona zarówno do rejestrów, jak i do mikrokontrolera PIC dokonującego równoczesnego pomiaru obu modułów analogowych. Ignoruje on sygnały zegarowe wysyłane z modułu procesora do rejestrów. Dopiero wtedy, gdy poziom niski na wejściu zegarowym jest 3-krotnie dłuższy niż normalnie, podczas transmisji do rejestrów, mikrokontroler PIC zaczyna przesyłać dane na wyjściu DATA_OUT (wyprowadzenie 5 układu IC9) w takt sygnału zegarowego CLK. Dane są już wstępnie przetworzone, a przesyłana liczba jest 3-bajtowa. Pierwsze 12 bitów to 3 cyfry w kodzie BCD zawierające wynik pomiaru napięcia, a kolejne 12 bitów to 3 wynik pomiaru prądu. Miernik ma rozdzielczość 0,1 jednostki, a wskazania nie przekraczają 500 jednostek (30,0 V i 5,00 A), więc do pomiaru wystarczy 9 z 10 bitów przetwornika. Mikrokontroler IC9 jest tak skonfigurowany, że napięcie referencyjne przetwornika stanowi jego napięcie zasilania. Dlatego napięcie zasilania jest wytwarzane w obwodzie precyzyjnego źródła IC6, gdzie wieloobrotowym potencjometrem montażowym R23 można je regulować kalibrując wskazania woltomierza.
Pomiar prądu odbywa się dzięki bocznikowi złożonemu z rezystorów R25…R29, których rezystancja wypadkowa wynosi 20 mV co przy maksymalnym prądzie wyjściowym 5 A daje spadek 100 mV. Napięcie to jest doprowadzone do wejścia wzmacniacza pomiarowego IC8, którego funkcja przejścia to Ku=50×((U+) - (U-)). Oznacza to, że przy prądzie wyjściowym równym 5 A napięcie na wyjściu wzmacniacza (nóżka 6) wynosi 5 V. Wieloobrotowy potencjometr montażowy dołączony do wyprowadzeń 1 i 8 wzmacniacza IC8 umożliwia kalibrację wskazań amperomierza.
Aby napięcie wyjściowe wzmacniacza IC8 oraz napięcia wejściowe komparatora IC5 mogły mieć wartość 5 V, układy te muszą być zasilane wyższym napięciem. Stąd obwód złożony z rezystora R21 i diody Zenera D2 dostarczający +9 V do zasilania tych układów. Ponadto, układ IC7 wytwarza napięcie -9 V, aby układ IC8 był zasilany symetrycznie.
Dioda LED zasilana z wyjścia komparatora IC5 (nóżka 1) zaczyna świecić, gdy ogranicznik prądowy załączy się.
Montaż i uruchomienie
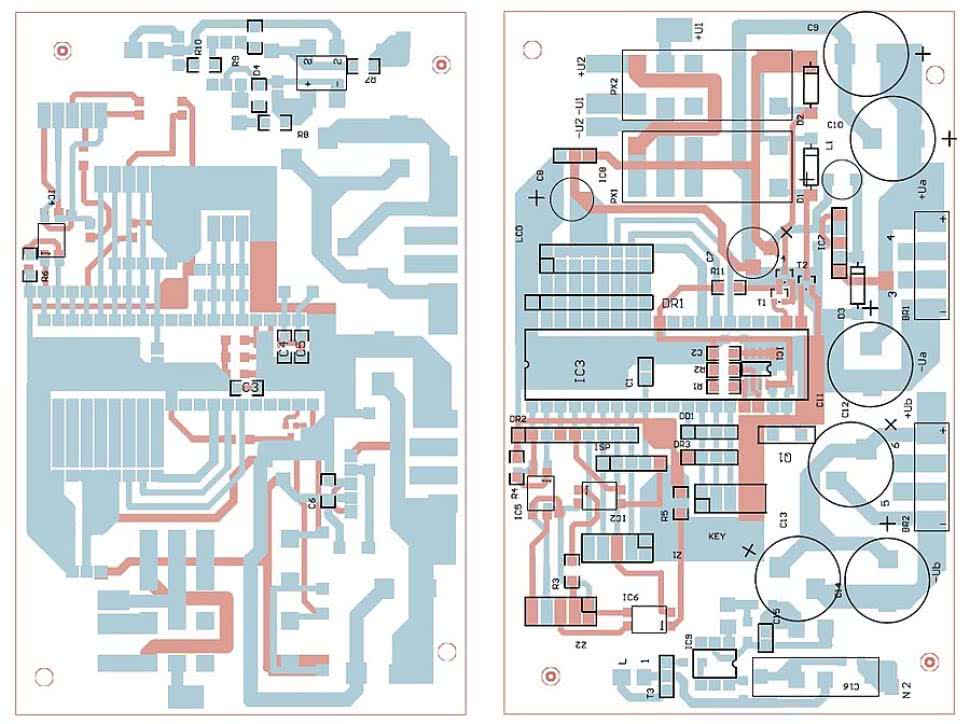
Rysunek 4. Rozmieszczenie elementów na płytce bloku procesora
Wszystkie moduły zmontowano na dwustronnej płytce dwustronnej z elementami SMD i przewlekanymi. Schematy montażowe poszczególnych płytek pokazano na rysunku 4 (płytka procesora) i rysunku 5 (płytka analogowa).
Montaż należy rozpocząć od elementów zasilaczy 12 V i 5 V zbudowanych z układów stabilizatorów IC7 oraz IC8. Następnie należy je uruchomić uzyskując stabilne napięcia 12 V i 5 V. Po sprawdzeniu poprawności działania można zamontować pozostałe elementy zaczynając od elementów SMD: pamięci IC1, rezystorów R1 i R2 oraz kondensatora C2, które znajdują się pod podstawką mikrokontrolera IC3 i po wlutowaniu podstawki dostęp do nich jest bardzo utrudniony. Jeśli ktoś zdecyduje się również na wyposażenie zasilacza w układ miękkiego startu zbudowany z triaka T3, to należy zachować przy tym szczególna ostrożność z uwagi na niebezpieczeństwo porażenia napięciem sieciowym. Osoby niedoświadczone, niemające odpowiednich kwalifikacji mogą zrezygnować z tego obwodu i zastosować zwykły włącznik sieciowy.

Rysunek 5. Rozmieszczenie elementów na płytce bloku analogowego
Trzeba zwrócić uwagę, aby poprawnie wlutować gniazdka złączy IDC10 i IDC16 służące do połączenia modułu procesora z pozostałymi modułami. Po zainstalowaniu wszystkich elementów modułu procesora można włączyć zasilanie i sprawdzić obecność napięcia +5 V na nóżkach 20 i 40 podstawki mikrokontrolera IC3. Następnie można dołączyć nóżkę 40 podstawki IC3 z 21 i 22, co musi spowodować zadziałanie przekaźników PX1 i PX2. Po takim teście można włożyć mikrokontroler AT89S52 (oczywiście przy wyłączonym napięciu) i zaprogramować go plikiem ZAS_CU.HEX znajdującym się w materiałach dodatkowych. Do tego celu na płytce drukowanej przewidziano złącze ISP. Można użyć mikrokontrolera AT89C52 z tym, że należy zaprogramować go przed umieszczeniem w podstawce. Program ma zajmuje blisko 8 kB.
Po włączeniu zasilacza z zaprogramowanym układem mikrokontrolera, na wyświetlaczu LCD powinien pojawić się komunikat:
CYFROWY ZASILACZ
U = 2x 2,5-30V
Imax= 2x 5A<
Jeśli taki komunikat pojawił się, to należy wyłączyć zasilacz i ponownie włączyć z tym, że podczas włączania należy przytrzymać przyciśnięty impulsator, co odpowiada naciśnięciu klawisza Enter. Wówczas układ uruchomi się w trybie serwisowym:
TRYB SERWISOWY
U1: 2,5V
U2: 2,5V
Imax= 2x 0,1A
Należy za pomocą impulsatora przejść menu do planszy: CZY FORMATOWAC EEPROM?
NIE
>TAK
Należy wybrać TAK. Nastąpi formatowanie pamięci EEPROM, które jest niezbędne na pierwszym etapie uruchamiania. Do pamięci zostanie wprowadzone 30 nastaw domyślnych, które później użytkownik będzie mógł modyfikować.
Montaż modułu analogowego należy zacząć od układu IC9 (PIC12F675). Jest to układ w obudowie SO-8. Po jego przylutowaniu należy go zaprogramować podłączając programator przewodami do płytki. Oczywiście można wlutować układ już zaprogramowany. Program dla IC9 jest w pliku ZC_ADC.HEX. Następnie należy wlutować elementy układu IC1 z tym, że dodatkowo od wyprowadzenia nr 5 do +kondensatora C4 należy dolutować rezystor 1,8 kV. Po włączeniu układu na kondensatorze C4 (napięcie wyjściowe) powinno wynosić około 4 V, co świadczy o poprawnej pracy stabilizatora IC1. Dławik L1 powinien być przystosowany do prądu ciągłego 5 A. Ja odwinąłem z dławika o większej indukcji odpowiednią ilość zwojów, aby uzyskać indukcyjność 50 mH. Przy pomiarach indukcyjności należy pamiętać, że IC1 pracuje z częstotliwością kluczowania około 100 kHz.
Następnie należy zamontować elementy obwodu diody Zenera D2 i układu IC7 oraz sprawdzić obecność napięcia ±9 V. Kolejny krok to montaż elementów układu IC6. Przed wlutowaniem potencjometr montażowy, wieloobrotowy R23 należy nastawić na wartość około 3,9 kV. Po włączeniu zasilania należy na kondensatorze C8 za pomocą potencjometru R23 ustawić napięcie +5 V.
Po takim przygotowaniu należy wlutować wszystkie pozostałe elementy. Ja nie montowałem potencjometrów R4A…R13A, a jedynie rezystory stałe R4…R13. Montażowe potencjometry wieloobrotowe są dość kosztowne i można obniżyć cenę urządzenia dobierając odpowiednio rezystory.
Po zmontowaniu całego modułu analogowego należy dołączyć go do płytki procesora za pomocą taśmy przewodów zakończonej wtykami IDC10 do gniazda Z1. Do modułu należy doprowadzić napięcie Ua, a zaciski napięcia wyjściowego U1 obciążyć rezystorem o rezystancji np. 470 V. Do zacisków U1 należy dołączyć woltomierz. Następnie należy uruchomić układ w trybie serwisowym. Moduł procesora wyśle dane ustawiając U1 na wartość minimalną tj. 2,5 V. Napięcie to należy skorygować do poprawnej wartości zmieniając rezystancję rezystora R12. Ja robiłem to w ten sposób, że za pomocą przewodów włączyłem równolegle z R12 rezystor dekadowy (może to być oczywiście potencjometr) i ustalałem napięcie 2,5 V na U1, a następnie dolutowywałem do R12 rezystor z szeregu o rezystancji najbliższej do wskazywanej przez dekadę lub zmierzonej rezystancji potencjometru. Po kliknięciu impulsatorem do modułu analogowego zostaną wysłane dane ustawiające wartość napięcia U1 na poziomie 2,6 V, a dokładnie – do ustawionego napięcia 2,5 V zostaje dodane 0,1 V dzięki wyłączeniu tranzystora T8. Należy skorygować U1 do wartości 2,6 V za pomocą potencjometru montażowego R11A lub przez dołączenie równolegle do R11 rezystora wyznaczonego metodą opisaną poprzednio. Kręcąc impulsatorem powtarzamy czynności dla kolejnych napięć 2,7 V; 2,8 V; 3 V; 3,5 V; 4,5 V; 6,5 V; 10,5 V; 17,5V. Zmieniając poszczególne wartości za pomocą menu, za każdym razem przestaje przewodzić tylko jeden z tranzystorów T1…T9. Po ustaleniu napięć można kliknięciem impulsatora (Enter) przejść do regulowania wartości ograniczenia prądowego poprzez dobór wartości rezystorów podłączonych do klucza IC10. W zasadzie można od razu wlutować oporniki o wartości podanej na schemacie i tolerancji 5%, ponieważ natężenie prądu ograniczenia nie jest krytyczne.
Po takiej regulacji moduł analogowy można dołączyć do gniazda Z2 modułu procesora i zasilić go z napięcia Ub. Moduł musi zachowywać się identycznie, jak poprzednio potwierdzając poprawność transmisji danych poprzez barierę izolacji, którą stanowią transoptory modułu procesora.
Po uruchomieniu układu w trybie normalnej pracy zostaną do modułów analogowych wysłane dane z pierwszej komórki pamięci. Kręcenie impulsatorem powoduje przełączanie się pomiędzy poszczególnymi nastawami domyślnymi. Naciskając impulsator wchodzimy w tryb wprowadzania zmian nastawy. W pierwszej kolejności wybieramy sposób połączenia źródeł napięć U1 i U2. Mogą one być połączone równoległe, szeregowe lub pracować niezależnie. Następnie przez naciskając impulsator przechodzimy do regulacji napięcia z tym, że jeśli napięcia U1 i U2 połączone są równolegle, to wartości napięć i prądów dla U1 i U2 są identyczne. W trybie pracy jako źródło dwóch napięć niezależnych lub połączonych szeregowo, parametry te ustala się oddzielnie. Po zakończeniu wprowadzenia ustawień można wybrać powrót do regulacji, powrót do ustawień z pamięci EEPROM lub zapamiętać wprowadzone zmiany.
Pozostało jeszcze skalibrowanie woltomierzy i amperomierzy. W tym celu należy obciążyć zasilacz i dołączyć woltomierz do wyjścia napięcia U1 (następnie U2) i ustawić minimalną wartość napięcia wyjściowego 2,5 V. N astępnie za pomocą potencjometru R23 na module analogowym ustawić wskazanie na wyświetlaczu LCD napięcia zgodnego z dołączonym woltomierzem. Należy powtórzyć tę czynność dla napięć wyjściowych 12 V i 25 V. Warto po tym sprawdzić wskazania i w razie potrzeby powtórzyć kalibrację. Należy pamiętać, że woltomierz zasilacza ma rozdzielczość 0,1 V i jest ona mniejsza niż woltomierza wzorcowego. Dlatego wskazania woltomierza wzorcowego i wbudowanego w zasilacz mogą różnić się i należy je zaokrąglać do jednego miejsca po przecinku.
Podobnie odbywa się kalibrowanie amperomierza. Przez zmianę obciążenia dołączonego do zacisków wyjściowych U1 (następnie U2) połączonego szeregowo z amperomierzem wzorcowym (multimetr) i obciążeniem np. rezystorem należy uzyskać kolejno około 0,5 A, 2 A i 4,5 A i potencjometrem R31 na module analogowym uzyskać wskazania zgodne ze wskazaniami przyrządu wzorcowego.
Po sprawdzeniu funkcjonowania wszystkich bloków pozostało zamontowanie podzespołów zasilacza w obudowie. Układy IC1 modułów analogowych oraz mostki Graetza modułu procesora powinny być zamocowane do radiatora. Może być to wspólny radiator, ale trzeba zastosować odpowiednie podkładki i tulejki izolacyjne. Projekt płytek drukowanych uwzględnia konieczność podwójnego prowadzenie przewodów pomiędzy modułami, aby zminimalizować spadki napięć na przewodach.
Jako obudowę zasilacza pozyskałem ze starego UPSa – tanio i elegancko, ale nie każdy UPS nada się do tego, ponieważ wyświetlacz LCD ma szerokość 96 mm a wiele UPSów dostępnych w handlu jest węższych.
Wykaz elementówModuł procesora Rezystory: (SMD 1206) Kondensatory: Półprzewodniki: Inne: Moduł analogowy Rezystory: (SMD 1206) Kondensatory: Półprzewodniki: Inne: |
Grzegorz Mazur