 Zaloguj
Zaloguj



Oscylatory GPSDO (GPS Disciplined Oscillator) to urządzenia elektroniczne używane do generowania stabilnego sygnału częstotliwości odniesienia, który jest zsynchronizowany z sygnałem systemu nawigacji satelitarnej takim, jak GPS. Dzięki tej synchronizacji możliwe jest osiągnięcie bardzo wysokiej precyzji częstotliwości takiego zegara. Jest to istotne w aplikacjach metrologicznych czy synchronizacji czasu w wielu punktach na świecie.
Coraz większa liczba laboratoriów metrologicznych zaczyna stosować GPSDO, jako swoje główne standardy częstotliwości. GPSDO ma przewagę nad standardami atomowymi, kosztując znacznie mniej, oraz pełnią rolę „samokalibrującego” źródła czasu, które nie powinno wymagać regulacji ani okresowej kalibracji. Te cechy sprawiają, że są one atrakcyjnym wyborem dla wielu laboratoriów, ale również warsztatów elektronicznych czy hobbystycznych, jeśli potrzebne są tam tak dokładne wzorce. Niemniej jednak, źródła te mają też swoje wady w niektórych zastosowaniach.
Zaprezentowany artykuł ma pełnić rolę częściowego wprowadzenia w świat precyzyjnych i dokładnych źródeł odniesienia czasu, a równocześnie ma opisać szczegółowo jedno z nich – oscylatory „dyscyplinowane” za pomocą sygnału GPS. Chodzi tutaj o zegary, które są kontrolowane lub sterowane przez sygnały pochodzące z systemu nawigacji satelitarnej po to, aby utrzymać wysoką dokładność częstotliwości. W artykule zostanie omówione, jak działają GPSDO, jak można uzyskać identyfikowalność (traceability) takiej kalibracji oraz zależność dokładności i precyzji tego pomiaru w zależności od modelu zegara oraz parametrów zewnętrznych.
GPS, jako źródło czasu
GPS jest dobrze znanym systemem i wszechstronnym narzędziem do pozycjonowania i nawigacji. Jest również głównym systemem używanym do rozprowadzania na całym świecie czasu i częstotliwości o wysokiej dokładności. Satelity GPS są kontrolowane i obsługiwane przez Departament Obrony Stanów Zjednoczonych. Konstelacja GPS zawsze obejmuje, co najmniej 24 satelity. Okrążają one Ziemię na wysokości 20 200 km w sześciu stałych płaszczyznach nachylonych pod kątem 55° do równika. Okres orbitalny wynosi 11 godzin i 58 minut (połowa długości doby gwiazdowej), co oznacza, że każdy satelita przechodzi nad danym miejscem na Ziemi o cztery minuty wcześniej niż poprzedniego dnia. Poprzez przetwarzanie sygnałów odbieranych z satelitów, nawet niedrogi ręczny odbiornik GPS może określić swoją pozycję z niepewnością rzędu zaledwie kilku metrów.
Satelity GPS mają na pokładzie zegary atomowe – typowo cztery sztuki – dwa zegary cezowe i dwa zegary rubidowe; satelity konstelacji Galileo mają z kolei dwa zegary rubidowe i dwa bazujące na maserze wodorowym. Zegary te zapewniają krótkoczasowo bardzo wysoką stabilność, jednak muszą być okresowo synchronizowane z naziemnymi precyzyjnymi zegarami odniesienia. W przypadku GPS odpowiedzialne są za to naziemne stacje kontrolne Departamentu Obrony Stanów Zjednoczonych, które gwarantują, by czas satelitów zgadzał się z czasem UTC (USNO) – skalą czasu Universal Coordinated Time (UTC) utrzymywaną przez Obserwatorium Morskie Stanów Zjednoczonych (USNO). UTC (USNO) oraz czas UTC (NIST) Narodowego Instytutu Standaryzacji i Technologii (NIST) są utrzymywane w bliskiej zgodności i rzadko różnią się od siebie o więcej niż 20 ns.
Średnie przesunięcie częstotliwości między UTC (USNO) a UTC (NIST) zazwyczaj wynosi kilka części na 1015 lub mniej w ciągu miesiąca. NIST raportuje to przesunięcie, co tydzień na swojej stronie (link znajduje się na końcu artykułu w bibliografii).
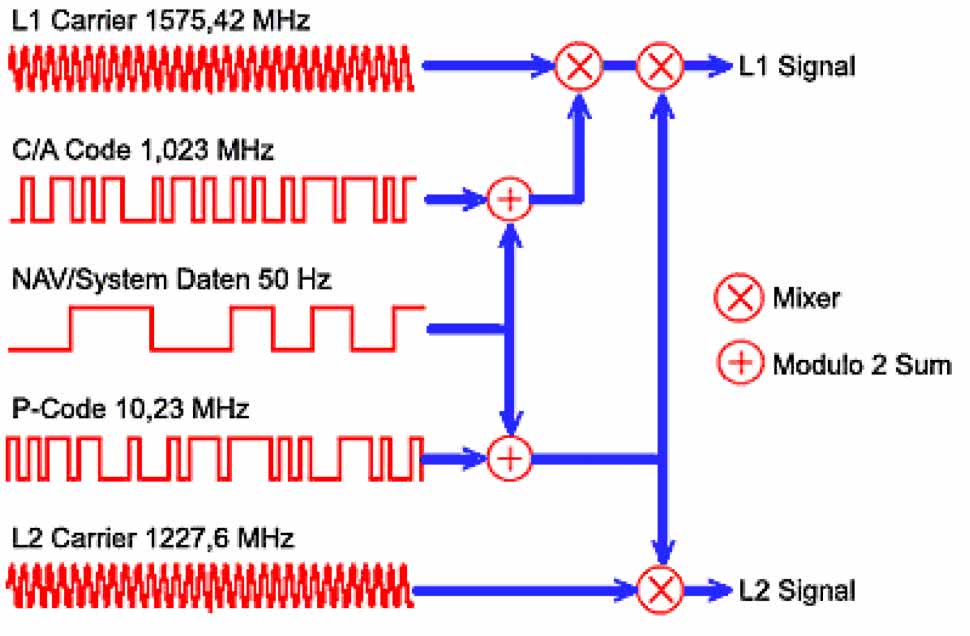
Obecnie satelity GPS nadają na dwóch częstotliwościach nośnych: L1 o częstotliwości 1,57542 GHz i L2 o częstotliwości 1,2276 GHz. Przyszłe satelity GPS mogą nadawać również inne, dodatkowe częstotliwości nośne. Inne konstelacje satelitów nawigacyjnych nadawać mogą na tych samych bądź innych, np. w przypadku Galileo nadaje on w dwóch pasmach podstawowych E1 i E6, które odpowiadają pasmom L1 i L2 systemu GPS; dodatkowo Galileo nadaje sygnał E5, na który składają się pasma E5 (1,191795 GHz), E5a (1,17645 GHz) oraz E5b (1,20714 GHz).
Każdy satelita nadaje rozproszony sygnał, zwany kodem pseudolosowym (PRN), na częstotliwościach L1 i L2, i każdy satelita jest identyfikowany przez kod PRN, który nadaje. Istnieją dwa rodzaje kodów PRN. Pierwszy rodzaj to kod zgrubny (C/A) o prędkości 1023 chipów na milisekundę (1,023 megabitów/s). Drugi rodzaj to kod precyzyjny (P) o prędkości 10230 chipów na milisekundę (10,230 megabitów/s). Kod C/A jest nadawany na nośnej L1, a kod P jest nadawany na obu częstotliwościach L1 i L2. Na obu nośnych nadawana jest również wiadomość z danymi o prędkości 50 bitów/s. Struktura sygnału GPS pokazana jest na rysunku 1.
Zasada działania
Podstawową funkcją modułu GPSDO jest odbieranie sygnałów z satelitów GPS i używanie informacji w nich zawartych do kontroli częstotliwości lokalnego oscylatora – najczęściej rezonatora kwarcowego. Sygnały satelitarne mogą być traktowane, jako odniesienie z wielu powodów. Po pierwsze pochodzą one od zegarów atomowych zainstalowanych na pokładzie satelitów, które muszą być bardzo dokładne, aby system nawigacji satelitarnej spełniał swoje zadanie, jako system pozycjonowania. Aby to zilustrować, przeliczmy, jak dokładność pozycjonowania wynika z dokładności pomiaru czasu w systemie.
Satelity GPS synchronizują swoje zegary pokładowe ze źródłami czasu pochodzącymi z kontrolnych stacji naziemnych raz podczas każdego okrążenia (czyli raz na około 12 godzin). Maksymalna dopuszczalna niepewność zegarów pokładowych przełożona w niepewność pozycjonowania systemu nie może przekroczyć jednego metra. Ponieważ światło porusza się z prędkością około 3×108 m/s, wymaganie niepewności poniżej 1 m jest równoznaczne z niepewnością czasu poniżej 3,3 ns. Oznacza to, że aby system GPS spełniał swoje specyfikacje, zegary satelitów muszą być wystarczająco stabilne, aby utrzymać dokładność czasu z błędem mniejszym niż 3,3 ns w okresie między korektami, co przekłada się na specyfikację stabilności częstotliwościowej rzędu 6×10–14.
Po drugie, jak wspomniano – zegary atomowe znajdujące się na pokładzie satelitów GPS są okresowo (co ok. 12 godz.) synchronizowane z zegarami USNO, które z kolei są synchronizowane z czasem odniesienia NIST. Zapewnia nam to tzw. identyfikowalność naszego standardu, którego precyzja ma odniesienie do zegarów NIST.
Celem układu GPSDO jest przeniesienie inherentnej dokładności i stabilności sygnałów satelitarnych na sygnały generowane przez lokalny oscylator. Problem przekazywania czasu i częstotliwości od zdalnego zegara do oscylatora lokalnego na dużą odległość jest analizowany przez inżynierów od dziesięcioleci.
Opracowanych zostało wiele sposobów rozwiązania tego problemu. Wiele z nich jest opatentowanych, a producenci komercyjnych urządzeń GPSDO rzadko ujawniają dokładnie, w jaki sposób działają ich produkty. Niemniej jednak istnieje kilka podstawowych koncepcji, które mają zastosowanie do większości projektów. W dużym uproszczeniu mówiąc, oscylator lokalny musi być kontrolowany za pomocą jednej lub więcej pętli regulacji – sprzężenia zwrotnego, z różnymi stałymi czasowymi.
Pierwszym kluczowym elementem systemu jest odbiornik GPS. Większość producentów GPSDO korzysta z komercyjnych odbiorników GPS, ponieważ koszt opracowania takiego odbiornika jest zazwyczaj zbyt wysoki i byłoby to nieopłacalne. Oczywiście, są tutaj używane specjalne odbiorniki GPS zaprojektowane do zastosowań w zakresie synchronizacji czasu i kalibracji częstotliwości (czasami nazywane „silnikami czasu GPS”); korzystają one z wieloletnich badań i rozwoju, jednak mimo to są dosyć niedrogie – często kosztują poniżej 100 dolarów przy zakupie w większych ilościach.
Urządzenia te mogą śledzić typowo od 8 do 12 satelitów i generować sygnał jednego impulsu na sekundę (tzw. 1 PPS), który jest zsynchronizowany z sekundami UTC (USNO). Niemal wszystkie tego rodzaju moduły używają kodu C/A na nośnej L1 jako wejściowego sygnału referencyjnego do uzyskania sygnału 1 PPS.
Drugim istotnym elementem układu jest oscylator lokalny. W znakomitej większości przypadków jest to zegar bazujący na oscylatorze kwarcowym. Tego rodzaju zegary są znacznie tańsze niż np. zegary atomowe – rubidowe, a do większości zastosowań laboratoryjnych sprawdza się dostatecznie dobrze.
Zwykły oscylator kwarcowy charakteryzuje się stabilnością częstotliwości na poziomie 2×10–5. Dodatkowo, zegar lokalny musi mieć pewien rodzaj sterowania, który umożliwi wprowadzanie korekt do jego częstotliwości, ustalanych za pomocą sygnału GPS.
W tym celu najpraktyczniej jest zastosować TCXO, czyli oscylator kwarcowy z kompensacją temperatury, czasami nazywany oscylatorem piecowym. Jest to oscylator kwarcowy, który umieszczony jest w tzw. piecu, czyli izolowanej komorze ze stabilizowaną wewnętrznie temperaturą (w komorze znajduje się sensor temperatury oraz grzałka, a stabilizacją temperatury zajmuje się zewnętrzny układ analogowy lub mikrokontroler). W przypadku TCXO stosowanych w tego rodzaju układach, możliwe jest zadawanie temperatury, w jakiej ma się znajdować oscylator. Typowe TCXO, bez dyscyplinowania ich z pomocą GPS, charakteryzują się stabilnością na poziomie 5×10–8. Dla porównania, typowa stabilność komercyjnego zegara rubidowego wynosi 10–10. Jak widać poziom ten jest znacznie poniżej tego, co uzyskuje system GPS.
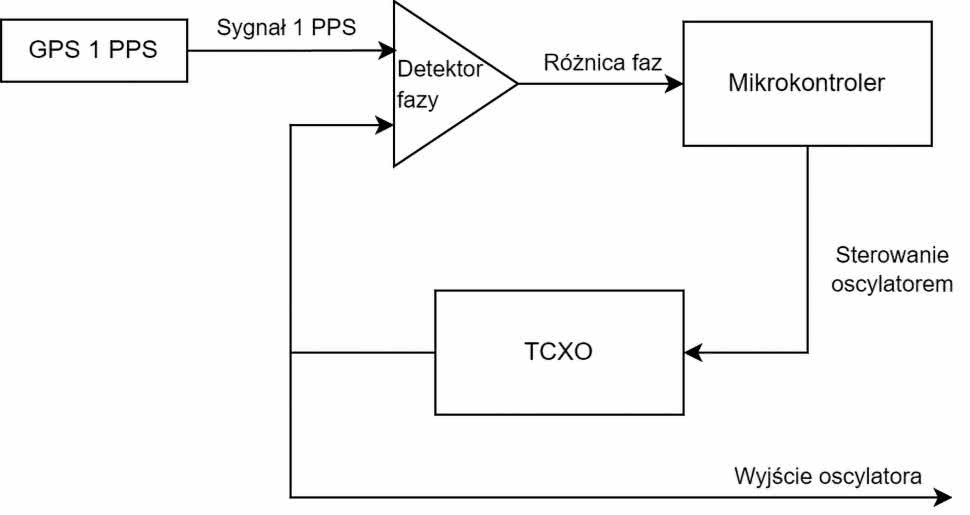
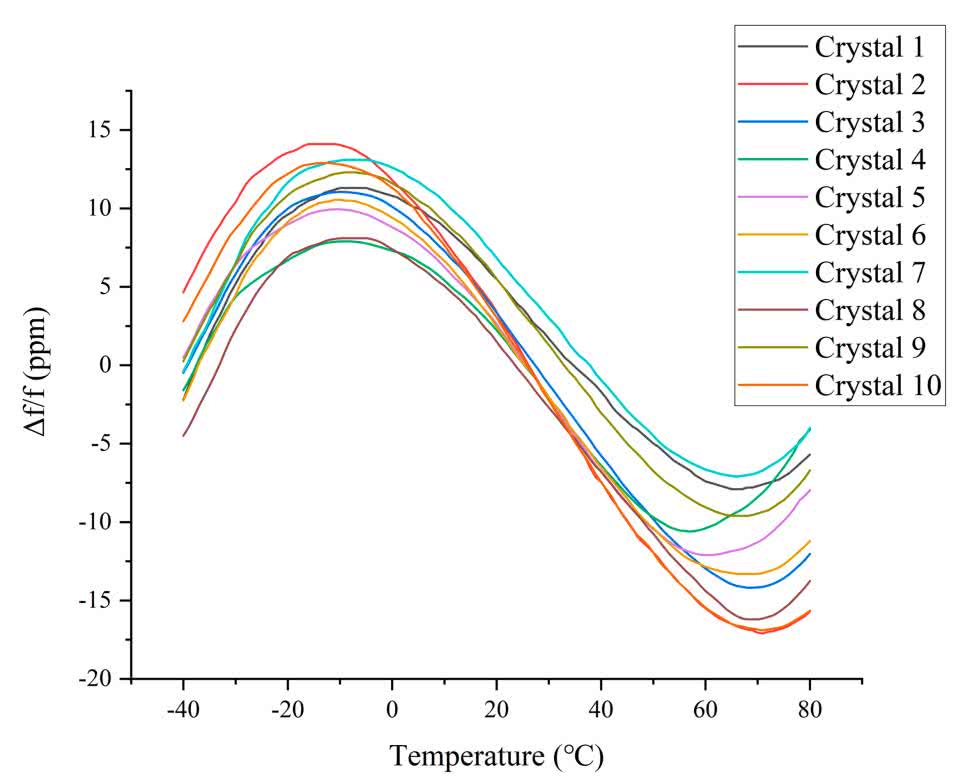
Najprostszą wersję GPSDO, której schemat blokowy pokazano na rysunku 2, można zbudować, stosując detektor różnicy faz do pomiaru różnicy między sygnałem 1 PPS z odbiornika GPS a sygnałem z zegara lokalnego. Następnie np. mikrokontroler odczytuje wyjście z detektora fazy, monitoruje różnicę faz sygnału odniesienia i lokalnego. Zadaniem układu jest utrzymanie zbliżonej do zera różnicy fazy. Kiedy się ona zmienia, np. na skutek dryftu czasowego oscylatora, oprogramowanie zmienia temperaturę TCXO, aby odstroić jego częstotliwość oscylacji. Nie jest to trywialne, ponieważ zależność zmiany częstotliwości oscylacji oscylatora kwarcowego nie jest liniowa w funkcji temperatury (rysunek 3). Mikrokontroler musi uwzględniać tę nieliniowość przy sterowaniu temperaturą pieca.
Producenci GPSDO stosują różne dodatkowe mechanizmy zwiększania precyzji tych systemów. Opracowano na przykład algorytmy adaptacyjne, które pozwalają dodatkowo kompensować starzenie się oscylatora kwarcowego i zmiany temperatury zewnętrznej dla wielu rodzajów oscylatorów lokalnych, co pozwala na skuteczną pracę z tanimi zegarami kwarcowymi. Niektóre algorytmy nawet „uczą się” charakterystyki oscylatora – nie jest ona taka sama dla każdego elementu, podobny jest tylko w zasadzie kształt. Pozwala to na łatwiejsze sterowanie zmianami częstotliwości oscylatora lokalnego, pozwalając na lepsze sterowanie wyjściem GPSDO, w szczególności w sytuacjach, gdy sygnał wejściowy GPS zostanie tymczasowo utracony. To zapewnia GPSDO zdolność do utrzymania dokładnej częstotliwości przez pewien czas np. w przypadku odłączenia anteny lub utraty widoczności satelitów.
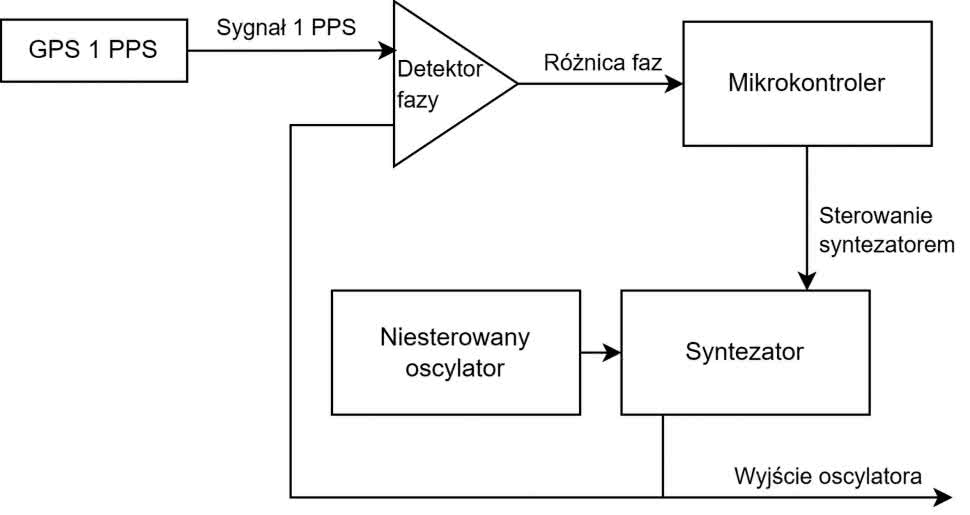
Inny rodzaj systemu GPSDO pokazano na rysunku 4. Układ ten nie koryguje częstotliwości oscylatora lokalnego. Zamiast tego, wyjście swobodnie działającego oscylatora lokalnego jest wysyłane do syntezatora częstotliwości. Korekty częstotliwości są następnie stosowane do wyjścia syntezatora. Współczesne bezpośrednie syntezatory cyfrowe (DDS) mają bardzo wysoką rozdzielczość i pozwalają na dokonywanie bardzo małych korekt częstotliwości. Na przykład DDS o rozdzielczości 48-bitów może zapewnić rozdzielczość częstotliwości poniżej mikroherca przy 10 MHz (taka rozdzielczość pozwala na korekty z dokładnością na poziomie ok. 3,5×10–8 Hz). Ponadto użycie lokalnego oscylatora bez sterowania często przynosi lepsze wyniki niż sterowanie nim, gdyż nieoczekiwane zmiany sygnału sterującego mogą prowadzić do niepożądanych zmian jego częstotliwości wyjściowej.
Praktyczne implementacje
GPSDO to zaawansowane urządzenia, których opracowanie wymagało ogromnego wysiłku inżynieryjnego. Niemniej jednak ich instalacja i użytkowanie jest stosunkowo proste dla użytkownika końcowego. Najtrudniejszą częścią instalacji jest zamocowanie anteny systemu GPS na dachu (na fotografii 1 pokazano przykładową antenę na dachu autora) w miejscu z wolnym widokiem na niebo. Dodatkowo, antenę należy umieścić stosunkowo blisko naszego warsztatu, aby zminimalizować straty sygnału wzdłuż kabla łączącego antenę GPS z odbiornikiem w zegarze. Po zainstalowaniu GPSDO system zazwyczaj rozpoczyna badanie pozycji anteny od razu po włączeniu. Badanie to jest procesem jednorazowym, który zazwyczaj trwa kilka godzin od włączenia urządzenia. Po zakończeniu badania pozycji anteny i synchronizacji z satelitami GPSDO, urządzenie jest gotowe do użycia, jako standard częstotliwości i czasu.

Większość modułów GPSDO generuje na wyjściu sygnały sinusoidalne o częstotliwości 10 MHz, jako sygnał odniesienia częstotliwości, a także ma wyjście sygnału 1 PPS, jako odniesienie interwałów czasowych oraz do synchronizacji czasu z UTC.
Fotografia 2 pokazuje zdjęcie tylnego panelu przykładowego urządzenia GPSDO. Ma ono dodatkowe dwa wyjścia cyfrowe z zegarem 10 MHz w standardzie High Speed CMOS (HCMOS), które jest przeznaczone do taktowania układów cyfrowych. Oprócz tych wyjść na tylnym panelu znajduje się miejsce do podłączenia zdalnej, aktywnej anteny GPS, port RS232, zapewniający możliwość konfiguracji czy bardziej zaawansowanej kontroli modułu oraz, oczywiście, port zasilania.

W przypadku tego konkretnego modelu znajduje się w nim prosty wbudowany wzmacniacz dystrybucyjny dla sygnałów HCMOS. Jednak, jeśli w naszej instalacji w laboratorium potrzebne są więcej niż 2 cyfrowe sygnały zegarowe odniesienia, to konieczne jest dodanie do systemu zewnętrznego wzmacniacza dystrybucyjnego. Jest to prosty, aktywny rozdzielacz sygnału, który charakteryzuje się niskim szumem fazowym, co zapewnia zachowanie wysokiej dokładności GPSDO.
Podsumowanie
Powyższy artykuł poświęcony został opisowi zasady działania i zastosowaniom układów GPSDO. Są one niezwykle istotne dla inżynierów elektroników, którzy zajmują się testowaniem i uruchamianiem urządzeń elektronicznych. GPSDO to zaawansowane urządzenia, które korzystają z sygnałów z systemu GPS do utrzymania bardzo stabilnej i dokładnej częstotliwości oscylatora lokalnego. Dzięki zastosowaniu relatywnie niedrogich oscylatorów kwarcowych sterowanych termicznie (TCXO) lub scalonych, cyfrowych syntezatorów (DDS) urządzenia GPSDO są relatywnie niedrogie w porównaniu do innych, precyzyjnych źródeł zegara odniesienia.
Precyzyjny pomiar czasu jest kluczowy w laboratoriach elektronicznych, a układy GPSDO dostarczają możliwości, które są niezbędne w wielu aplikacjach. Po pierwsze, GPSDO umożliwiają dokładne i stabilne generowanie częstotliwości, co jest kluczowe w zastosowaniach związanych z wieloma pomiarami elektronicznymi. Możliwość uzyskania stabilnych sygnałów o znanej częstotliwości jest nieoceniona w takich dziedzinach jak metrologia, badania mikrofalowe czy też np. badania materiałów.
Po drugie, układy GPSDO są niezastąpione w systemach synchronizacji czasu. Dzięki nim można utrzymywać dokładną i zsynchronizowaną w czasie pracę wielu urządzeń rozproszonych nawet na dużej odległości, co jest kluczowe w telekomunikacji, sieciach komputerowych czy w niektórych badaniach naukowych (np. z tego rodzaju synchronizacji korzystają akceleratory cząstek elementarnych).
Warto podkreślić, że układy GPSDO są jednymi z najtańszych narzędzi w laboratoriach elektronicznych, które pozwalają na precyzyjny pomiaru czasu czy częstotliwości. Dają one możliwość uzyskania wyników pomiarów na najwyższym poziomie dokładności i precyzji, co jest kluczowe w wielu dziedzinach inżynierii, przy tym kosztują ułamek ceny np. zegarów atomowych.
Nikodem Czechowski, EP
Bibliografia:
- D. Shah „GPS disciplined oscillator” Biley Technologies whitepaper, 2017.
- H. El-Bakry i N. Mastorakis „Design of anti-GPS for reasons of security” Proceedings of the International Conference on Computational and Information Science 2009.
- M. Lombardi „The Use of GPS Disciplined Oscillators as Primary Frequency Standards for Calibration and Metrology Laboratories” NCSLI Measure: The Journal of Measurement Science 3 (2008).
- http://tf.nist.gov/pubs/bulletin/nistusno.htm
- Z. Wang, J. Wu „A Method to Increase the Frequency Stability of a TCXO by Compensating Thermal Hysteresis” Sensors 20 (2020)












