 Zaloguj
Zaloguj




Dwie połączone szeregowo diody stały się znakiem rozpoznawczym wejść (a często też wyjść) układów scalonych wykonanych w technologii CMOS. Jedna jest włączona anodą do masy zasilania i katodą do linii sygnałowej, druga zaś katodą do linii zasilającej, natomiast anodą do chronionego wyprowadzenia cyfrowego. W notach katalogowych można spotkać bardziej rozbudowane układy (rysunek 1), zawierające rezystor między dwoma zespołami takich diod. W literaturze określa się je mianem „clamping diodes”, co jest o tyle mylące, że każdy inny diodowy ogranicznik napięcia bywa nazywany w ten sam sposób.
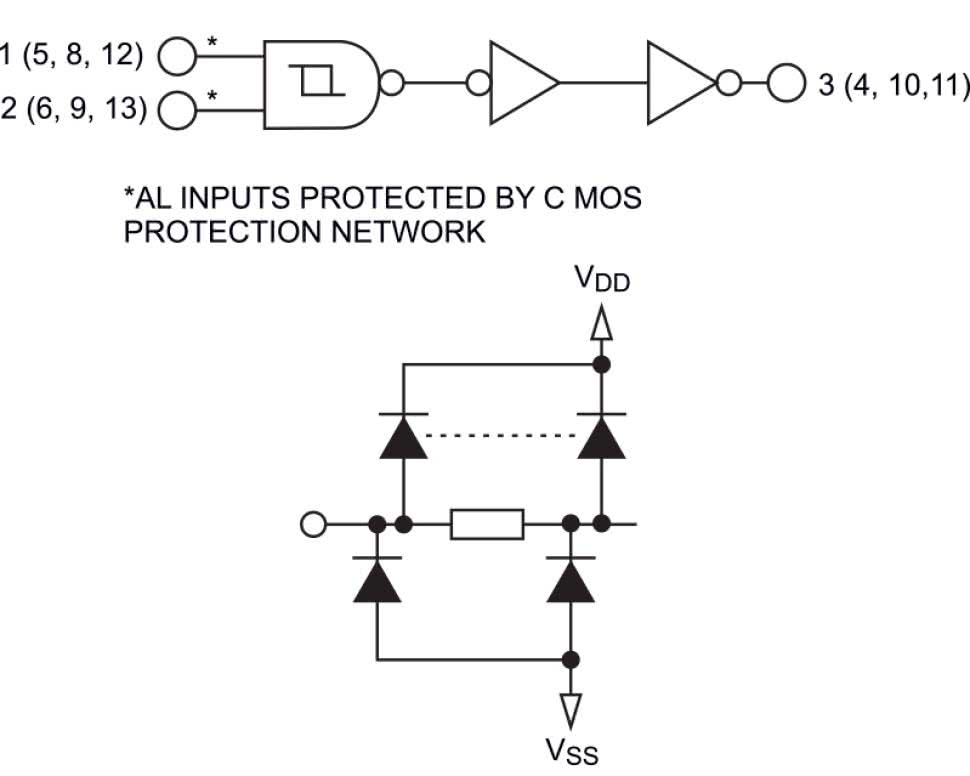
Powodem, dla którego stosuje się takie obwody, jest ochrona przed wyładowaniami elektrostatycznymi, znanymi szerzej pod anglojęzycznym akronimem ESD. Bez tej ochrony każdy układ scalony wyjęty z przewodzącej gąbki niemal natychmiast ulegałby „uśmierceniu” wskutek przebicia delikatnego izolatora podbramkowego w tranzystorach CMOS. Ładunek, który zgromadzi się na wyprowadzeniu, może zostać szybko i „bezboleśnie” rozprowadzony przy użyciu tychże diod.
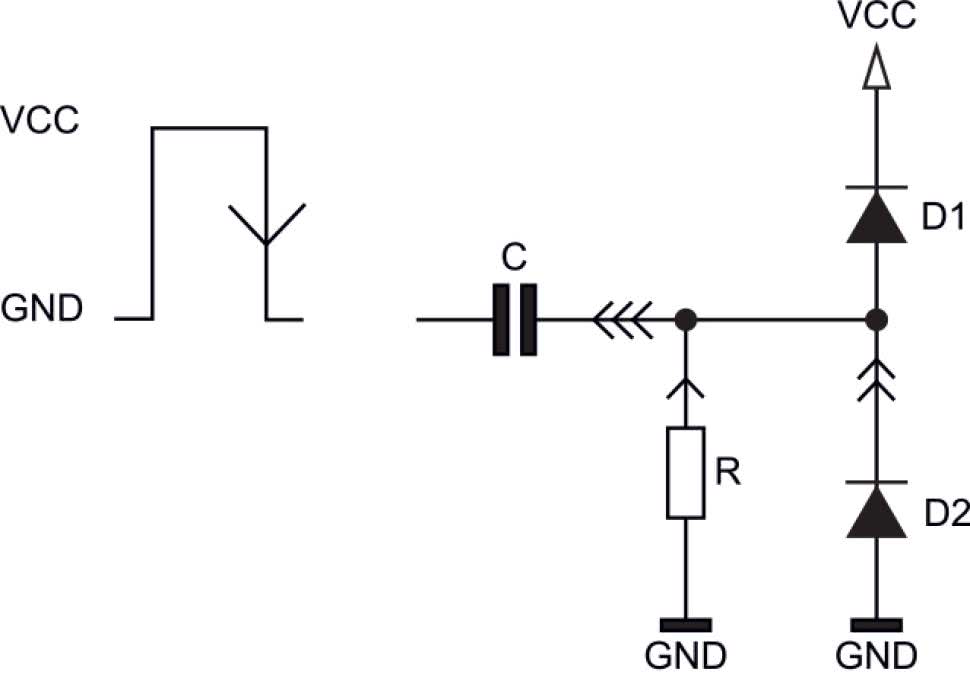
Wspomniane diody znajdują również zastosowanie jako pomocniczy limiter napięcia na wyprowadzeniach. Jeżeli jego wartość, mierzona względem masy, stałaby się ujemna, wówczas otwarciu uległaby dolna dioda, co spowodowałoby „dolanie” prądu do węzła o niskim potencjale. Ta sytuacja z reguły rzadko ma znaczenie, ponieważ spora część naszych układów jest zasilana asymetrycznie – choć istnieją oczywiście wyjątki od tej zasady, na przykład podłączenie do wejścia obwodu różniczkującego RC, choćby takiego z rysunku 2. Kondensator C, który był naładowany po dłużej utrzymującym się stanie wysokim na wejściu układu, nagle wymusza napięcie ujemne na wejściu układu scalonego, ponieważ w chwili nadejścia zbocza ujemnego nie zdąży się przeładować i zadziała jak źródło napięciowe, sprowadzając potencjał swojej prawej okładki poniżej zera. Ot, teoria stanów nieustalonych, nic więcej.
Jednak częściej doprowadzamy do otwierania się diody górnej, która ogranicza napięcie na danym wyprowadzeniu – a jakże! – od góry. Jeżeli potencjał wzrośnie powyżej napięcia zasilającego, do którego jest owa dioda podłączona, wówczas otworzy się ona i odprowadzi prąd do szyny zasilającej, zapobiegając dalszemu wzrostowi potencjału. I w tym miejscu większość podręczników zamyka temat: koniec, nie da się więcej, przecież tak działa zwykły limiter diodowy! Owszem, może działać w ten sposób, ale z uwzględnieniem kilku zastrzeżeń, o których już się zbyt często nie mówi.
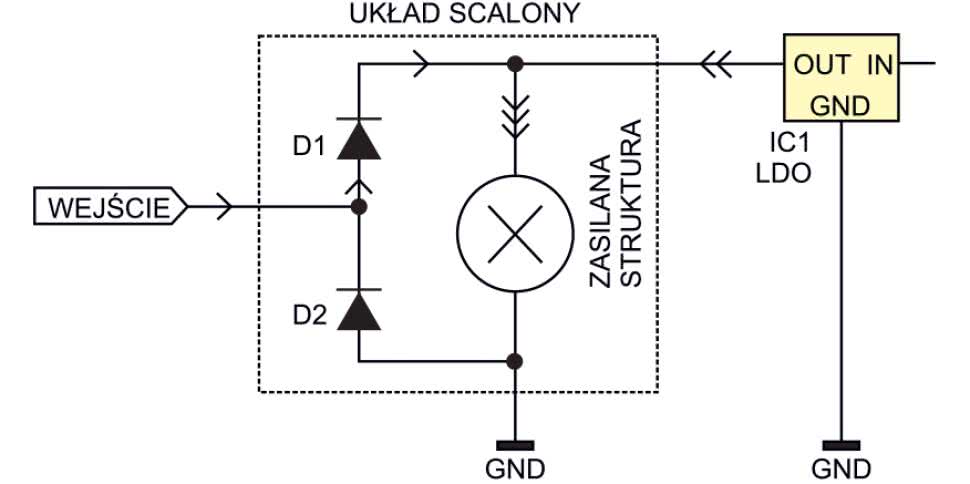
Według teorii, prąd przepływający przez otwartą górną diodę wpływa do linii zasilającej. Jednak nie może on tak sobie zniknąć – zasada zachowania ładunku elektrycznego nadal nas zobowiązuje. Wspomniany prąd rozpływa się więc po całym układzie i uczestniczy w jego zasilaniu. Skoro pojawia się dodatkowe źródło zasilania, to stabilizator przeznaczony do zasilania tego obwodu wypuszcza z siebie prąd o mniejszym natężeniu, ponieważ zależy mu na utrzymaniu stałego potencjału linii zasilającej – rysunek 3. Jeżeli źródłem energii jest bateria lub akumulator, wówczas wypływa z nich prąd o niższym natężeniu. Musi zostać spełnione prądowe prawo Kirchhoffa: skoro prąd pobierany przez układ nie zmienia się, a w węźle pojawia się jego dodatkowe źródło, to prąd wypływający z pierwotnego źródła musi zmaleć.
Wszystko gra, dopóki mamy układ pobierający relatywnie wysoki prąd (kilkadziesiąt czy kilkaset miliamperów), zaś prąd – dopływający okazjonalnie przez którąś z diod zabezpieczających pracujący w nim układ scalony – ma natężenie rzędu kilku miliamperów. Sytuacja jednak mocno się komplikuje, kiedy prąd pobierany przez układ również jest niewielki, a nawet niższy od tego, który może wpłynąć przez opisane diody. Wówczas napięcie zasilające układ jest w stanie wzrosnąć nawet powyżej dopuszczalnej dlań wartości, co w skrajnym przypadku może skończyć się jego uszkodzeniem.
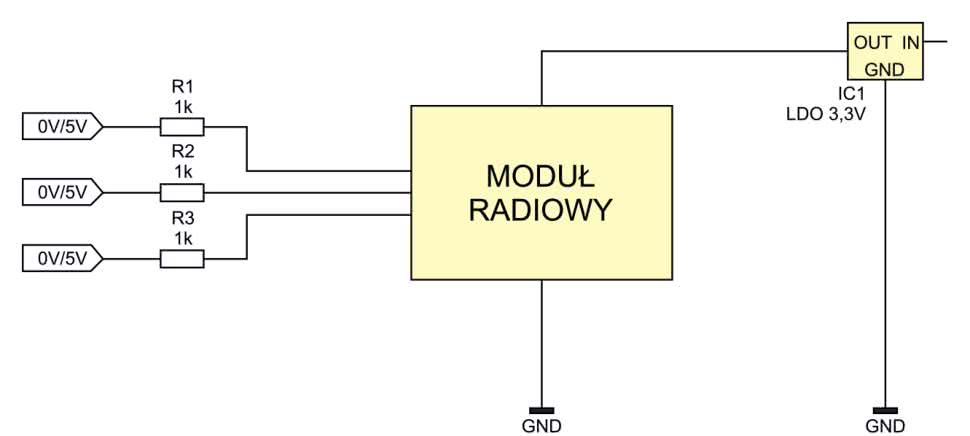
Taka sytuacja przydarzyła mi się dawno temu w prototypowej serii układów zawierających moduł radiowy RFM69. Moduł ten był zasilany napięciem 3,3 V ze stabilizatora LDO (maksymalne napięcie zasilające 3,9 V, rekomendowane do 3,6 V), zaś mikrokontroler z nim się komunikujący – napięciem 5 V.
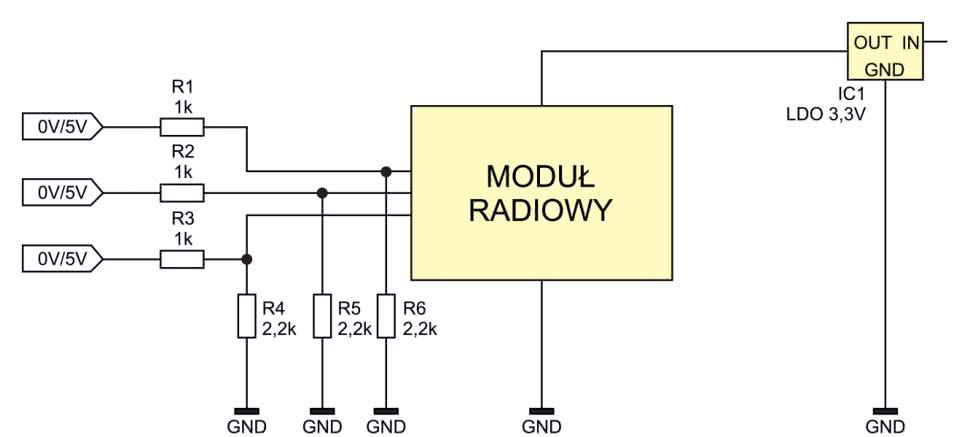
Między nimi znajdowały się trzy linie sygnałowe, które wchodziły do układu radiowego, więc wartość szczytowa na nich była wyższa od napięcia zasilającego. Pamiętając o różnicy poziomów, dodałem w szereg rezystory 1 kΩ – mogłem sobie na to pozwolić, ponieważ komunikacja nie była zbyt szybka, choć około 100 kHz częstotliwości zegara musiałem mieć zapewnione. Jednocześnie nie chciałem wprowadzać dzielników napięciowych na każdej z linii sygnałowych, ponieważ zależało mi na odzyskaniu miejsca na płytce – przecież diody zabezpieczające wejścia modułu radiowego ograniczą napięcie. Ich prąd również jest ograniczony przez szeregowe rezystory, zatem kilka miliamperów rozpłynie się po układzie i niczym nie trzeba się martwić... Rysunek 4 zawiera uproszczony schemat tej części układu.
Partia testowa urządzeń liczyła dziesięć sztuk. W kilku moduł radiowy przestał reagować niemal natychmiast po włączeniu zasilania. Niektóre działały dłużej, ale był to raczej czas rzędu kilku minut. Część z nich z kolei wydawała się działać poprawnie. Kiepskie wyniki jak na urządzenie, które docelowo miało zostać wyprodukowane w setkach sztuk. Rozpoczęły się wielkie poszukiwania możliwej przyczyny, zaś zmiana dostawcy modułów radiowych nastąpiła kilkukrotnie. Próbowałem częściej zerować te moduły, zmniejszyć częstotliwość sygnału zegarowego podczas komunikacji z nimi (choć rozwiązania tego nie mogłem docelowo pozostawić w projekcie), ale wszystko na marne. Pojawiła się frustracja wywołana brakiem jednoznacznej przyczyny – i zniecierpliwienie klienta.
Dopiero po czasie skojarzyłem, że w stanie gotowości (Standby mode) moduł pobiera prąd o natężeniu nie większym niż 1,5 mA. Tymczasem ja „pchałem” do niego, za pośrednictwem diod zabezpieczających, prawie trzy razy tyle. Oczywiście stabilizator LDO nie jest przystosowany do tego, by „wciągać” prąd, może go jedynie z siebie „wyrzucać”. Kiedy więc dochodziło do pojawienia się stanu wysokiego na którejkolwiek z linii sterowanych przez mikrokontroler, prąd wychodzący ze stabilizatora spadał niemal do zera. Natomiast przy dwóch liniach, napięcie na pinie zasilającym moduł RFM69 wzrastało powyżej 4 V…
Chcąc nie chcąc przeprosiłem się z dzielnikami napięcia i problem zniknął, jak ręką odjął. Wystarczyło dołożenie rezystorów o wartości 2,2 kΩ za każdym z rezystorów szeregowych do masy, by napięcie nie wzrastało już powyżej niebezpiecznej dla modułu wartości (szczegóły obrazuje rysunek 5). Przy okazji zmalała rezystancja sterująca pojemnością wejściową układu RFM69. Problem z głowy? Owszem, ale to nie koniec moich poszukiwań na ten temat. Ciekawiło mnie, w jaki inny sposób można byłoby podobny problem rozwiązać.
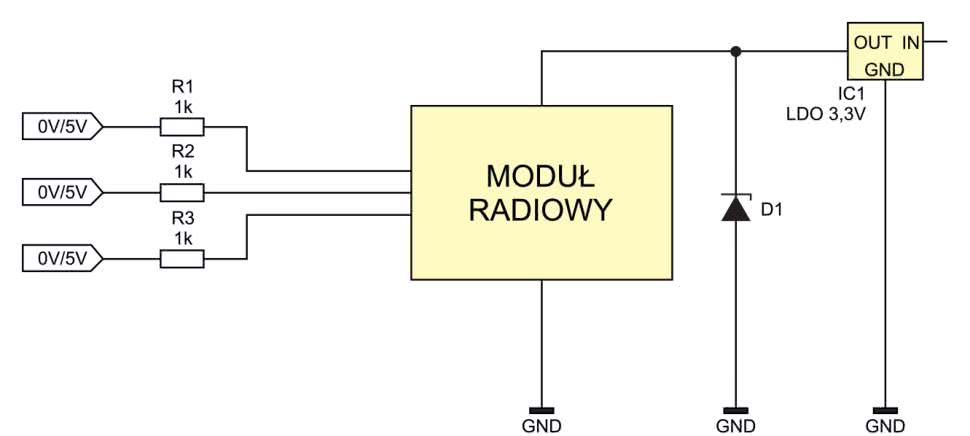
Dodanie diody typu transil między masę a zasilanie takiego układu (rysunek 6) w teorii powinno zadziałać poprawnie, ponieważ – przy próbie zwiększenia napięcia zasilającego powyżej napięcia jego przebicia – otworzy się on i przejmie na siebie nadmiar prądu. Jest to jakieś rozwiązanie, lecz trzeba dobrze dobrać wspomniany element – tak, by w stanie prawidłowej pracy był zatkany (przy napięciu 3,3 V), zaś już kilkaset miliwoltów powyżej tej granicy (przy napięciu 3,9 V lub niżej) był zdolny do przewodzenia prądu o natężeniu kilku miliamperów. Nie jest to proste, zważywszy na fakt, że napięcie przebicia zależy od temperatury. Popularne diody TVS, które służą do zabezpieczania linii 3,3 V, przewodzą prąd o natężeniu 5 mA przy znacznie wyższym napięciu. Przykładowo, dioda PESD3V3U1UA.115 ma prąd upływu nieprzekraczający 1 μA przy 3,3 V, ale prąd 5 mA osiąga dopiero przy napięciu 4,5...6,8 V, czyli – w opisywanym zastosowaniu – nieakceptowalnie wysokim. Można byłoby ją zastąpić bardziej precyzyjnym ogranicznikiem, stosując chociażby układ TL431, lecz wtedy cały ów dodatkowy obwód staje się większy, droższy i bardziej złożony, niż proste rezystory tworzące dzielniki napięcia na liniach sygnałowych.
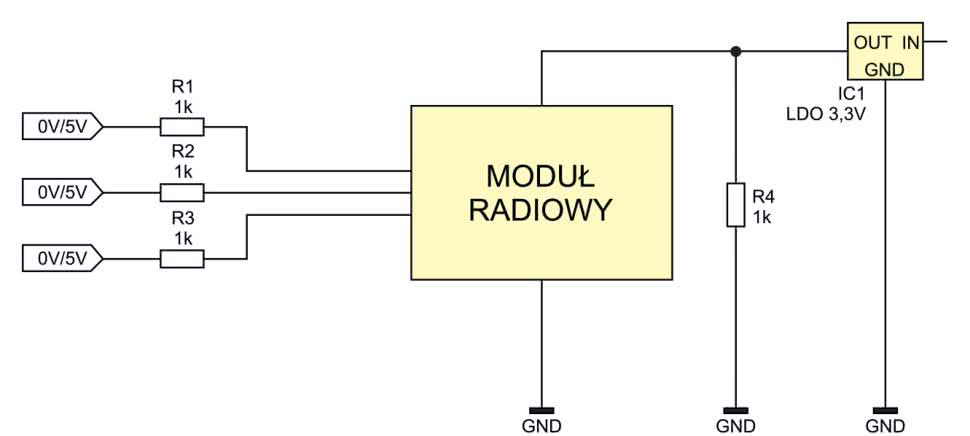
Wpadłem na jeszcze jeden pomysł, zdecydowanie prostszy do wdrożenia. Skoro problemem jest fakt, że odbiornik prądu z węzła pobiera go zbyt mało, to trzeba dodać jeszcze jedną gałąź, którą ten prąd mógłby sobie odpływać do masy, najlepiej stale. Na szczęście w omawianym układzie energooszczędność nie była dla mnie priorytetem. I tak oto doszedłem do... zwykłego rezystora o wartości 1 kΩ, który włączyłem między wyjście stabilizatora 3,3 V a masę – co ilustruje rysunek 7. Wprawdzie przez większość czasu pobierał prąd o natężeniu 3,3 mA, lecz – przy załączeniu się wszystkich trzech linii sygnałowych w stan wysoki – gwarantował odprowadzenie nadmiarowego prądu.
W tym układzie usunąłem zaledwie dwa rezystory (w porównaniu z „kanonicznym” rozwiązaniem), lecz przy magistrali prowadzącej większą liczbę sygnałów ta oszczędność na elementach byłaby jeszcze większa. Warto również rozważyć dobranie rezystorów szeregowych o tak dużej rezystancji, aby przepływający przez nie prąd był mniejszy, niż pobierany przez niskonapięciowy układ – lecz to z kolei odbija się negatywnie na szybkości transmisji. Nie próbuję namawiać Czytelników do skąpstwa, raczej prezentuję alternatywne rozwiązania w sytuacji, kiedy na płytce pozostało ekstremalnie mało miejsca.
Michał Kurzela, EP












