 Zaloguj
Zaloguj




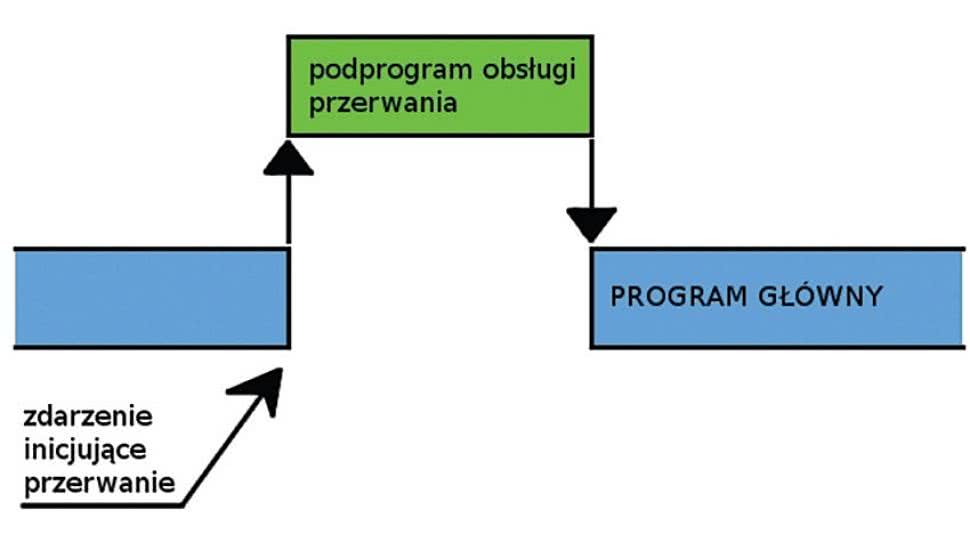
Rysunek 1. Sposób działania programu
Mówiąc w największym skrócie, przerwania są sposobem mikrokontrolera, by mógł zareagować na zdarzenia, których momentu pojawienia się nie sposób określić. Najlepiej w tym celu wyobrazić sobie hipotetyczny program, w którego pętli głównej zapracowany mikrokontroler bez przerwy obsługuje odczyt czasu z zegara, wyświetla ten czas na wyświetlaczu, obsługuje transmisję szeregową z zewnętrznego urządzenia.
A jednocześnie musi zliczać krótkie impulsy na jednym z portów wejściowych, które mogą pojawić się w dowolnym momencie. Kontroler zajęty innymi zadaniami nie może bez przerwy sprawdzać stanu portu i przez to może przeoczyć fakt wystąpienia impulsu.
Dzięki przerwaniu generowanemu w momencie wystąpienia impulsu wykonywanie głównej pętli programu zostanie zawieszone, nastąpi skok do podprogramu obsługującego zliczenie impulsu i powrót do wykonywania zadań w pętli głównej. Opisaną sytuację przedstawiono na rysunku 1.
Taka jest ogólna zasada działania mechanizmu przerwań. W mikrokontrolerze STM32F układami generującymi przerwania, czyli źródłami przerwań, mogą być nie tylko porty ale także: liczniki, przetworniki, porty transmisji szeregowej, zegar czasu rzeczywistego itd.

Tabela 1. Wektory przerwań
W dokumentacji technicznej (RM0008) dostępnej na stronie producenta jako dokument CD00171190.pdf znaleźć można tabelę Vector table for other STM32F10xxx devices w której znajduje się zestawienie obsługiwanych przez kontroler źródeł przerwań. W tabeli obok opisu źródła przerwania podano jego priorytet (czyli określenie czy przerwanie jest mniej lub bardziej istotne a więc obsługiwane przed innymi) oraz adres w tabeli wektorów przerwań.
Gdy zaistnieje przyczyna wywołująca przerwanie mikrokontroler po zawieszeniu wykonywania głównego programu skacze pod ten właśnie adres. Szuka tam kolejnego adresu (wektora) wskazującego na początek podprogramu obsługi przerwania. Na pierwszych pozycjach tabeli zaznaczone szarym kolorem tła znajdują się przerwania systemowe związane ze stanem samego kontrolera, debugowaniem programu itp.
Dla łatwiejszego zrozumienia jak uruchamia się przerwanie w opisie skupię się na przerwaniach związanych z liniami I/O. Sposób uruchomienie przerwań z innych źródeł różni się tylko w szczegółach.
Mechanizm przerwań linii I/O
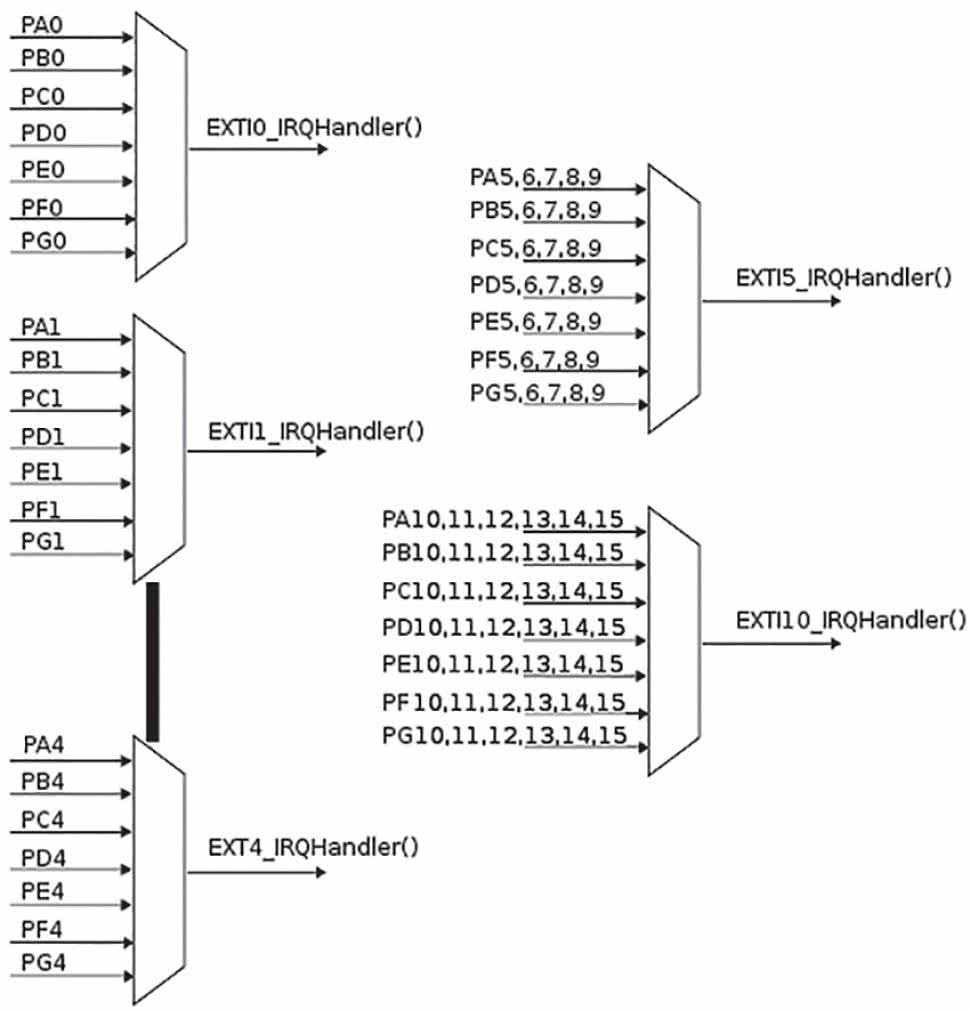
Rysunek 2. Struktura przerwań zewnętrznych
W tabeli 1 umieszczono część zawartości Vector table for other STM32F10xxx devices dotycząca przerwań linii I/O
Ponieważ kontrolery STM32F mają dużą i zależną od typu i rodzaju obudowy liczbę portów I/O, w tabeli pogrupowano wektory przerwań generowane przez linie I/O. Wszystkie linie o numerze 0 portów A, B, C ... wywołują wspólne przerwanie EXTI0, linie 1 wywołują przerwanie EXTI1 itd. Z kolei, linie od 5 do 9 portów A, B, C ... wywołują wspólne przerwanie EXTI9_5 a linie od 10 do 15 wywołują przerwanie EXTI15_10. W sposób schematyczny pokazano to na rysunku 2.
Cały proces uruchamiania mechanizmu przerwań sprowadza się do kilku łatwych do zapamiętania kroków:
Konfiguracji wyprowadzenia I/O. Zazwyczaj wyprowadzenie będzie ustawiane jako wejściowe ale nie jest to konieczne. Wyprowadzenie może mieć wewnętrzne podciąganie do napięcia zasilania lub poziomu masy lub pozostawione bez podciągania. Dokładny opis konfiguracji wyprowadzeń I/O znajduje się w jednym z poprzednich odcinków kursu.
- Napisanie podprogramu obsługi przerwania wyprowadzenia I/O.
- Inicjacja kontrolera przerwań NVIC.
- Inicjacja parametrów przerwania i włączenie przerwania.
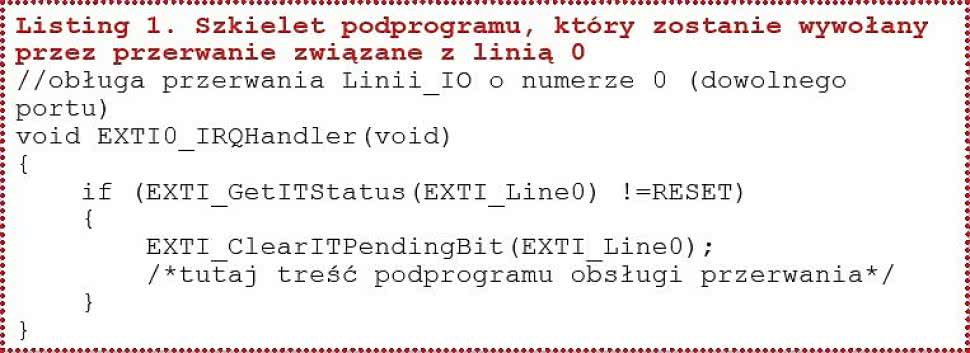
Listing 1. Szkielet podprogramu, który zostanie wywołany przez przerwanie związane z linią 0
Poniżej zostaną dokładniej opisane punkty od 2 do 4. Dodatkowo można zapoznać się z przykładem znajdującym się w STM32F10x Standard Peripherals Firmware Library w podkatalogu Project/STM32F10x_StdPeriph_Examples/EXTI/EXTI_Config.
Ponieważ w przykładach wykorzystywane będą funkcje oferowane przez bibliotekę standardową warto zapoznać się z ich opisem. Można to zrobić w sposób podawany w poprzednich odcinkach kursu. Należy uruchomić plik stm32f10x_stdperiph_lib_um.chm a w polu wyszukiwań wpisać skrót "EXTI". Z wyświetlonych opcji należy wybrać drugą a następnie z wyświetlonej listy kliknąć na EXTI_Exported_Functions.
Podprogram obsługi przerwania
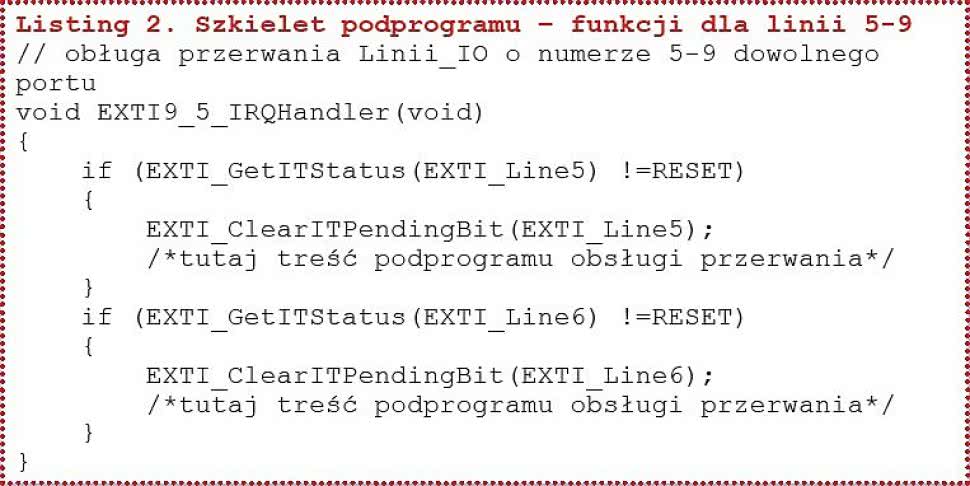
Listing 2. Szkielet podprogramu - funkcji dla linii 5-9
Podprogramy przerwań, na które wskazują adresy w tablicy wektorów przerwań, należy umieścić w pliku o nazwie stm32f10x_it.c. Ten standardowo generowany plik powinien znaleźć się w każdym programie, nawet tym, w którym użytkownik nie uruchamia własnych przerwań, ponieważ umieszczone są w nim podprogramy, do których skacze kontroler po wystąpienia któregoś z przerwań systemowych.
Domyślnie są to nieskończone pętle typu while (1) {}. W razie wystąpienia błędu systemowego generowanego np. w przypadku wyjścia poza zadeklarowany obszar pamięci dla tablicy czy próby dzielenia przez 0, mikrokontroler zatrzyma program w takiej pętli nie dopuszczając do większych szkód, czyli zupełnie niekontrolowanego działania, co popularnie nazywa się "pójściem w maliny". Na końcu pliku stm32f10x_it.c jest miejsce na dopisanie obsługi własnych przerwań.
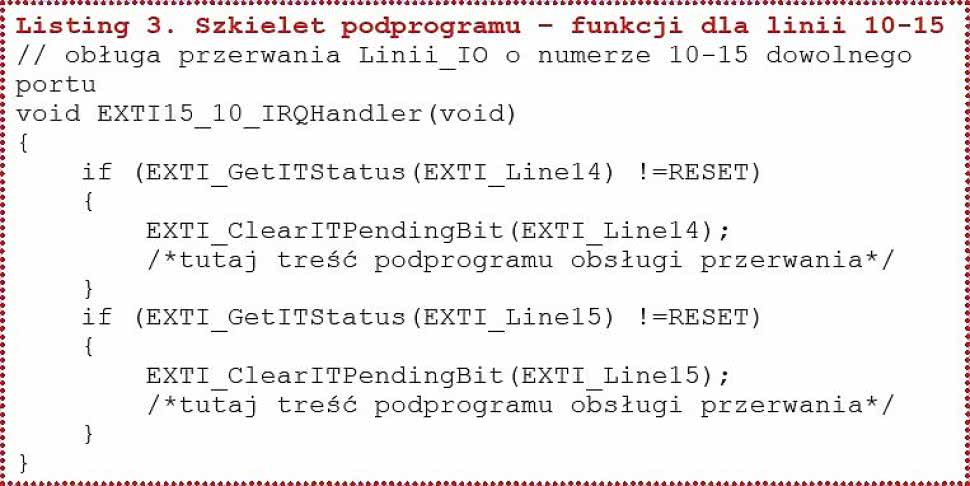
Listing 3. Szkielet podprogramu - funkcji dla linii 10-15
Na listingu 1 pokazano szkielet podprogramu, który zostanie wywołany przez przerwanie związane z linią 0 dowolnego portu:
Nazwa podprogramu - funkcji obsługującej przerwanie EXTI0_IRQHandler() nie jest dowolna. Nazwy funkcji obsługujących przerwanie zostały zdefiniowane w pliku startup_stm32f10x_md.s i nie powinny być zmieniane. W instrukcji warunkowej za pomocą funkcji bibliotecznej EXTI_GetITStatus następuje sprawdzenie czy przerwanie zostało wywołane przez linię 0.
Jeżeli tak, to funkcja EXTI_ClearITPendingBit zeruje flagę przerwania. Jest to konieczne, gdyż dopóki flaga nie zostanie wyzerowana podprogram obsługi przerwania będzie nieustannie wywoływany. W dalszych liniach użytkownik może umieścić własne procedury obsługi przerwania.

Tabela 2. Priorytety i podpriorytety w grupach
Funkcję EXTI0_IRQHandler() wywoła przerwanie każdej linii 0 dowolnego portu: PA, PB itd. Jeżeli jako źródła przerwań zostały wybrane linie 0 kilku różnych portów, to procedury obsługi utworzone przez użytkownika powinny mieć możliwość rozróżnienia, który port jest źródłem przerwania. Szkielet podprogramu - funkcji dla linii 5-9 zamieszczono na listingu 2.
Ponieważ funkcja zbiorczo obsługuje przerwania linii od 5 do 9 funkcja biblioteczna EXTI_GetITStatus pozwala na zidentyfikowanie czy źródłem przerwania była linia 5, czy 6. Przed zakończeniem obsługi przerwania należy wyzerować flagę przerwania.
Analogiczny szkielet podprogramu - funkcji dla linii 10-15 pokazano na listingu 3.
Inicjacja kontrolera przerwań NVIC
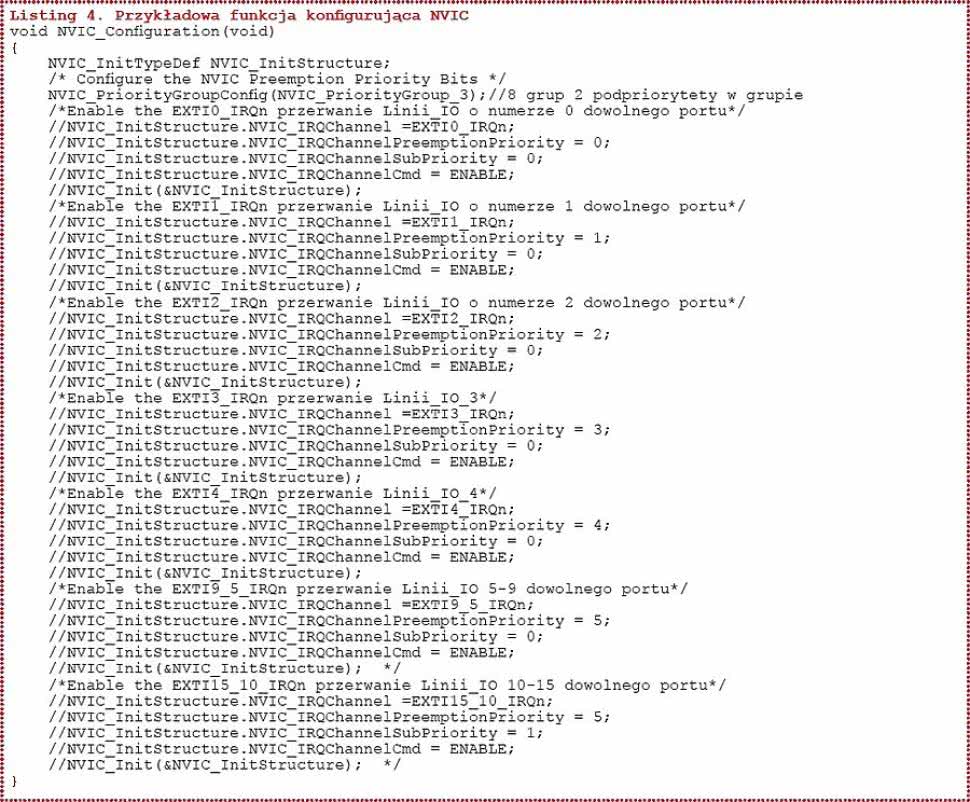
Listing 4. Przykładowa funkcja konfigurująca NVIC
W STM32F obsługą przerwań zajmuje się specjalny wewnętrzny układ nazwany NVIC (Nested Vectored Interrupt Controller). Uruchomienie jakiegokolwiek przerwania wiąże się z zaprogramowaniem działania tego układu. Należy ustalić schemat priorytetów i włączyć obsługę źródeł, które będą generowały przerwania.
Schemat priorytetów polega na ustalenia podziału pomiędzy ilością priorytetów grupowych (preemption prioryty) i ilością podpriorytetów (subpriority) w ramach każdej grupy.
Priorytet grupowy ustala znaczenie przerwania. Wystąpienie przerwania o wyższym priorytecie grupowym spowoduje, że zostanie ono obsłużone przed przerwaniem o niższym priorytecie. Dodatkowo obsługa przerwania o niższym priorytecie może zostać przerwana na czas obsługi przerwania o wyższym priorytecie.
Podpriorytet określa znaczenie przerwania w ramach grupy. Gdy wystąpią jednocześnie żądania obsługi przerwań z tej samej grupy, jako pierwsze zostanie obsłużone przerwanie o wyższym podpriorytecie.
Schemat priorytetów polega na wyborze ilości grup priorytetów i ilości podpriorytetów w ramach każdej grupy. Możliwe schematy umieszczono w tabeli 2.
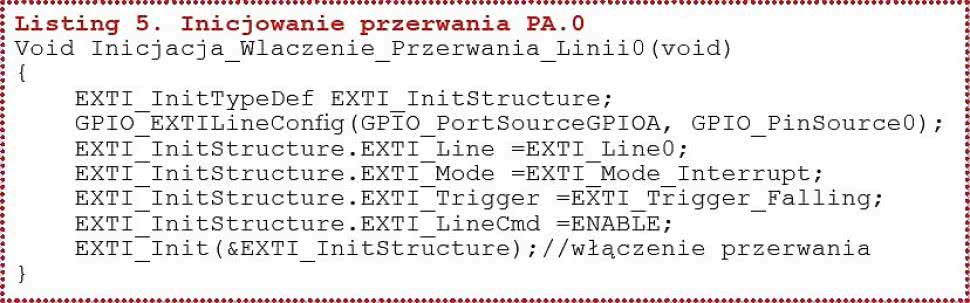
Listing 5. Inicjowanie przerwania PA.0
Wagi grup i podpriorytetów oznaczone są liczbami. Przerwania o wyższych priorytetach mają wagi o niższych numerach, 0 oznacza najwyższy priorytet.
Oprócz określenia schematu priorytetów należy zaprogramować NVIC do obsługi konkretnego źródła przerwania oraz określić jego priorytet. Przykładowa konfiguracja NVIC-a może wyglądać jak na listingu 4.
W przykładzie wybrany został następujący schemat: 8 grup po 2 poziomy podpriorytetów w grupie. Najwyższy priorytet będzie miało przerwanie EXTI0_IRQn, niższy EXTI1_IRQn itd. Przerwania EXTI9_5_IRQn i EXTI15_10_IRQn znalazły się w grupie o najniższym priorytecie. Przy czym pierwsze z nich ma wyższy podpriorytet.
W zależności od rzeczywiście użytych we własnym programie przerwań należy odkomentować właściwy fragment przykładowego kodu. Można też ustawić inny schemat priorytetów i ich przyporządkowanie.
Inicjowanie parametrów i włączenie przerwania

Listing 6. Podprogram obsługi przerwania pochodzącego od kanału CC1
Ostatnim krokiem jest ustawienie parametrów związanych z konkretnym źródłem przerwania i włączenie samego przerwania. Fragment programu na listingu 5 pokazuje jak można to zrobić dla linii PA.0. Tak jak wcześniej posłużą do tego procedury biblioteki STM32F10x Standard Peripherals Firmware Library.
Linia PA.0 wygeneruje przerwanie po wystąpieniu opadającego zbocza podanego sygnału.
Przykład włączenia przerwania Timera
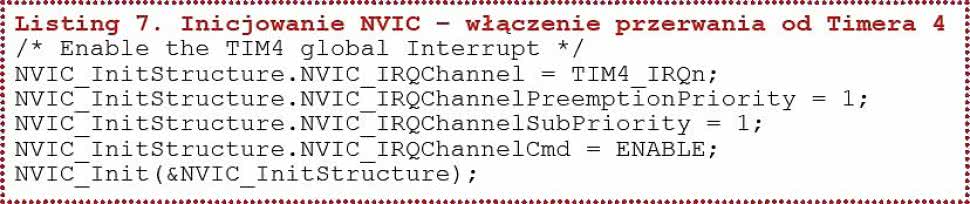
Listing 7. Inicjowanie NVIC - włączenie przerwania od Timera 4
Na koniec przykład programu pokazujący sposób włączenia przerwania licznika. Źródłem będzie Timer4, a konkretnie sytuacja, gdy wartość licznika będzie równa wartości wpisanej w rejestrze porównań CC1. Sposób konfigurowania liczników do różnych trybów pracy w tym, gdy wykorzystywane są rejestry porównań Caption, był opisany w poprzednich odcinkach kursu. Tutaj pokażę tylko fragmenty programu, które trzeba dodać, aby uruchomić mechanizm przerwania.
Na listingu 6 zamieszczono podprogram obsługi przerwania pochodzącego od kanału CC1. Należy go umieścić w pliku stm32f10x_it.c. Na zakończenie obsługi podprogram wyłącza przerwanie. Kolejny fragment programu, który należy dodać do kodu inicjacji NVIC, zamieszczono na listingu 7. Na koniec należy włączyć przerwanie kanału CC1 Timera4 TIM_ITConfig(TIM4, TIM_IT_CC1, ENABLE);
Podobny schemat postępowania obowiązuje w przypadku włączania innych źródeł przerwań.
Ryszard Szymaniak, EP












