 Zaloguj
Zaloguj




Projektant elektroniki, który nigdy wcześniej nie próbował przedłużyć życia układu zasilanego bateryjnie lub akumulatorowo, może nie zdawać sobie sprawy z różnych problemów, ograniczeń i trików w świecie ultraniskiego poboru prądu. Może też się zastanawiać, po co w ogóle redukować pobór energii. Przecież nie brakuje relatywnie tanich baterii i akumulatorów, ogniwa fotowoltaiczne są produkowane masowo, a każdy potencjalny użytkownik danego produktu ma pod ręką kilka ładowarek USB i innych. Warto zatem omówić parę przykładów z życia wziętych, by zobaczyć praktyczne zalety zaciskania pasa w obszarze poboru mocy.
Przykładem bliskim sercom (i portfelom) wielu Polaków są podzielniki ciepła. Te zasilane bateryjnie urządzenia mierzą (w teorii, bo praktyka zależy od uczciwości zarządcy systemu) realne zużycie energii na ogrzewanie mieszkania, co pozwala pracownikom administracji obliczyć wysokość rachunku za to ogrzewanie. Teoretycznie rozwiązanie to pozwala tym, którzy wolą niższą temperaturę, płacić mniej – podczas gdy preferujący temperatury „tropikalne” będą musieli liczyć się z wyższymi rachunkami. Podzielnik jest relatywnie prostym układem, zawiera bowiem tylko kilka czujników temperatury, czujniki chroniące przed sabotażem ze strony lokatorów oraz układ do łączności radiowej. Na jednej, niewymiennej baterii takie urządzenie powinno pracować nawet dekadę lub dłużej, dlatego zaprojektowane jest z myślą o maksymalnym ograniczeniu poboru energii, przy czym największym problemem okazuje się tu ograniczenie prądu zasilania przez sam nadajnik.
Innym praktycznym przykładem może być opaska monitorująca aktywność fizyczną użytkownika. Popularne (i tanie) trackery często wymagają niemal codziennego ładowania wbudowanego akumulatora litowo-jonowego. Głównym „prądożercą” jest zwykle czujnik tętna i natlenienia krwi – zmiana częstotliwości pomiaru na znacznie niższą może wydłużyć czas między ładowaniami do nawet miesiąca. Drugim elementem opaski pochłaniającym dużo energii jest układ łączności Bluetooth, zwłaszcza gdy opaska ma pokazywać powiadomienia ze smartfona. Transceiver potrafi zredukować czas pracy urządzenia do mniej niż doby. Na drugim końcu skali znajdują się trackery, które nie mają wspomnianych wcześniej funkcji ani nawet kolorowego wyświetlacza LCD czy OLED, za to na jednej, miniaturowej baterii pracują ponad rok.
Osobną klasę urządzeń stanowią układy monitorujące środowisko naturalne, zwłaszcza te przeznaczone do pracy bez nadzoru przez długie miesiące, z dala od cywilizacji. Trudno będzie przekonać dzikie zwierzę, by – poza urządzeniem śledzącym jego migrację – nosiło też „parasol” z ogniw fotowoltaicznych. Takie konstrukcje trzeba bezwzględnie zasilać bateryjnie; muszą być one również małe, lekkie i odporne na możliwe uszkodzenia. Podobnie urządzenia monitorujące środowisko naturalne na terenach lasów czy parków narodowych nie powinny się rzucać w oczy ani tym bardziej szpecić naturalnego piękna leśnych pejzaży nieestetycznymi źródłami energii odnawialnej. W obu wypadkach wyzwaniem będzie łączność radiowa, przy czym śledzenie zwierząt może wymagać odbiornika GPS, który również potrafi być prądożerny.
Mógłbym przywołać o wiele więcej podobnych przykładów. Zamiast tego przejdę do analizy rozwiązań problemu, która jest tu istotniejsza niż wskazanie gotowych urządzeń. Zaczniemy od odrobiny teorii i przeglądu not katalogowych, ale będziemy operować na praktycznych przykładach.
Wymagania układu i budżet energetyczny
Rozpoczynając nowy projekt wymagający oszczędzania energii, warto przyjąć kilka podstawowych założeń dotyczących: czasu pracy urządzenia, dostępnego miejsca na źródło zasilania oraz jego budżetu energetycznego. Często właśnie rozmiar zdecyduje o tym, jaki będzie nasz budżet energetyczny i jak długo urządzenie będzie mogło pracować bez wymiany baterii lub doładowywania akumulatora. Jeśli jednak wymiary obudowy nie mają znaczenia, a liczy się czas pracy, to możemy zacząć od określenia potrzebnego budżetu (zamiast dostępnego) – i dobrać najmniejsze źródło zasilania, jakie da się znaleźć.
Drugą, równie istotną informacją są wymagania względem funkcjonalności urządzenia, a także czasu i częstotliwości jej realizacji. Oczywiste jest bowiem, że układ pracujący cały czas będzie potrzebował średnio o wiele więcej energii niż układ aktywowany sporadycznie. Czasem projektant (lub zleceniodawca projektu) zakłada, że układ musi pracować non stop, podczas gdy w rzeczywistości wystarczy praca cykliczna. Dobrym przykładem będzie tu układ do śledzenia migracji dzikich zwierząt. Nie musimy bowiem wiedzieć, gdzie zwierzę jest w każdej minucie, często wystarczy zanotowanie lokalizacji raz na godzinę albo rzadziej. Informacje te można też zbierać w pamięci układu i przekazywać raz na dobę lub rzadziej. Podobnie monitor jakości powietrza nie musi jej badać częściej niż co kilka minut, choć częstotliwość zdawania raportów może być wyższa. Zupełnie inaczej wygląda sytuacja urządzenia medycznego w rodzaju rozrusznika serca czy stymulatora mózgu – takie urządzenie nie dość, że pracuje przez cały czas, monitorując stan pacjenta, to jeszcze musi być na tyle małe, by dało się wszczepić i jednocześnie zapewniać 6...10 lat nieprzerwanej pracy. Ale nawet taki system w rzeczywistości nie pracuje cały czas. W praktyce układ monitorujący dokonuje pomiarów z częstotliwością adekwatną do pasma badanego parametru życiowego (rytmu serca czy fali mózgowej), po czym – po wykryciu niewłaściwej wartości – podejmuje właściwe działanie. W czasie (tj. między kolejnymi akwizycjami) gdy układ nie musi nic robić, zazwyczaj „śpi”, redukując zapotrzebowanie na energię.
Zatem: jak można określić potrzebny lub/i dostępny budżet energetyczny? Dostępny budżet zależy od użytego źródła energii. Za to wymagany budżet jest determinowany przez szereg różnych czynników. W przypadku mikrokontrolerów będzie to napięcie zasilania, częstotliwość taktowania, użyte peryferia oraz procent czasu, jaki mikrokontroler spędza w stanie uśpienia (oraz – w niektórych rodzinach – od głębokości uśpienia). Inne elementy, np. czujniki, przetworniki i wzmacniacze operacyjne, też mają różne zapotrzebowanie na energię, zależnie od napięcia zasilania i od tego, czy aktywnie pracują, czy też są w stanie wyłączenia (wiele układów obecnie wyposażanych jest w taką funkcjonalność). Nawet rodzaj użytych kondensatorów i wartości rezystorów mogą mieć znaczący wpływ na pobór prądu. Standardową praktyką stało się na przykład umieszczanie w projekcie przynajmniej jednego kondensatora elektrolitycznego do filtrowania zasilania, choć często będzie ich nawet kilka...kilkanaście. Niektórych Czytelników może zaskoczyć fakt dość wysokiego prądu upływu tego typu kondensatorów.
Wspomniałem wcześniej, że pobór prądu w przypadku mikrokontrolerów zależy od napięcia zasilania, taktowania, używanych peryferiów i czasu wykonywania programu oraz czasu uśpienia układu. Czas wykonywania programu jest dość trudny do określenia, zwłaszcza gdy kod napisany został w języku wysokopoziomowym. Okres uśpienia bywa łatwiejszy do określenia, bo zwykle decyduje o nim czas potrzebny któremuś z peryferiów do realizacji swojego zadania lub timer (np. SysTick bądź Watchdog). Dobrym przykładem może okazać się akwizycja pomiarów dokonywana przez przetwornik ADC. Tematem określania i sprawdzania timingów wykonywania programu oraz uśpienia zajmiemy się później.
W notach katalogowych znajdziemy pobory prądu układów w różnych sytuacjach i przy różnych napięciach zasilania, wyrażonych w (zazwyczaj) miliamperach lub mikroamperach. Załóżmy, że chcemy wiedzieć, ile energii układ potrzebuje na sekundę lub godzinę, jeśli na przykład przez 2,7 ms pobiera 21 μA, a potem przez 120 ms jest uśpiony i pobiera 1,1 μA. Obliczenia są zaskakująco proste. Najpierw sumujemy czas aktywnej pracy oraz czas uśpienia – i obliczamy ich udział:
120 ms + 2,7 ms = 122,7 ms
1/122,7 ms · 2,7 ms = 0,0022
1/122,7 ms · 120 ms = 0,9977
Teraz możemy przemnożyć te udziały w czasie przez pobierany prąd i je zsumować:
(0,0022 · 21 μA) + (0,9977 · 1,1 μA) = 1,14367 μA
Jest to średni pobór prądu na sekundę. Możemy tę wartość przeliczyć na (mikro)waty, mnożąc przez napięcie zasilania układu – lub przeliczyć na miliamperogodziny. Do uzyskanej wartości można też doliczyć pobór prądu przez poszczególne układy peryferyjne, zarówno w czasie pracy, jak i bezczynności.
Warto te obliczenia przeprowadzić w odniesieniu do różnych napięć zasilania. Wracając do przykładu, policzmy zapotrzebowanie energii w mAh:
1,14367 μA · 60 · 60 = 4,117212 mAh
To całkiem dobry wynik przy naszych założeniach. Oznacza on, że na parze baterii alkalicznych w rozmiarze AAA (typowa pojemność wynosi 1200 mAh) taki układ będzie pracował około 12 dni, przy założeniu, iż pobór prądu nie spadnie wraz ze spadkiem napięcia zasilania, a baterie zostaną całkowicie rozładowane. Jeśli potrzebny będzie dłuższy czas działania, można oczywiście użyć pojemniejszych baterii albo alternatywnego źródła zasilania. Warto jednak rozważyć optymalizację projektu pod kątem poboru prądu oraz czasu wykonywania programu.
Baterie i akumulatory
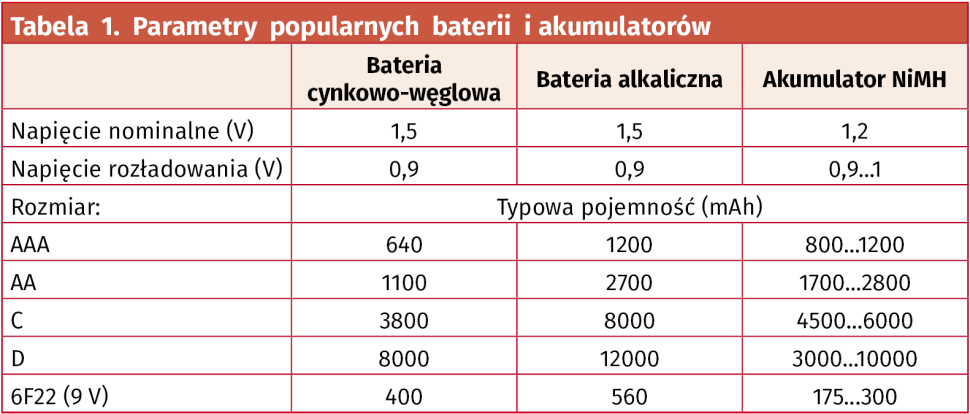
Zasilanie urządzenia z baterii lub akumulatorów wydaje się dość prostym rozwiązaniem. Na rynku nie brakuje ogniw o najróżniejszych kształtach, pojemnościach, napięciach i składach chemicznych. Temat jest na tyle obszerny, że można poświęcić mu nawet kilka artykułów, ale na nasze potrzeby wystarczy proste zestawienie kluczowych parametrów, by mieć jakie takie pojęcie o dostępnych opcjach. Zacznijmy zatem od najpopularniejszych typów baterii i akumulatorów (tabela 1).
Jak widać, popularne swego czasu baterie typu 6F22 mają wyjątkowo małą pojemność, a ich jedyną zaletę stanowi dość wysokie napięcie nominalne wynoszące 9 V. Bateria taka bowiem zawiera w sobie sześć mniejszych ogniw połączonych szeregowo. Obecnie większość układów zoptymalizowana jest do pracy z niższymi napięciami, a i nie brakuje na rynku optymalnych, energooszczędnych przetwornic do układów potrzebujących napięć wyższych.
Drugą, bardzo popularną rodziną ogniw stosowanych w przenośnych urządzeniach, zwłaszcza gdy mają być one kompaktowe, stanowią baterie guzikowe, zwane też pastylkowymi lub zegarkowymi. Na rynku dostępne są liczne typy ogniw, różniące się użytymi materiałami elektrod oraz elektrolitu, co wpływa też na ich charakterystyczne napięcia i pojemności. Tabela 2 prezentuje porównanie ogniw jednego, popularnego rozmiaru R44, czyli 11,6 mm średnicy i 5,4 mm grubości. Prefiks określa typ, a opcjonalny sufiks dodatkowe właściwości.
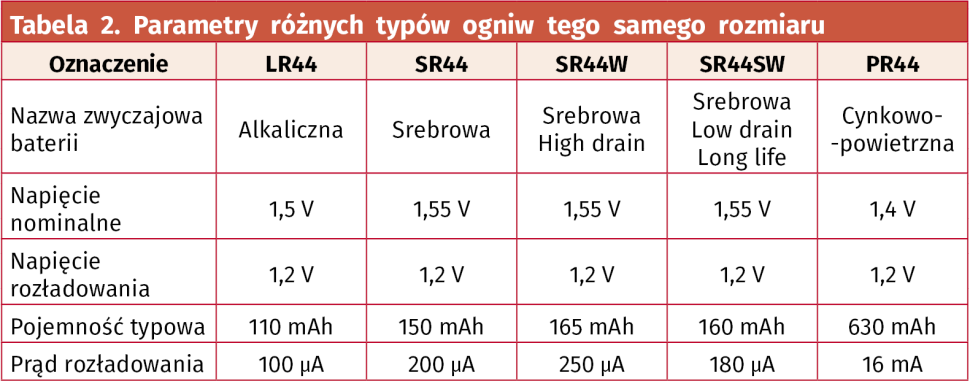
Ogniwa cynkowo-powietrzne w tym zestawieniu wydają się bardzo atrakcyjne, ale mają one istotną wadę – wysokie samorozładowanie po zerwaniu plomby. O ile poprawnie przechowywane baterie mogą zachować pojemność przez kilka lat, o tyle z chwilą zdjęcia plomby i wystawienia elektrolitu na działanie powietrza ogniwo będzie pracować zaledwie przez kilka tygodni. Baterie te znalazły zastosowanie w aparatach słuchowych, gdzie często potrzebna jest nie tylko duża pojemność, ale także spora wydajność prądowa.
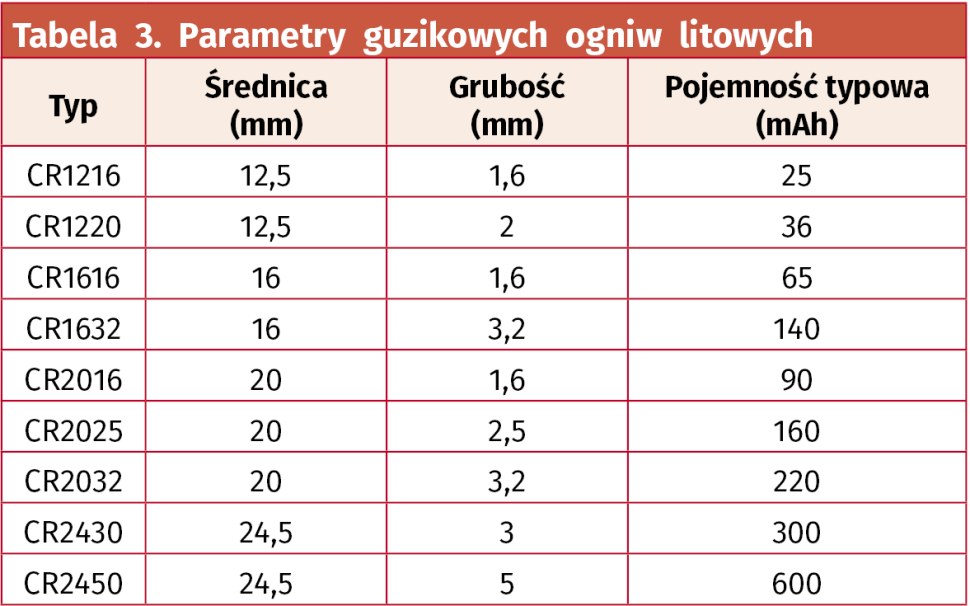
Warto spojrzeć jeszcze na rodzinę guzikowych baterii litowych, których oznaczenie zaczyna się od litery C. Baterie te są relatywnie tanie i występują w szerokiej gamie rozmiarów, a przy tym oferują wyższe napięcie zasilania. Tabela 3 prezentuje parametry ogniw tego typu w różnych rozmiarach. Napięcie nominalne wynosi 3 V, a napięcie ogniwa rozładowanego 2 V.
Akumulatory litowo-jonowe i litowo-polimerowe są istotnie zróżnicowane pod względem pojemności i rozmiarów – od płaskich ogniw, niewiele większych od baterii LR44, po ogniwa większe nawet od baterii typu D. Opisywane źródła energii oferują dobry stosunek pojemności do rozmiaru, z napięciem w pełni naładowanego ogniwa wynoszącym 4,2 V. To właśnie te akumulatory pozwoliły na stworzenie samochodów elektrycznych i hybrydowych, które są użyteczne; ponadto niemal każde urządzenie mobilne używa właśnie tego typu akumulatorów. Niestety, wadami opisanych ogniw są: ich wątpliwa ekologia, spore zagrożenie pożarowe w razie zwarcia, a do tego ryzyko, że uszkodzone lub wyeksploatowane ogniwa pryzmatyczne, zamknięte w foliowych opakowaniach, rozsadzą urządzenie, w którym się znajdują. Mimo to cieszą się one niesłabnącą popularnością – i na rynku nie brakuje przeznaczonych do nich układów scalonych i modułów zarządzających, zabezpieczających czy też balansujących.
W poszukiwaniu oszczędności (energii)
Możliwości ograniczenia poboru prądu zależą od wytycznych projektowych. Jeśli docelowe zastosowanie wymaga mikrokontrolera, można dobrać układ mniej lub bardziej energooszczędny, zależnie od potrzebnych peryferiów. Jeśli konieczne jest przetwarzanie sygnałów analogowych, można dobrać potrzebne wzmacniacze operacyjne, przetworniki ADC czy DAC i inne elementy o niskim poborze prądu. Ba, nawet wybór rzędu wielkości rezystorów może znacząco poprawić energooszczędność. Podobnie rzecz się ma w przypadku wyboru sensorów: współcześnie produkowane komponenty często oferują dużą dokładność i niski pobór prądu, głównie dzięki rynkowi smartfonów i smartwatchy.
Kolejnym, istotnym źródłem niepotrzebnych strat są liniowe stabilizatory napięcia. Nie powinno się ich stosować wcale, chyba że jest to wymóg projektowy nie do przeskoczenia. Lepszym rozwiązaniem okazują się przetwornice impulsowe. Z jednej strony mają wysoką sprawność (przekraczającą 85...90%) i pozwalają uzyskać napięcia przewyższające napięcie zasilania, a także zmieniać jego polaryzację, z drugiej zaś – generują zakłócenia, co w pewnych sytuacjach nie jest cechą pożądaną. Same pobierają też pewien prąd, nawet w stanie uśpienia (jeśli ta funkcjonalność jest dostępna). Dlatego rozwiązaniem optymalnym okazuje się taki dobór komponentów, by stosowanie przetwornic stało się całkowicie zbędne. Należy wówczas brać pod uwagę minimalne napięcie pracy, dostarczane przez źródło energii, na przykład baterię lub akumulator, zbliżające się do stanu całkowitego rozładowania.
Największymi „prądożercami” będą jednak układy łączności radiowej. Im większy wymagany zasięg i im wyższa wymagana prędkość transmisji, tym większą moc musi mieć układ nadawczy. Dobrej klasy układy LoRa potrafią osiągnąć zasięg kilku kilometrów, jeśli po drodze nie ma żadnych przeszkód, ale okupione jest to poborem 20...50 mA przy napięciu zasilania 2,8...3,6 V. Optymalnym rozwiązaniem w tej sytuacji staje się włączanie zasilania układu radiowego tylko na czas transmisji i wysyłanie większych pakietów informacji, ale rzadziej. Powodem jest fakt, że od włączenia zasilania do osiągnięcia gotowości do nadawania mija trochę czasu. Powtarzanie tej sekwencji startowej w przypadku każdego pakietu do przesłania znacząco podnosi koszt energetyczny ponoszony przez urządzenie. Jeśli łączność odbywa się na popularnym paśmie ISM, jak na przykład 2,4 GHz, warto wybrać któryś z wyższych kanałów, gdyż większość inżynierów i zwykłych użytkowników nie zmienia domyślnego kanału (widać to, gdy sprawdza się zajętość kanałów Wi-Fi). Zwykle pierwszy i ostatni kanał mają po kilka(naście) pozycji, podczas gdy kanały bliższe środka dostępnego pasma są często praktycznie puste. Odnośnie do używania samego Wi-Fi, to ta forma łączności jest wyjątkowo prądożerna, gdyż znalezienie sieci, autoryzacja, a następnie znalezienie docelowego serwera, autoryzacja na nim, by na końcu przesłać kilka(set) bajtów może trwać nawet kilka sekund, z czego zaledwie promil stanowić będzie przekazanie właściwego pakietu danych. Dlatego używanie sieci Wi-Fi w przypadku urządzeń IoT ma sens praktycznie tylko wtedy, gdy urządzenia te są na stałe włączone do instalacji elektrycznej.
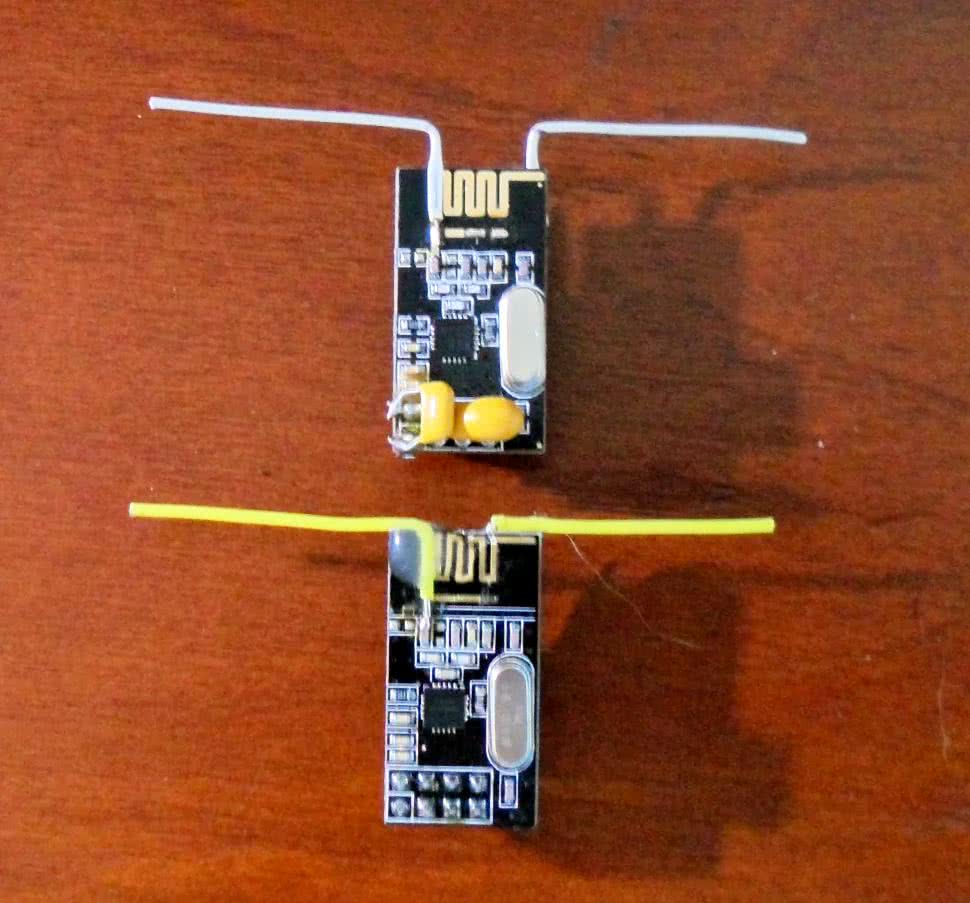
Warto też pamiętać, że anteny mikropaskowe stosowane w gotowych modułach radiowych mają wzmocnienie 4...8 dB, ale przy tym ów parametr zależy mocno od orientacji – zachowują się one nieco podobnie do anten kierunkowych. W dodatku nie każdy taki moduł został wykonany poprawnie. Dla przykładu wystarczy spojrzeć na popularne wśród hobbystów chińskie klony modułów z układem nRF24L01+ firmy Nordic. Transceivery te mają mocno ograniczony zasięg przez błędnie wykonaną antenę mikropaskową i źle dobrane elementy dopasowujące. Jeden z hobbystów, sfrustrowany zasięgiem wspomnianych układów, zmodyfikował swoje egzemplarze, dodając im prosty dipol (fotografia 1), co zwiększyło zasięg ponaddwukrotnie.
Moduły te są relatywnie proste w użyciu i – przy odpowiednim doborze kanału oraz ograniczeniu prędkości transmisji – potrafią osiągać zasięg liczony w setkach metrów, pobierając prąd na poziomie 11,3 mA w trybie nadawania oraz 13,5 mA w trybie odbioru. Układy oferują też specjalny tryb pracy pozwalający przesłać do 32 bajtów danych, z automatyczną retransmisją i automatycznym potwierdzeniem odbioru, przy czym firma Nordic chwali się, że w tym trybie średni pobór prądu wynosi tylko 0,1 mA. W przypadku urządzenia zasilanego bateryjnie to nadal może być trochę za dużo.
Na zakończenie
Oszczędzanie energii jest zagadnieniem dość szerokim, zwłaszcza jeśli weźmiemy pod uwagę bogactwo ofert producentów komponentów elektronicznych. W następnych częściach cyklu przyjrzymy się bliżej tym ofertom oraz poznamy różne triki przydatne w oszczędzaniu energii. W przygotowaniu jest też przynajmniej jeden praktyczny projekt, demonstrujący omawiane zagadnienia, wraz z pomiarami rzeczywistego poboru prądu. Zajmiemy się ponadto poszukiwaniami najbardziej energooszczędnej formy komunikacji radiowej.
Paweł Kowalczyk, EP












