 Zaloguj
Zaloguj



Projekt sterownika opisanego w artykule realizuje następujące zadania:
- Steruje 4-fazowym silnikiem krokowym.
- Umożliwia płynną regulację prędkości obrotowej i zmianę kierunku obrotów.
- Realizuje funkcję zatrzymania silnika standstill.
Schemat ideowy sterownika silnika krokowego pokazano na rysunku 1. Sterownik zbudowano z użyciem trzech układów scalonych typu 4000 oraz czterech MOSFETów mocy. Układ jest taktowany za pomocą generatora impulsów prostokątnych zbudowanego z bramek NAND z wejściem Schmitta. Częstotliwość pracy tego generatora jest określona sumą rezystancji R2+PR1 oraz pojemności kondensatora C1 i może być regulowana w szerokim zakresie za pomocą potencjometru PR1. Fragment układu z bramkami EXOR i przerzutnikami J-K tworzy licznik modulo 4, na którego wyjściach w takt impulsów zegarowych przesuwa się poziom wysoki.
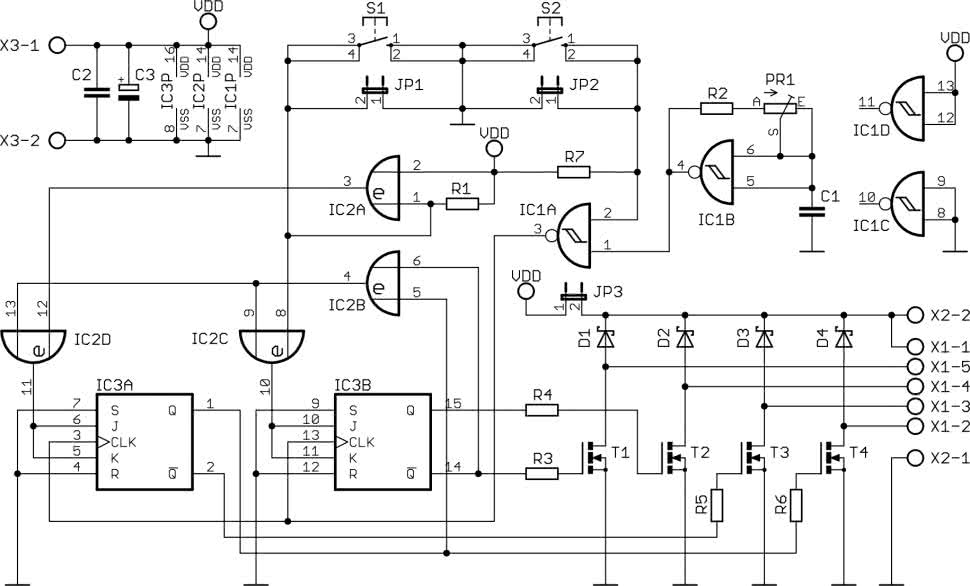
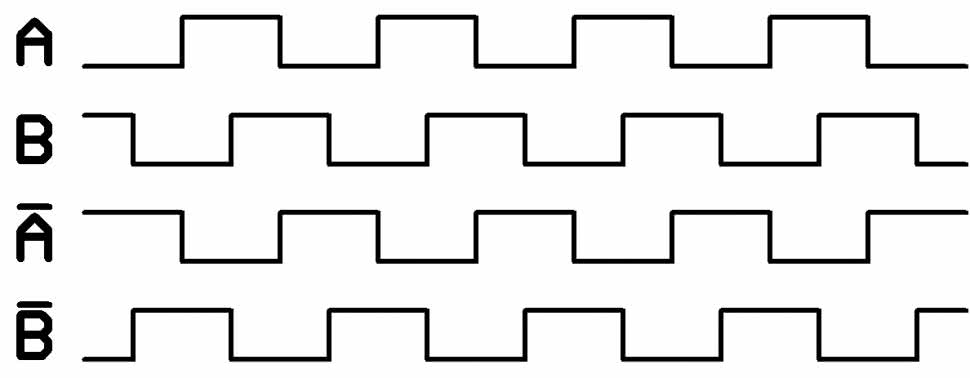
Przełącznik S1 (JP1) służy do zmiany kierunku pracy licznika, a tym samym do zmiany kierunku obrotów silnika. Za pomocą przełącznika S2 (JP2) można zatrzymywać i uruchamiać silnik. Cewki czterofazowego silnika krokowego zasilane są za pośrednictwem czterech tranzystorów MOSFET (T1…T4). Zastosowanie w układzie modelowym tranzystorów dużej mocy typu BUZ11 jest rozwiązaniem gwarantującym poprawną pracę silników o bardzo dużej mocy. Na rysunku 2 pokazano przebiegi na złączu X2, do którego dołączane są uzwojenia unipolarnego silnika krokowego.
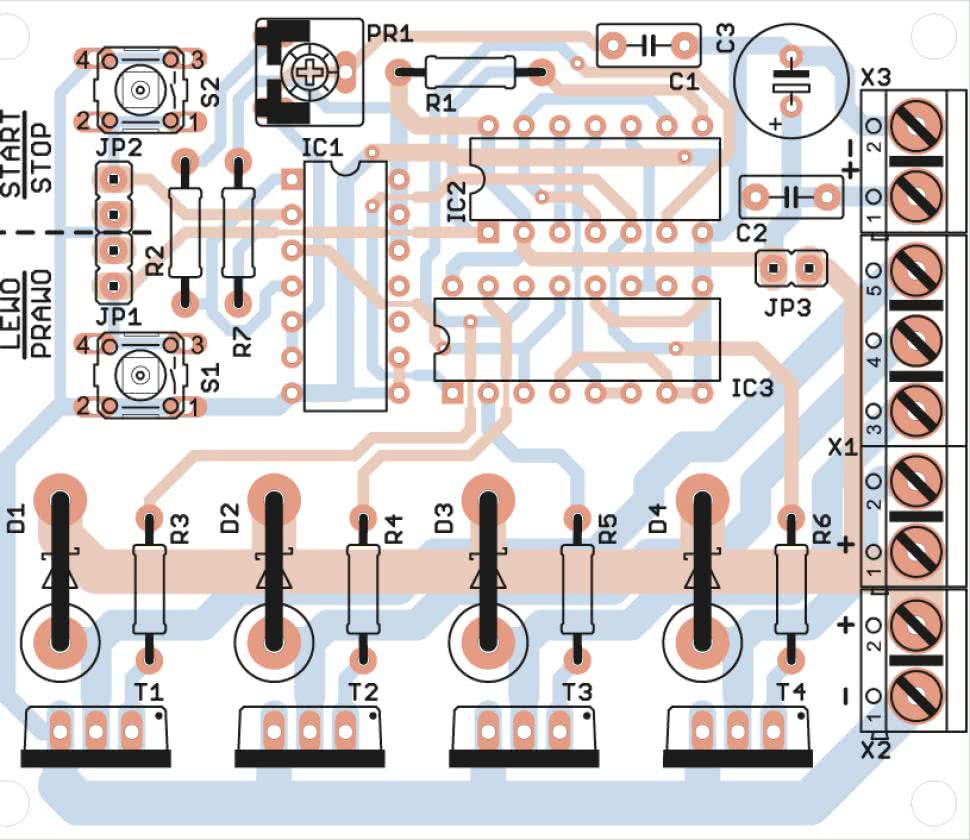
Układ należy zmontować na płytce drukowanej, której schemat montażowy zamieszczono na rysunku 3. Montaż należy rozpocząć od wlutowania w płytkę rezystorów i podstawek pod układy scalone, a zakończyć na złączach i tranzystorach mocy. Zwarcie złącz JP1 i JP2 pełni taką samą funkcję, jak wciśnięcie przycisków S1 i S2, więc można dołączyć do nich przyciski zwierne i oddalić je od płytki sterownika. Płytkę zaprojektowano w taki sposób, aby można było zainstalować tranzystory na wspólnym radiatorze, uprzednio izolując je podkładkami silikonowymi i tulejkami izolacyjnymi od siebie i radiatora. Ścieżki, przez które będzie płynął znaczny prąd zostały na płytce drukowanej odkryte i warto je solidnie pocynować.
Po zmontowaniu układu trzeba bardzo starannie skontrolować, czy podczas lutowania nie powstały zwarcia punktów lutowniczych. Układ zmontowany ze sprawnych elementów nie wymaga uruchamiania. Należy jednak wspomnieć o sposobie dołączenia zasilania oraz uzwojeń silnika do płytki sterownika. W przypadku zasilania układu sterującego i silnika tym samym napięciem, które mieści się w przedziale od 5…15 V i nie przekracza poboru prądu powyżej 1 A, należy założyć Jumper JP3 i zasilanie dołączyć do złącza X3. Jeżeli parametry zasilania silnika krokowego nie mieszczą się w granicach napięcia zasilania części sterującej, należy zdjąć zworę JP3, do złącza X3 doprowadzić napięcie zasilające mieszczące się w granicach podanych powyżej, natomiast do złącza X2 doprowadzić zasilanie zgodne z parametrami silnika krokowego.
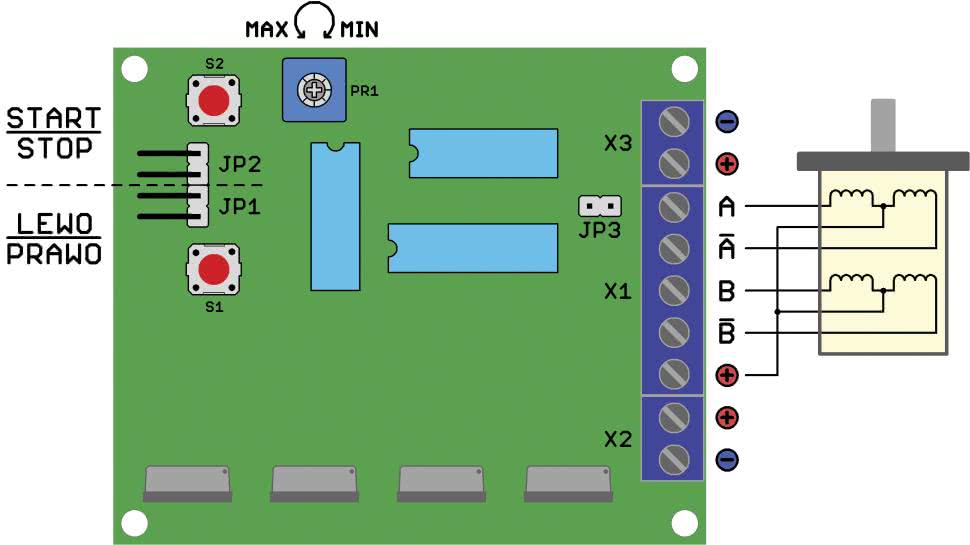
Sposób dołączenia silnika krokowego unipolarnego pokazano na rysunku 4.
Jakub Sobański
mavin@op.pl
- R1, R7: 1 kΩ
- R2: 10 kΩ
- R3…R6: 100 Ω
- PR1: 100 kΩ
- C1: 330 nF
- C2: 100 nF
- C2: 470 µF
- D1…D4: 1N5822
- IC1: 4093
- IC2: 4070
- IC3: 4027
- T1…T4: BUZ11
- X1: ARK2/5 mm + ARK3/5 mm
- X2, X3: ARK2/5 mm
- S1, S2: microswitch
- JP1: 2×1 goldpin + zworka
- JP2, JP3: 2×1 goldpin












