 Zaloguj
Zaloguj




Przyczyną niedokładnej pracy zegara, o której mowa we wstępie, są parametry oscylatorów zegarkowych dołączanych do układu scalonego. Podstawowy parametr niepewności częstotliwości oscylacji jest wyrażany w jednostkach „ppm”. Średnio dla większości oscylatorów ten parametr jest równy ±20 ppm. Co to dokładnie oznacza? Jeżelibyśmy chcieli wyrazić ±20 ppm w procentach, to otrzymamy ±0,002%. Można powiedzieć, że to bardzo mało, ale jeśli pomnożymy tę wartość przez liczbę sekund w miesiącu, to w skrajnym wypadku otrzymamy 51,8 s. Oczywiście, jest to wartość skrajna, ponieważ raczej nigdy nie uzyskamy odchyłki maksymalnej – tylko w „jedną stronę”, chociaż może tak się zdarzyć. Nie uwzględniamy tu jeszcze zmian temperatury, które znacząco pogłębiają błąd, ponieważ każdy oscylator jest kalibrowany w określonej temperaturze – dla większości jest 25°C.
Dryft częstotliwości również jest podawany w zależności od temperatury otoczenia. Dla większości typowych oscylatorów wynosi on 0,035 ppm/°C². Jeżeli zegar jest użytkowany w domu lub w pomieszczeniu o stałej temperaturze, to w zasadzie możemy nie uwzględniać dryftu, ale przecież nawet w mieszkaniu temperatura może się zmieniać o kilka stopni w ciągu doby, a dryft ma znaczenie. Jeżeli generator pracuje w zmiennych warunkach, to już nie jest tak wesoło i odchyłka o 10°C od temperatury, dla której był skalibrowany ocylator, spowoduje nam błąd rzędu 9 sekund miesięcznie. Jak temu zaradzić?
Można synchronizować wskazania zegara z wzorcem czasu, pobierając czas z serwera NTP lub korzystając z sygnału radiowego DCF. Wiąże się to jednak z dodatkowymi kosztami, skomplikowaniem programu mikrokontrolera oraz wzrostem złożoności płytki drukowanej. Można też wydać nieco więcej pieniędzy na układ scalony zegara RTC i zastosować DS3231 firmy Maxim Integrated. Co takiego ma ten układ, czego nie mają inne?
Pierwszą stronę dokumentacji układu DS3231 pokazano na rysunku 1. Układ obsługuje lata przestępne do 2100 roku, więc nie trzeba tego uwzględniać w programie obsługi zegara. Jednak najważniejszy parametr to pozycja mówiąca o odchyłce częstotliwości w zakresie temperatury od 0 do +40°C. Nie dosyć, że układ nie wymaga zewnętrznego oscylatora, to jeszcze ten wbudowany w jego strukturę jest kompensowany temperaturowo i w podanym zakresie odchyłka zawsze wyniesie ±2 ppm. Dodatkowo, mamy do dyspozycji rejestr o nazwie „Register for Aging Trim”, za pomocą którego można dodawać lub odejmować pojemność w obwodzie generatora kwarcowego, uzyskując taki sam efekt, jak przy zastosowaniu trymera. Na uwagę zasługuje również to, że w zakresie temperatury od -40 do +85°C niepewność oscylatora wynosi jedynie ±3,5 ppm.
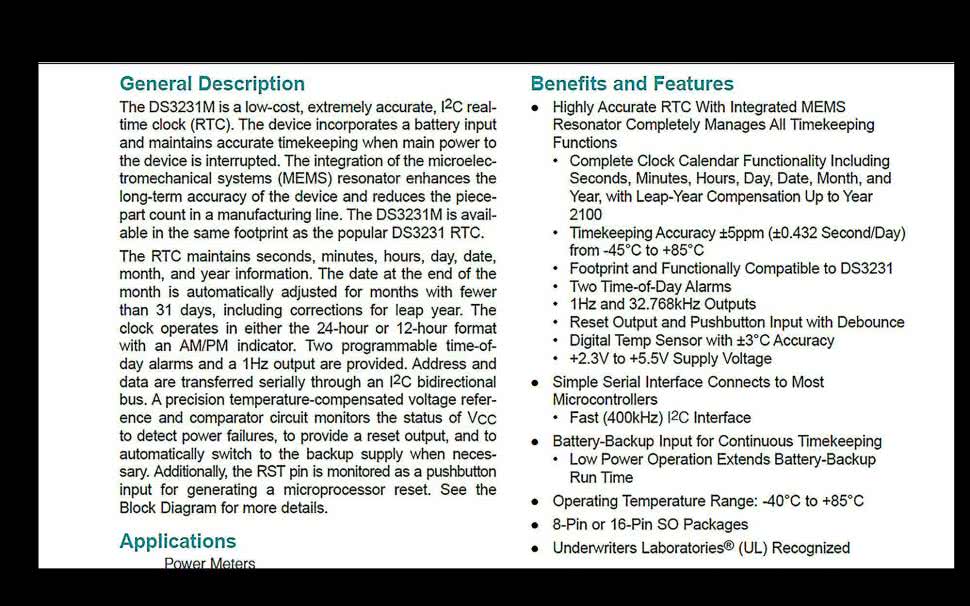
Układ ma wbudowany termometr, ale raczej mało dokładny. Może przydać się w roli sensora temperatury panującej w pokoju, ale raczej nie nadaje się do dokładnych pomiarów. Interfejs I²C pracuje z maksymalną częstotliwością zegarową wynoszącą 400 kHz. Układ ma wejście dla baterii podtrzymującej zasilanie zegara w razie zaniku napięcia głównego. Może przy tym pracować w dużym zakresie napięcia zasilającego - od 2,3 do 5,5 V, przy czym nie wymaga konwersji napięcia na szynie I²C. Pobór prądu w stanie aktywnym to 200 mA przy zasilaniu 3,3 V. Pobór prądu z baterii wynosi około 70 mA. Układ jest produkowany w obudowie SO16. Dostępne są również warianty w obudowie SO8 noszące oznaczenie DS3231MZ+.
Podstawowy schemat aplikacyjny układu pokazano na rysunku 2. Jest nieskomplikowany i myślę, że nie wymaga omawiania. Dlatego w artykule skupię się na opisie biblioteki funkcji służącej do obsługi tego ciekawego układu - jest ona dostępna w materiałach dodatkowych do tego artykułu, do pobrania z serwera FTP.
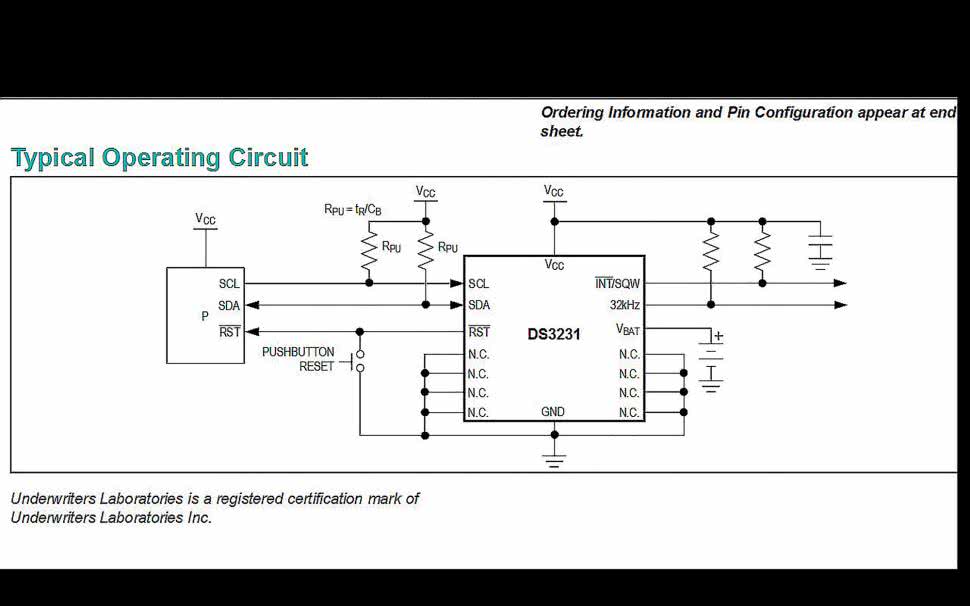
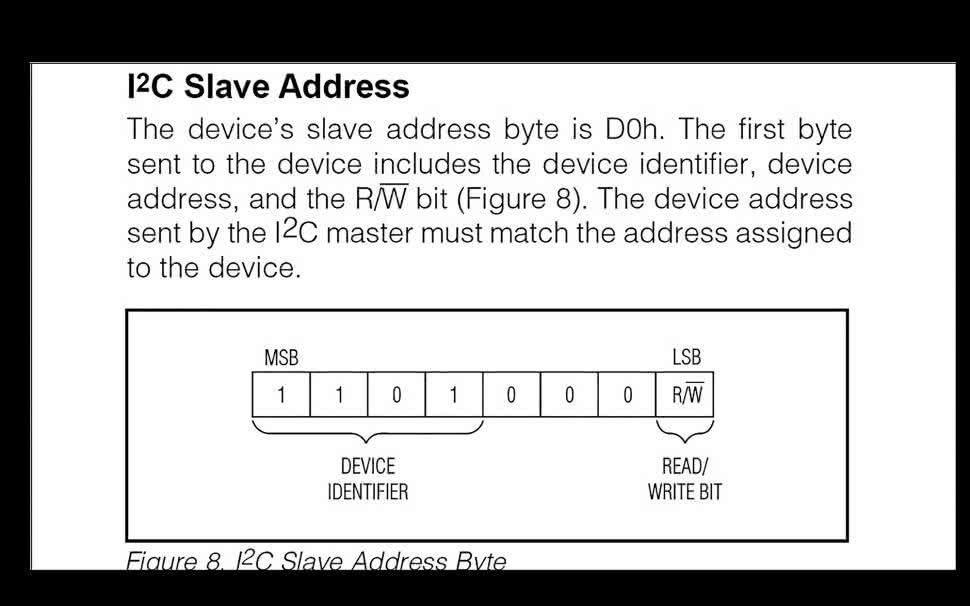
Adres układu na magistrali I2C jest równy 0xD0. Pierwsze, co musimy zrobić, to zastanowić się, czy będziemy w programie wykorzystywali alarmy dostępne w układzie. Jeżeli tak, to wyprowadzenie INT/SQW nie będzie mogło dostarczać przebiegu 1 Hz.
Jeżeli zapoznamy się z zawartością rejestru o nazwie Register Control, to zauważymy, że po włączeniu zasilania lub restarcie domyślnie jest ustawiany bit INTCN. Oznacza to, że przerwanie od alarmu jest włączone. Aby na wyjściu INT/SQW występował przebieg 1 Hz musimy ten bit wyzerować. Ponieważ pozostałe bity też są „0”, możemy wpisać do całego rejestru „0”, jak na listingu 1. Jeśli to zrobimy, to na wyjściu INT/SQW będzie dostępny przebieg o częstotliwości 1 Hz, co wykorzystamy w programie jako niezależny timer i w bardzo wygodny sposób będziemy mogli w przerwaniu co 1 sekundę odczytywać aktualny czas.
void DS3231_init( void )
{
uint8_t control = 0;
TWI_write_buf( DS3231_ADDR, 0x0e, 1, &control );
}
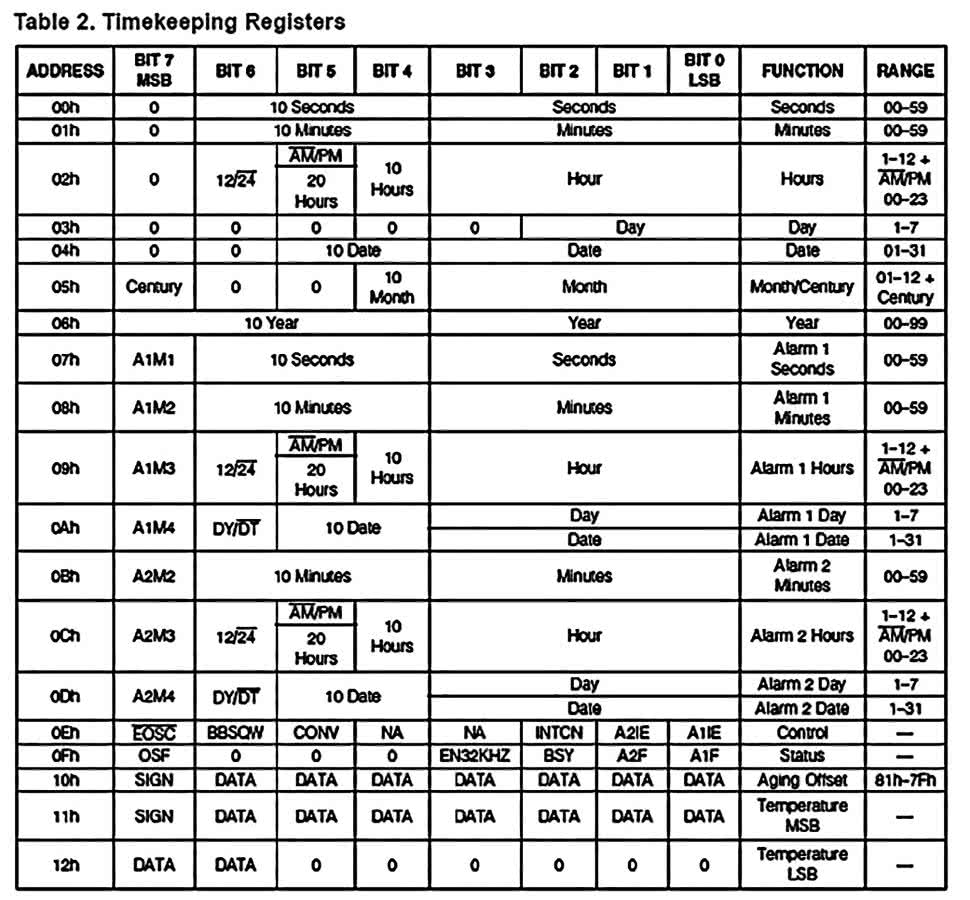
Wykaz rejestrów układu zaczerpnięty z jego dokumentacji pokazano na rysunku 4. Kolejne rejestry dostępne pod adresami od 0x00 do 0x06 zawierają sekundy, minuty, godziny (do wyboru - tryb 24- lub 12-godzinny), kolejny dzień tygodnia, dzień miesiąca, miesiąc i rok, przy czym rok to tylko dwie ostatnie cyfry daty, więc jeśli chcemy podać całą liczbę roku, to początek (aktualnie liczbę „20”) musimy dodać w programie. Dalej, mamy rejestry do ustawiania dwóch alarmów, rejestry Control, Status oraz Aging offset do ewentualnej korekty częstotliwości oscylatora. Na samym końcu rejestry, z których możemy odczytać temperaturę struktury układu.
Nas interesuje przede wszystkim odczyt czasu i daty. Wartości te musimy zapisać do zmiennych, aby móc później zaprezentować dane dla użytkownika. Myślę, że wygodnie jest utworzyć strukturę, w której będziemy przechowywali wszystkie wartości. Pozwoli ona wygodnie odwoływać się do nich w programie, w zależności od potrzeb. Wspomnianą strukturę pokazano na listingu 2.
typedef union
{
uint8_t bytes[8];
struct
{
uint8_t ss;
uint8_t mm;
uint8_t hh;
uint8_t dayofweek;
uint8_t day;
uint8_t month;
uint8_t year;
uint16_t next_day;
};
} TDATETIME;
Po włączeniu zasilania zegar rozpoczyna odmierzanie czasu od „00:00:00”, więc na jego początku, na przykład w pliku „main.c”, musimy wpisać aktualny czas i datę do rejestrów układu zegara. W strukturze z listingu 2 poszczególne wartości są ułożone w kolejności rejestrów. Oprócz tego, w rozbudowanym zegarze może być przydatna informacja o kolejnym dniu roku. Uwzględnia ona rok przestępny. Z punktu widzenia tego, co napisano wcześniej, przydatna będzie funkcja, odczytująca rejestry czasu i daty i zapisująca te dane do struktury. Zawarto w niej funkcjonalność konwersji liczb binarnych na dziesiętne. Obie funkcje zamieszczono na listingu 3.
uint16_t day_of_year(TDATETIME * dt)
{
uint16_t n,n1,n2,n3;
n1 = floor(275 * dt->month / 9);
n2 = floor((dt->month + 9) / 12);
n3 = (1 + floor((dt->year - 4 * floor(dt->year / 4) + 2) / 3));
n = n1 - (n2 * n3) + dt->day - 30;
dt->next_day = n ;
return dt->next_day;
}
void DS3231_get_datetime( TDATETIME * dt )
{
uint8_t i;
uint8_t buf[7];
I2C_read_buf( DS3231_ADDR, 0x00, 7, buf );
for( i=0; i<7; i++ ) dt->bytes[i] = bcd2dec( buf[i] );
}
char days[7][14] = {„poniedziałek „, „ wtorek „, „ środa „, „ czwartek „, „ piątek „, „ sobota „, „ niedziela „
};
W strukturze z listingu 2 jest pole o nazwie dayofweek, która jest wyrażona wartością od 1 do 7. Jednak zwykle na wyświetlaczu pokazujemy nie liczbę, a nazwę dnia tygodnia. Konwersję najłatwiej przeprowadzić za pomocą tablicy z nazwami dni tygodnia, w której poniedziałek ma numer 1, a niedziela 7. Ponieważ występują tu polskie znaki, trzeba to obsłużyć programowo w zależności od zastosowanego wyświetlacza. Należy zwrócić uwagę, że w tablicy nazwy zaczynają się od pozycji „0”, natomiast z rejestru układu odczytujemy dni od wartości jeden, więc odwołując się w kodzie do tablicy, musimy od wartości „dayofweek” odjąć jeden.
Pozostaje nam jeszcze uwzględnić zmianę czasu na letni lub zimowy. Odpowiednią funkcję pokazano na listingu 4. W funkcji wykorzystano dodatkową zmienną time, pełniącą funkcję flagi. Dla czasu letniego zmienna przybiera wartość „1”, natomiast dla zimowego „0”. Należy to uwzględnić w momencie inicjalizacji zmiennej dla obowiązującego czasu.
void TIME_CORRECTION_EVENT(TDATETIME * dt)
{
if(!time)
{
if((dt->ss==2)&&(dt->mm==0)&&(dt->hh==2))
{
if((dt->month==3)&&(dt->day>24)&&(dt->dayofweek==7))
{
time=1;
DS3231_set_time(3,00,02 );
}
}
}
else
if(time)
{
if((dt->ss==2)&&(dt->mm==0)&&(dt->hh==3))
{
if((dt->month==10)&&(dt->day>24)&&(dt->dayofweek==7))
{
time=0;
DS3231_set_time(2,00,02 );
}
}
}
}
Pozostaje nam już tylko na starcie programu wpisać do rejestrów układu aktualny czas i datę. Do tego celu są przeznaczone funkcje: DS3231_set_time dla godziny oraz DS3231_set_date dla daty. Obie funkcje zamieszczono na listingu 5. Chciałbym zwrócić uwagę, że w bibliotece nie ma funkcji do wyświetlania daty i czasu, ponieważ trudno jest przewidzieć, w jaki sposób będzie prezentowana godzina czy data w aplikacji docelowej.
void DS3231_set_time( uint8_t hh, uint8_t mm, uint8_t ss )
{
uint8_t buf[3];
buf[0]=dec2bcd(ss);
buf[1]=dec2bcd(mm);
buf[2]=dec2bcd(hh);
TWI_write_buf( DS3231_ADDR, 0x00, 3, buf );
}
void DS3231_set_date( uint8_t year, uint8_t month, uint8_t day, uint8_t dayofweek )
{
uint8_t buf[4];
buf[0]=dayofweek;
buf[1]=dec2bcd(day);
buf[2]=dec2bcd(month);
buf[3]=dec2bcd(year);
TWI_write_buf( DS3231_ADDR, 0x03, 4, buf );
}
Przykładową funkcję main pokazano na listingu 6. Na początku dołączamy pliki systemowe, a następnie inicjujemy interfejs I2C, ustawiając częstotliwość SCL na 400 kHz. Przy ustawianiu prędkości magistrali należy uwzględnić parametry innych dołączonych do niej układów i ewentualnie skorygować wartość bitrate. Teraz inicjujemy układ DS3231 oraz przerwanie od wejścia INT0. Możemy wybrać inny rejestr INT lub PCINT - wtedy należy skorygować funkcję oraz wektor przerwania. Wpisujemy do rejestrów układu aktualny czas i datę, przy czym po wpisaniu należy linie te opatrzyć komentarzem i ponownie wgrać program. Unikniemy w ten sposób błędnego odczytu po ponownym uruchomieniu programu, np. w wyniku zaniku napięcia zasilania. Nasz zegarek będzie przecież pracował na podtrzymaniu. Włączamy oczywiście zezwolenie na globalne przerwania.
#include <avr/io.h>
#include <avr/interrupt.h>
#include „I2C_TWI/i2c_twi.h”
#include „ds3231.h”
int main(void)
{
i2cSetBitrate( 400 );
DS3231_init();
INT_init();
//DS3231_set_time(15,10,00 );
//DS3231_set_date(18,12,22,6);
sei();
while(1)
{
DS3231_show_time(&datetime);
DS3231_show_date(&datetime);
TIME_CORRECTION_EVENT(&datetime);
}
}
ISR(INT0_vect)
{
DS3231_get_datetime(&datetime);
}
Pętla główna to funkcje do wyświetlania czasu i daty (które należy wykonać samodzielnie w zależności od użytego wyświetlacza) oraz funkcja korekcji czasu letni/zimowy. Na koniec wektor przerwania, gdzie co sekundę odczytujemy aktualny czas. Życzę przyjemnej pracy z układem i tworzenia fajnych czasomierzy.
W artykule wykorzystano biblioteki do obsługi I2C z książki „Mikrokontrolery AVR język C - podstawy programowania” wydawnictwa Atnel.
Marek Rębecki
marekrebecki@wp.pl












