Zaloguj
Zaloguj




Licznik SMT – Signal Measurement Timer
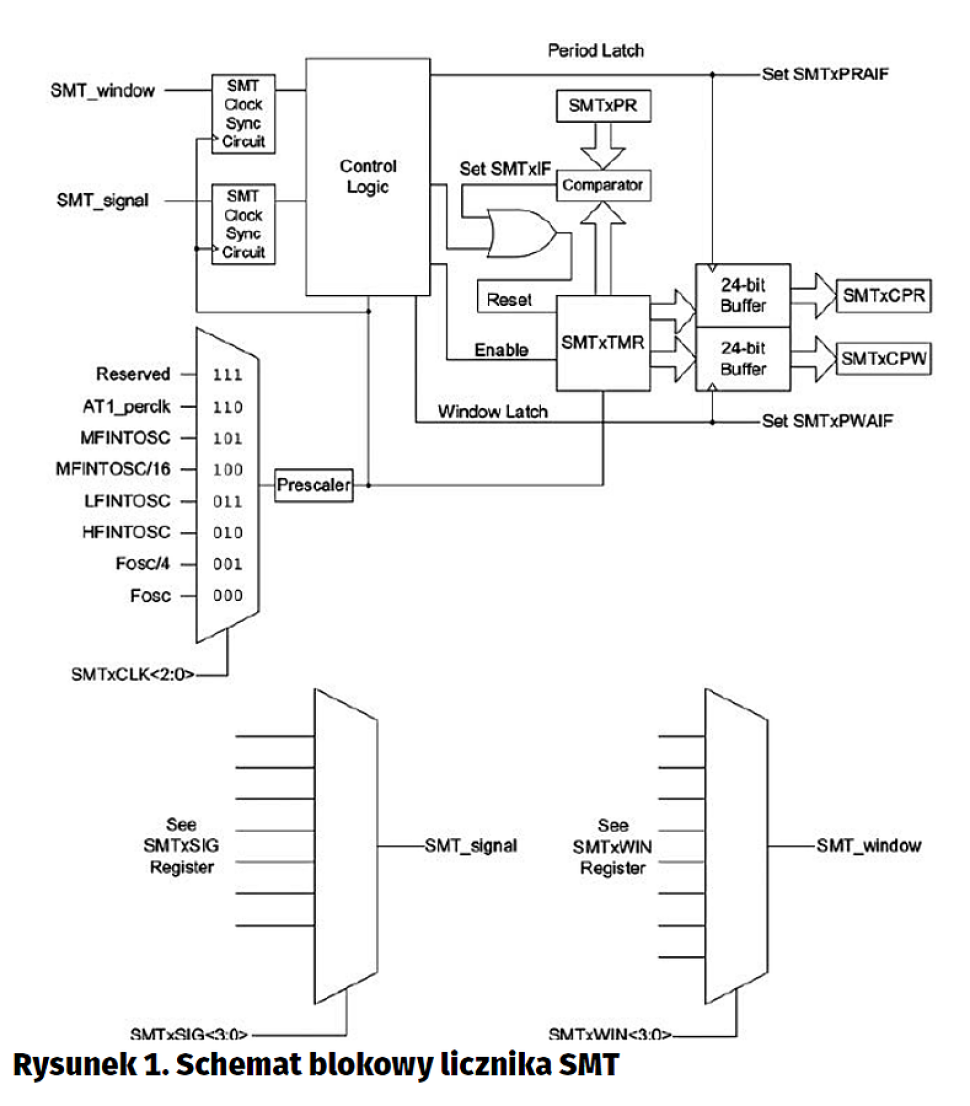
Moduł SMT jest 24-bitowym licznikiem konfigurowanym do pomiarów szerokości impulsu, częstotliwości, współczynnika wypełnienia, różnicy czasu pomiędzy zboczami dwóch sygnałów. Schemat blokowy tego licznika pokazano na rysunku 1. Ma on 3 wejścia: SMT_window, SMT_signal i źródła referencyjnego sygnału zegarowego. Na każdym z tych wejść jest umieszczony multiplekser umożliwiający wybranie jednej z kilku możliwości. Wbudowany rejestr 24-bitowy (period register) i komparator cyfrowy mogą generować zdarzenia typu równe wartości (match), przekroczony czas (timeout). Możliwość podawania sygnałów z różnych źródeł na 3 wejścia powoduje, że SMT może pracować w aż 11 unikalnych trybach!
Źródłem zegarowego sygnału referencyjnego są wewnętrzne oscylatory RC lub zewnętrzny oscylator kwarcowy. W celu dokładnych pomiarów częstotliwości referencyjne powinny się charakteryzować dokładnością i stabilnością. W takim wypadku trzeba wybrać oscylator kwarcowy Primary Oscillator z zewnętrznym rezonatorem kwarcowym lub tryb EC (External Clock). W trybie EC można taktować mikrokontroler z zewnętrznego źródła tak dokładnego i stabilnego, jak to potrzebne. W wielu zastosowaniach wystarczy dokładność wbudowanego oscylatora RC. Dla oscylatora HFINTOSC gwarantowana dokładność przy napięciu zasilania 2,3…5,5 V i w temperaturze otoczenia 0…60°C wynosi ±2%, ale w temperaturze ujemnej już tylko ±5%. Wszystkie wymienione tryby pracy można konfigurować za pomocą wtyczki MCC MPLAB Code Configurator. Moduł SMT może pracować w następujących trybach:
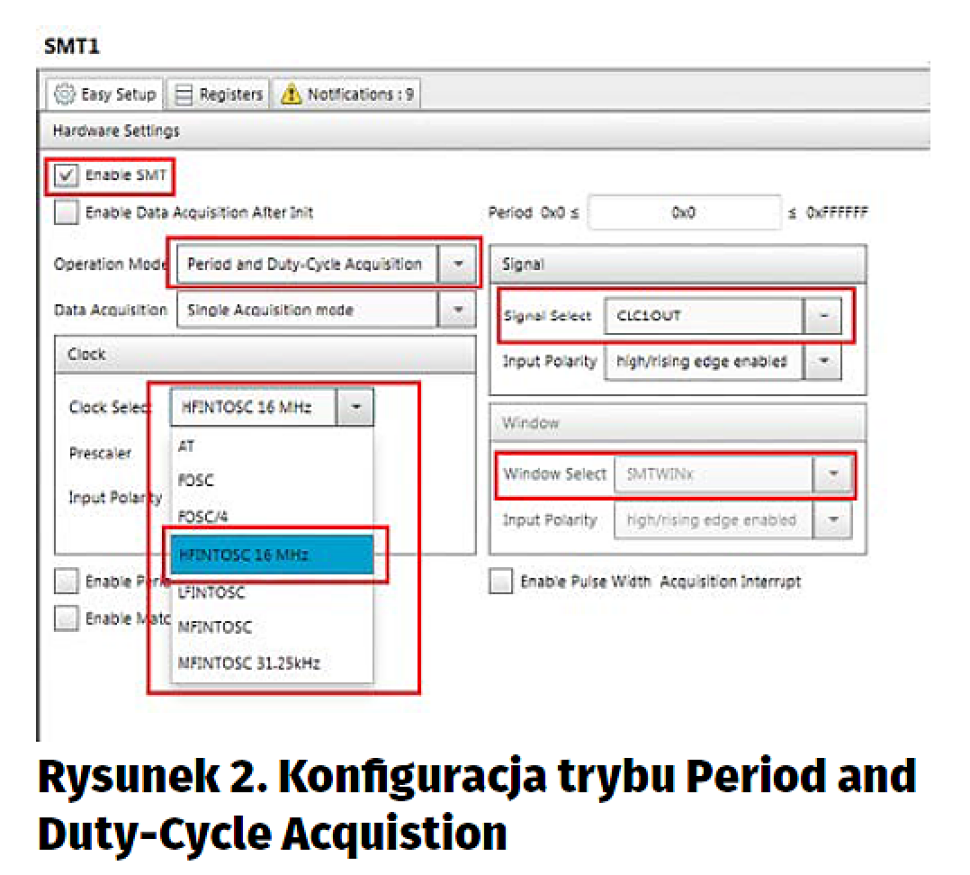
- Odblokowanie modułu SMT.
- Wybór trybu Period and Duty – okno Operation Mode.
- Data Acquistion (pomiar pojedynczy lub cykliczny).
- Źródło sygnału referencyjnego – okno Clock.
- Źródło sygnału mierzonego– okno Signal.
Można tez odblokować zgłaszanie przerwania po zakończeniu każdego z cykli pomiaru. Jest to doskonała metoda pomiaru współczynnika wypełnienia sygnału PWM. Taki pomiar może być użyty, na przykład, do odczytywania niektórych typów sensorów z wyjściem PWM, lub w innych układach automatyki. Na listingu 1 zamieszczono procedurę inicjalizacji modułu SMT1 skonfigurowanego, jak to zostało pokazane na rys. 2.
Listing 1. Konfiguracja modułu SMT1 do procy w trybie Period And Dutu Cycle Acquistion
void SMT1_Initialize(void)
{
/* WPOL high/rising edge enabled; STP rolls over to 24’h000000;
SPOL high/rising edge enabled; EN enabled;
SMT1PS 1:1 Prescaler; CPOL rising edge; */
SMT1CON0 = 0x80;
/* SMT1REPEAT Single Acquisition mode;
SMT1MODE Period and Duty-Cycle Acquisition;
SMT1GO disabled; */
SMT1CON1 = 0x02;
// SMT1CPWUP SMT1CPW1 update complete; SMT1CPRUP SMT1PR1 update complete; RST SMT1TMR1 update complete;
SMT1STAT = 0x00;
// SMT1CSEL HFINTOSC 16 MHz;
SMT1CLK = 0x02;
// SMT1WSEL CLC2OUT;
SMT1WIN = 0x0A;
// SMT1SSEL CLC1OUT;
SMT1SIG = 0x07;
// SMT1PR 0;
SMT1PRU = 0x00;
// SMT1PR 0;
SMT1PRH = 0x00;
// SMT1PR 0;
SMT1PRL = 0x00;
}
Tryb High and Low Time Measurent. Ten tryb jest podobny do opisywanego wcześniej i jego zastosowanie jest takie samo. Różnica polega na tym, że zamiast mierzyć długość okresu, mierzy się długość poziomu niskiego Toff. Wynik pomiaru Toff jest zapisywany w rejestrze CPR.
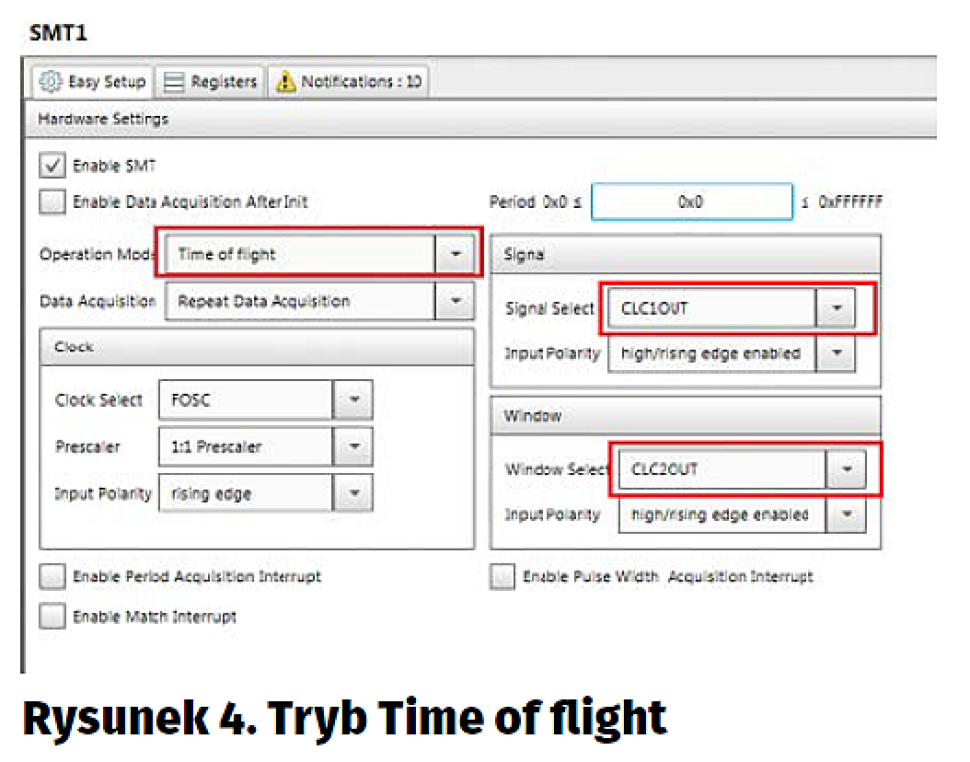
Tryb Time of Flight Measurement. W aplikacjach, w których jest konieczny precyzyjny pomiar czasu pomiędzy dwoma różnymi zdarzeniami, można użyć trybu Time of Flight Measurement. Dwa mierzone sygnały są doprowadzone do wejść SMT_signal i SMT_window. Wejście sygnałowe może inicjować zliczanie impulsów zegara referencyjnego, a wejście „okna” kończy zliczanie sygnału referencyjnego. Zakończenie zliczania może zgłaszać przerwanie. Przerwanie może też być zgłaszane, jeśli zliczana wartość jest równa zapisanej w rejestrze SMT1PR. Na rysunku 4 pokazano konfigurację trybu Time of Flight mierzącego czas pomiędzy zdarzeniami (zboczami) na wyjściach modułów CLC1 i CLC2. Zbocza określające wystąpienie zdarzenia są konfigurowane w oknie Input Polarity.
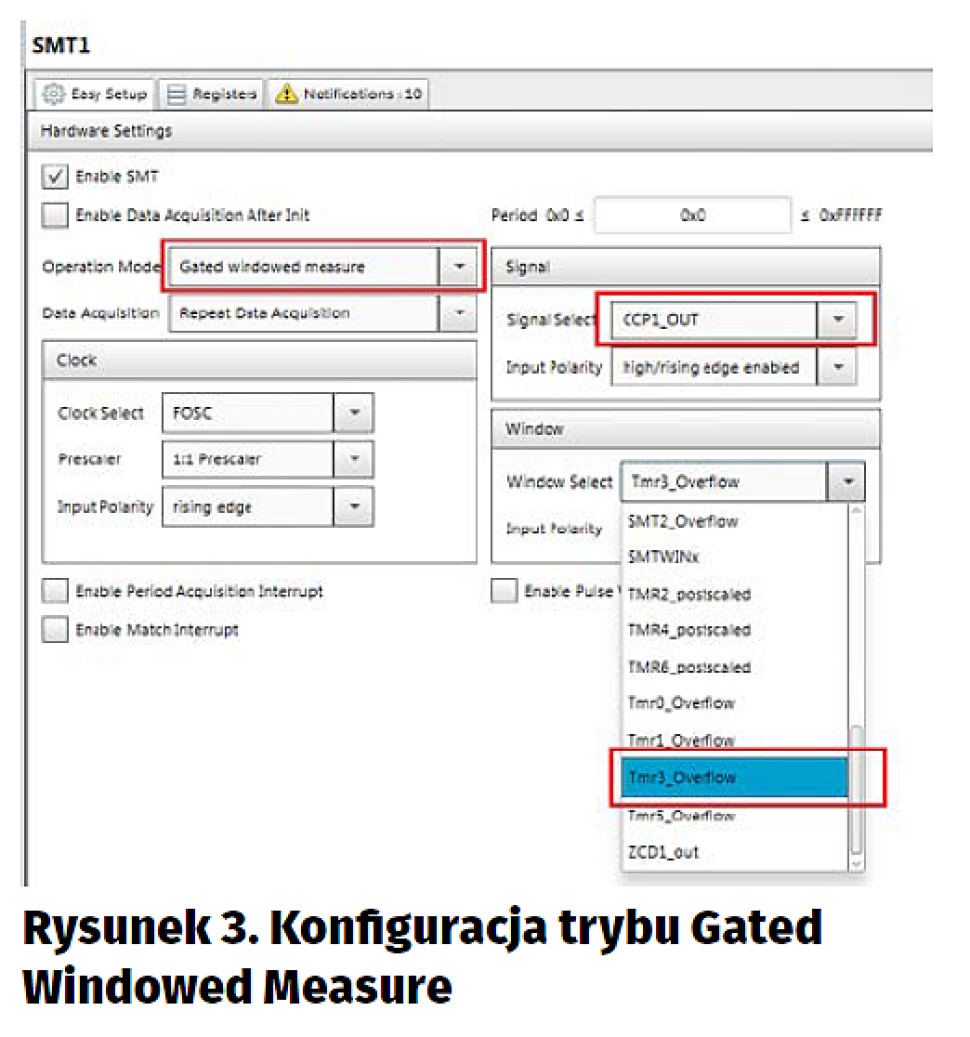
Tryb Windowed Measure. Tryb Windowed Measure jest przeznaczony do pomiaru czasu trwania okresu sygnału podawanego na wejście SMT_window. Każde narastające zbocze uruchamia zliczanie impulsów zegara referencyjnego. Kolejne narastające zbocze zeruje licznik impulsów i cykl pomiaru zaczyna się od nowa. Podwójne buforowanie umożliwia odczytanie wyniku poprzedniego pomiaru w trakcie kolejnego cyklu. Koniec każdego cyklu może zgłosić przerwanie. Możliwe jest tez zgłoszenie przerwania, kiedy licznik zliczanych impulsów jest równy zawartości rejestru SMT1PR.
Tryb Gated Timer. Tryb Gated jest spotykany w standardowych timerach mikrokontrolerów. Różnica polega na większej rozdzielczości pomiaru (24 bity). Kiedy sygnał na wejściu SMT_signal jest ustawiony, to licznik zlicza impulsy referencyjne. Wynik pomiaru jest zapisywany do rejestru CPW.
Tryb Capture. Moduł SMT procuje jak standardowy licznik (najczęściej 16-bitowy) w połączeniu z modułem CCP procującym w trybie Capture. Trzeba pamiętać, że licznik nie jest zerowany i musi być zerowany programowo.
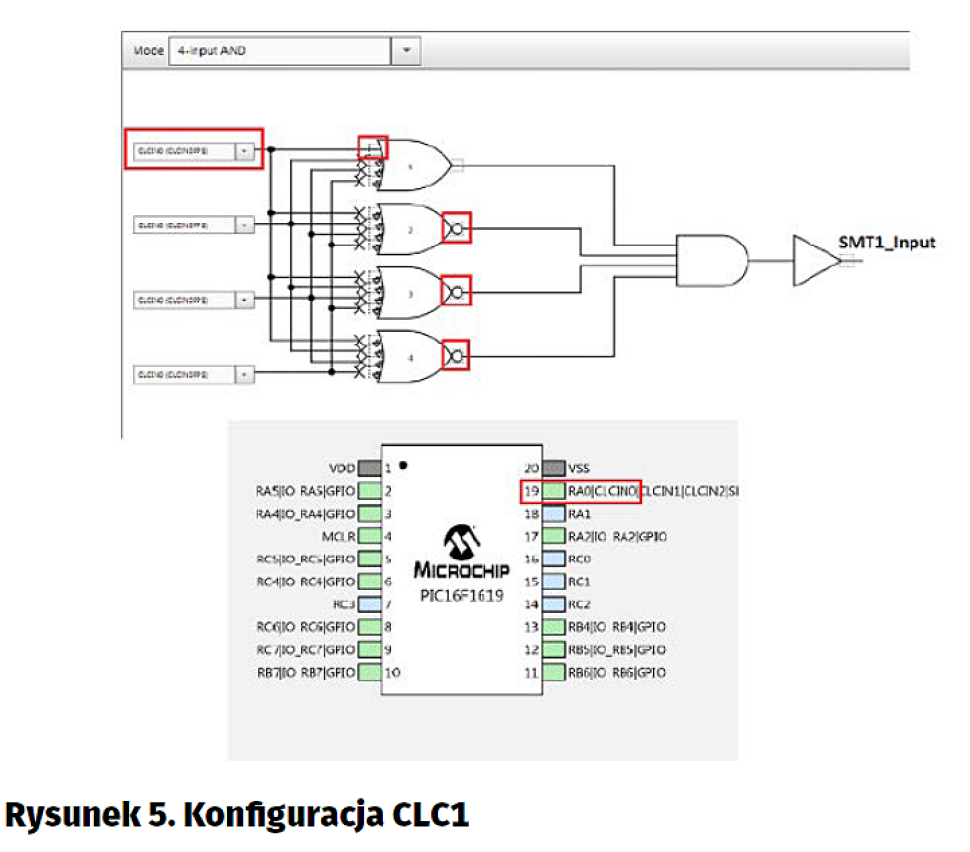
W praktyce przetestowałem tylko jeden tryb pracy: Period and Duty Cycle Acquistion. Żeby podać sygnał z zewnętrznego generatora trzeba go dołączyć przez moduł CLC – tu będzie to moduł CLC1, który skonfigurowano, jak na rysunku 5.
Mierzony sygnał jest podawany na wejście CLCIN0, a następnie przez skonfigurowany tor na wewnętrzne wejście SMT1_input. Po podaniu sygnału o zmiennym współczynniku wypełnienia z generatora, pojedynczy pomiar jest odblokowywany po wykonaniu funkcji SMT1_DataAcquisitionEnable() pokazanej na listingu 2. Pomiar rozpocznie się po ustawieniu bitu SMT1GO, a następnie po pierwszym narastającym zboczu na wejściu SMT1_input. Zakończenie pomiaru jest wykrywane przez testowanie bitu AS w rejestrze SMT1STAT. Jeżeli AS jest ustawiony, to SMT jest w trakcie pomiaru (listing 3). Po wyzerowaniu bitu AS pomiar jest zakończony i można odczytać rejestry CPR i CPW (listing 4).
Wszystkie pokazane tu funkcje zostały wygenerowane automatycznie przez wtyczkę MCC.
Listing 2. Odblokowanie pojedynczego pomiaru
void SMT1_DataAcquisitionEnable(void)
{
// Start the SMT module by writing to SMTxGO bit
SMT1CON1bits.SMT1GO = 1;
}
Listing 3. Testowanie zakończenia pomiaru
bool SMT1_IsSignalAcquisitionInProgress(void)
{
return (SMT1STATbits.SMT1AS);
}
Listing 4. Odczytanie rejestrów CPR i CPW
uint32_t SMT1_GetCapturedPulseWidth()
{
return (SMT1CPW);
}
uint32_t SMT1_GetCapturedPeriod()
{
return (SMT1CPR);
}
Listing 5. Inicjalizacja NCO z parametrami pokazanymi na rys. 19
void NCO1_Initialize (void)
{
// Set the NCO to the options selected in the GUI
// N1OE enabled; N1EN disabled; N1POL active_lo; N1PFM FDC_mode;
NCO1CON = 0x40;
// N1CKS HFINTOSC_16MHz; N1PWS 1_clk;
NCO1CLK = 0x00;
//
NCO1ACCU = 0x00;
//
NCO1ACCH = 0x00;
//
NCO1ACCL = 0x00;
// NCO1INCH 11
NCO1INCH = 11;
// NCO1INCL 199
NCO1INCL = 199;
// Enable the NCO module
NCO1CONbits.N1EN = 1;
}
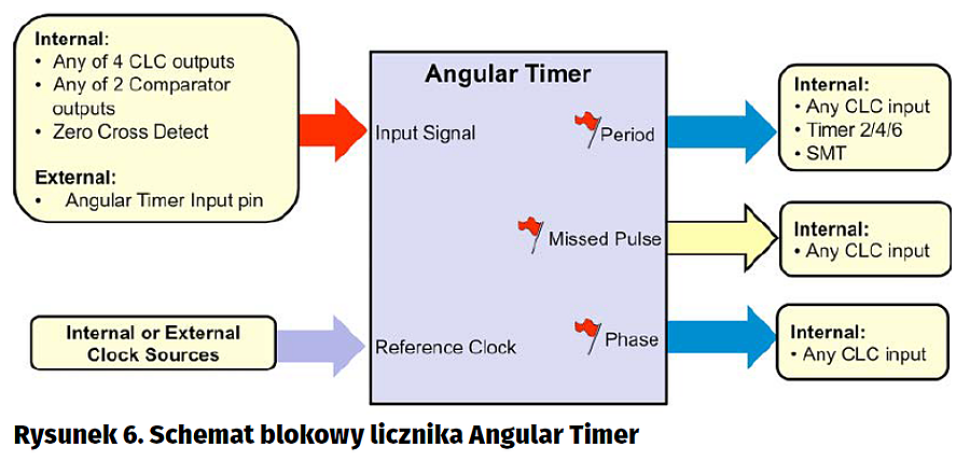
Licznik Angular Timer (rysunek 6) jest przeznaczony do pomiaru powtarzalnych sygnałów reprezentujących ruch obrotowy. Załóżmy, że na wale silnika elektrycznego mamy zamontowany jeden czujnik pomiarowy i każdy obrót wału powoduje wygenerowanie jednego impulsu. Czas pomiędzy tymi impulsami jest czasem jednego pełnego obrotu wału. Jeżeli podzielimy ten czas przez 360 stopni, to otrzymamy czas potrzebny na obrót wału o 1 stopień. Licznik Angular Timer wykonuje automatycznie generuje impulsy odpowiadające czasowi obrotu o 1 stopień.

Do działania modułu są potrzebne dwa sygnały wejściowe: zegar referencyjny i sygnał wejściowy z czujnika położenia. Za wybór sygnału referencyjnego odpowiada rejestr Angular Timer Clock (AT1CLK), a za wybór źródła sygnału wejściowego rejestr Angular Timer Signal (AT1SIG). Z tych sygnałów są tworzone 3 sygnały wyjściowe:
- Period Clock.
- Phase Clock (impuls generowany co zaprogramowany kąt obrotu wału).
- Missing Pulse detector (impuls generowany po wykryciu zagubienia impulsu wejściowego).
Licznik AT może pracować w dwóch trybach:
1) Single Pulse Mode (jeden impuls na obrót).
2) Multiple Pulse Mode (wiele impulsów na obrót).

Licznik Angular Timer może generować ciąg impulsów bazujących na pojedynczych impulsach wejściowych generowanych co 1 obrót. Na rysunku 8 pokazano powiększony przebieg z rys. 7.
Licznik Angular Timer wykrywa „zagubione” impulsy. Algorytm sterujący silnikiem może używać tej informacji i odpowiednio reagować. Licznik oczekuje, że co pełny obrót wystąpi się impuls wejściowy. W pewnych przypadkach, na przykład z powodu zatrzymania się silnika lub błędnego zadziałania czujnika na wale, impuls może się nie pojawić. Układ wejściowy jest wyzwalany, jeśli różnica pomiędzy zapamiętanym okresem poprzedniego, poprawnego wyzwalania zapisana w rejestrze ATxPER i bieżąca wartość licznika mierzącego czas pomiędzy impulsami (Current Period Counter) jest równa wartości zapisanej w rejestrach ATxMISS. Wartość ATxMISS jest zapisywana przez algorytm sterowania silnikiem i jest stała niezależnie od zmian częstotliwości wirowania wału silnika.

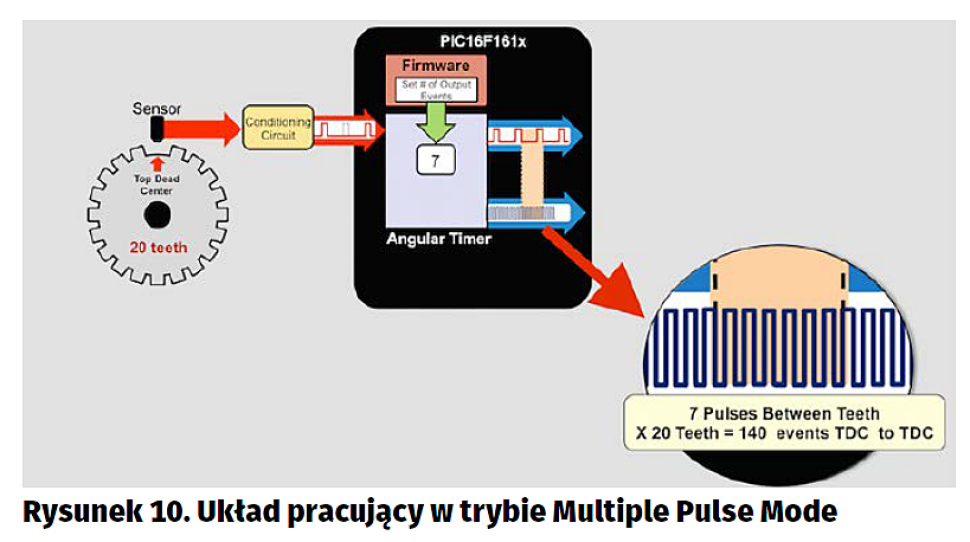
Licznik AT może też pracować w trybie Multiple Pulse Mode. Na wale silnika można umieścić czujnik generujący na przykład 20 impulsów na jeden obrót (rysunek 10). Jeżeli potrzebujemy do sterowania 140 impulsów na 1 obrót, to licznik Angular Timer może dodać 7 dodatkowych impulsów pomiędzy każdym impulsem wejściowym.
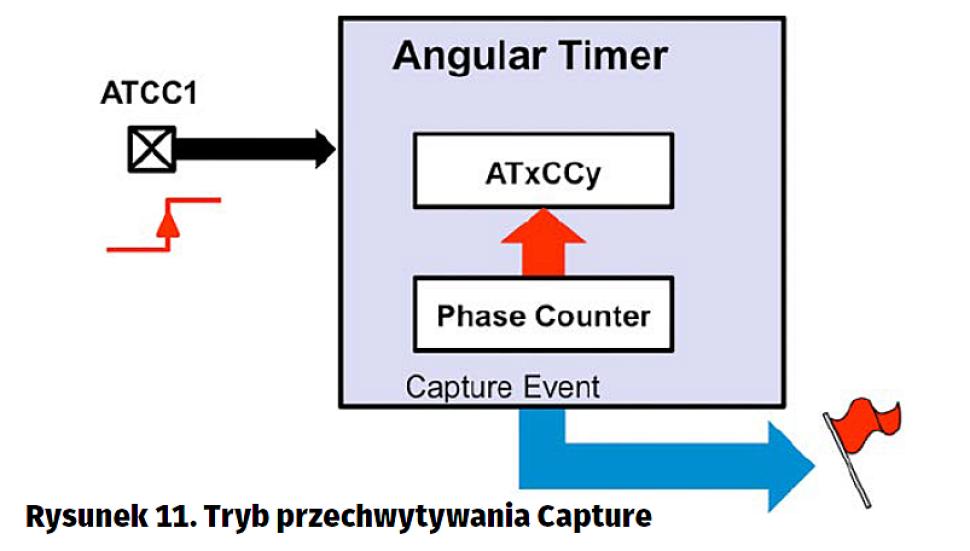
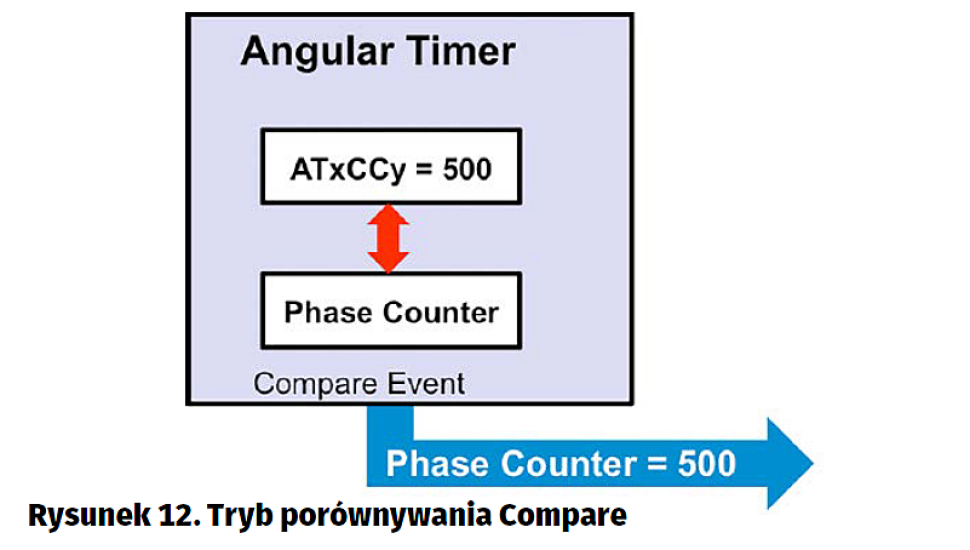
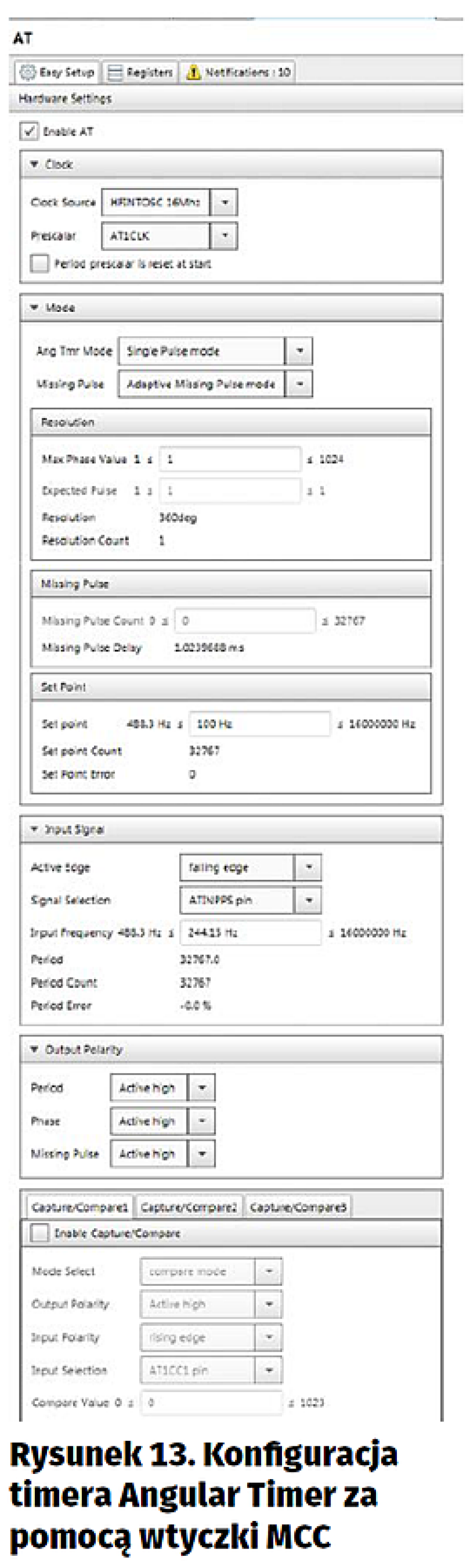
Do sprawdzania statusu (zawartości) rejestrów licznika AT, a także do wywoływania reakcji przy określonym kącie obrotu mogą być użyte tryby Compare i Capture. W trybie Capture procedury użytkowania mogą odczytywać (pobierać) stan licznika fazy po wyzwoleniu na wejściu ATTCx (rysunek 11). Może to mieć zastosowanie do określania kąta sygnału wejściowego do dalszych obliczeń w algorytmie sterowania. W trybie Compare (rysunek 12) jest porównywana wartość licznika fazy z wartością zapisaną w rejestrze ATxCCy. Jeżeli obie liczby są równe, to moduł Angular Timer może zgłosić przerwanie. Konfigurację licznika najlepiej wykonać za pomocą wtyczki MCC (rysunek 13).
Licznik NCO
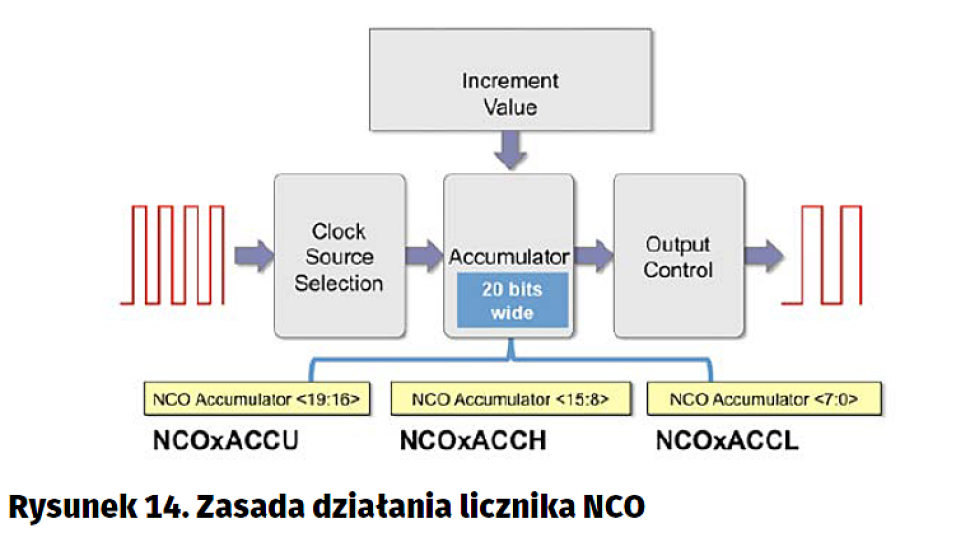
Moduł NCO jest przeznaczony do użycia w aplikacjach, które wymagają generatora ściśle określonej, dokładnej częstotliwości. Może on nie tylko pełnić rolę generatora, ale również pozwala na precyzyjną regulację tej częstotliwości oraz współczynnika wypełnienia generowanego przebiegu.
To czy uda nam się wygenerować pożądaną częstotliwość, zależy od częstotliwości przebiegu na wejściu i współczynnika podziału. Jeżeli wyliczony współczynnik podziału jest liczbą całkowitą, to można uzyskać dokładnie taki przebieg, jakiego oczekujemy. Na przykład, jeżeli dzielimy wejściową częstotliwość 2 MHz, a potrzebujemy 100 kHz, to 20 MHz/100 kHz=20. Problem pojawia się, gdy potrzebujemy np. 130 kHz. Wtedy 20 MHz/130 kHz=15,38461538… Po podzieleniu przez 15 otrzymujemy 133333,3333 Hz. Takie proste dzielenie albo jest obarczone sporym błędem, albo wymaga dobierania częstotliwości wejściowej, by współczynnik podziału był całkowity.
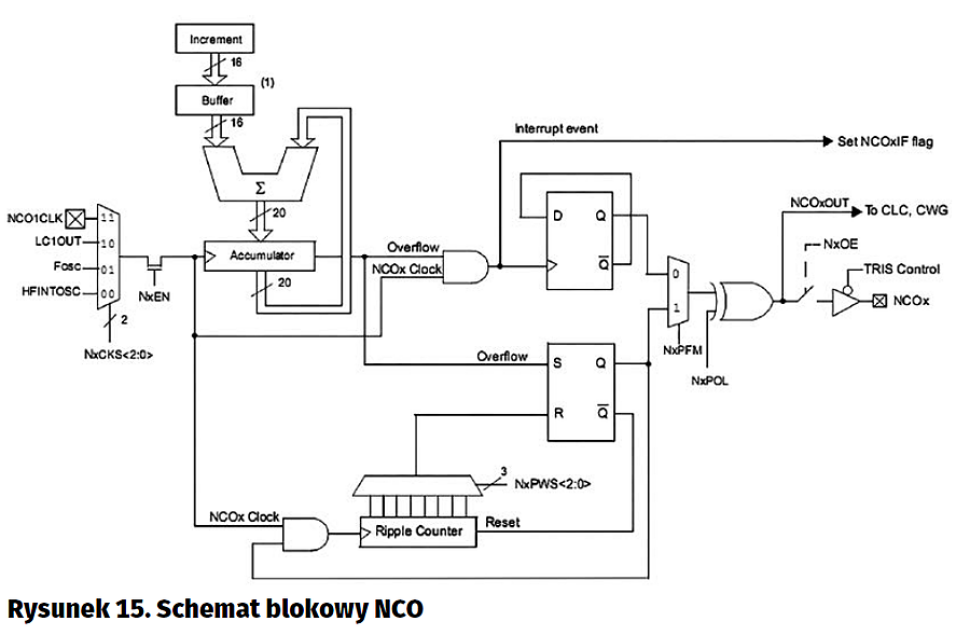
Schemat blokowy generatora NCO pokazano na rysunku 15. Sygnał wejściowy jest wybierany selektorem programowanym bitami NxCKS. Można wybrać przebieg z dedykowanego wejścia mikrokontrolera NCOCLK, wyjścia wbudowanego układu logicznego (CLC) LC1OUT, oscylatora kwarcowego Fosc lub wewnętrznego oscylatora HFINTOSC o maksymalnej częstotliwości 16 MHz. Wybrany przebieg jest zliczany przez 20-bitowy licznik-akumulator. W czasie każdego narastającego zbocza jest do niego dodawana 16-bitowa wartość zapisana przez użytkownika w 16-bitowym rejestrze inkrementacji NCOxINCL. Częstotliwość przepełniania się licznika- akumulatora wylicza się z zależności:

gdzie:
- NCO Clock Frequency – częstotliwość wejściowa generatora NCO.
- Increment Value – liczba dodawana do akumulatora.
- n - długość licznika akumulatora, tu 20 bitów.
FOVERFLOW będzie większa. Na rysunku 16 pokazano przykład zliczania z dodawaniem wartości 0x2000 przy każdym narastającym zboczu przebiegu wejściowego. 20-bitowy licznik-akumulator przepełni się po 8 cyklach (okresach) przebiegu wejściowego. Wybierając kombinację częstotliwości wejściowej i zawartości rejestru NCOxINCL można precyzyjnie dobrać generowaną częstotliwość.
Przepełnienie licznika powoduje zmianę stanu przerzutnika D. Na jego wyjściu Q występuje przebieg prostokątny o wypełnieniu 50% i częstotliwości równej połowie częstotliwości przepełnień licznika. Zapisując bit NxPOL można zmieniać polaryzację sygnału wyjściowego. Przez selektor wyjściowy jest on podawany na wyprowadzenie NCOx, ale jest też wewnętrznie dostępny dla bloków peryferyjnych CLC i CWG. Każde przepełnienie licznika-akumulatora powoduje ustawienie znacznika przerwania NCOxIF. Jeżeli przerwanie nie jest zablokowane, to zostanie zgłoszone i musi być obsłużone. Źródłem przebiegu taktującego NCO mogą być następujące przebiegi: wyjściowy HFINTOSC, wyjściowy FOSC, wyjściowy LCxOUT (CLC), wejściowy (doprowadzenie) CLKIN. Źródło wybiera się za pomocą bitów NxCKS <1:0>.
Moduł NCO może pracować w dwóch trybach: Fixed Duty Cycle i Pulse Frequency Modulation. Tryb wybiera się za pomocą bitu NxPFM w rejestrze NCOxCON:
Tryb FDC (Fixed Duty Cycle). Ten tryb pracy wybierany wyzerowaniu bitu NxPFM. W trakcie pracy NCO cyklicznie zmienia stan na przeciwny po każdym przepełnieniu akumulatora (rysunek 17).
Tryb Pulse Frequency Modulation. W tym trybie wybieranym przez ustawienie bitu NxPFM po każdym przepełnieniu się licznika-akumulatora wyjście NCOx przechodzi w stan aktywny i pozostaje w tym stanie przez czas równy zaprogramowanej wielokrotności okresu zliczanego sygnału wejściowego (rysunek 18). Czas stanu aktywnego (poziom wysoki) i nieaktywnego (poziom niski) zależy od bitu określającego polaryzację NxPOL i bitów NxPWS rejestru konfiguracyjnego NCOxCON.
Do konfiguracji i testów generatora NCO wykorzystałem mikrokontroler PIC16F1509. Okno konfiguracji zostało pokazane na rysunku 19. Możemy wybrać tu:
- Odblokowanie modułu NCO.
- Tryb pracy.
- Polaryzację sygnału wyjściowego.
Silnym wsparciem konfigurowania modułu jest okno Clock Settings. Konfigurujemy tu źródło przebiegu taktującego i podajemy żądana częstotliwość na wyjściu generatora. MCC oblicza rzeczywistą częstotliwość na wyjściu i generuje plik konfiguracyjny (listing 5). Testowanie polega na zmierzeniu generowanej częstotliwości na wyprowadzeniu NCO (RC1 – pin 15).
Tomasz Jabłoński, EP