Zaloguj
Zaloguj



- sterowanie standardowymi sygnałami STEP i DIR,
- obsługa mikrokoku, aż do 1/256,
- dostarcza ciągłego prądu 2,5 A na każdą fazę (w szczycie 4 A),
- napięcie zasilania w zakresie 4,5…33 V.
W ofertach producentów dostępnych jest wiele kompleksowych rozwiązań driverów silników krokowych. Jednym z najnowszych opracowań jest układ TI o oznaczeniu DRV8424, którego strukturę wewnętrzną pokazano na rysunku 1. Zwiera on kompletny sterownik silnika krokowego z obsługą mikrokoku, aż do 1/256 oraz stopień mocy z dwoma mostkami H na tranzystorach MOSFET. Charakteryzuje się niewielkim napięciem nasycenia i jest zdolny do dostarczenia ciągłego prądu 2,5 A na każdy mostek (w szczycie 4 A), przy napięciu zasilania w zakresie 4,5...33 V.

Układ uzupełniono o sygnalizację stanów awaryjnych takich jak przegrzanie, przeciążenie, zwarcie i blokadę podnapięciową, sygnalizowane na wyjściu nFAULT. Wbudowane układy pomiaru prądu uzwojeń eliminują konieczność stosowania niskoomowych rezystorów pomiarowych. Prosta i typowa aplikacja wykorzystująca sygnały STEP/DIR ułatwia zastosowanie modułu w układach elektromechanicznych, a w szczególności w robotyce amatorskiej, także podczas modernizacji, gdzie sterowanie mikrokrokiem może podnieść dokładność pozycjonowania.
Budowa i działanie
Schemat modułu został pokazany na rysunku 2. Aplikacja układu DRV8424 jest bardzo prosta, moduł zasilany jest poprzez złącze PWR napięciem VM z zakresu 4,5...33 V, dobranym w zależności od zastosowanego silnika. Zasilanie odsprzęgane jest przez kondensatory CE1, C1 i C2. Należy pamiętać o odpowiedniej zewnętrznej pojemności filtrującej, zdolnej odebrać prądy hamowania z uzwojeń w docelowej aplikacji.
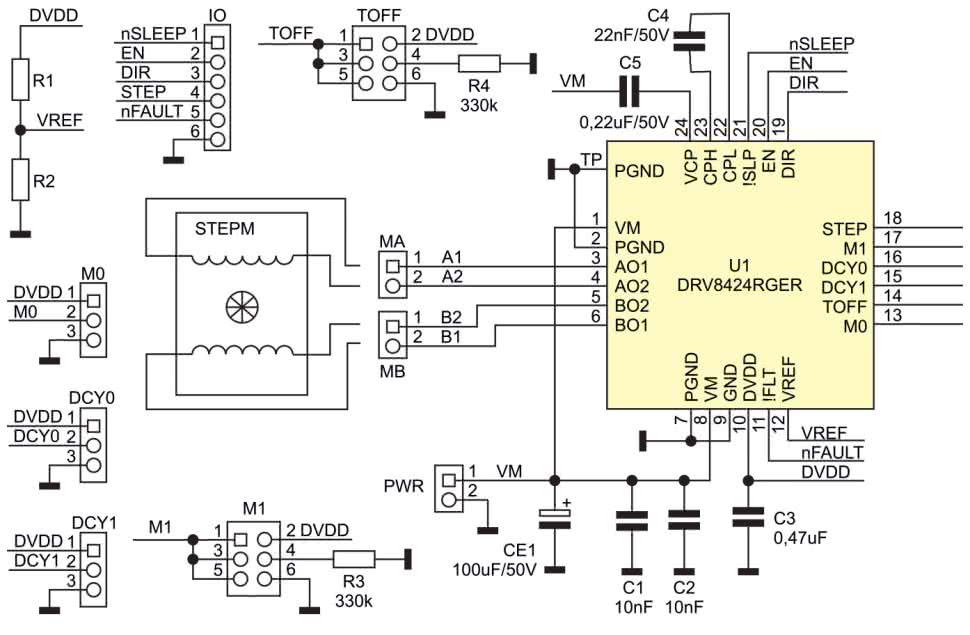
Z napięcia VM, poprzez wewnętrzną przetwornicę, generowane jest napięcie VCP potrzebne do zasilania drivera tranzystorów MOSFET mostka H oraz napięcie pomocnicze DVDD. Kondensatory C4 i C5 są kondensatorami pompy ładunkowej VCP.
Uzwojenia silnika podłączone są do wyjść mostków U1 poprzez złącza MA i MB. Dzielnik R1, R2 określa napięcie odniesienia VREF dla układu regulacji prądu uzwojeń. Maksymalne dopuszczalne napięcie VREF wynosi 3,3 V. Prąd uzwojeń określony jest wzorem:
Ifs=Vref/1,32 [A]
Podczas doboru dzielnika należy uwzględnić prąd wyprowadzenia Vref wynoszący ok. 8,25 µA. W modelu R1=27 kΩ, R2=10 kΩ, co ustala prąd uzwojeń na ok. 675 mA. Podczas doboru prądu należy pamiętać, że maksymalny osiągnięty rzeczywisty prąd może zostać ograniczony dopuszczalną mocą strat i temperaturą struktury DRV8424.
Na złącze IO wyprowadzone są sygnały sterujące pracą układu U1:
- nSLEEP – stan niski wprowadza układ w tryb uśpienia i kasuje błędy;
- EN – stan wysoki aktywuje wyjścia układu;
- DIR – określa kierunek obrotów silnika;
- STEP – wejście impulsów kroków, aktywne zboczem narastającym. Maksymalna częstotliwość taktowania to 500 kHz. Maksymalna wartość rzeczywista częstotliwości określona jest parametrami silnika i obciążenia;
- nFAULT – wyjście typu OD sygnalizujące błąd układu.
Układ sterowania układu DRV8424 konfigurowany jest zworami:
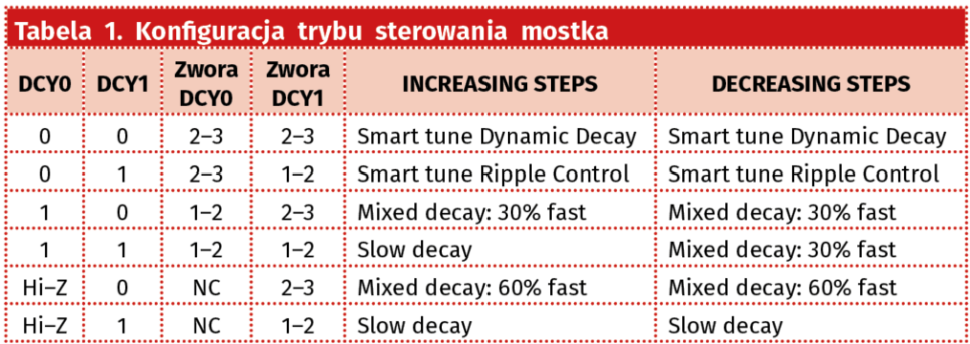
- DCY0/1 – określającymi tryb sterowania mostkiem H wpływającym na szybkość zaniku prądu uzwojeń w trybie Smart/Fast/Slow/Mixed lub w trybie kontroli tętnień, zgodnie z tabelą 1. Odpowiednie sterowanie tranzystorami mostka H umożliwia zanik prądu uzwojeń w trybie przeciwprądu (Fast – reverse), recyrkulacji (Slow – brake) lub mieszanym (30/60% Fast);
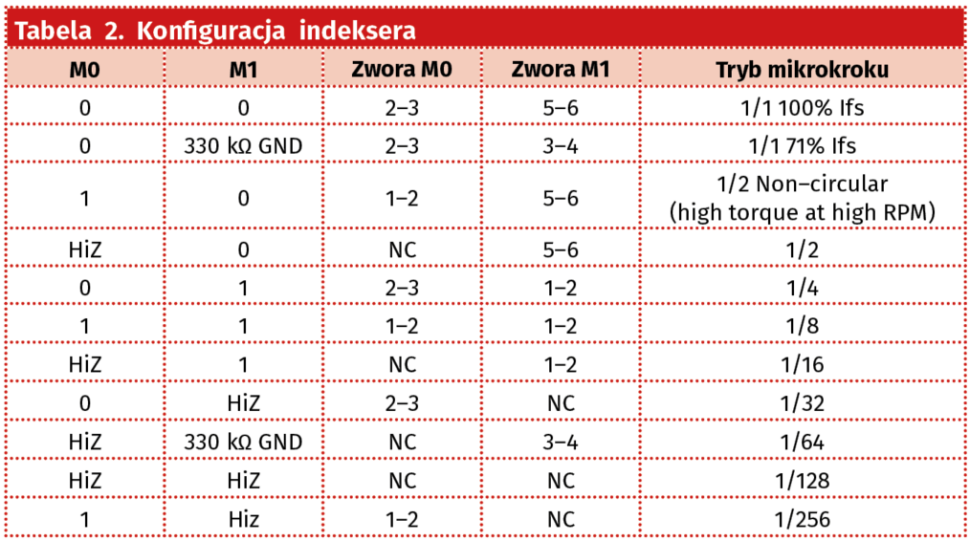
- M0/M1 – określającymi tryb pracy indeksera, zgodnie z tabelą 2;
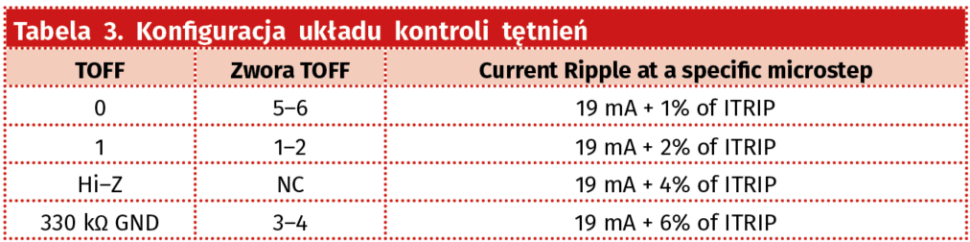
- TOFF – określającą tryb kontroli tętnień prądu uzwojeń, zgodnie z tabelą 3.
Układ DRV8424 akceptuje zmiany nastaw indeksera i trybu pracy w locie, co ułatwia elastyczne sterowanie silnikiem.
Montaż i uruchomienie
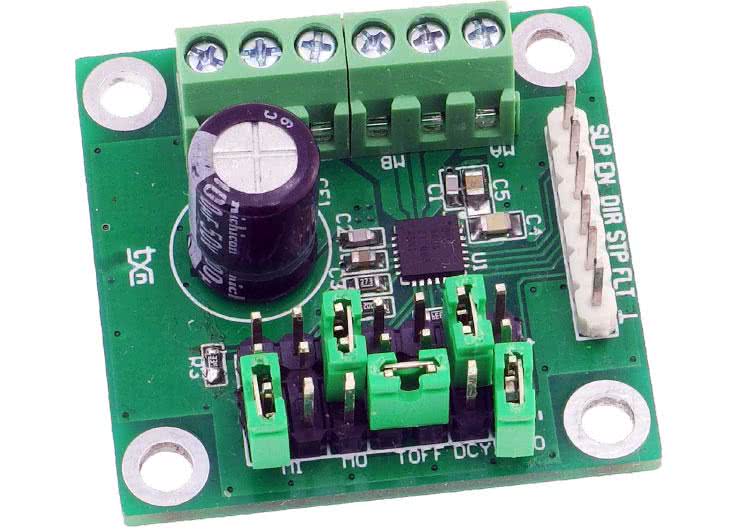
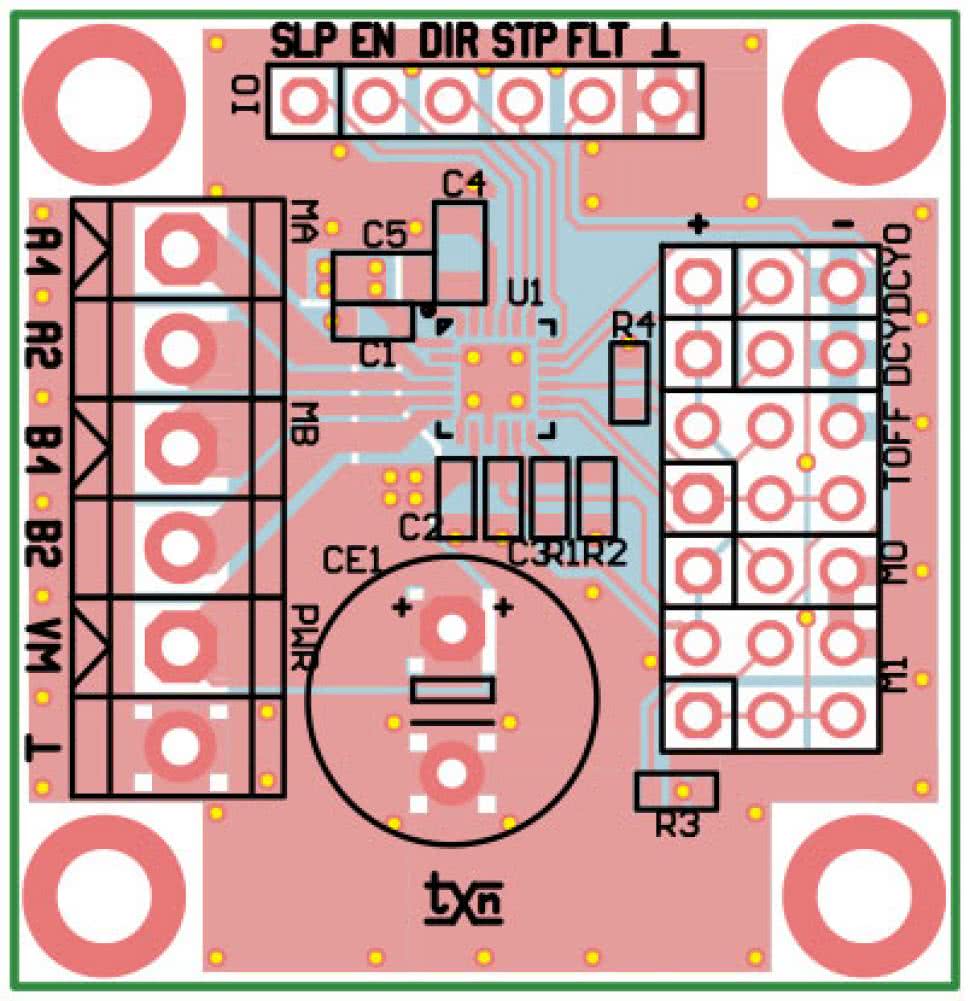
Minimoduł zmontowany jest na dwustronnej płytce drukowanej, której schemat wraz z rozmieszczeniem elementów został pokazany na rysunku 3. Sposób montażu jest klasyczny i nie wymaga opisu, należy tylko pamiętać, aby poprawnie przylutować pad termiczny.
Sprawdzenie układu po doborze dzielnika R1, R2 odpowiadającego znamionowemu prądowi uzwojeń silnika i zapewnieniu odpowiednio wydajnego zasilania, sprowadza się do ustawienia zwór DCY0/1, M0/M1, TOFF określających tryb pracy indeksera i układu sterowania mostkiem H.
Po doprowadzeniu do złącza IO sygnału STEP z regulowanego generatora sygnału prostokątnego (3,3...5 V), określeniu kierunku obrotów DIR, aktywacji układu poprzez ustalenie stanu wysokiego EN i nSLEEP silnik powinien zacząć się obracać, o ile częstotliwość sygnału STEP i ustawianie indeksera nie przekraczają maksymalnej prędkości obrotowej silnika.
Pomimo prostego sterowania układem sterownika polecam zapoznanie się z kartą katalogową DRV8424 oraz notami aplikacyjnymi, gdzie w najdrobniejszych szczegółach opisane są tryby sterowania, które w artykule z oczywistych przyczyn opisane są w sposób skrócony.
Adam Tatuś, EP
- C1, C2: 10 nF SMD0603
- C3: 0,47 µF SMD0603
- C4: 22 nF SMD0805
- C5: 0,22 µF/50 V SMD0805 ceramiczny
- CE1: 100 µF/50 V kondensator Low ESR 10 mm
- U1: DRV8424RGER (VQFN24)
- DCY0, DCY1, M0, M1, TOFF: złącze SIP3 2,54 mm + zwory
- IO CONN: złącze SIP6 2,54 mm
- MA MB, PWR CONN: złącze DG381-3.5-2