Zaloguj
Zaloguj



- Sterowanie unipolarnym silnikiem krokowym (5 lub 6 przewodów).
- Praca krokowa lub półkrokowa.
- Dwa zakresy regulacji prędkości obrotowej.
- Potencjometr do płynnej regulacji prędkości obrotowej.
- Możliwość wybór stanu zatrzymania: statyczne lub dynamiczne.
- Możliwość wyboru sposobu sterowania – impulsowe lub stanowe.
- Zasilanie: 7...24 V DC.
- Obciążalność: do 1 A/kanał (cewkę).
Schemat ideowy sterownika silnika pokazano na rysunku 1. Jest on zasilany napięciem stałym z zakresu 7...24 V doprowadzonym do złącza X1. Dioda D1 stanowi zabezpieczenie przed niewłaściwą polaryzacją napięcia wejściowego. Napięcie zasilające jest doprowadzone stabilizatora IC1 (78L05), który dostarcza zasilania +5 V dla mikrokontrolera.
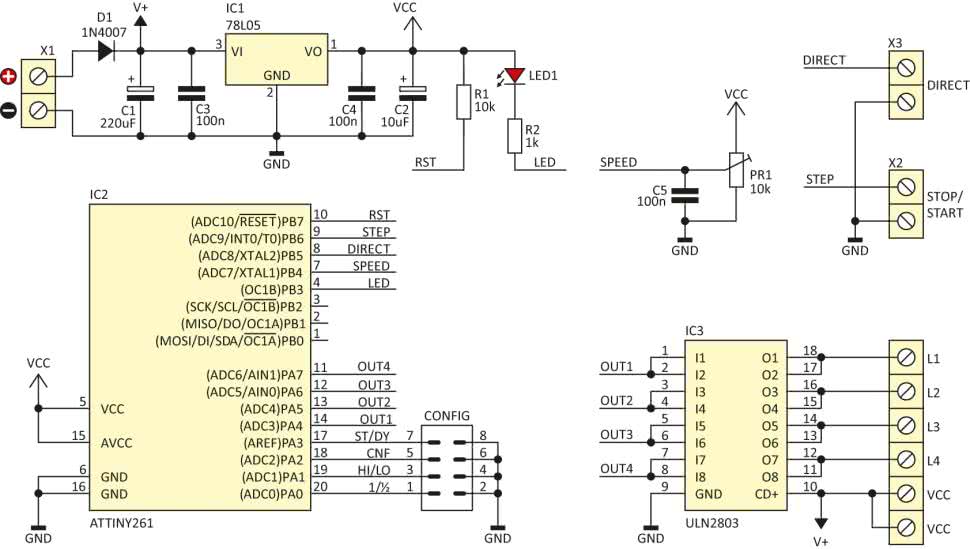
Pracą sterownika zarządza mikrokontroler IC2 ATtiny261 taktowany wewnętrznym sygnałem zegarowym. Stopień wykonawczy zbudowano z użyciem drivera ULN2803, w którym w celu zwiększenia wydajności prądowej połączono ze sobą równolegle po dwa drivery. Do regulacji prędkości obrotowej służy potencjometr PR1. Dioda LED1 sygnalizuje stan pracy układu.
Zworki CONFIG służą do konfiguracji sposobu pracy sterownika:
- Zworka „1/½” służy do wyboru trybu pracy silnika. Brak zwory – praca krokowa, zworka założona – praca półkrokowa. Praca krokowa to najprostszy sposób sterowania silnika krokowego, praca półkrokowa to dodanie w sekwencji sterującej stanów pośrednich, w praktyce powoduje bardziej płynną pracę silnika, ale zwiększa pobór prądu o około 50...60%.
- Zworka HI/LO służy do wyboru zakresu regulacji prędkości obrotowej. Zworka założona – niższy zakres regulacji. Zworka zdjęta – wyższy zakres regulacji.
- Zworka CNF służy do wybór sposobu sterowania. Brak zwory – sterowanie impulsowe. Zworka założona – sterowanie stanowe; przy sterowaniu stanowym zwarcie lub rozwarcie złącz sterujących powoduje zmianę kierunku obrotów lub zatrzymanie silnika. Natomiast sterowanie impulsowe zmienia kierunek obrotów przy każdorazowym krótkim zwarciu złącza DIRECT i zatrzymuje lub uruchamia silnik przy każdorazowym krótkim zwarciu wyprowadzeń STOP/START, możemy wtedy sterować układem za pomocą mikroprzełączników dołączonych do tych złącz.
- Zworka ST/DY służy do wyboru sposobu zatrzymania silnika. Brak zwory – zatrzymanie statyczne. Zworka założona – zatrzymanie dynamiczne. Podczas zatrzymania silnika sygnałem na złączu STOP/START, przy ustawieniu na dynamiczne, na wyjściu sterownika utrzymuje się stan z momentu zatrzymania czyli załączone są odpowiednie cewki silnika, w praktyce powoduje to zablokowanie osi silnika w jednym punkcie ale powoduje pobór znacznego prądu i nagrzewanie uzwojeń. Zatrzymanie statyczne powoduje odłączenie zasilania silnika w stanie zatrzymania, w praktyce powoduje to prawie swobody ruch osi silnika i układ pobiera jedynie niewielki prąd spoczynkowy.
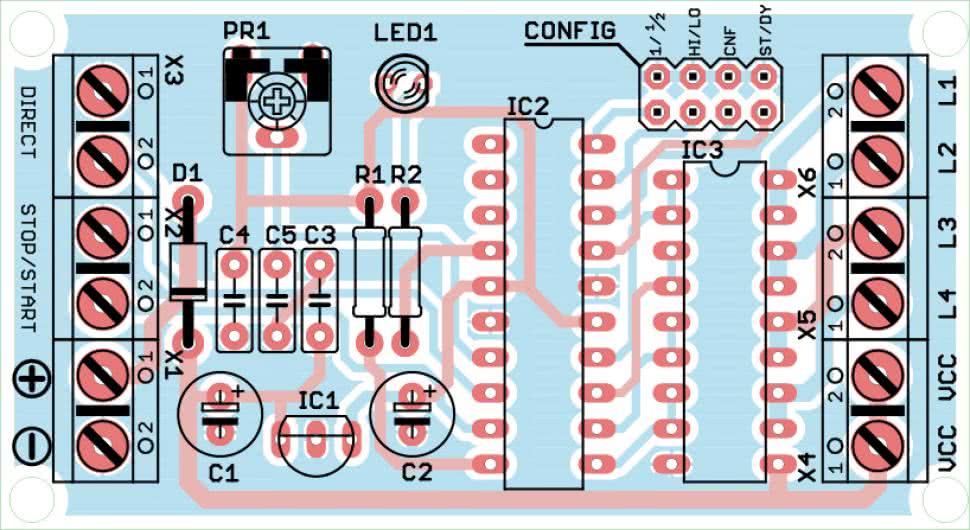
Sterownik silnika należy zmontować na płytce, której schemat montażowy pokazano na rysunku 2. Montaż jest typowy i nie powinien przysporzyć problemów. Po zmontowaniu sterownik jest od razu gotowy do pracy. Wszystkie zmiany w konfiguracji sterownika dokonane przy pomocy zworek CONFIG, będą aktywne dopiero po wyłączeniu i ponownym włączeniu napięcia zasilania.
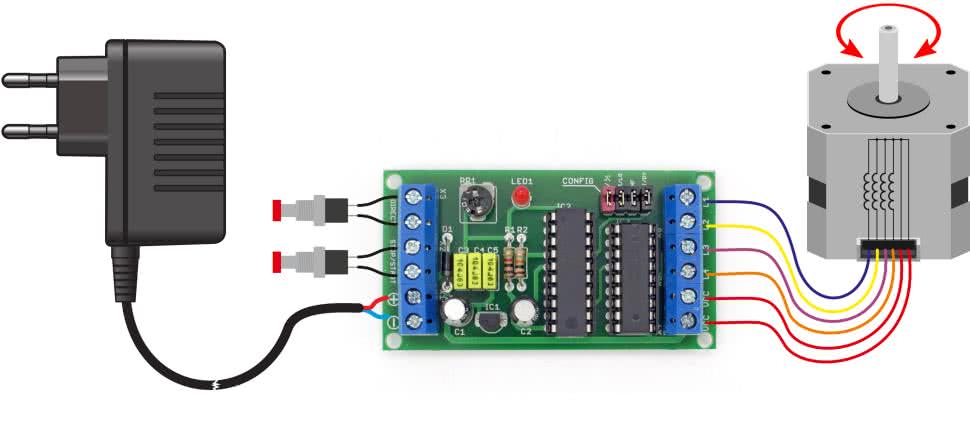
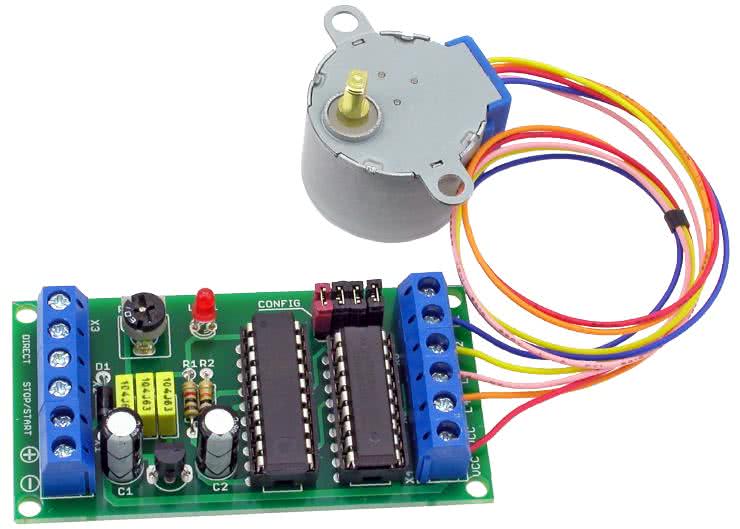
Sposób połączenia układu z typowym silnikiem został pokazany na rysunku 3.
EB
- R1: 10 kΩ
- R2: 1 kΩ
- PR1: 10 kΩ (potencjometr montażowy)
- C1: 220 μF
- C2: 10 μF
- C3…C5: 100 nF
- D1: 1N4007
- LED1: dioda LED
- IC1: 78L05
- IC2: ATtiny261 (zaprogramowany)
- IC3: ULN2803
- CONFIG: goldpin 2×4 + zworka 4 szt.
- X1…X6: złącze DG301-5.0/2