 Zaloguj
Zaloguj



- rozwieranie styków przekaźnika elektromagnetycznego w zadanych interwałach,
- 16 czasów pracy urządzenia: od 1 minuty do 30 dni,
- 16 czasów wyłączenia urządzenia: od 1 sekundy do 1 godziny,
- ustawianie czasów w prostym, intuicyjnym menu na wyświetlaczu alfanumerycznym LCD 2×8,
- obciążalność styków przekaźnika: 8 A,
- przekaźnik ze stykami NC – przewodzą prąd nawet po wyłączeniu zasilania układu,
- zasilanie napięciem stałym 9…20 V, typowo 12 V.
Proste serwery albo routery sieciowe czasem potrafią się zawiesić, przy czym zazwyczaj wybierają na to najmniej odpowiednie momenty. Sytuacja nie jest kłopotliwa, jeżeli w pobliżu stale przebywa człowiek, który może szybko zareagować i wyzerować takie niesforne urządzenie. Ale zazwyczaj pracuje ono gdzieś w oddaleniu od miejsc stałego przebywania ludzi. Żeby taka awaria nie była zbyt dotkliwa, warto co jakiś czas najnormalniej w świecie wyłączyć zasilanie, poczekać na rozładowanie wszystkich kondensatorów i włączyć jeszcze raz, aby cała inicjalizacja rozpoczęła się od nowa.
Ten układ to nic innego, jak astabilny sterownik przekaźnika elektromagnetycznego, który ma co określony czas rozewrzeć jego styki na zadany uprzednio czas. Oba te czasy można zmieniać w bardzo szerokich granicach. Odmierzanie interwałów jest kontrolowane przez rezonator kwarcowy, więc nie ma obaw o to, że układ będzie mocno nieprecyzyjny.
Budowa i działanie
Schemat ideowy omawianego układu znajduje się na rysunku 1. Napięcie zasilające należy podłączyć do zacisków złącza J1. Jest ono filtrowane przez kondensator C1, zaś dioda D1 chroni układ przed uszkodzeniem w razie odwrotnego podłączenia źródła zasilania. Tym napięciem zasilane jest podświetlenie wyświetlacza LCD, cewka przekaźnika i prosty stabilizator liniowy US1 o napięciu wyjściowym 5 V. Kondensatory C2 i C3 zapobiegają jego wzbudzeniu, zapewniając stabilną pracę tego podzespołu.
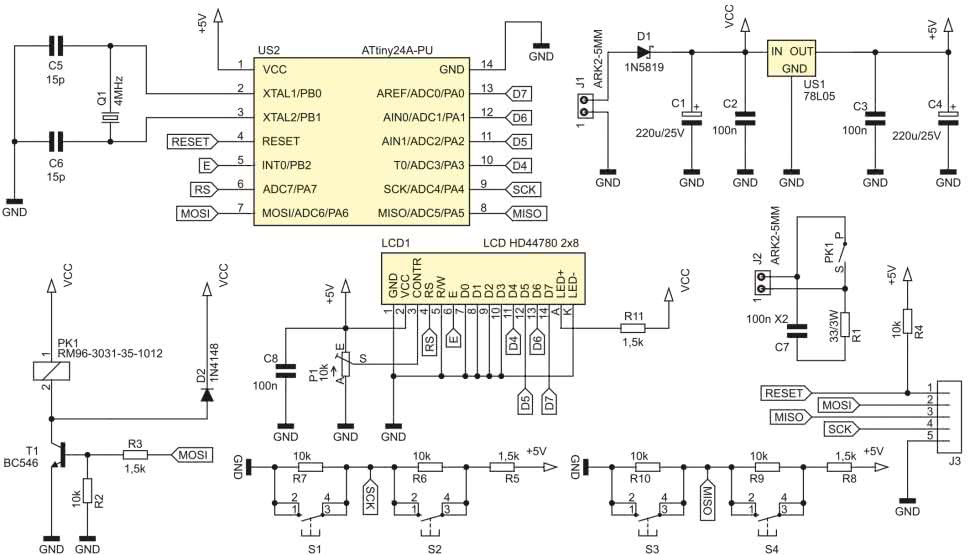
Mikrokontroler US2, czyli popularny ATtiny24A, steruje pracą całego układu. Dla dokładnego odmierzania czasu częstotliwość jego sygnału zegarowego jest stabilizowana zewnętrznym rezonatorem kwarcowym Q1. Kondensatory C5 i C6 ułatwiają wzbudzenie jego drgań. Przy wyprowadzeniach zasilania mikrokontrolera nie ma kondensatorów odsprzęgających zasilanie, ponieważ są one współdzielone z układem US1 – na płytce drukowanej elementy C3 i C4 znajdują się blisko zarówno US1, jak i US2.
Przekaźnik elektromagnetyczny PK1 ma jedną parę styków normalnie zamkniętych (NC). Dlatego ten układ przez większość czasu nie zasila jego cewki na podtrzymanie kotwiczki, co zmniejsza pobór mocy. Doprowadzenia do tych styków prowadzą do zacisków złącza J2, które należy potraktować jak zwykły łącznik, włączany w szereg z cyklicznie restartowanym urządzeniem. Elementy C7 i R1 tworzą gasik, redukujący iskrzenie styków przekaźnika i, tym samym, emisję zakłóceń elektromagnetycznych mogących zakłócić pracę układu.
Linie sygnałowe, którymi można zaprogramować mikrokontroler bez wymontowywania go z podstawki, zostały wyprowadzone na złącze J3. Są one współdzielone z innymi peryferiami. Przykładowo, linia MOSI jest wykorzystywana przez tranzystor T1 sterujący przekaźnikiem, dlatego podczas programowania mogą występować chaotyczne przełączenia stanu styków przekaźnika.
Do ustalania wartości czasów służą cztery przyciski. Z racji niedoboru liczby wyprowadzeń mikrokontrolera (sześć wykorzystuje wyświetlacz, dwie rezonator kwarcowy, do użycia są tylko dwie), ich stan jest odczytywany przez wbudowany przetwornik analogowo-cyfrowy.
Rezystory R5…R10 polaryzują wstępnie (w stanie „spoczynkowym”) te wejścia, a wciśnięcie przycisku powoduje silną zmianę potencjału, co jest odczytywane przez przetwornik. Rolą rezystorów R5 i R8 jest uchronienie źródła zasilania przed zwarciem w razie omyłkowego wciśnięcia dwóch przycisków znajdujących się w szeregu (S1 i S2 lub S3 i S4) jednocześnie. Popłynie wtedy prąd nieco większy od nominalnego, ale w żadnym wypadku o przeciążeniu nie będzie mowy.
Do wyświetlania nastaw, pozostałego czasu oraz stanu styków przekaźnika służy prosty wyświetlacz alfanumeryczny LCD o organizacji 2 wiersze × 8 kolumn. Jego kontrast reguluje się potencjometrem P1. Rezystor R11 ogranicza prąd diody podświetlającej do bezpiecznej dla niej wartości, a jednocześnie zmniejsza pobór mocy przez nią i redukuje zmęczenie wzroku wywołane zbyt jaskrawym światłem.
Montaż i uruchomienie
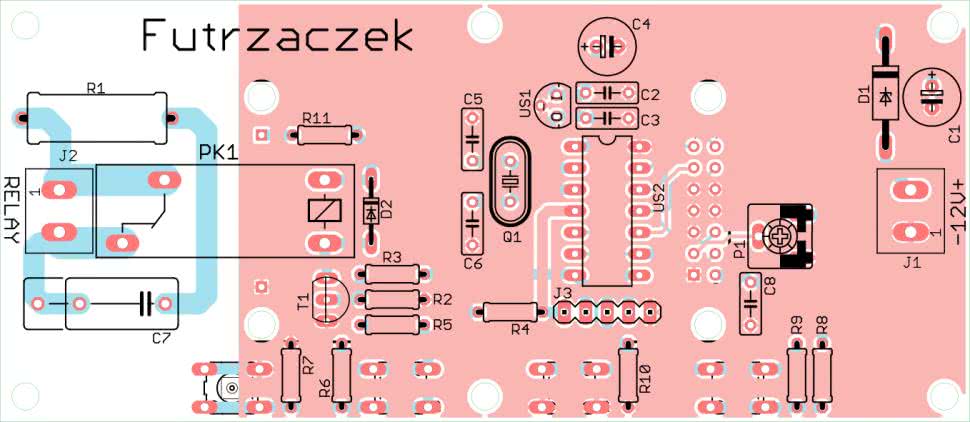
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 115×50 mm, której schemat został pokazany na rysunku 2. W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm. Dodatkowo, aby płytka nie uginała się podczas naciskania przycisków, na środku dłuższego boku (67,5 mm od brzegu) umieszczono dodatkowe otwory, również leżące 3 mm od krawędzi.
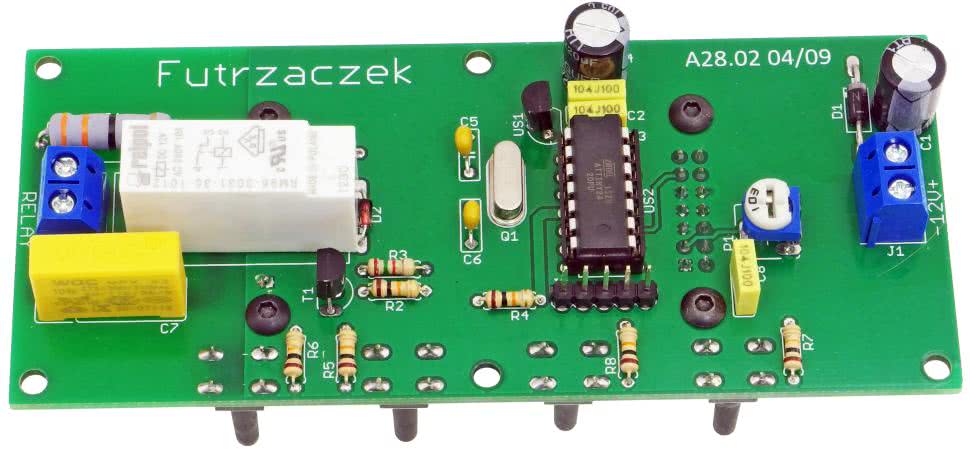
Montaż proponuję rozpocząć od elementów o najmniejszej wysokości obudowy, które znajdują się na wierzchniej stronie płytki, czyli rezystorów i diod. Pod mikrokontroler proponuję zastosować podstawkę. Ten etap montażu można zobaczyć na fotografii 1.
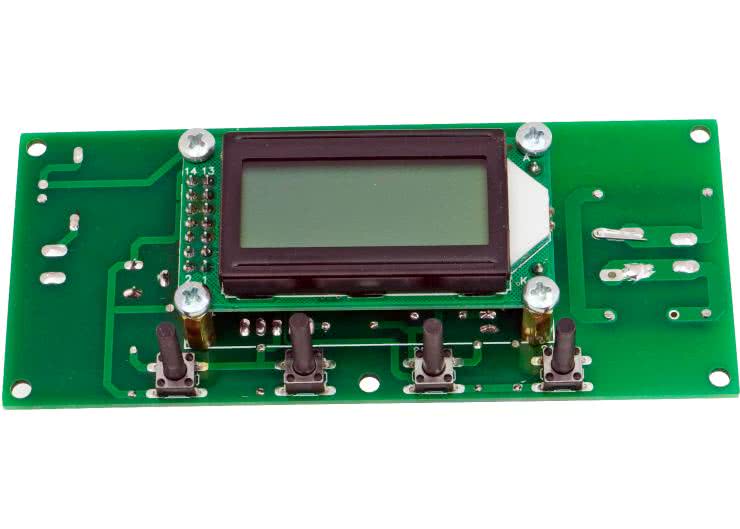
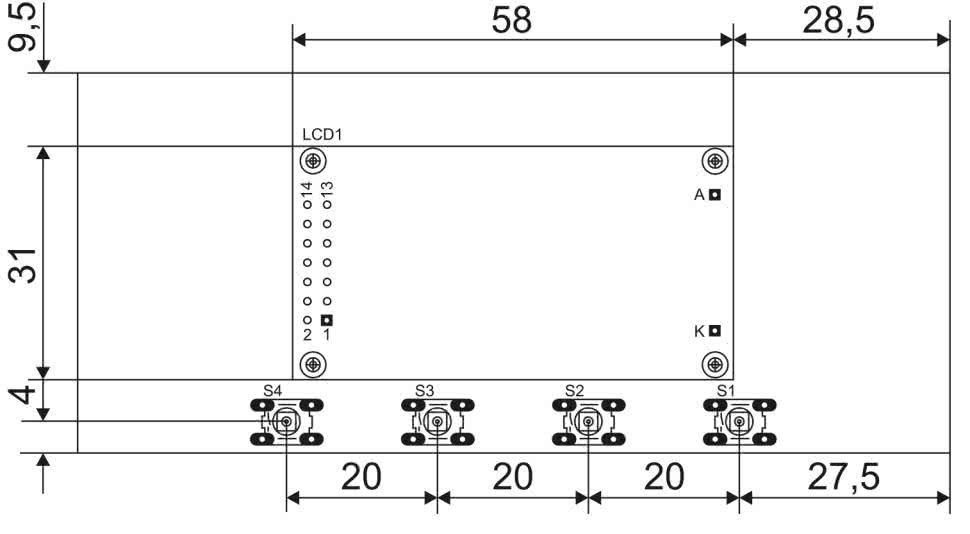
Na drugiej stronie płytki jest miejsce dla wyświetlacza LCD1 oraz czterech przycisków S1…S4. Ich lokalizację po przylutowaniu pokazuje fotografia tytułowa. Na samym końcu należy przykręcić wyświetlacz LCD za pomocą czterech tulei dystansowych oraz przylutować jego złącza. Warto lutowanie zostawić na sam koniec, po przykręceniu, aby ewentualny naddatek wysokości tulei mógł być skompensowany przez lekkie wystawanie złączy z powierzchni płytki – by część męska i żeńska wchodziły w siebie całkowicie. Rozmieszczenie przycisków oraz modułu wyświetlacza na powierzchni płytki znajduje się na rysunku 3, dzięki niemu łatwiej będzie wykonać płytę czołową obudowy dla tego urządzenia.
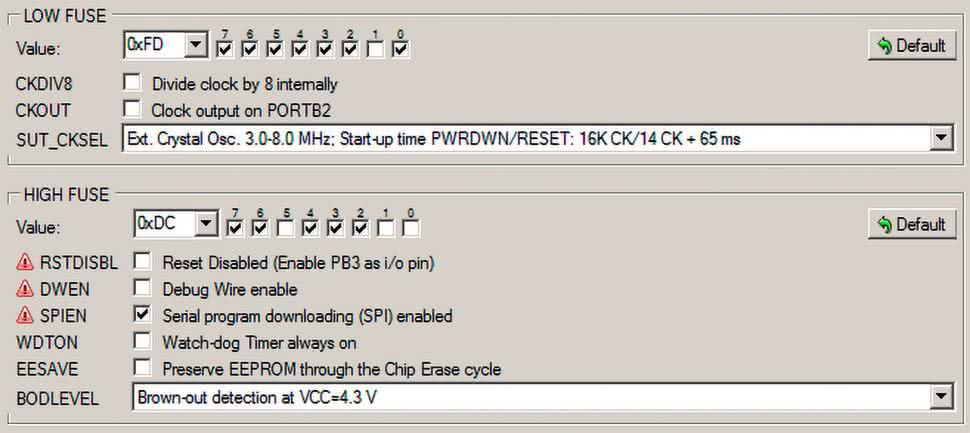
Na etapie uruchamiania jest konieczne zaprogramowanie pamięci Flash mikrokontrolera dostarczonym wsadem oraz zmiana jego bitów zabezpieczających. Oto ich nowe wartości:
Low Fuse = 0xFD
High Fuse = 0xDC
Szczegóły są widoczne na rysunku 4, który zawiera widok okna konfiguracji tychże bitów z programu BitBurner. W ten sposób zostanie uruchomiony generator dla rezonatora kwarcowego (o częstotliwości z przedziału 3…8 MHz) oraz Brown-Out Detector, który wprowadzi mikrokontroler w stan zerowania, jeżeli jego napięcie zasilające spadnie poniżej 4,3 V. To znacznie zmniejsza ryzyko zawieszenia się układu podczas uruchamiania.
Poprawnie zaprogramowany układ jest gotowy do działania po ustawieniu kontrastu wyświetlacza potencjometrem P1. Do zasilania powinno służyć napięcie stałe o wartości około 12 V, a dokładniej z przedziału 9…20 V. Takie granice uwzględniają zakres prawidłowej pracy samego przekaźnika (ze spadkiem napięcia na diodzie D1 i tranzystorze T1) w temperaturze 20ºC oraz kondensatorów elektrolitycznych. Warto, aby owe napięcie było dobrze filtrowane z tętnień, a najlepiej stabilizowane. Pobór prądu przy 12 V wynosi około 15 mA przy zwartych stykach przekaźnika oraz około 35 mA, kiedy cewka zostanie załączona – wtedy odcinane jest zasilanie dla urządzenia. Dzięki temu układ przez większość czasu pracuje z wyłączonym przekaźnikiem, co sprzyja energooszczędności.
Eksploatacja
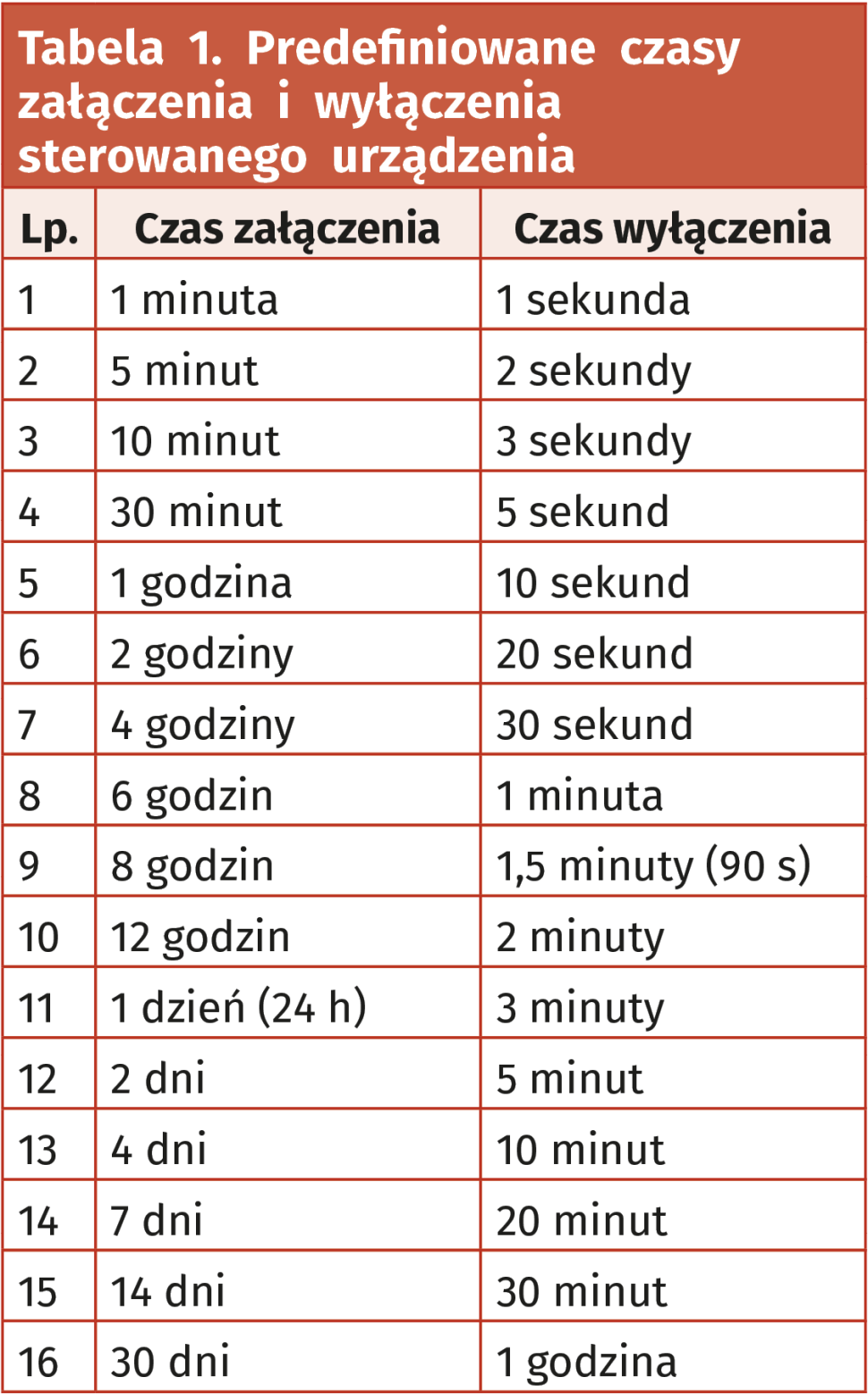
Mając świeżo zaprogramowany mikrokontroler, układ przyjmuje najniższe możliwe wartości czasów pracy i wyłączenia urządzenia. Są to, odpowiednio, 1 minuta i 1 sekunda. Użytkownik ma do wyboru po 16 różnych wartości, które może ustawiać oddzielnie. Zostały one zebrane w tabeli 1.
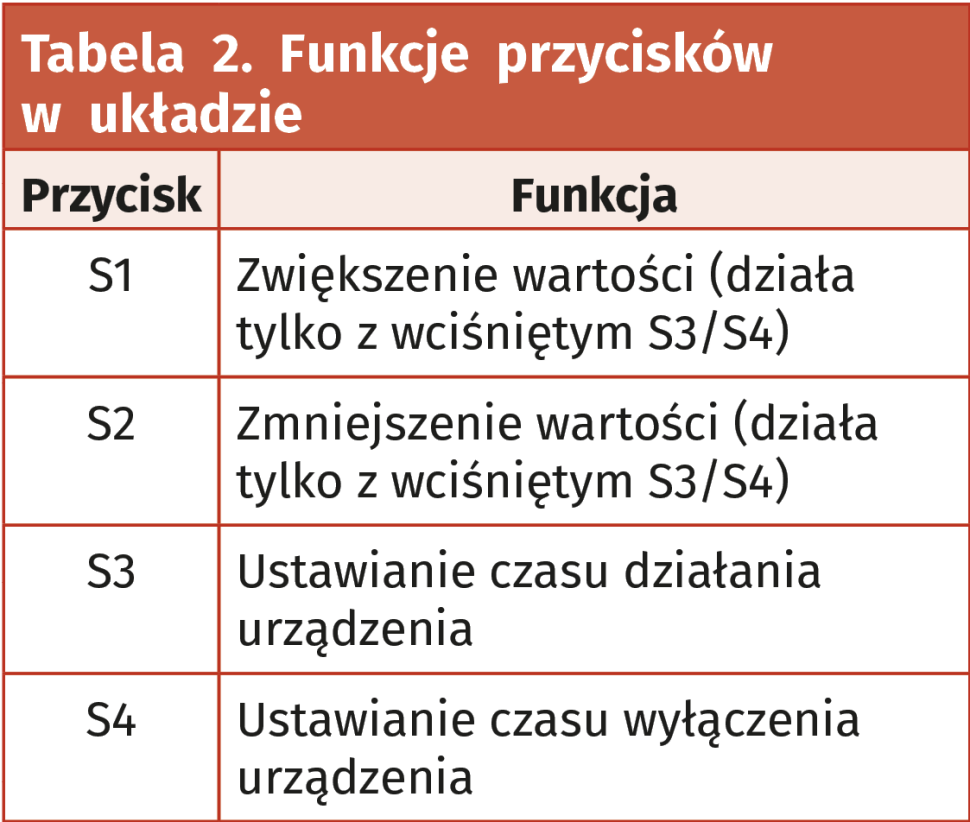
W układzie znajdują się cztery przyciski, które służą ustawianiu tych czasów. Funkcje tych przycisków zostały zebrane w tabeli 2. Aby wejść do regulacji, trzeba wcisnąć i przytrzymać S3 lub S4. Trzymając wciśnięty przycisk, można używać S1 i S2 do zmiany ustawienia – należy je wcisnąć każdorazowo, chcąc zmienić ustawienie, nie ma tutaj automatycznego przewijania. Zapis wybranego ustawienia do nieulotnej pamięci EEPROM następuje po zwolnieniu S3 lub S4. Konieczność wciśnięcia dwóch przycisków jednocześnie do zmiany nastaw służy jako proste zabezpieczenie przed przypadkowym przełączeniem.
Po włączeniu zasilania układ odczytuje zapisane nastawy i odlicza czas od początku, nie zapamiętuje odliczonego wcześniej czasu w momencie zaniku zasilania. Zawsze też rozpoczyna swoje działanie od zwartych styków przekaźnika. Odliczanie przebiega w dół, przez co widać, ile czasu jeszcze zostało – zmiana stanu styków przekaźnika następuje samoczynnie po doliczeniu do zera.
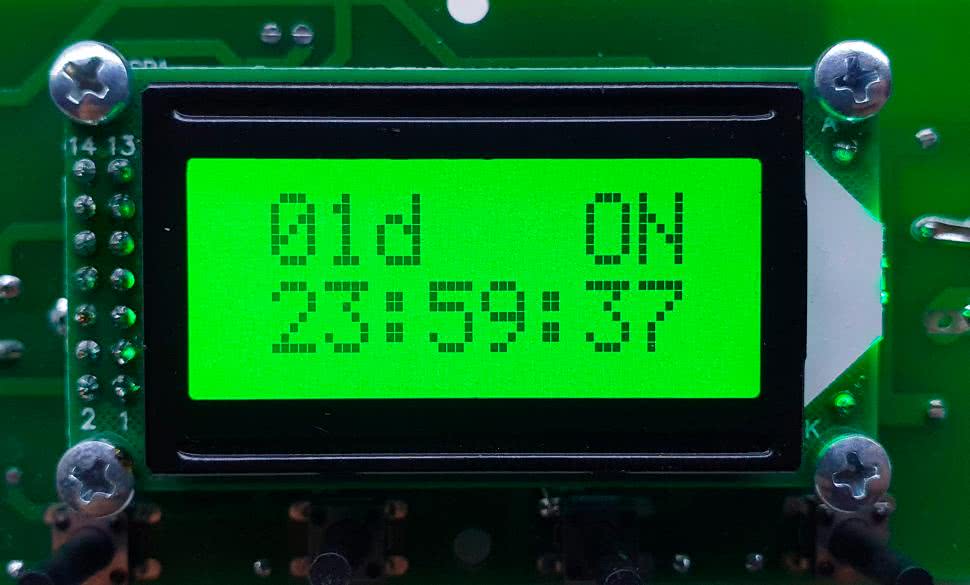

Widok ekranu w trakcie odliczania czasu działania jest na fotografii 2, zaś czasu wyłączenia na fotografii 3. W prawym górnym rogu widać aktualny stan urządzenia (ON/OFF) zasilanego poprzez wbudowany w układ przekaźnik. Na dole ekranu jest pozostały czas w formacie hh:mm:ss. Dodatkowo, na ekranie załączenia jest pokazywana również pozostała liczba dni (lewy górny róg). Po wciśnięciu przycisku ustawiania (S3 lub S4) pojawia się zadana ilość czasu do odmierzania oraz, dla odróżnienia od zwykłej pracy, literka „S” (od „set”) na górze ekranu.
Po każdorazowej regulacji czasu (czyli wciśnięcia S1 lub S2 w czasie trzymania wciśniętego S3 lub S4) układ zaczyna odmierzanie od nowa, zgodnie z nowymi nastawami. Zawsze też rozpoczyna od czasu załączenia (ON) sterowanego urządzenia. Wciskając tylko S3 lub S4, można podejrzeć całkowity czas zadany do odmierzania, bez ingerowania w ten, który jest aktualnie odmierzany.
Michał Kurzela, EP
- R1: 33 Ω 3 W
- R2, R4, R6, R7, R9, R10: 10 kΩ
- R3, R5, R8, R11: 1,5 kΩ
- P1: 10 kΩ montażowy leżący jednoobrotowy
- C1, C4: 220 μF 25 V raster 2,5 mm
- C2, C3, C8: 100 nF raster 5 mm MKT
- C5, C6: 15 pF raster 5 mm monolityczne
- C7: 100 nF MKP X2 305 V AC raster 15 mm
- D1: 1N5819
- D2: 1N4148
- LCD1: 2×8, zgodny z HD44780 np. LCD2X8 03
- T1: BC546
- US1: 78L05 TO92
- US2: ATtiny24A-PU DIP14
- J1, J2: ARK2/500
- J3: goldpin 5 pin męski 2,54 mm THT
- PK1: RM96-3031-35-1012
- Q1: 4 MHz niski
- S1…S4: microswitch 6×6 13,5 mm
- Jedna podstawka DIP14
- Złącze męskie i żeńskie goldpin 2×7 pin 2,54 mm
- Dwa złącza męskie i żeńskie goldpin 1 pin 2,54 mm
- Cztery tuleje dystansowe, gwint wewnętrzny M3 12 mm poliamid
- Osiem śrub M3 6 mm












