 Zaloguj
Zaloguj



Aby moment obrotowy wału silnika, wynikający ze wzajemnego oddziaływania pola magnetycznego magnesu trwałego wirnika i pola magnetycznego stojana, był jak największy, sterownik musi przełączać zasilanie cewek stojana w odpowiednim momencie. Do uzyskania informacji o położeniu wirnika względem uzwojeń stojana często stosowane są czujniki Halla rozmieszczone w obudowie silnika co 120°, w połączeniu z trzema magnesami zamocowanymi na wirniku, również rozmieszczonymi co 120°. Wirujący wirnik sygnalizuje swoje położenie względem stojana tak, jak to zostało pokazane na rysunku 10. Sygnały z czujników Halla są oznaczone jako H1, H2 i H3.
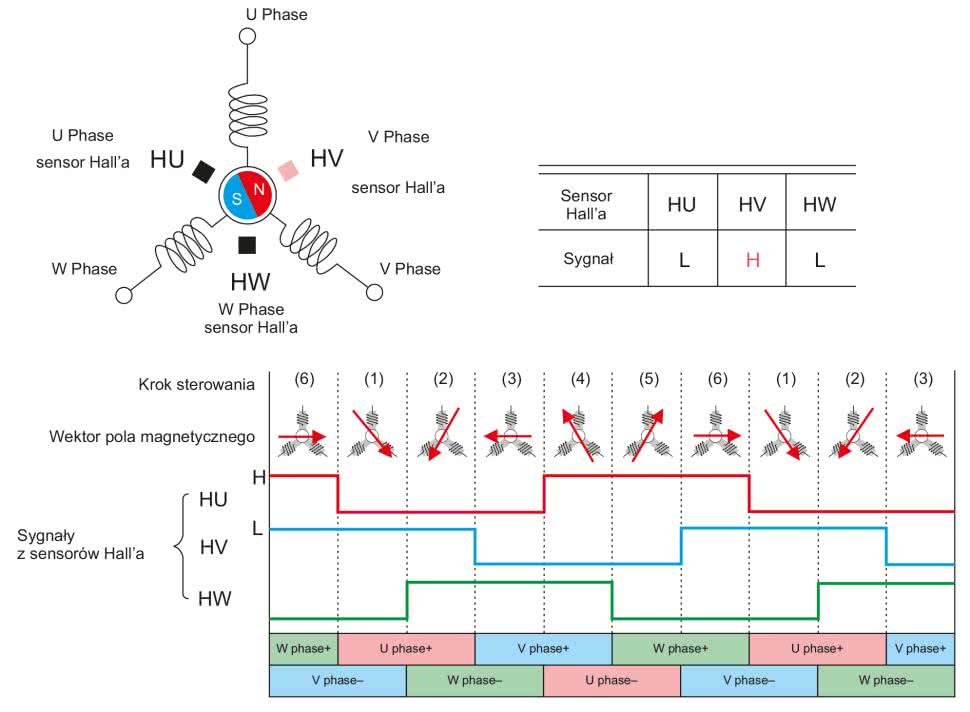
Napięcia na uzwojeniach stojana (fazach) komutowane na podstawie sygnałów z czujników Halla zostały oznaczone jako U, V i W.
Sygnały z czujników Halla wykorzystywane w układach regulacji do określania położenia wirnika względem stojana dodatkowo pozwalają na określenie prędkości wirowania wirnika. Układy sterowania maja wbudowane algorytmy sterowania PI, gdzie parametrem wejściowym jest sygnał błędu zadanej prędkości obrotowej. Blokowy układ sterowania z czujnikami Halla został pokazany na rysunku 11. Pętla regulacji najpierw porównuje zmierzoną prędkość wirowania wirnika z prędkością zadaną. Jeżeli prędkość wirowania jest mniejsza, to układ regulacji PI zwiększa współczynnik wypełnienia sygnału PWM, silnik jest zasilany wyższym napięciem i prędkość obrotowa wzrasta.

Kiedy prędkość jest zbyt duża to współczynnik wypełnienia maleje i prędkość obrotowa maleje. Odpowiednio dobrane parametry sterowania regulatora PI (proporcjonalno-całkującego) pozwalają optymalnie wyregulować pętlę regulacji prędkości tak, aby uniknąć oscylacji zmian prędkości silnika.
Idea sterowania trapezowego ma także wady. Niezbyt dobrze sprawdza się przy małych prędkościach obrotowych. Moment obrotowy z zasady działania podlega fluktuacjom (szarpnięciom). Ponadto czujniki położenia powodują, że silnik ma bardziej skomplikowaną budowę i potrzebuje większej liczby przewodów do połączenia ze sterownikiem i wymaga czyszczenia i przeglądów.
Metoda nie wymagająca czujników
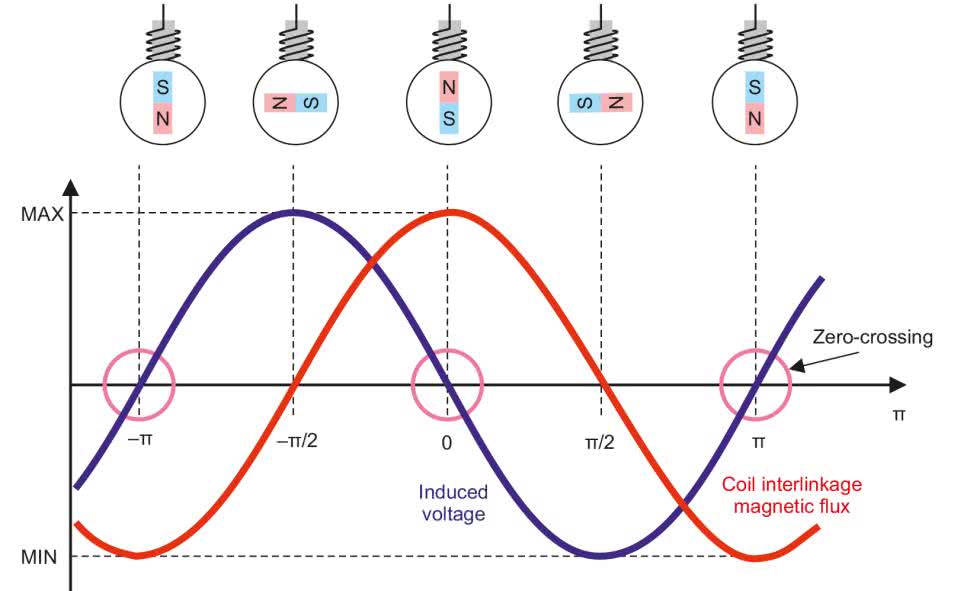
Wymyślono metodę wykrywania położenia wirnika nie wymagającą czujników. Wymaga bardziej rozbudowanego oprogramowania i zastosowania dodatkowych układów peryferyjnych, ale za to silniki są tańsze i bardziej niezawodne w eksploatacji. Wykorzystuje się tutaj ogólnie znane zjawisko indukowania napięcia w uzwojeniu, które jest przenikane przez zmienne w czasie pole magnetyczne (rysunek 12).

Zgodnie z regułą Lenza indukowane napięcie wymusza przepływ prądu w uzwojeniu stojana i powstanie pola magnetycznego przeciwdziałającego strumieniowi magnetycznemu wprawiającemu wirnik w ruch. To szkodliwe zjawisko nazwane BEMF (Back Electromotive Force) jest wykorzystywane do monitorowania położenia wirnika względem stojana. Na rysunku 13 pokazano wykres strumienia magnetycznego przenikającego uzwojenie fazy U (kolor czerwony) i indukowanego napięcia (kolor niebieski). Oś pozioma określa kąt pomiędzy biegunami magnesu i uzwojeniem fazy.
Schemat sterowania trapezowego zakłada, że w każdym momencie są zasilane uzwojenia dwu faz. W zasilanych fazach nie możemy wykryć indukowanego napięcia BEMF, bo są one zwierane przez obwód zasilania fazy. Ale zawsze jest jedna faza nie zasilana i w niej można wykryć położenie wirnika przez detekcję przejścia indukowanego napięcia przez zero tak, jak to zostało pokazane na rysunku 13.
W naszym silniku trójfazowym to przejście przez zero występuje łącznie sześć razy, tj. dwa razy w każdej fazie przy pełnym obrocie. Daje to rozdzielczość położenia co 60° i jest ekwiwalentem rozdzielczości uzyskiwanej przez czujniki Halla.
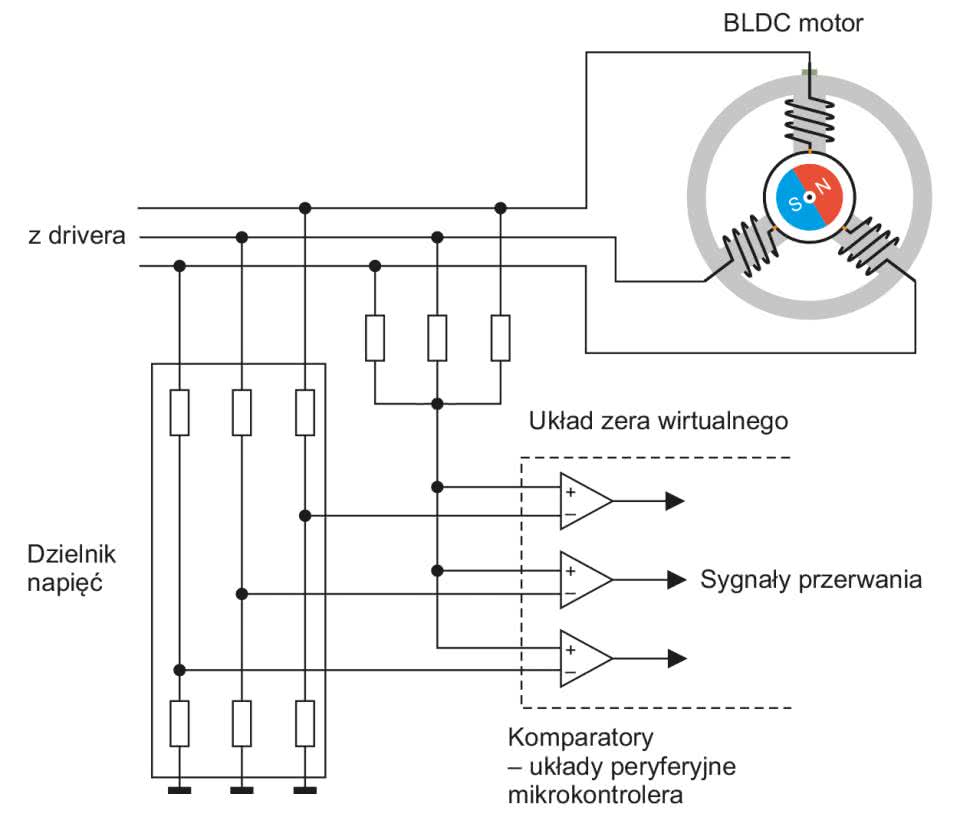
Ponieważ silnik jest połączony w topologii gwiazdy, a punkt środkowy nie jest podłączony do żadnego wyprowadzenia, to nie można bezpośrednio mierzyć napięcia indukowanego na nie zasilanym uzwojeniu silnika. Do tego celu stosuje się dodatkowy układ wirtualnego zera zbudowany z trzech rezystorów. Na rysunku 14 pokazano układ do wykrywania przejścia przez zero, z układem wirtualnego zera i komparatorami.
Wykres napięć indukowanych w uzwojeniach faz w czasie pełnego obrotu silnika pokazano na rysunku 15. Kolorem zielonym zaznaczono zmiany napięcia BEMF w fazie W. Kiedy napięcie indukowane w uzwojeniu nie zasilanym jest równe napięciu wirtualnego zera, to wykrywane jest przejście przez zero. Punkt przejścia przez zero jest przesunięty o względem momentu w którym trzeba włączyć zasilanie kolejnej pary faz. W przypadku rozpatrywanej fazy W na rysunku 15 będzie to wyłączenie fazy V i włączenie fazy W przy cały czas zasilonej fazie U. Mamy tu „prosty” przepis na sterowanie silnikiem BLDC bez czujników położenia. Odliczanie czasu pomiędzy kolejnymi przejściami przez zero pozwala na wyliczanie na bieżąco rzeczywistej prędkości obrotowej silnika.

Sterowanie pracą silnika BLDC nie jest zadaniem łatwym. Jeżeli mamy możliwość swobodnej regulacji napięcia w każdej z faz, to można regulować prędkość obrotową silnika zmniejszając, lub zwiększając prąd wszystkich faz. Można też kształtować przebieg prądów w fazach po to, aby prąd sterujący miał przebieg sinusoidalny i stosować sterowanie trójfazowe. Wtedy każda z faz silnika jest zasilana napięciem sinusoidalnym przesuniętym w fazie o 120°. Wtedy silnik pracuje płynniej i jest cichszy, ale znacznie komplikują się algorytmy sterowania i regulacji. Te zagadnienia będą tematem następnej części artykułu.
Tomasz Jabłoński, EP










