 Zaloguj
Zaloguj




Wyświetlacz graficzny opisywany w artykule ma rozdzielczość 84×48 piksele oraz 1-bitową „skalę szarości” – dany punkt może być zaczerniony lub przezroczysty. Te wyświetlacze są również dostępne w formie płytek – modułów ułatwiających ich aplikację, gotowych do współpracy z zestawami ewaluacyjnymi, takimi jak Arduino lub Nucleo. Moduł można zasilać oraz sterować nim pomocą napięcia 3,3 V lub 5 V. Moduły są oferowane w dwóch wariantach – z podświetleniem jasnoszarym lub niebieskim. Można je kupić w wielu sklepach internetowych. W omawianym module zastosowano kontroler LCD typu PCD8544.
Kontroler LCD typu PCD8544
Układ PCD8544 komunikuje się z systemem nadrzędnym za pomocą interfejsu SPI. Przesyłamy nim polecenia sterujące i konfigurujące sterownik oraz dane, które chcemy wyświetlić na wyświetlaczu. Sterownik ma pamięć RAM o pojemności odpowiadającej liczbie pikseli matrycy LCD – 84×48 bitów. Jest w niej przechowywany stan każdego punktu – „zaświecony” bądź „zgaszony”. Sterownik nie ma wbudowanych czcionek, więc jest jedynie prostym buforem ramki – przesyłamy do niego mapę bitową pikseli matrycy. Jest ona zapisywana w pamięci RAM, a następnie ustawiana na matrycy poprzez wygenerowanie odpowiednich sygnałów sterujących przez sterownik.
Wyprowadzenia
Sterownik ma wyprowadzenia o następujących oznaczeniach: RST, DC, CE, DIN oraz CLK, do których dochodzi jeszcze wyprowadzenie modułu – pin BL oraz piny zasilania i masy:
Wyprowadzenie RST odpowiada za zerowanie układu. Podanie na ten pin napięcia odpowiadającego poziomowi niskiemu, a następnie wysokiemu powoduje wyzerowanie zawartości wszystkich rejestrów sterownika i przywrócenie konfiguracji domyślnej. Nie powoduje to jednak wyczyszczenia zawartości pamięci RAM – ta po uruchomieniu może być wypełniona niezerowymi wartościami. Jest to obowiązkowa operacja po uruchomieniu układu, przed przystąpieniem do jego wykorzystania.
Poziom logiczny na wejściu DC decyduje, czy transmitowany sygnał jest instrukcją sterującą, czy danymi do umieszczenia w pamięci RAM i w konsekwencji – wyświetlenia na ekranie. Do transmisji poleceń zerujemy wejście DC, a do transmisji danych – ustawiamy.
Polecenia sterujące i konfiguracja sterownika
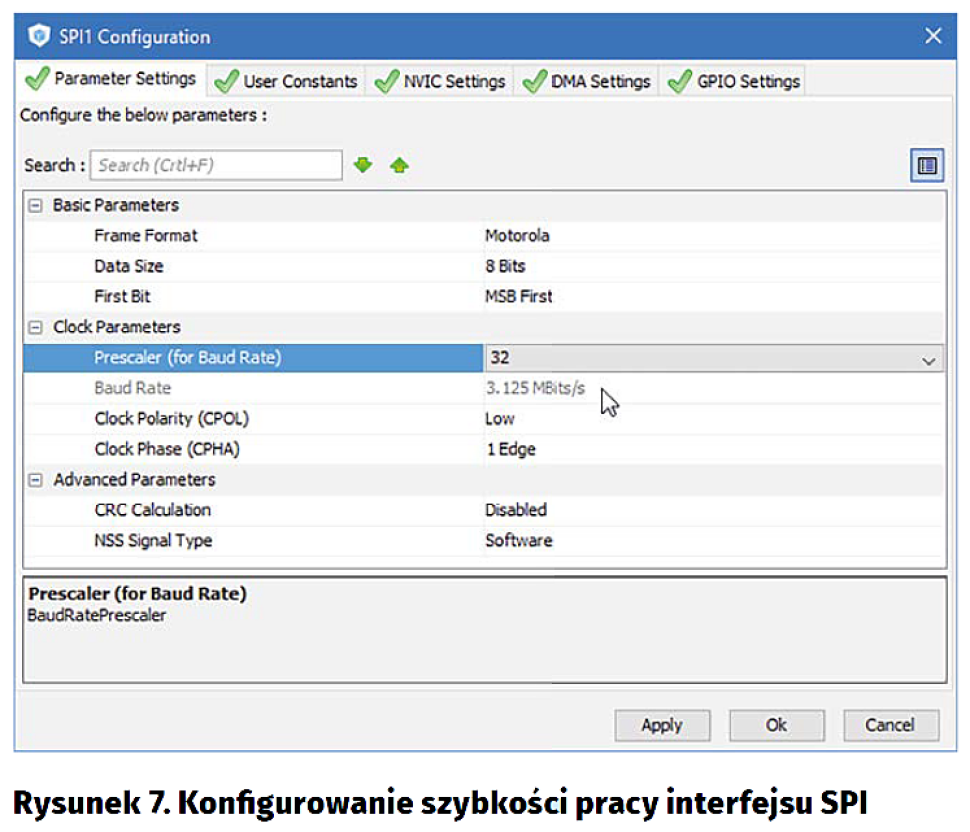
Po restarcie wyświetlacza musimy go skonfigurować, tj. wybrać napięcie sygnału sterującego matrycą (co pośrednio powoduje ustalenie kontrastu), współczynnik bias (liczba progów napięcia sygnału sterującego), współczynnik kompensacji temperaturowej oraz tryb pracy wyświetlacza. Odbywa się to poprzez przesyłanie rozkazów, mieszczących się wraz z ustawianymi wartościami w poszczególnych bajtach danych przesyłanych interfejsem SPI. Dane te transmitujemy z maksymalną szybkością do 4.0 Mbit/s.
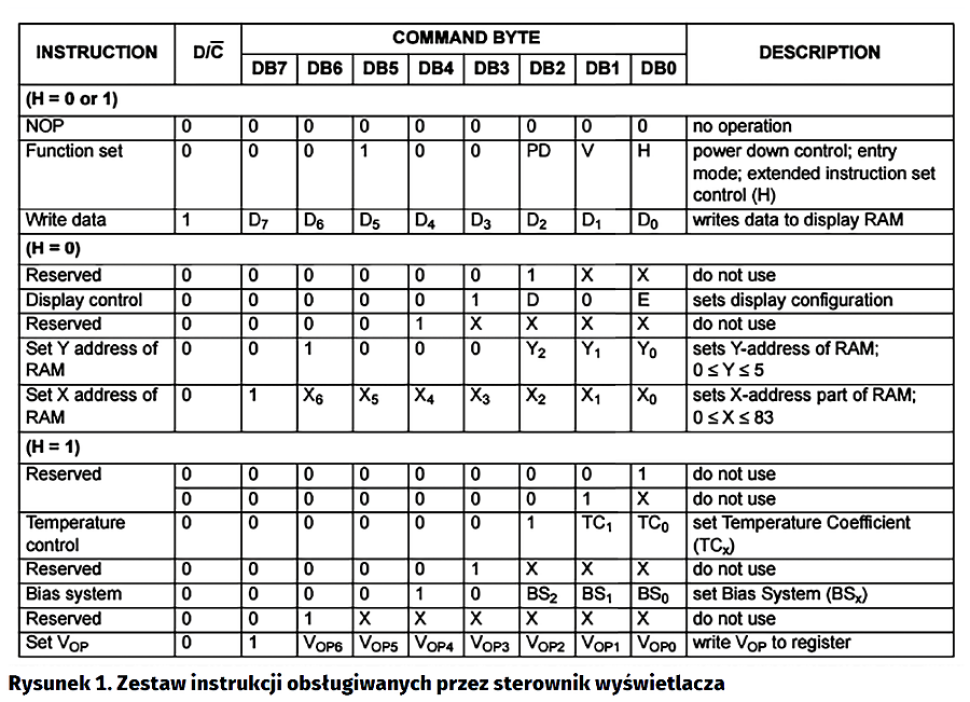
Na rysunku 1 pokazano tabelę zaczerpniętą z dokumentacji sterownika. Znajduje się w niej spis rozkazów obsługiwanych przez sterownik wraz z ich strukturą binarną. Polecenia podzielono na dwie grupy – zestaw poleceń rozszerzonych (H=1) oraz podstawowych (H=0). Za pomocą poleceń rozszerzonych konfigurujemy sterownik do pracy z konkretną matrycą. Polecenia podstawowe dotyczą trybu wyświetlania, sposobu transmisji danych do wyświetlacza oraz położenia „kursora”. Są też częściej wykorzystywane w trakcie pracy z wyświetlaczem.
Aby wejść w tryb poleceń rozszerzonych i skonfigurować wyświetlacz, musimy nadać interfejsem SPI ciąg bitów „00100001” (0x21), aby później przejść do trybu poleceń podstawowych – „00100000” (0x20). Wyzerowane parametry PD oraz V występujące odpowiednio na bicie nr 3 i 2 (licząc od prawej) odpowiadają odpowiednio za włączenie chipu oraz ustawienie kierunku adresacji (o tym później).
Będąc w trybie poleceń rozszerzonych, ustawiamy kolejno:
- Napięcie sygnału sterującego (kontrast). Napięcie sygnału sterującego jest zależne od wykorzystywanej matrycy i powinno być odpowiednio do niej dobrane. Im wyższa wartość, tym wyższy będzie kontrast wyświetlanych elementów, nie możemy jednak zwiększyć jej za bardzo – mogłoby to spowodować uszkodzenie matrycy. Napięcie ustawiamy poleceniem „1XXXXXXX”, gdzie „XXXXXXX” to liczba binarna, którą podstawiamy do wzoru „3,06+XXXXXXX*0,06 V”. Dysponujemy zakresem od 3,06 V do 10,74 V. Optymalna wartość dla opisywanego modułu to 5,34 V, a ustawiające ją polecenie sterujące to: „11001000” (hex 0xB8).
- Współczynnik kompensacji temperaturowej. W zależności od temperatury matrycy zmienia się kontrast wyświetlanych na niej elementów. W niższej temperaturze kontrast jest niższy – ciekłe kryształy nie poruszają się tak „żwawo”, jak w wyższej temperaturze. Aby to skompensować, sterownik wyświetlacza może zwiększyć napięcie sterujące i zarazem kontrast przy niższych temperaturach oraz zmniejszyć napięcie sterujące przy wyższych. Do ustawienia współczynnika kompensacji temperaturowej służy polecenie „000001XX”, gdzie pod „XX”, podstawiamy wartość współczynnika z zakresu od „00” do „11” binarnie. Dla omawianego modułu efekt ten nie jest zauważalny, możemy więc spokojnie wybrać wartość „00”.
- Współczynnik bias. Aby pobudzić ciekły kryształ do skręcenia, potrzebujemy przepuścić przez niego prąd przemienny. Im więcej pikseli/obszarów obsługiwanych jest przez pojedynczą elektrodę sterującą ciekłym kryształem (w parze z innymi elektrodami po przeciwnej stronie matrycy), tym więcej poziomów napięć powinien mieć nasz sygnał sterujący. Współczynnik bias decyduje o liczbie tych poziomów. Zmieniamy go poleceniem „00010XXX”. Jego optymalna wartość dla tej liczby pikseli przypadających na elektrodę to 4 (dokładniej 1/8, bo wartość ta podstawiana jest do wzoru „1/n+4”), czyli „100” binarnie. Gotowy rozkaz konfiguracyjny przyjmie postać: „00010100” (0x14).

- D=0, E=0, polecenie: „00001000” (hex 0x08) – w tym trybie wszystkie piksele wyświetlacza będą zgaszone, tj. będą przepuszczały światło.
- D=1, E=0, polecenie: „00001100” (hex 0x0C) – tryb normalny – jedynka w mapie bitowej odpowiadać będzie czarnemu punktowi na wyświetlaczu, a zero spowoduje, że ten punkt będzie przepuszczał światło.
- D=1, E=1, polecenie: „00001101” (hex 0x0D) – tryb odwrócony – jedynka odpowiada punktowi przepuszczającemu światło, a zero – blokującemu je.
- D=0, E=1, polecenie: „00001001” (hex 0x09) – w tym trybie wszystkie piksele wyświetlacza będą ustawione, tj. będą blokowały światło.
Dane przesyłane do sterownika trafiają do pamięci RAM (rysunek 2), a następnie „na matrycę”. Pamięć podzielono na 6 segmentów, które wybieramy, ustawiając adres poziomy (liczbę z zakresu 0…5) oraz pionowy, tj. liczbę z zakresu 0…83. Transmitując bajt danych (8 bitów), przesyłamy mapę bitową paska o wysokości 8 pikseli, umieszczanego pod wskazanym adresem oraz rysowanego w odpowiadającym mu miejscu na wyświetlaczu. Każdy bit, odpowiada jednemu pikselowi – logiczna „1” powoduje, że piksel będzie zaczerniony, a logiczne „0”, że przezroczysty. Najbardziej znaczący bit tego bajtu danych opisuje skrajnie dolny punkt paska.
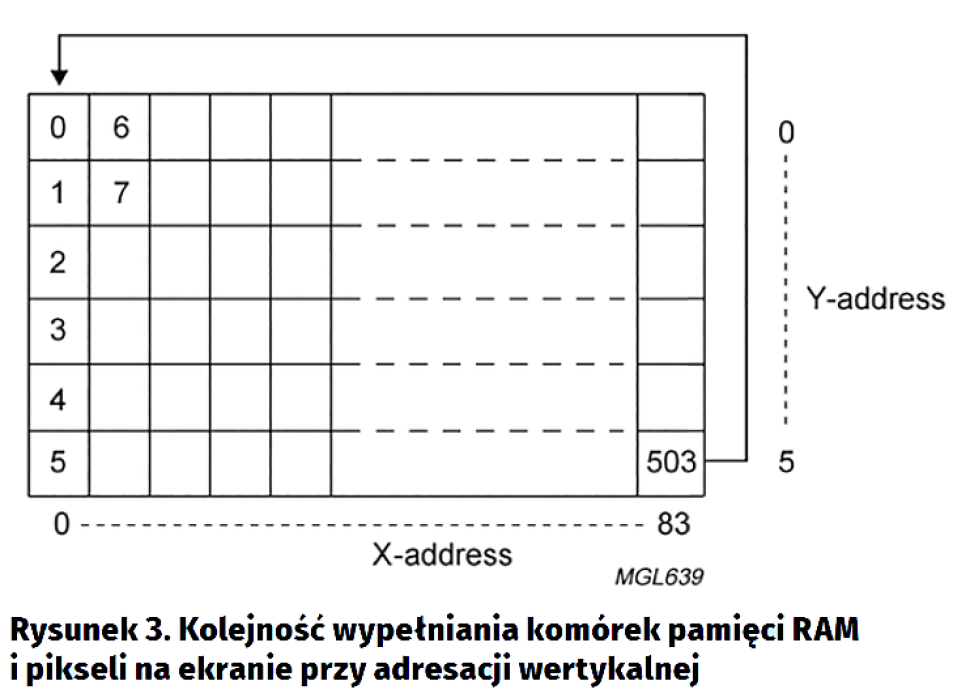
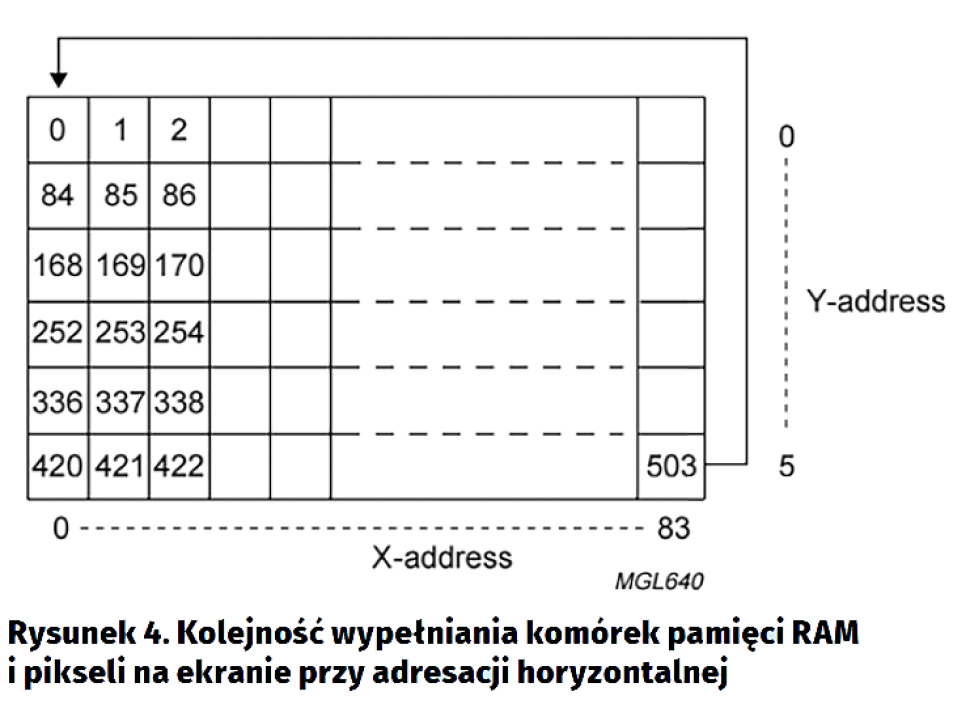
Aby po przesłaniu każdego bajta nie była konieczna zmiana adresu, zdefiniowano dwa tryby adresacji – wertykalny (pionowy) i horyzontalny (poziomy). Po przetransmitowaniu każdego bajtu jest inkrementowany adres poziomy lub pionowy. W trybie horyzontalnym kolejne „paski” będą umieszczane po prawej względem uprzednio przesłanego. Gdy skończy się linia, to „pasek” zostanie umieszczony w pierwszej kolumnie następnego segmentu lub jeśli był to koniec ostatniego segmentu, w pierwszej kolumnie pierwszego segmentu. W trybie wertykalnym kolejne paski umieszczane są pod poprzednimi. Gdy skończy się kolumna, kolejny pasek trafi do pierwszego wiersza kolejnej kolumny lub pierwszego wiersza pierwszej kolumny. Dokładniej zobrazowano to na rysunkach 3 i 4.
Pierwszy projekt – szachownica
Po wyjaśnieniu teorii działania i sterowania wyświetlaczem, przejdźmy do części praktycznej i spróbujemy wyświetlić na nim jakiś obraz, np. szachownicę. Uruchamiamy narzędzie STM32CubeMX i w kreatorze wyboru mikrokontrolera wybieramy posiadany przez nas układ. Dla przypomnienia, na używanej przeze mnie, podczas tworzenia tego kursu, płytce rozwojowej KA–NUCLEO–F411CE jest mikrokontroler STM32F411CEU6 (rysunek 5).

Na fotografii 6 pokazano wyprowadzenia modułu wyświetlacza. Ich znaczenie zostało już wyjaśnione wcześniej. Teraz potrzebujemy jedynie pamiętać, że wyprowadzenia procesora przyłączone do pinów BL, CE, RST i DC powinny być skonfigurowane jako „GPIO Output”. Piny DIN i CLK to wyprowadzenia interfejsu SPI – odpowiednio MISO oraz SCK.
Aby ustawić wyprowadzenie procesora w tryb pracy „GPIO Output”, klikamy prawym przyciskiem na jego rysunek i z listy wybieramy stosowną pozycję. Polecam przy okazji nadać pinom nazwy, takie jak na rysunku 5. Ułatwi to ich późniejszą identyfikację oraz użycie w kodzie programu. Interfejs SPI konfigurujemy, rozwijając dowolny interfejs „SPIx” na liście po lewej stronie okna programu i z listy rozwijanej „Mode” wybierając opcję „Transmit Only Master”. Dokładne znaczenie tej opcji przedstawione zostało w poprzedniej części serii. Jeśli nasza płytka rozwojowa lub prototypowa ma oscylator kwarcowy (tak jak KA–NUCLEO–F411CE), włączamy jego użycie poprzez rozwinięcie, na liście po lewej stronie okna, pozycji „RCC” i ustawienie, w polu „High Speed Clock (HSE)”, wartości „Crystal/Ceramic Resonator”.

Jeśli korzystamy z płytki rozwojowej KA–NUCLEO, możemy użyć tych samych wyprowadzeń procesora, które przedstawiono na rysunku 5 oraz tego sam interfejsu SPI1. Należy wtedy połączyć piny modułu wyświetlacza: RST, CE, DC, DIN, CLK, VCC, BL, GND, odpowiednio do pinów płytki: D5, D4, D3, D11, D13, 3,3V , D2, GND.
Na kolejnej planszy kreatora – „Clock Configuration”, podobnie jak w poprzednich częściach, konfigurujemy „rozchodzenie się” po układzie mikrokontrolera sygnału taktującego. Dokładny opis schematu przedstawiony został w pierwszej części kursu. Jeśli używana przez nas płytka ewaluacyjna ma oscylator kwarcowy, ustawiamy jego częstotliwość oraz wybieramy go jako źródło sygnału częstotliwości – w polu „Input frequency” podajemy jego częstotliwość (na płytce KA–NUCLEO jest to 8 MHz), w polu „PLL Source Mux” wybieramy opcję „HSE”, a w polu „System Clock Mux” – „PLLCLK”. W pole „HCLK” wpisujemy natomiast maksymalną dozwoloną wartość.
Teraz już możemy wygenerować kod projektu i zaimportować go w środowisku IDE. Klikamy w ikonę zębatki – podajemy nazwę projektu i ścieżkę dostępu do miejsca, gdzie ma on zostać zapisany, z pola „Toolchain / IDE”, wybieramy pozycję „SW4STM32”, w zakładce „Code Generator” zaznaczamy opcję „Generate peripherial initialization as pair of ‚.c/.h’...” i klikamy „OK”. Otwieramy środowisko System Work-
bench for STM32, zamykamy w nim planszę powitalną i w panelu po lewej stronie okna klikamy prawym przyciskiem myszy, z menu kontekstowego wybieramy opcję „Import...” –> „Existing Projects into Workspace” –> „Browse...”, nawigujemy do folderu projektu i klikamy „Finish”.
Dodajemy do nowego projektu 2 pliki – do folderu „Inc”: „display.h” oraz do folderu „Src”: „display.c”. Aby to zrobić, klikamy PPM na folder nadrzędny i z menu wybieramy opcje „New” –> „File”, podajemy nazwę tworzonego pliku oraz klikamy przycisk „Finish”. Następnie oba pliki wypełniamy zawartością, odpowiednio z listingów 1 i 2, modyfikujemy plik main.c zgodnie z listingiem 3 oraz kompilujemy kod i uruchamiamy go na mikrokontrolerze – ikony młotka i robaka na pasku narzędziowym.
Podobnie jak w poprzedniej części, funkcje służące do obsługi wyświetlacza wydzielone zostały do osobnych plików. Plik „.h” jest plikiem nagłówkowym – przechowuje on definicje typów danych i struktur, a także prototypy funkcji. Zawartość funkcji umieszczona jest w pliku „.c”. Struktura „display_config” przechowuje informacje nt. używanych wyprowadzeń i ich portów oraz interfejsu SPI. Musimy ją utworzyć i wypełnić przed wykorzystaniem jakiejkolwiek funkcji „display_...()”. Utworzenie i wypełnienie struktury ma miejsce w pliku „main.c”, w sekcji „USER CODE 2”. Następnie wywoływane są funkcje display_setup() i display_set_dxy(). Pierwsza z nich, konfiguruje sterownik do pracy zgodnie z sekwencją przedstawioną powyżej. Druga ustala kierunek rysowania oraz pozycje „kursora”. Dalej, w pętli, rysowany jest wzór szachownicy, poprzez umieszczanie w pamięci RAM wyświetlacza czterech pionowych pasków „11110000” (hex 0xF0) na przemian z czterema paskami „00001111” (hex 0x0F). W podobny sposób możliwe byłoby wyświetlenie pliku graficznego – należałoby zamienić go na postać 1-bitowej bitmapy o wymiarach 84×48 pikseli i za pomocą darmowego programu LCDAssistant zamienić na postać tablicy bajtów pionowych pasków, następnie można by przekopiować w pętli całą tablicę do pamięci RAM wyświetlacza, korzystając z funkcji display_write_data().
Drugi projekt – wyświetlanie tekstu
Oprócz wyświetlania bitmap, bardzo często potrzebujemy prezentować na wyświetlaczu litery i cyfry. Rozbudujmy więc nasz projekt, aby to umożliwić. Musimy dodać czcionkę i funkcję wypisującą na wyświetlaczu kolejne znaki. Dodatkowo wyposażymy mikrokontroler w bufor znaków i to do niego zapisywać będziemy tekst przed wyświetleniem.
Do plików „display.h” i „display.c” dopisujemy kod umieszczony na listingach 4 i 5. Plik „main.c” modyfikujemy zgodnie z listingiem 6.
W pliku „display.h”, do definicji struktury display_config, dodajemy dwuwymiarową tablicę – bufor znaków. Umieszczamy tam także: tablicę map bitowych poszczególnych znaków – czcionkę oraz prototypy dodatkowych funkcji rysujących zawartość bufora znaków oraz poszczególne znaki. Do pliku „display.c” dodajemy definicje tych funkcji. Modyfikujemy także sekcję „USER CODE 2”, dodając do niej wywołanie nowych funkcji. Od teraz tekst, który chcemy wyświetlić na wyświetlaczu, umieszczamy w dwuwymiarowej tablicy „cfg.buffer[y][x]” – gdzie y i x to współrzędne, odpowiednio pionowe i poziome, znaku na wyświetlaczu. Najłatwiej zrobić to za pomocą funkcji memcpy() – kopiującej fragmenty pamięci z podanego adresu pod podany adres. Kolejne jej parametry to docelowy adres miejsca w pamięci, źródłowy adres oraz długość, w bajtach, kopiowanych danych. Aby wydobyć adres danej zmiennej lub komórki tablicy z pamięci, poprzedzamy jej nazwę znakiem „&”.
Powyższy przykład możemy rozbudować i np., korzystając z funkcji sprintf() i snprintf(), zapisywać do bufora i wyświetlać na wyświetlaczu odczytywane parametry stało i zmiennoprzecinkowe z różnych czujników czy też zbudować proste menu obsługiwane przyciskami. Przydatne może być umieszczenie wywoływania funkcji przerysowującej zawartość wyświetlacza, na podstawie bufora znaków, w funkcji obsługi przerwania zegara.
Aleksander Kurczyk












