 Zaloguj
Zaloguj



Do realizacji ultradźwiękowego pomiaru odległości wystarczą generator i odbiornik ultradźwięków podłączone do wzmacniacza operacyjnego oraz mikrokontrolera z przynajmniej czterema dostępnymi wyprowadzeniami I/O mającego przy tym wbudowany komparator analogowy.
Zasada działania
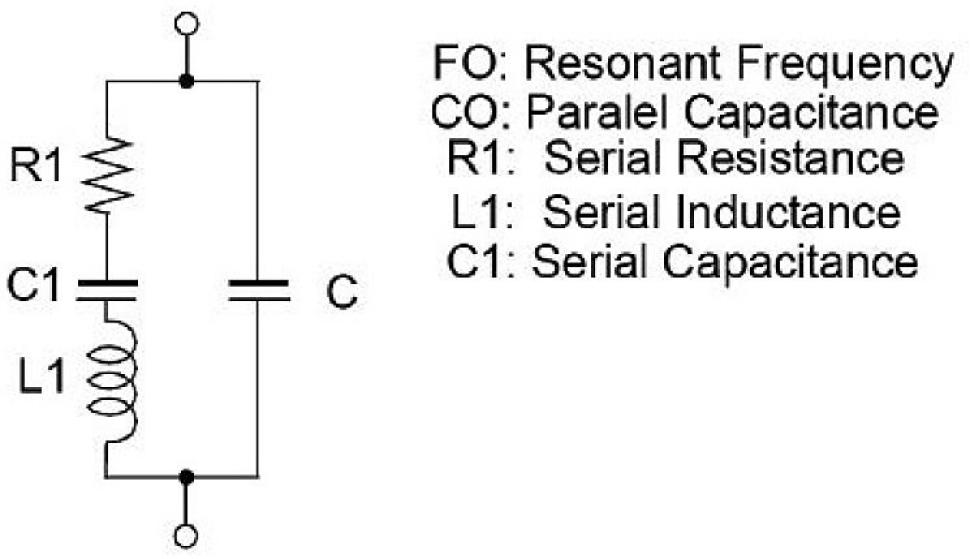
Rysunek 1. Obwód zastępczy piezoelektrycznego elementu ultradźwiękowego
Zasada działania dalmierza ultradźwiękowego jest łatwa do zrozumienia. Do jego zbudowania jest potrzebny generator przebiegu o częstotliwości 40 kHz, który umożliwia emitowanie impulsów lub fal ciągłych. Generator ten sterujemy mikrokontrolerem z użyciem fali prostokątnej, trwającej od jednego do kilku okresów fali ultradźwiękowej.
Tak wytworzony impuls trafia na obiekt o gęstości większej niż gęstość powietrza i częściowo odbija się wracając do urządzenia pomiarowego. Gdy dotrze do odbiornika, staje się możliwe zmierzenie czasu pomiędzy emisją impulsu, a jego odbiorem, co po uwzględnieniu szybkości poruszania się fali dźwiękowej w powietrzu, pozwala na obliczenie odległości od interesującego nas obiektu.
Pomiarów ultradźwiękowych można dokonywać nie tylko w powietrzu, ale też w innych ośrodkach. Im ośrodek gęstszy, tym szybciej propagują fale dźwiękowe. W przypadku powietrza, a więc w najbardziej typowych zastosowaniach, prędkość propagacji zależy w praktyce od temperatury, wilgotności i wysokości, na której dokonywany jest pomiar, a więc od czynników, które wpływają na gęstość ośrodka.
Dla uproszczenia przyjmuje się, że w temperaturze pokojowej, szybkość propagacji fali dźwiękowej jest stała i wynosi 343 m/s. To właśnie tę wartość zaleca się używać w dalmierzach ultradźwiękowych o zasięgu do kilku metrów.
Rodzaj powierzchni, od której odbija się fala nie ma wielkiego znaczenia. Przy częstotliwości 40 kHz niemal wszelkie ciała stałe dobrze odbijają fale, a jedynym problemem może być ich pochylenie. Jeśli jest ono zbyt duże, tylko niewielka część emitowanego sygnału dotrze do odbiornika, co może utrudnić pomiar. Idealne odbicie następuje, gdy fala pada prostopadle do powierzchni, od której ma nastąpić odbicie.
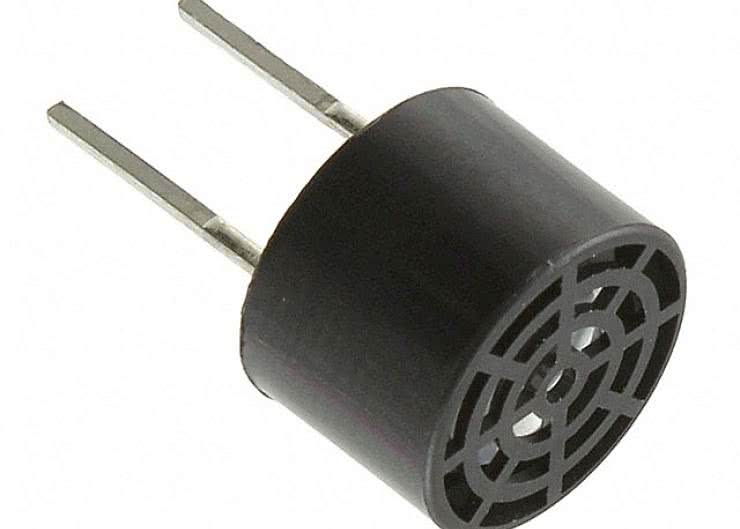
Przetwornik ultradźwiękowy pracuje podobnie do buzzera piezoelektrycznego, tylko, że na wyższej, częstotliwości niesłyszalnej dla człowieka. Kiedy prąd elektryczny przepływa przez element piezoelektryczny, ugina go, a po wstrzymaniu przepływu prądu - piezoelektryk powraca do pierwotnego kształtu.
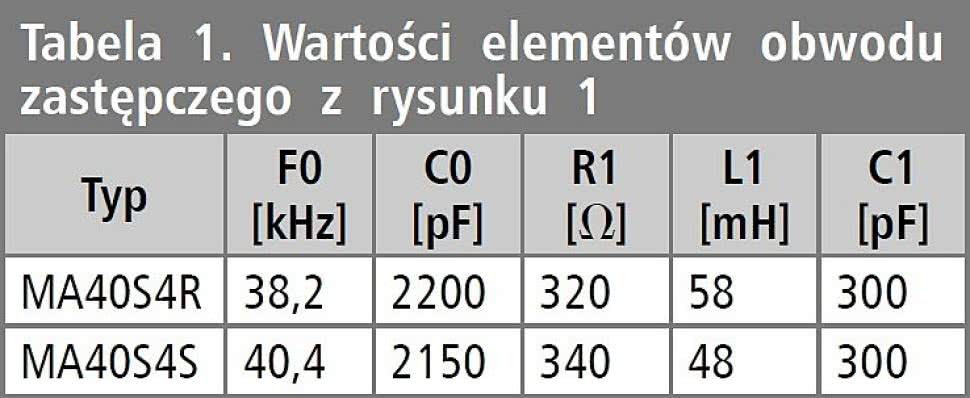
Tabela 1. Wartości elementów obwodu zastępczego z rysunku 1
Podanie sygnału prostokątnego o częstotliwości 40 kHz powoduje wibracje, skutkujące wyemitowaniem fali ultradźwiękowej o tej samej częstotliwości. Odbiornik ultradźwiękowy działa podobnie, ale odwrotnie, generując niewielkie napięcie przemienne na podstawie nadchodzącej fali.
Nadajnik może być zintegrowany z odbiornikiem. Ponadto, w handlu dostępne są modele uszczelnione, których można używać np. w wodzie. Wymagają one silniejszego sygnału do wysterowania, więc na potrzeby tego przykładu skoncentrujemy się na aplikacji ze standardowymi, oddzielnymi piezoelektrycznymi nadajnikami i odbiornikami.
Obwód zastępczy takiego elementu piezoelektrycznego pokazano na rysunku 1. Ma on przede wszystkim charakter obciążenia pojemnościowego, ale ze względu na pewne właściwości indukcyjne ma częstotliwość rezonansową 40 kHz.
Nadajnik jest skonfigurowany tak, aby uzyskać maksymalną skuteczność emisji sygnału ultradźwiękowego, natomiast odbiornik, aby wytwarzać jak najwyższe napięcie o częstotliwości 40 kHz. To sprawia, że ten układ stanowi tłumik dla wszystkich pozostałych częstotliwości i w efekcie pozwala na eliminowanie zakłócających fal. Typowe wartości elementów obwodu zastępczego pokazano w tabeli 1.
Sterowanie elementami piezoelektrycznymi
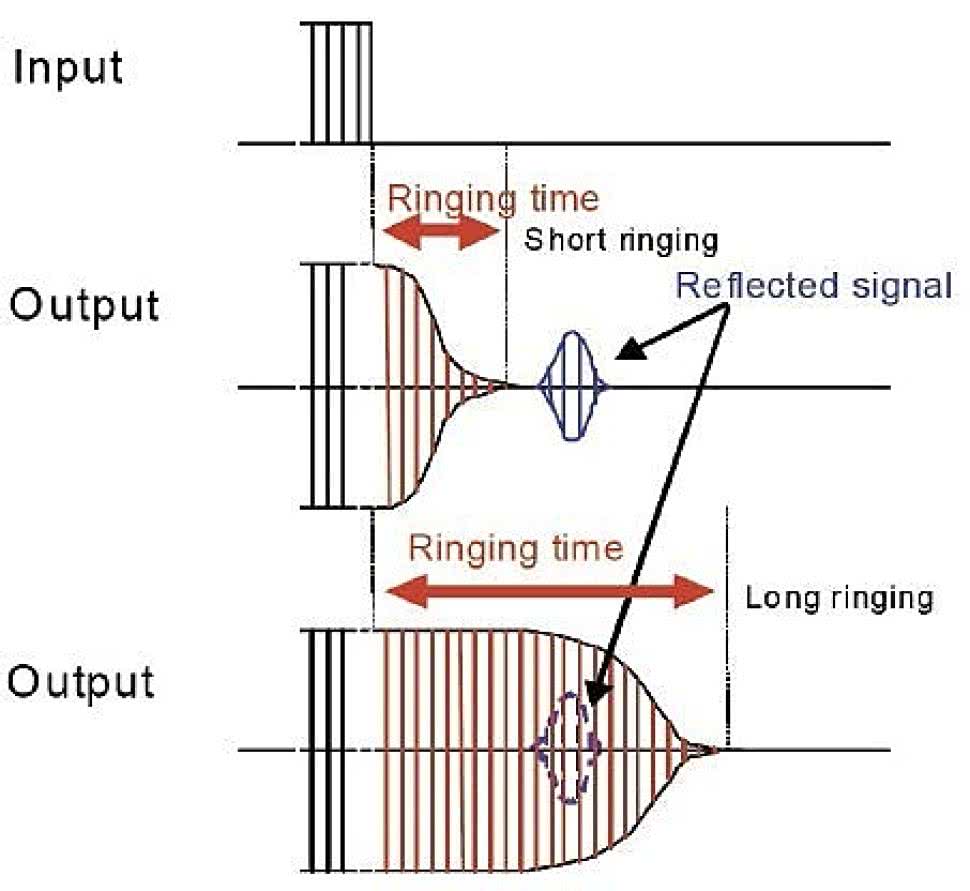
Rysunek 2. Maskowanie sygnału odbitego przez wygaszający się sygnał generowany przez nadajnik
Najkorzystniejszym sposobem zasilania transmitera piezoelektrycznego jest użycie sygnału różnicowego. Pozwala to na wyeliminowanie potrzeby zastosowania dodatkowego, ujemnego napięcia zasilającego.
Niestety, z używaniem generatora piezoelektrycznego związany jest jeden problem. Element ten, nawet po wyłączeniu sygnału sterującego, przez pewien czas wciąż wytwarza fale ultradźwiękowe, co wynika z jego właściwości rezonansowych.
Gdy nadajnik już po wyłączeniu sygnału sterującego wciąż emituje sygnał, powstający sygnał może się sprzęgać przez obwody drukowane lub w postaci ultradźwięków dotrzeć do odbiornika i w efekcie być rozpoznany jako sygnał powracający po odbiciu.
Dlatego jest konieczne wprowadzenie pewnego opóźnienia pomiędzy zakończeniem transmisji, a rozpoczęciem odbierania sygnału. Czas ten decyduje o minimalnej odległości, którą jest w stanie zmierzyć taki przyrząd ultradźwiękowy. Pokazano to na rysunku 2.
Warto też zaznaczyć, że elementy ultradźwiękowe powinny być sterowane sygnałem o częstotliwości jak najbardziej zbliżonej do ich częstotliwości znamionowej. 8-megahercowy oscylator wewnętrzny, wbudowany w mikrokontroler Microchip PIC16F690, można łatwo użyć do generowania sygnału o częstotliwości 40 kHz. Dwa wyprowadzenia mikrokontrolera wystarczą do wysterowania różnicowego, gdzie podstawą czasu będzie przerwanie wywoływane po przekręceniu się licznika Timer0.
Alternatywną metodą byłoby użycie modułu ECCP, dostępnego w wielu mikrokontrolerach PIC. Moduł może zostać zaprogramowany do generowania sygnału PWM o określonej częstotliwości z użyciem dwóch wyprowadzeń: P1A i P1B w trybie półmostka, z jednym wyjściem odwróconym. ECCP używa w tym celu Timera2, którego przeskalowanie pozwala na określenie liczby impulsów wygenerowanych, zanim wyzwolone zostanie przerwanie. Dzięki temu impuls ultradźwiękowy da się wysłać korzystając tylko z jednego przerwania.
Odbiór sygnału
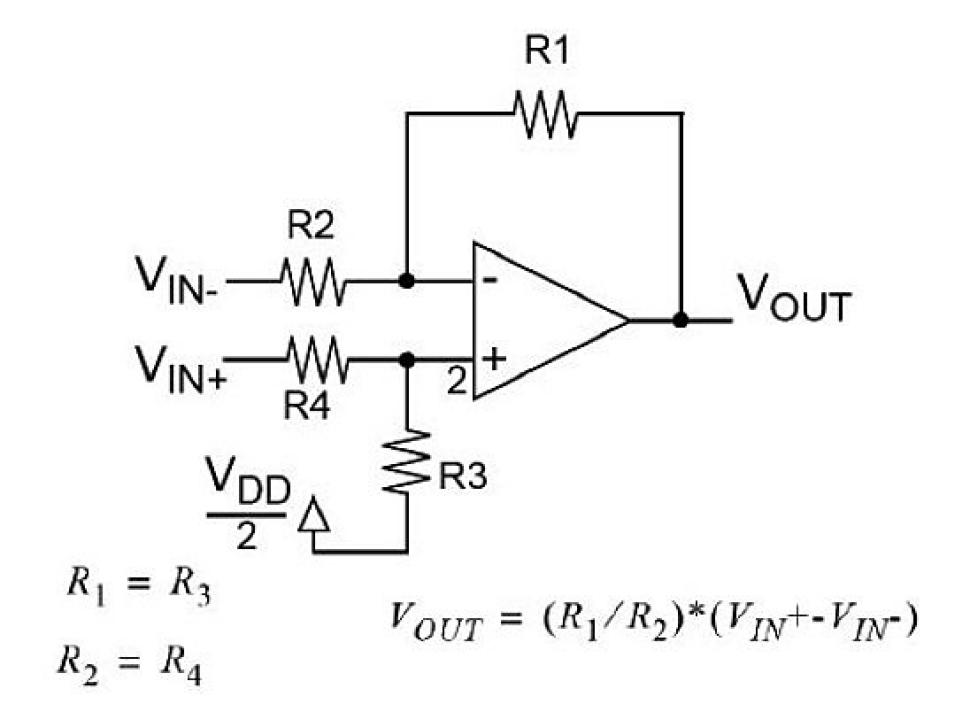
Rysunek 3. Wzmacniacz różnicowy w odbiorniku
Powracający sygnał będzie znacząco stłumiony i dlatego konieczne jest jego wzmocnienie, zanim zostanie podany na wejście komparatora. W tym celu wystarczy użycie pojedynczego wzmacniacza operacyjnego, pracującego w trybie różnicowym (rysunek 3). Wyprowadzenia przetwornika należy dołączyć do wejść wzmacniacza.
Pojawiającą się składową stałą należy wyeliminować, dobierając odpowiednie wartości rezystorów R1...R4. O wpływ fal innych częstotliwości niż nadawana nie trzeba się obawiać, gdyż przetwornik działa jak filtr o dużej dobroci, dostrojony do częstotliwości rezonansowej.
Ważne, aby wzmacniacz operacyjny był tak dobrany, by nie było potrzeba dodawać kolejnych stopni wzmacniania, gdyż w przeciwnym wypadku konieczne byłoby też dodanie filtrów. W omawianym przykładzie zastosowano wzmacniacz operacyjny Microchip MCP6022, który cechuje się płaską korzystną charakterystyką wzmocnienia. Dla częstotliwości 40 kHz uzyskiwane wzmocnienie jest 250...300-krotne.
Następnie, sygnał pochodzący z przetwornika ultradźwiękowego po wzmocnieniu jest przekazywany na wejście komparatora wewnątrz mikrokontrolera, skonfigurowanego tak, aby na wyjściu dawał sygnał o napięciu VDD lub 0 V (rysunek 4).
W tym celu, jako napięcie odniesienia Vth podaje się stały sygnał o wartości niewiele mniejszej niż średnia napięcia wzmocnionego sygnału ultradźwiękowego. Im wartość Vth jest bliższa średniemu napięciu odbieranego sygnału, tym większy zasięg pracy całego urządzenia.
Gdy tylko odebrany zostanie impuls ultradźwiękowy, wartość na wejściu C2IN- spadnie poniżej wartości napięcia C2IN+, powodując przełączenie wyjścia komparatora. Wartość rezystora R2 (rys. 4) powinna być znacznie większa niż R1, ale nie nazbyt duża, by sam szum na wejściu komparatora nie powodował przełączeń wyjścia.
Wyjście C2OUT mikrokontrolera PIC może być użyte na potrzeby diagnostyki tego fragmentu odbiornika. Częstym problemem jest błędnie ustawione napięcie odniesienia Vth. Jeśli jest one zbyt małe, zasięg miernika będzie zbyt krótki. Jeśli zbyt wysokie, szumy będą zakłócać pracę urządzenia.
Pomiar odległości
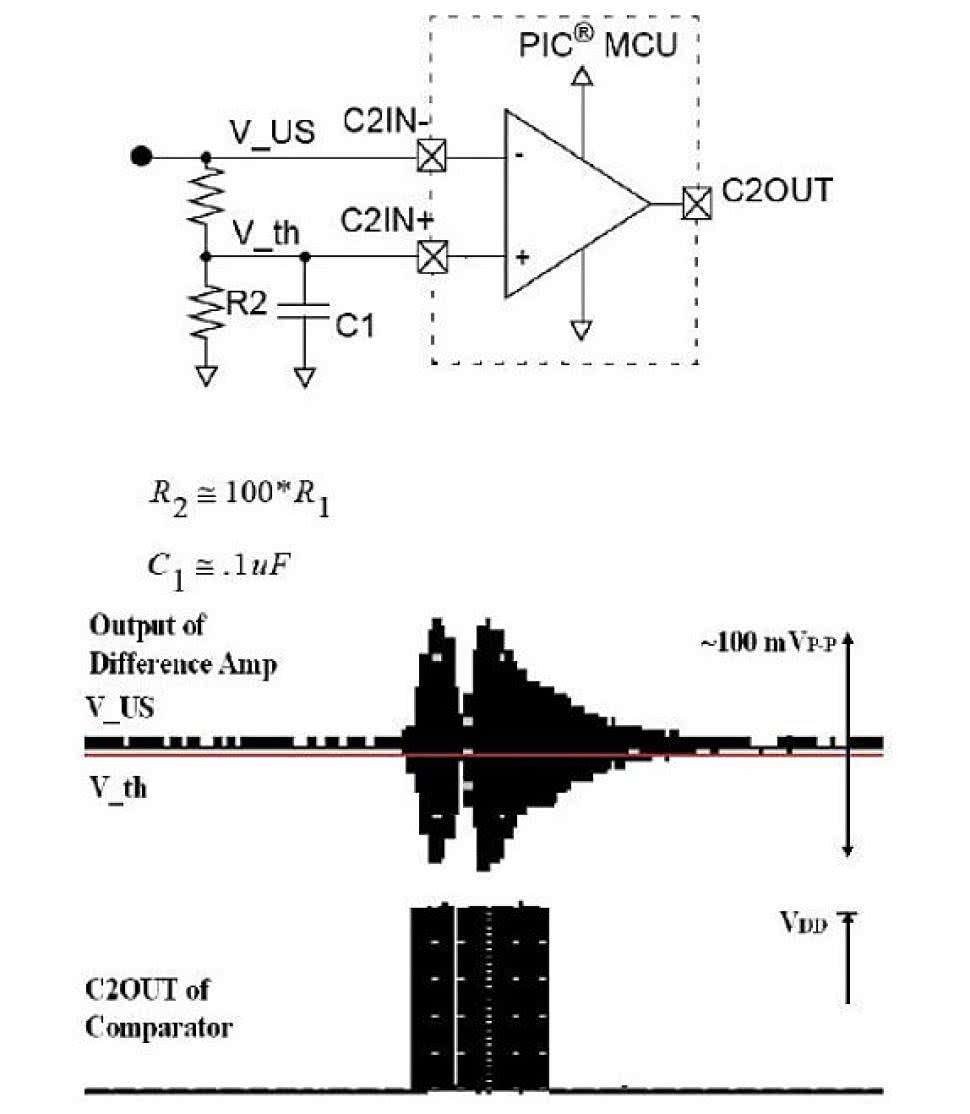
Rysunek 4. Komparator wykrywający nadchodzące impulsy
Funkcja bramkowania timera pierwszego pozwala na blokowanie sygnału zegarowego, a na jej wejście można wewnętrznie przekierować wyjście C2OUT. Zliczanie trwa od chwili emisji sygnału ultradźwiękowego, przez cały czas, gdy C2OUT ma poziom niski.
Nadejście impulsu z odbiornika powoduje przełączenie C2OUT do poziomu wysokiego wstrzymując timer1. Zliczona wartość odnosi się do czasu, który upłynął od emisji sygnału, przez jego odbicie i dotarcie z powrotem do odbiornika.
Czas ten należy uznać za potrzebny fali ultradźwiękowej na przebycie podwojonej, mierzonej odległości. Oznacza to, ze jego podział przez dwa (np. poprzez przesunięcie bitowe) i pomnożenie przez prędkość dźwięku pozwala uzyskać poszukiwany dystans.
Dokładność pomiaru zależy m.in. od częstotliwości emitowanego impulsu. Długość fali 40-kilohercowej wynosi około 8,5 mm. Zwiększenie częstotliwości polepszy rozdzielczość, ale ograniczy zasięg i może utrudnić wykonywanie pomiarów ze względu na zwężenie odbieranej wiązki.
Na precyzję wpływa też dokładność użytego oscylatora, zliczającego upływający czas od emisji sygnału, a także jakość i liczba zastosowanych filtrów. Wszystkie te czynniki sumują się, skutkując tym, że dokładność takiego miernika ultradźwiękowego, pracującego na częstotliwości 40 kHz wynosi około 1 cm i jest praktycznie niezależna od mierzonej odległości. Ważne tylko, by emitowany sygnał był w stanie powrócić do odbiornika.
Zwiększanie zasięgu
Gdyby chcieć zwiększyć użyteczny zakres pracy miernika, konieczne byłoby albo zwiększenie mocy nadajnika, albo czułości odbiornika. W przedstawionym przykładzie do generatora podłączone są wyjścia układu, pozwalające na dostarczenie maksymalnie 20 mA prądu, przy napięciu 5 V. Zastosowanie na wyjściu tranzystorów MOSFET pozwoliłoby podnieść obie te wartości.
Czułość odbiornika zależy przede wszystkim od wzmocnienia sygnału na wejściu. W omawianym przykładzie użyto jedynie jednego wzmacniacza operacyjnego, co pozwoliło znacząco uprościć układ, ale ogranicza czułość miernika. Użycie dodatkowych wzmacniaczy jest możliwe, ale tylko, jeśli zastosowane zostaną odpowiednie układy filtrowania pomiędzy nimi.
W wypadku, gdy przetworniki do nadawania i odbioru sygnałów ultradźwiękowych są oddzielne, należy je umieścić równolegle do siebie, ale jeśli to możliwe, jak najbardziej odseparowując je. Rzecz w tym, by zredukować drgania przenoszone przez płytkę drukowaną. Można to uzyskać również poprzez wycięcie otworów w płytce pomiędzy przetwornikami lub dzięki użyciu gumowych lub silikonowych podkładek, które będą tłumić drgania.
Podsumowanie
Budowa ultradźwiękowego miernika odległości jest nieskomplikowana i wymaga tylko „garści” podzespołów. W omawianym przykładzie użyto mikrokontrolera PIC16F690, wzmacniacza operacyjnego MCP6022 i przetworników MuRata MA40S4R/S.
Wyprowadzenia mikrokontrolera PIC pozwalają dostarczyć wystarczająco dużo prądu, by zasilić przetwornik. Timery 0 i 1 zostały użyte do emitowania fali ultradźwiękowej i zliczania czasu jej propagacji. Układ MCP6022 wzmacnia odbierany sygnał, a wbudowany w PIC16F690 komparator analogowy pozwala na wykrywanie obecności impulsu.
Keith Curtis
Microchip












