 Zaloguj
Zaloguj



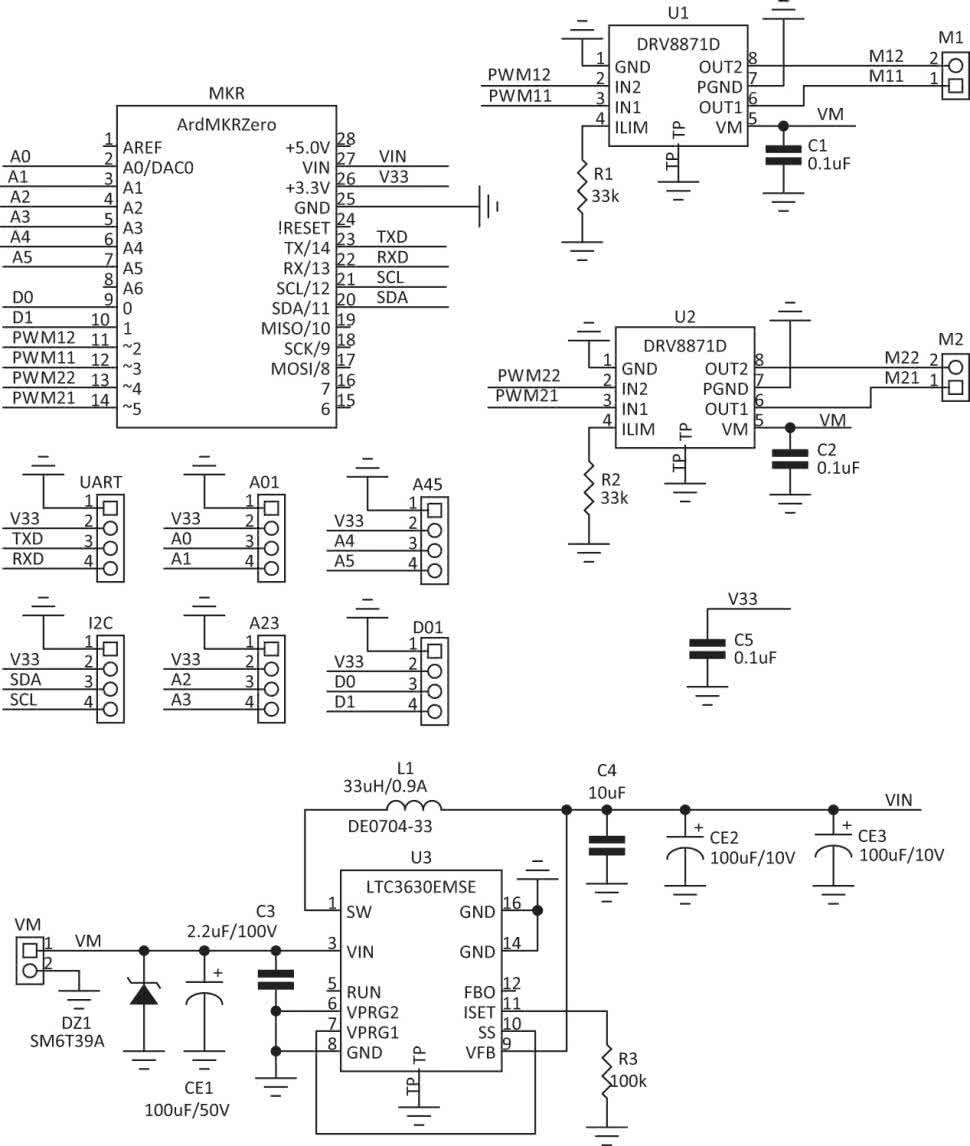
Schemat ideowy sterownika silników pokazano na rysunku 1. Zbudowano go w oparciu o specjalizowany driver DRV8871 firmy Texas Instruments. Zawiera on wszystkie niezbędne dla sterowania silnikiem szczotkowym prądu stałego elementy: dwa półmostki MOSFET z niskim Rdson i bezstratnym układem pomiaru prądu silnika, niewymagającym zewnętrznych elementów, logikę zabezpieczającą i pompę ładunku do sterowania tranzystorów mocy, wbudowany układ zabezpieczeń przeciążeniowych i termicznych oraz wejściową logikę sterującą. Wbudowany czujnik prądu silnika nie wymaga zewnętrznego rezystora pomiarowego, ale w dalszym ciągu możliwa jest zmiana maksymalnego prądu uzwojeń poprzez dobór rezystora podłączonego do wyprowadzenia Ilim. W prototypie prąd ustalono na 2 A, co odpowiada RIlim=33 kV. Minimalna wartość rezystora ustalona jest na 15 kV. Sterowanie kierunkiem obrotów odbywa się w konwencji L/R za pomocą wejść IN1/IN2 zgodnie z tabelą zaczerpniętą z dokumentacji układu i pokazaną na rysunku 2.

Napięcie zasilania silników VM doprowadzone poprzez złącze VM zasila układy U1/U2, kondensator CE1 filtruje zasilanie. Należy pamiętać, że to wartość minimalna i w zewnętrznym zasilaczu powinien być zespół kondensatorów o pojemności zdolnej do zapewnienia stabilnego zasilania układu. Rezystory R1, R2 powinny być dobrane do konkretnego modelu silnika. Aby nie komplikować zasilania układu, do zasilania MKR_Zero wykorzystano napięcie zasilania silników (np.: z pakietu 2S-6S LiPo). Na płytce wbudowano impulsową przetwornicę napięcia o szerokim zakresie napięcia wejściowego (6–32 V), U3 typu LTC3630. Dla modelowych wartości elementów, układ dostarcza napięcia 5 V/200 mA, co wystarcza z zapasem dla płytki i kilku typowych czujników.
Do złącz GPIO doprowadzone jest 6 portów analogowych A0…A5, dwie linie cyfrowe D0, D1 oraz UART (Serial1) oraz I2C. Ze względu na ograniczoną ilość miejsca złącza GPIO mają raster 2 mm. Są to typowe zł?cza JST/4?pin. ącza JST/4 pin. Uwaga! Sygnały GPIO MKR_Zero są zgodne ze standardem 3,3 V. Doprowadzenia napięcia 5 V spowoduje uszkodzenie GPIO.
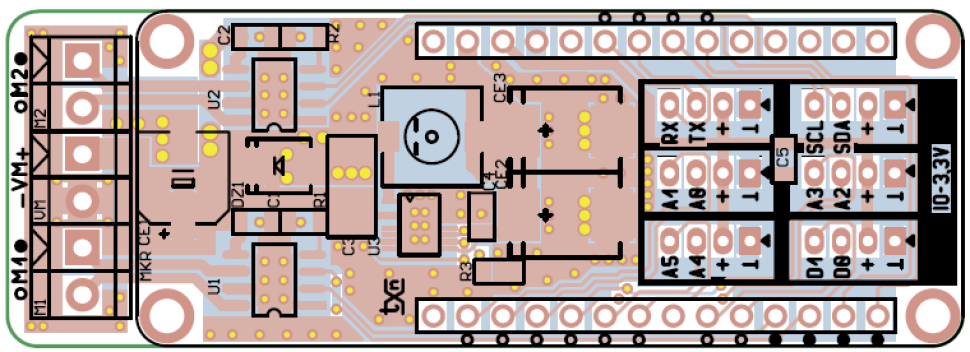
Układ zmontowany jest na niewielkiej dwustronnej płytce drukowanej, której schemat montażowy pokazano na rysunku 3. Ze względu na oszczędność miejsca, złącza montowane są od spodu płytki, aby zachować niewielką szerokość modułu MKR. Montaż nie wymaga opisywania. Należy jedynie poprawnie przylutować pady termiczne układów U1, U2. W wypadku „forsownej” pracy modułu warto układy driverów wyposażyć w niewielkie radiatory SO8 przyklejone klejem termoprzewodzącym.
Adam Tatuś, EP
- R1, R2: 33 kΩ/1% (SMD 0805)
- R3: 100 kΩ/1% (SMD 0805)
- C1, C2, C5: 0,1 μF (SMD 0805)
- C3: 2,2 μF/100 V (SMD 1812)
- C4: 10 μF (SMD 0805)
- CE1: 100 μF/50 V (elektrolityczny Low ESR R=6,3 mm)
- CE2, CE3: 100 μF/10 V (SMD „C”)
- DZ1: SM6T39A (Transil)
- U1, U2: DRV8871DDAR (SO8)
- U3: LTC3630EMSE (MSOP16)
- L1: 33 μH/0,9 A (dławik DE0704-33)
- M1, M2, VM: złącze DG381-3.5-2 (2 pin)
- MKR: złącze Arduino 14 pin, 2,54 mm, żeńskie












