 Zaloguj
Zaloguj



Prezentowany sterownik silnika umożliwia płynną regulację prędkości obrotowej i kierunku obrotów silników bipolarnych (4-przewodowych) i unipolarnych (5- lub 6-przewodowych) za pomocą tego samego potencjometru. Zakres zmian prędkości wirowania podzielono na dwa podzakresy: 1...10 i 7...100 cykli na sekundę. Sterowanie mikrokrokowe odbywa się z rozdzielczością 1/64 lub 1/8 kroku. Sterownik może być zasilany napięciem 8...25 V DC, a prąd wyjściowy wynosi do 2 A/kanał (cewkę). Dodatkowo wyposażono go w funkcję pracy czasowej (czas regulowany płynnie w zakresie 0,5...70 s).
Schemat sterownika pokazano na rysunku 1. Stopień mocy zrealizowano układzie scalonym L298. Jego pracą steruje mikrokontroler ATtiny26, a zasilania dostarcza stabilizator 78M05. Poza tymi układami scalonymi zamontowano również kilka elementów, które nie wymagają szerszego opisu. Sekwencje pośrednie uzyskiwane są poprzez sterowanie uzwojeniami silnika przebiegiem PWM. Charakterystyka modulacji PWM ma kształt przebiegu trójkątnego. Takie rozwiązanie jest nieskomplikowane i skuteczne w większości wypadków, ale w sterownikach profesjonalnych jest stosowany kształt sinusoidalny.
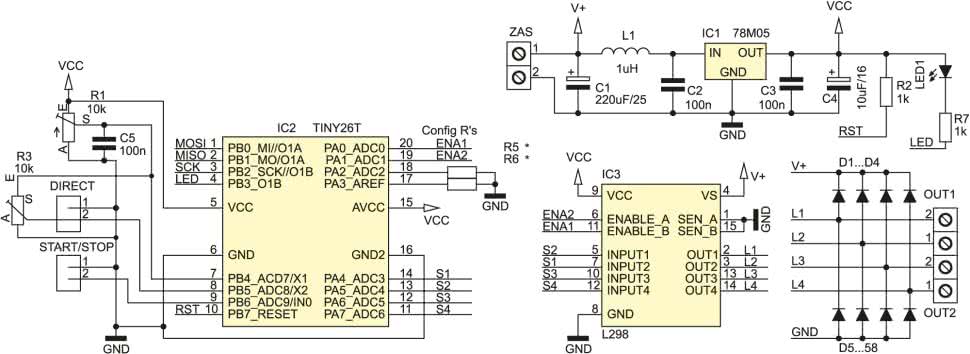
Na płytce znajdują dwa rezystory, które służą do konfigurowania układu. Rezystor R5 służy do wyboru zakresu prędkości obrotowej. Jeśli jest zamontowany, to jest wybrana wyższa częstotliwość sekwencji, ok. 7...100 cykli na sekundę (czyli pełnych okresów przebiegu w każdym kanale). Oraz układ pracuje z niższą rozdzielczością 1/8 kroku. Brak rezystora R5 oznacza niższą częstotliwość sekwencji, ok. 1...10 cykli na sekundę oraz wyższą rozdzielczość mikrokrokową 1/64. Rezystor R6 określa czy silnik w czasie zatrzymania będzie miał odłączone zasilanie – zatrzymanie statyczne (R6 zamontowany) czy zasilanie będzie utrzymane – zatrzymanie dynamiczne (brak R6). Przy zatrzymaniu statycznym jest możliwy prawie swobodny ruch wału silnika, w czasie zatrzymania dynamicznego wał silnika jest zablokowany w swym położeniu, ale przez cewki płynie prąd przez co silnik grzeje się.
Sterownik ma funkcję pracy czasowej. Jej załączenie następuje po zwarciu złącza START/STOP i trwa przez czas proporcjonalny do położenia potencjometru R1. Czas liczony jest od momentu zdjęcia zwory START/STOP. Jeśli zwora pozostanie założona, sterownik będzie pracował przez cały czas. Jeśli ustawiony będzie minimalny czas 0,5 s, to silnik będzie się zatrzymywał praktycznie zaraz po zdjęciu zwory, a więc jakby nie było funkcji czasowej.
Potencjometr R3 służy do regulacji kierunku i prędkości obrotowej – w środkowym położeniu silnik jest zatrzymany, przesuwanie potencjometru powoduje stopniowe zwiększanie prędkości obrotowej. Można nie montować potencjometru R3, zamiast tego do złącza DIRECT podawać napięcie z przedziału 0...5 V i w ten sposób sterować pracą silnika. Wtedy dla napięcia 2,5 V silnik będzie zatrzymany, wzrost napięcia powyżej 2,5 V spowoduje płynne zwiększanie obrotów w jedną stronę, a spadek napięcia spowoduje płynne zwiększanie obrotów w stronę przeciwną. Zamiast R3 można dołączyć joystick potencjometryczny, wtedy obroty silnika będą proporcjonalne do kierunku i siły wychylenia joysticka.
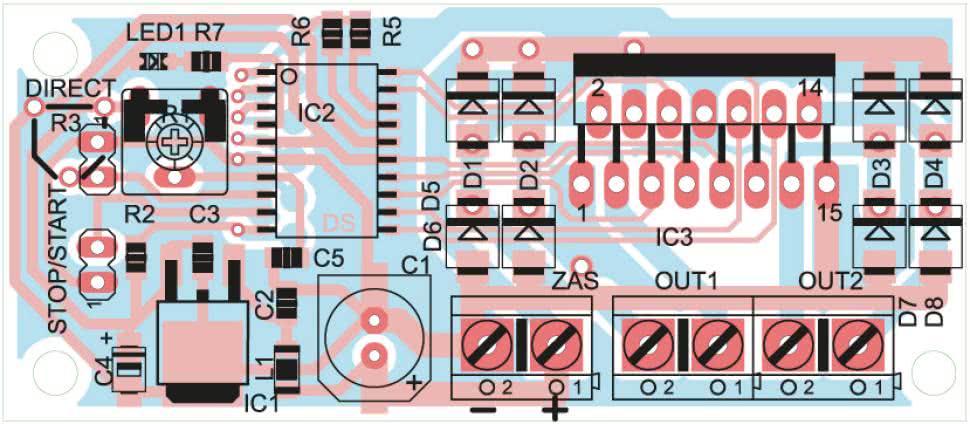
Układ jest zbudowany w większości z elementów SMD, dlatego montaż wymaga staranności i precyzji. W trakcie montażu należy podjąć decyzję odnośnie do montażu rezystorów R5 i R6. Jeśli silnik będzie pobierał prąd powyżej 0,5 A na kanał, układ L298 wymaga zastosowania dodatkowego radiatora. Prawidłowo zmontowany układ działa od razu.
Prototyp układu powstał do sterowania napędem wózka do kamery tzw Glidetrack i doskonale nadaje się do uzyskiwania bardzo niskich prędkości obrotowych silnika krokowego. Należy jednak pamiętać, że pomimo wysokiej rozdzielczości sterowania mikrokrokowego w niektórych silnikach ruch wału może nie być idealnie płynny i mogą występować niewielkie oscylacje.
KS
- R1, R3: 10...50 kΩ (potencjometr miniaturowy)
- R2, R7: 1 kΩ (SMD 0805)
- R5, R6: 1...100 Ω (SMD 0805)
- C1: 220 μF/25 V (SMD „D”)
- C2, C3, C5: 100 nF (SMD 0805)
- C4: 10 μF/10 V (SMD „A”)
- LED1: dioda LED SMD
- D1...D8: SS14
- IC1: 78M05 (DPACK)
- IC2: ATtiny26 (SMD)
- IC3: L298D
- L1: 1...10 μH (SMD 0805)
- START/STOP: goldpin 1×2+zworka
- DIRECT: goldpin 1×2 (opcjonalnie)
- ZAS, OUT1, OUT2: DG301/5-2














