 Zaloguj
Zaloguj




Metody lokalizacji w pomieszczeniach z użyciem sygnału radiowego osiągnęły już stabilność i znane są eksperymentalne i komercyjne systemy lokalizacji. Jednak typowo ich opisy nie są udostępnione.
W opisach często mylone jest pojęcie techniki z metodą. Na przykład Bluetooth, Wi-Fi oraz UWB (UltraWideBand) są technikami (technologiami) komunikacji radiowej, natomiast RSSI (Received Signal Strength), ToF (Time od Flight), TOA (Time of Arrival), TDoA (Time Difference of Arrival), AoA (Angle of Arrival ) oraz AoD (Angle of Departure) są metodami określania położenia. Razem z odpowiednim sprzętem, algorytmami pozycjonowania, narzędziami programowymi i usługami są one stosowane do tworzenia końcowego produktu. Uzyskana wydajność i własności użytkowe jak: dokładność, stabilność, skalowalność, wszechstronność, użyteczność, kompatybilność, koszt itd. - są kombinacją wszystkich składowych. Porównanie różnych sposobów lokalizacji w pomieszczeniach z użyciem sygnału radiowego pokazano w tabeli 1.

Technologia UWB stosuje transmisję z bardzo rozproszonym pasmem i bardzo krótkimi impulsami. UWB pozwala na stosowanie różnych metod pozycjonowania. Uzyskiwane rezultaty są dobre (lub bardzo dobre) przy wysokich kosztach i silnych obwarowaniach przepisami. Metoda ToF (Time of Flight) określa odległość pomiędzy nadajnikiem i odbiornikiem. Przy kilku nadajnikach można metodą trilateracji (trilaterate) określić położenie odbiornika. Metoda wymaga specjalnych układów, które umożliwiają bardzo precyzyjną synchronizację czasową [9]. Prowadzi to do dosyć wysokich kosztów. I nie można zastosować standardowych telefonów komórkowych. Sposoby lokalizacji z użyciem metody pomiaru poziomu sygnału RSSI są proste, ale raczej zawodne.
Największe odkrycie podczas poszukiwań działających rozwiązań lokalizacji to Quuppa [12]. Jest to nazwa fińskiej firmy, która po ponad 15 latach pracy opracowała metodę AoA z zastosowaniem transmisji Bluetooth [12]. Firma brała udział w tworzeniu nowego standardu przez konsorcjum SIG.
Opis specyfikacji „Direction Finding” jest zamieszczony w dokumencie Bluetooth Core Specification v5.1 [1]. Ma on 2985 stron oraz 28,863 MB. Nie jest łatwo poruszać się po tym dokumencie. Wewnętrznie jest podzielony na 8 wolumenów (vol) a te na części (part). Numeracja rozdziałów jest osobna dla każdej części. Dlatego wskazanie miejsca w dokumencie musi być bardzo dokładne. Informacje dotyczące AoA znajdują się głównie w trzech miejscach: opis metody (p.281), opis tonu ciągłego i próbkowania (p. 2733) oraz opis przełączania anteny (p.2671).
W specyfikacji Bluetooth v5.1 zostały określone dwie metody dokładnej lokalizacji (Bluetooth Core Specification Version 5.1 | Vol 1, Part A, p.281) [1]:
- Angle of Arrival (AoA): Kąt odbioru - określany jest względny kierunek, z którego fala radiowa nadawana przez pojedynczą antenę dociera do matrycy anten.
- Angle of Departure (AoD): Kąt nadawania - określany jest względny kierunek, z którego fala radiowa nadawana przez matrycę anten dociera do pojedynczej anteny.
Wymagania metod są w specyfikacji dosyć dokładnie określone. Obie wymagają (co najmniej) dwóch urządzeń BLE. Jedno urządzenie musi mieć matrycę anten (minimum dwie anteny) z przełącznikiem. Urządzenia muszą obsługiwać specjalny pakiet transmisji zawierający sygnał (ton ciągły). Jedno z urządzeń musi przy odbiorze specjalnego pakietu wykonywać próbkowanie kwadraturowe.
Ton ciągły (CTE, Constant Tone Extension)
Urządzenie BLE może umożliwić określenie kierunku nadajnika wobec odbiornika poprzez transmisję pakietów (direction finding enabled packets) zawierających sygnał Constant Tone Extension (CTE). Ton ciągły jest sekwencją samych jedynek, co oznacza modulację 250 kHz (Bluetooth Core Specification Version 5.1 | Vol 6, Part B, p.2733) [1]. Ton ciągły jest umieszczony na końcu pakietu, po CRC. Ton ciągły nie podlega wybielaniu ((whitening). Pakiet zawiera informacje o typie CTE, jego długości oraz o rozmiarze szczeliny czasowej. Ton ciągły może mieć długość od 16 ms do 160 ms, ze skokiem co 8 ms. Są dwa typy tonu ciągłego AoA oraz AoD.
Są różne formaty pracy z tonem ciągłym typu AoA CTE:
- Gdy nadawany jest ton ciągły typu AoA, to nadajnik nie przełącza anten (rysunek 1, góra).
- Gdy odbiornik obiera ton ciągły typu AoA, to musi wykonywać przełączanie anten (rys. 1, środek i dół).
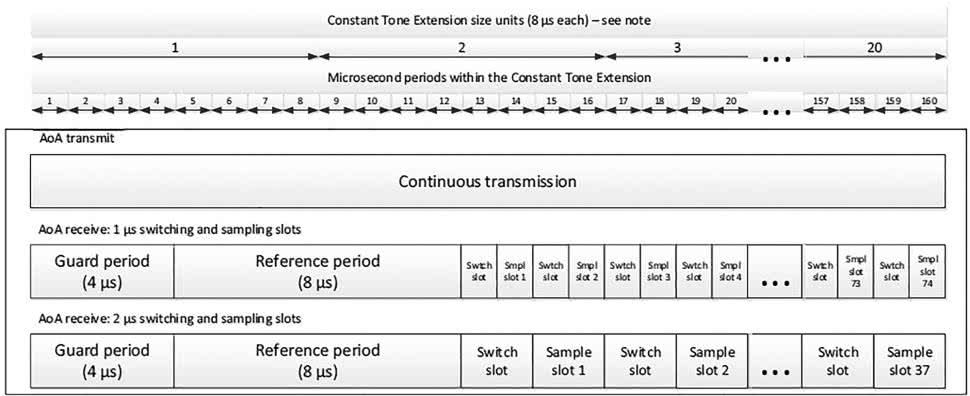
Pierwsze 4 ms są przeznaczone na okres bezpieczeństwa (guard). Następne 8 ms to okres odniesienia (reference period). Potem występuje seria par szczelin czasowych (slot) przełączania i próbkowania. Szczeliny czasowe mogą mieć szerokość 1 ms lub 2 ms. Organizacja tonu ciągłego typu AoD CTE jest podobna jak dla odbiornika typu AoA CTE.
Są różne formaty pracy z tonem ciągłym typu AoD CTE:
- Gdy nadawany jest ton ciągły typu AoD, to nadajnik przełącza anteny. Szczeliny mogą mieć szerokość 1 ms (rysunek 2, pierwszy z góry) lub 2 ms (rysunek 2, trzeci z góry).
- Gdy odbierany jest ton ciągły typu AoD, to odbiornik wykonuje próbkowanie (ważnych) próbek w odpowiednich szczelinach czasowych (rys. 2, drugi i czwarty z góry).

Próbkowanie kwadraturowe (IQ sample)
Próbkowanie kwadraturowe polega na uzyskiwaniu dwóch (pary) próbek. Jedna wartość jest „w fazie” (In-phase), a druga „w przeciwfazie” (Quadrature-phase). Przesunięte są one o 90°. Te dwie wartości zawierają informację zarówno o fazie, jak i amplitudzie sygnału [5].
Dla obu metod lokalizacji odbiornik musi wykonywać próbkowanie kwadraturowe w oknie próbkowania. Okno próbkowania ma 1 ms i próbkowanie jest wykonywane 0,125 ms po początku okna i 0,75 ms dalej, co daje jedną próbkę IQ (parę próbek sygnału). Próbkowanie jest wykonywane podczas okresu odniesienia, co daje 8 próbek IQ, oraz podczas wszystkich szczelin czasowych próbkowania tonu ciągłego. W zależności od długości tonu ciągłego daje to dodatkowo 2 do 72 próbki IQ dla szczelin 1 ms lub 1 do 37 próbek IQ dla szczelin 2 ms (rys. 2). Próbkowanie musi się odbywać dokładnie w tych samych momentach czasowych szczelin próbkowania, aby uzyskać wysoką jakość danych do pomiaru kąta. Odbiornik musi zebrać komplet próbek IQ dla co najmniej jednego tonu ciągłego [1].
Rysunek jest ilustracją najlepszego sposobu pokazania uzyskania danych. I tak na rysunku 3 pokazano próbki ADC sygnałów z kanału I oraz z kanału Q [9]. Próbkowanie jest wykonywane w sposób ciągły z częstotliwością 4 MHZ (okres 0,25 ms). Dane za czas 128 ms są zbierane do bufora. Na osi poziomej jest pokazany indeks próbki ADC, gdzie indeks 0 (zero) przypada na początek okresu odniesienia (8 ms). Na okres odniesienia przypadają pierwsze 32 próbki IQ. W tym obszarze sygnał wygląda jak przebieg sinusoidalny. Od próbki 32 następuje przełączanie anteny i w sygnale widać nieciągłość. Czas ustalania sygnału wynosi 0,25 ms. Dalej przez cały okres próbkowania (szczelina próbkowania) sygnał jest stabilny. W następnym oknie czasowym jest wykonywane przełączanie na kolejną antenę. I tak cyklicznie do końca tonu ciągłego.

Matryca anten
Urządzenie BLE może być wyposażone w matrycę anten (antenna array) składającą się co najmniej z dwóch anten oraz sterowaną przez przełącznik [1] (Bluetooth Core Specification Version 5.1 | Vol 6, Part A, p.2671). Urządzenie przełącza anteny, gdy odbiera ton ciągły typu AoA albo gdy nadaje ton ciągły typu AoD. Przełączanie może być wykonywane tylko podczas okresu bezpieczeństwa oraz okresu przełączania. Mogą być różne sekwencje przełączania anten, ale podczas okresu odniesienia musi pracować pierwsza antena.
Dla częstotliwości około 2,4 GHz, używanej w transmisji standardu BLE, długość fali wynosi około 0,125 m. Maksymalna odległość pomiędzy antenami w matrycy to połowa długości fali [5].
Metoda kąta odbioru (AoA)
Odbiorczy układ BLE nazywany lokalizatorem (locator) zawiera matrycę anten oraz przełącznik (rysunek 4). Nadajnik (nazywany beacon lub tag) ma tylko jedną antenę.
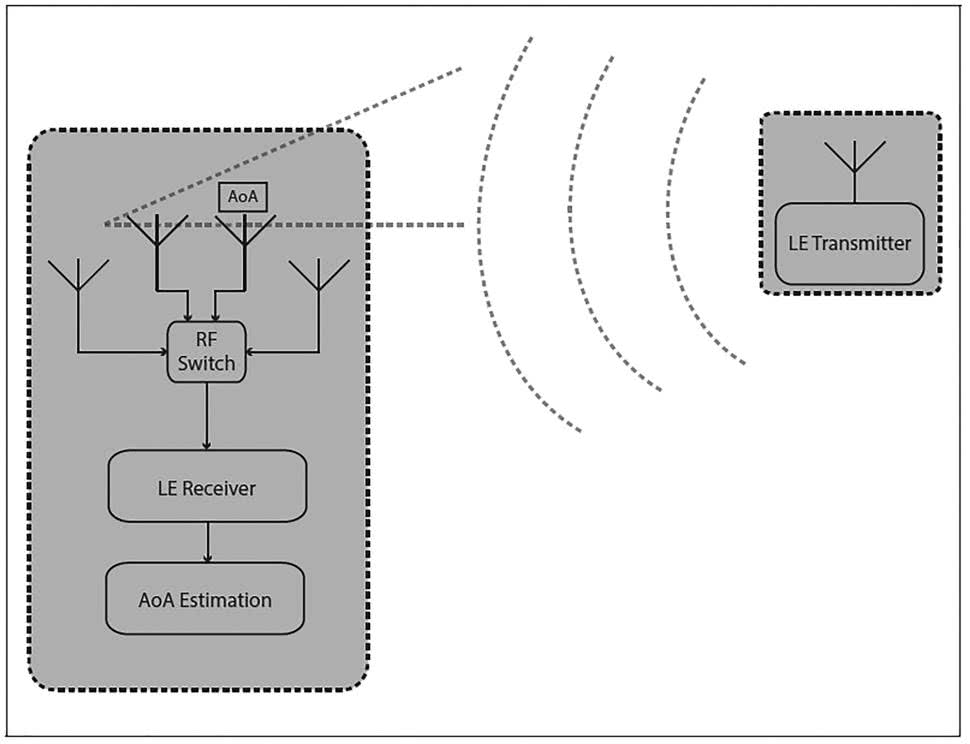
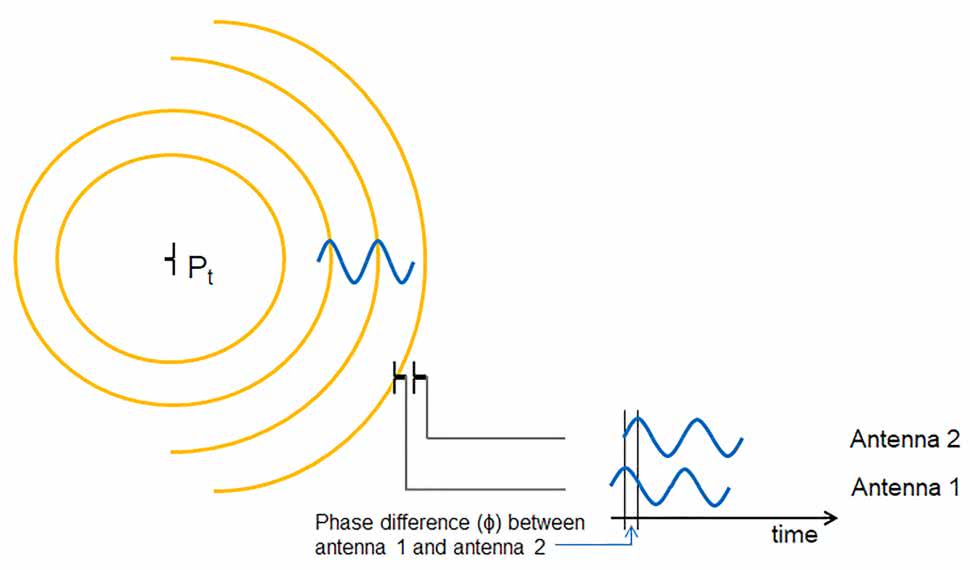
Bardzo uproszczony przykład działania dla matrycy składającej się z dwóch anten pokazano na rysunku 5. Fala radiowa tonu ciągłego typu AoA nadawanego przez nadajnik najpierw dociera do anteny 1, a potem do anteny 2 odbiornika. Przesunięcie fazy odbieranego przez anteny sygnału określa odstęp czasu (rysunek 6). Przy stałej prędkości propagacji fal radiowych daje to długość boku trójkąta prostokątnego przylegającego do kąta odbioru u (rys. 5). W specyfikacji Bluetooth v5.1 jest podany bardzo podstawowy sposób estymacji tego kąta [1]. Przy znanej odległości pomiędzy antenami wystarczy do określenia kąta odbioru u policzyć arcus cosinus. Odbiornik wykonuje próbkowanie kwadraturowe i wykonuje obliczenia kąta odbioru.
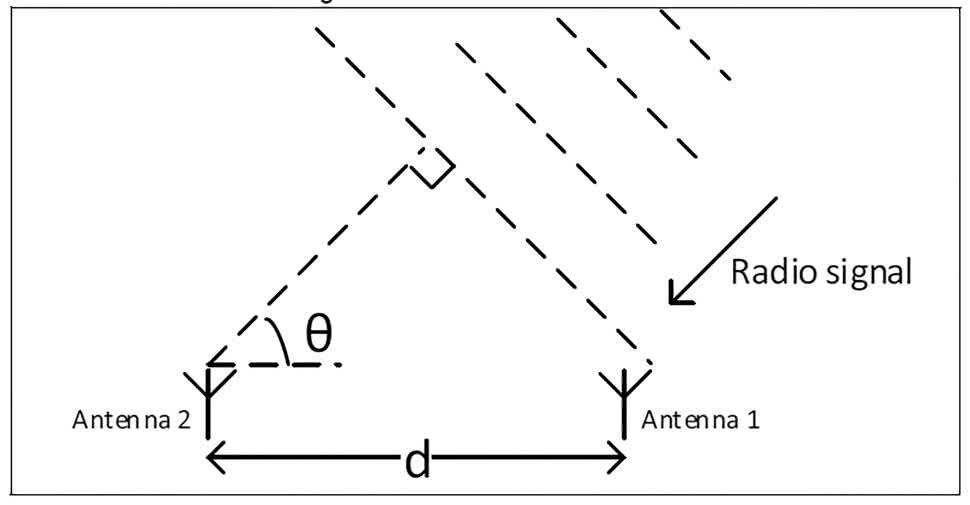
W praktyce obliczenia są dużo bardziej skomplikowane. Sygnał odbierany jest sumą różnych składowych zawierających fale opóźnione i silne fale odbite, zakłócenia i zmiany polaryzacji [5].
Rezultat obliczeń jest wysyłany do sieci, gdzie wykonywane są obliczenia pozycji. Oznacza to, że operacje wymagające większego poboru mocy są wykonywane po stronie systemu sieciowego. Układ śledzony (tag) wymaga bardzo małej mocy zasilania.
Metoda kąta nadawania (AoD)
W metodzie kąta nadawania (AoD) role się odwracają w porównaniu do metody kąta odbioru (AoA). Teraz nadajnik zawiera matrycę anten oraz przełącznik (rysunek 7), a odbiornik ma tylko jedną antenę.
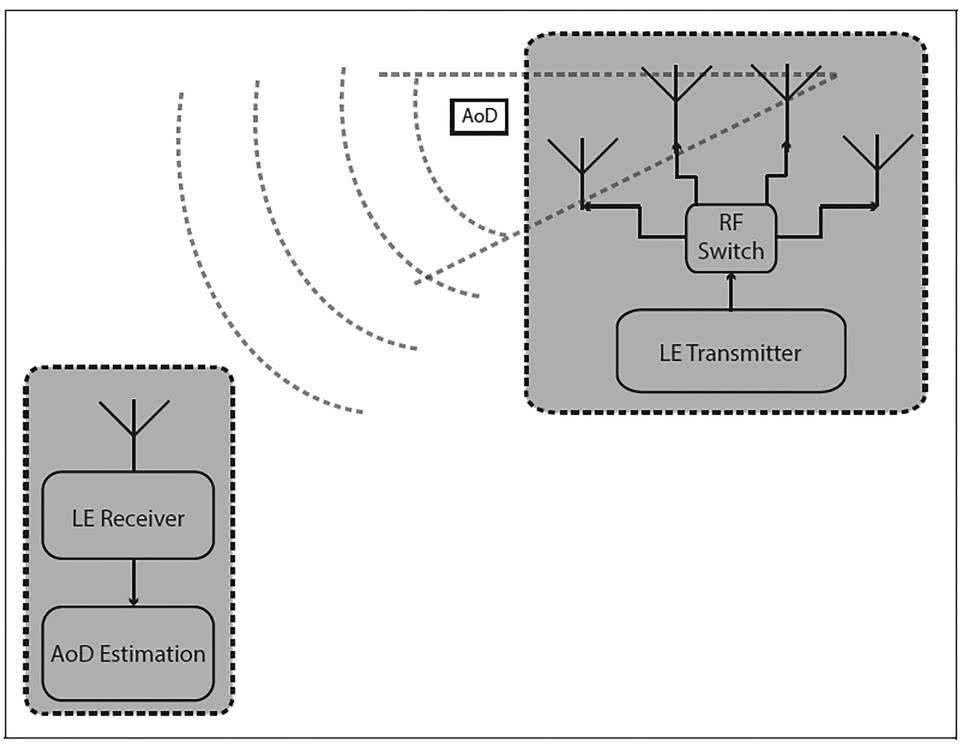
Fala radiowa tonu ciągłego typu AoD jest wysłana przez matrycę anten nadajnika. Określanie kierunku jest wykonywane na podstawie opóźnienia czasowego sygnału nadawanego przez różne anteny matrycy nadajnika.
Teraz odbiornik wykonuje próbkowanie kwadraturowe i dokonuje obliczenia kąta nadawania. Do tego potrzebne są odbiornikowi informacje o konfiguracji matrycy anten nadajnika. Smartfon może bardzo dobrze pracować jako odbiornik.
Lokalizacja przestrzenna
Matryce anten mogą być różne zorganizowane. Najprostsza organizacja to antena liniowa, gdzie anteny ustawione są w jednej linii. Przy założeniu, że nadajnik i odbiornik są umieszczone w jednej płaszczyźnie, można określić tylko azymut. W przypadku zastosowania dwuwymiarowej matrycy anten można już mierzyć azymut oraz elewację (dla połówki sfery) [5]. Zastosowanie dwóch lub więcej matryc anten umożliwia stosowanie metody triangulacji przestrzennej.
Lokalizacja w czasie rzeczywistym
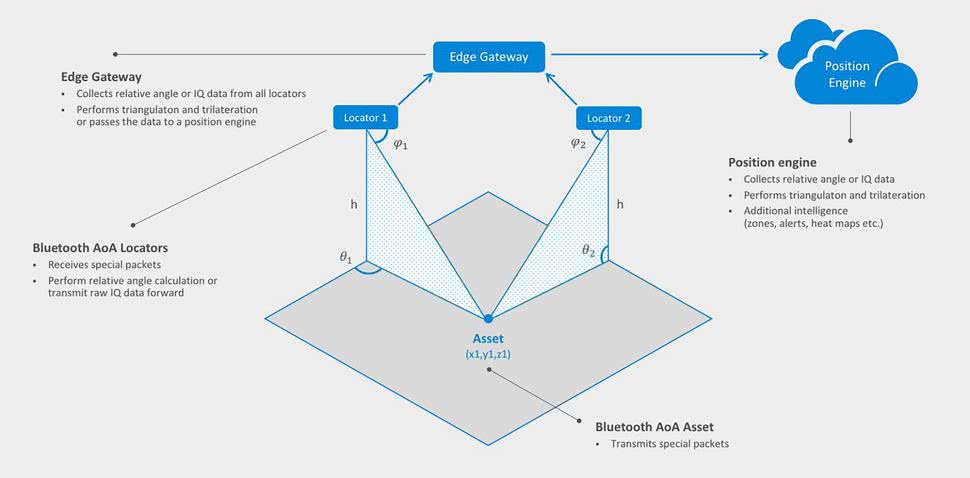
Metoda kąta odbioru (AoA) umożliwia realizację bardzo dokładnego systemu lokalizacji w czasie rzeczywistym (RTLS - real-time locating systems).
Śledzony obiekt wymaga standardowego urządzenia Bluetooth Low Energy z pojedynczą anteną i z obsługą standardu AoA. Może być urządzeniem z niskim poborem mocy i jednocześnie obsługiwać wszystkie inne funkcjonalności BLE.
Lokalizatory, zainstalowane w pomieszczeniach, muszą być wyposażone i obsługiwać matryce anten. Mogą też wykonywać obliczenia kierunku. Dane z wszystkich lokalizatorów Bluetooth są zbierane razem, np. są wysyłane do bramki sieciowej. Tutaj mogą być wykonywane kolejne obliczenia np. triangulacji. Następnie obliczenia lokalizacji wykonywane są np. w chmurze obliczeniowej. Przykład takiego zorganizowania systemu RTLS pokazano na rysunku 8. Wykonywanie obliczeń na surowych danych bezpośrednio w miejscu ich uzyskania pozwala na natychmiastową weryfikację tych danych oraz zmniejsza wymagania na przepustowość łącza do wysyłania rezultatów.
Pozycjonowanie w pomieszczeniach
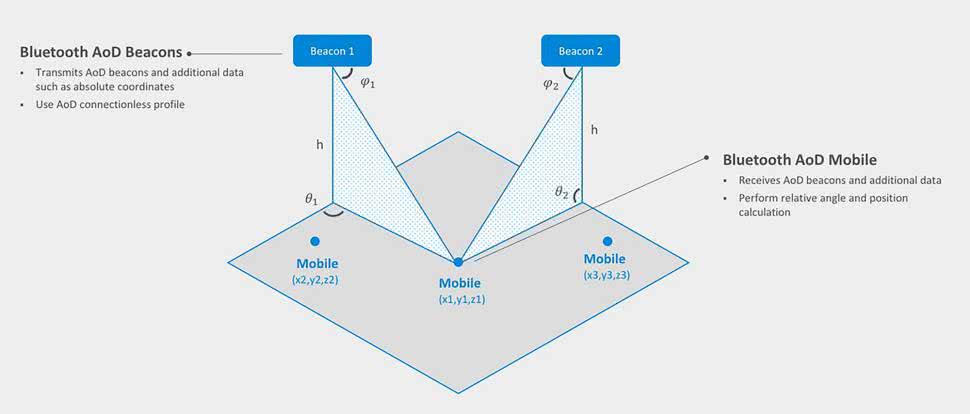
Metoda kąta nadawania (AoD) umożliwia realizację bardzo dokładnego systemu pozycjonowania w pomieszczeniach (IPS - indoor positioning systems). W systemach IPS sytuacja jest odwrotna niż w systemach RTLS. Tutaj to samo urządzenie BLE obiektu wykonuje wszystkie obliczenia, lecz wymagania sprzętowe są takie same.
Śledzony obiekt wymaga standardowego urządzenia Bluetooth Low Energy z pojedynczą anteną i z obsługą standardu AoD. Może jednocześnie obsługiwać wszystkie inne funkcjonalności BLE. Nadajniki (beacon), zainstalowane w pomieszczeniach, muszą mieć i obsługiwać matryce anten oraz nadawać ramki AoD.
Przykład takiego zorganizowania systemu IPS pokazano na rysunku 9. Urządzeniem realizującym pozycjonowanie może być zwykły telefon komórkowy z obsługą algorytmów standardu AoD. Użytkownik systemu musi uzyskać dane o pozycji nadajników. System IPS może obsługiwać jednocześnie (dowolnie) wielu użytkowników.
Realizacja matrycy anten
Praktyczną realizację systemu pracującego metodą AoA pokazuje zestaw rozszerzeń „SimpleLink Angle of Arrival BoosterPack (BOOSTXL-AOA) firmy Texas Instruments [8]. Budowę zestawu pokazano na rysunku 10. Pracuje on razem z zestawem startowym CC2640R2 tej firmy. Zestaw obsługuje specyfikację Bluetooth 4.1, lecz sposób pracy jest bardzo zbliżony do sposobu opisanego w specyfikacji Bluetooth v5.1 [1].
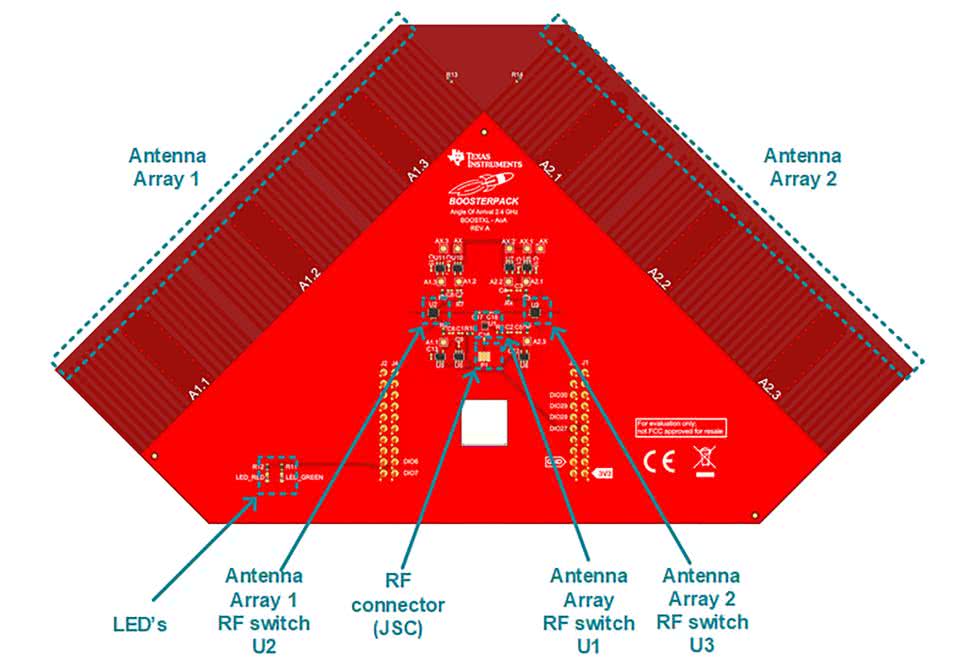
Płytka zestawu BOOSTXL-AoA zawiera dwie ortogonalne matryce anten, każda po trzy dipole. Anteny są rozsunięte na odległość trochę większą niż ¼ długości fali. Każda antena pokrywa teoretycznie obszar o kącie ±90°. Gdy matryce są używane razem, to pokrywają kąt ±135° (gdzie pokrycie zachodzi na siebie dla 45° po każdej stronie). Każdy dipol matrycy jest poprzez balun dołączony do potrójnego przełącznika, a następnie podwójny przełącznik jest dołączony do gniazdka antenowego procesora komunikacyjnego CC2640R2.
Na rysunku 11 pokazano ustawienie zestawu BOOSTXL-AoA w komorze bezechowej. Nadajnik został umieszczony w odległości 2,8 m od odbiornika (matryc anten). Podczas testów zestaw BOOSTXL-AoA z antenami był obracany tak, że sygnał wejściowy przychodził z kierunku przesuniętego od -100° do 100° [8].
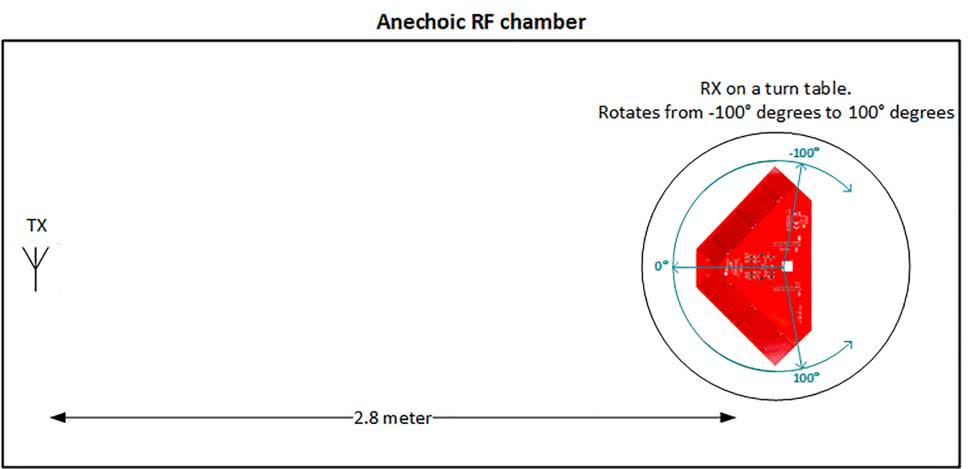
Ton ciągły AoA był wysyłany we wszystkich kanałach rozgłaszania: 37, 38 oraz 39. Obliczenia kąta nadawania były wykonywane jako średnia wyników dla trzech pakietów dla tych trzech częstotliwości. Dokładność pomiarów kąta w komorze bezechowej wynosi ±4°. Dobrze to obrazuje niezawodność pracy metody AoA oraz stabilność warunków pomiaru. Jednak próby przeprowadzane w otoczeniu użytkowym dają zmienność rzędu 20°. Dotyczy to obliczeń bez zastosowanego specjalnego filtru oraz bez technik ograniczania wpływu odbić wielokrotnych. Doniesienia z innych badań też potwierdzają stabilną pracę, nawet w bardzo niekorzystnych warunkach [7].
Za to informacje o dokładności określania odległości nie są zgodne. Wymienia się dokładność pozycjonowania w granicach jednego metra [4], 0,5 m [5] lub nawet wielu centymetrów [3]. Jednak zawsze jest zamieszczane zastrzeżenie, że dokładność bardzo zależy od konkretnych warunków pracy.
Praktyczne realizacje
Firma Silicon Labs udostępnia układy scalone do obsługi technologii Direction Finding specyfikacji Bluetooth 5.1 [4].
Układy BGM13S i BGM13P obsługują standard Bluetooth 5 oraz rozszerzenia AoA i GATT caching specyfikacji Bluetooth 5.1. Układy SoC serii EFR32BG13P Blue Gecko obsługują standard Bluetooth 5 oraz rozszerzenia AoA, AoD i GATT caching specyfikacji Bluetooth 5.1. Najciekawszy w serii jest układ EFR32BG13P733F512GM48, który umożliwia pracę dwuzakresową w pasmie 2,4 GHz oraz w pasmie 169 MHz do 915 MHz [11]. Firma udostępnia stos z obsługą Direction Finding oraz projekt referencyjny matrycy antenowej z płytką radiową [4].
Jednak na firmowym forum dyskusyjnym okazuje się, że to udostępnianie jest tylko dla wybranych użytkowników. Pełny dostęp do tych możliwości dopiero będzie.
Pokaz wideo przygotowany przez firmę Silicon Labs bardzo przekonująco uwidacznia możliwości nowej technologii lokalizacji (28.01.2019) [6]. Na rysunku 12 zamieszczono obrazek z prezentacji określania kierunku w czasie rzeczywistym. Zastosowano proste urządzenie BLE (trzymane w ręku) oraz mały lokalizator (leży na stole).

Prace badawcze
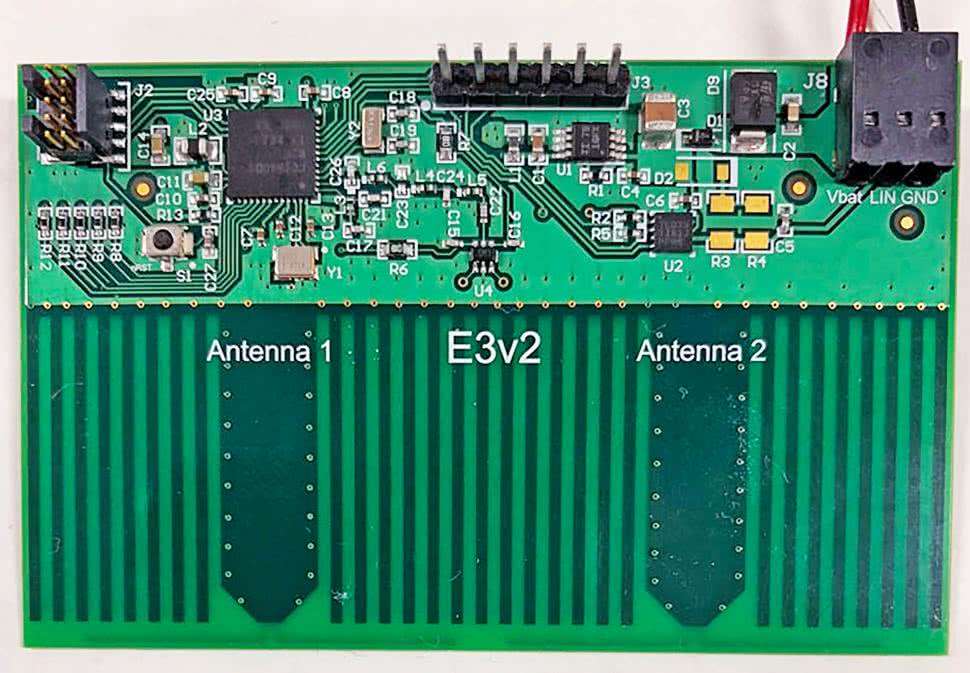
Firma Texas Instruments udostępnia projekt referencyjny TIDA-01632 systemu przeznaczonego do lokalizacji kluczyków samochodowych [13]. Zastosowany został tam układ scalony SimpleLink CC2640R2F-Q1 ze specyfikacją „automotive”. System realizuje metodę AoA z zastosowaniem tylko dwóch anten dipolowych (rysunek 13). Do obliczeń triangulacji i trilateracji jest wykorzystywana firmowa biblioteka Real Time Locationing System (RTLS) Toolbox. Obliczone wartości RSSI oraz kąta są wysyłane poprzez łącze LIN do systemu komputerowego samochodu. Płytka drukowana systemu ma rozmiary 45,72 mm × 76,2 mm. System charakteryzuje się bardzo małym poborem mocy do 24 mA (14 V) w stanie uśpienia.
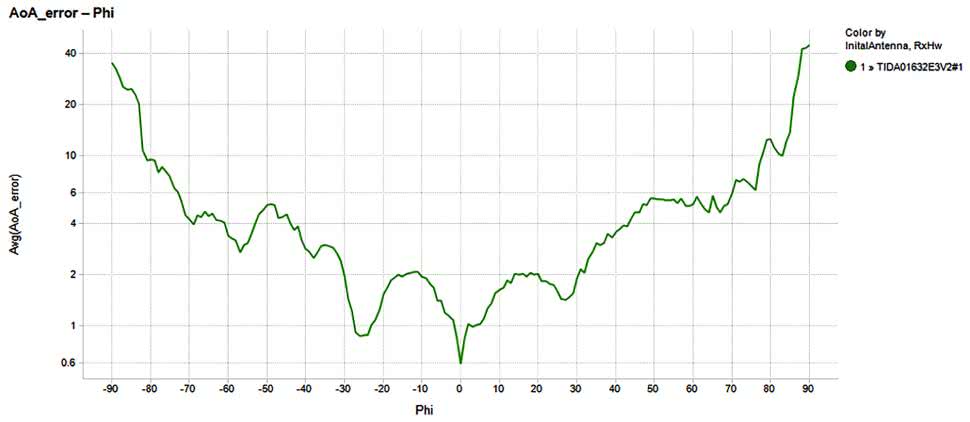
Błąd pomiaru kąta obrotu systemu TIDA-01632 mierzony w komorze bezechowej z wykorzystaniem wartości średniej pomierzonej dla 13 różnych kanałów BLE pokazano na rysunku 14. Dla matrycy dwóch anten dipolowych udało się uzyskać błąd poniżej 10º dla kątów w zakresie ±80º. Jest to dużo gorszy rezultat niż w przypadku zastosowania ortogonalnej matrycy anten.
Pokaz wideo przygotowany przez firmę Texas Instruments pokazuje możliwości nowej technologii lokalizacji (9.01.2019) [14]. Dwa systemy TIDA-01632 są zamontowane na drzwiach samochodowych (rysunek 15). Rezultat pozycjonowania kluczy trzymanych w ręku jest widoczny w czasie rzeczywistym na ekranie wiszącym na ścianie.

System lokalizacji
Sama metoda określania kierunku to za mało. Nowy standard określa tylko sposób wysyłania i odbierania sygnału pomiędzy urządzeniami. Potrzebne są jeszcze zaawansowane algorytmy obróbki danych, aplikacje przyjazne dla użytkownika oraz zestrojenie całości do stabilnej i niezawodnej pracy.
Wszytko to oferuje Quuppa Intelligent Locating System [12]. Opracowany po ponad 15 latach unikalny algorytm pozycjonowania sprawdza się w wielu rozwiązaniach przemysłowych. Firma oferuje zaawansowane lokalizatory i znaczniki (tagi) oraz wiele pakietów programowych. System można zintegrować z dowolną istniejącą infrastrukturą komunikacyjną. System zapewnia dokładność lokalizacji do 10 cm z opóźnieniem do 100 ms [12].
Kierunki rozwoju
Okazuje się, że występuje problem z podglądem pakietów transmisji CTE (tonu) z wykorzystaniem sniffera. Zwykłe pakiety BLE są wysyłane z wykonywaniem procedury wybielania (whitening - LFSR). Jednak nie jest ona używana dla nadawania tonu ciągłego. Sniffer stosuje przy odbiorze procedurę korekcji wybielania do całego pakietu, także do odebranego ciągu jedynek (tonu ciągłego AoA). Daje to w rezultacie ciąg pseudolosowy.
Autorskie rozwiązanie metod komunikacji dla lokalizacji opracowane przez firmę Texas Instruments bardzo przypomina rozwiązanie, które SIG ogłosił w specyfikacji 5.1. Wszelkie modyfikacje obecnego rozwiązania będą łatwe do zrealizowania w celu wykorzystania obecnego rozwiązania do wymagań wersji 5.1. Firma jest w trakcie adaptowania specyfikacji 5.1 do układów serii CC26x2 i CC13x2.
Również firma Nordic Semicoductor ogłosiła 26.02.2019 inaugurację nowego układu scalonego nRF52811. Ma on rozszerzenie sprzętowe pozwalające na pełną obsługę standardu Bluetooth 5.1 Direction Finding. Nowy układ ma zasoby podobne jak dotychczasowy układ nRF52810, jednak obsługuje wiele standardów komunikacji, jak większy układ nRF52840. Na razie dostępne są próbki układu tylko dla wybranych użytkowników. Większa dostępność układów oraz oprogramowanie firmowe do ich obsługi jest obiecane później w roku 2019.
Specyfikacja Bluetotth 5.1 to dopiero pierwszy, ale bardzo istotny krok wprowadzania nowej technologii. Wymagane jest na przykład opracowanie nowych profili BLE do obsługi metod AoA oraz AoD. Według doniesień są one w końcowej fazie tworzenia [3].
Możliwości zastosowania nowej technologii są ogromne. Do jej zastosowania wystarczą dotychczasowe telefony komórkowe i dodanie w wybranych pomieszczeniach kilku lokalizatorów/nadajników. Możliwe będzie uruchomienie dokładnych systemów lokalizacji/pozycjonowania w szpitalach, centrach handlowych, na lotniskach, w muzeach, magazynach itd.
Henryk A. Kowalski
Instytut Informatyki
Politechnika Warszawska
Bibliografia
- Bluetooth Core Specification v5.1, 21 January 2019, SIG, http://bit.ly/2Ywvotr
- Bluetooth Core Specification v5.1, Feature Overview, Martin Woolley, 28 January 2019, SIG, http://bit.ly/2UgqYHL
- Enhancing Bluetooth Location Services with Direction Finding, SIG, http://bit.ly/2OxhFxY
- Bluetooth Direction Finding: Angle of Arrival (AoA) and Angle of Departure (AoD), Silicon Labs, http://bit.ly/2UgrB45
- Bluetooth Angle Estimation for Real-Time Locationing, Sauli Lehtimäki, Silicon Labs, http://bit.ly/2uDk6pn
- Angle of Arrival - Bluetooth 5.1 Direction Finding Explanation, Video, 28 sty 2019, Silicon Labs, http://bit.ly/2FzELjm
- Bluetooth 5.1 Puts Bluetooth In Its Place, John Leonard, January 30, 2019, Nordic Semiconductors, http://bit.ly/2V1gvgH
- SimpleLink Angle of Arrival BoosterPack, BOOSTXL-AOA, Texas Instruments, http://bit.ly/2TMbAyQ
- RTLS Toolbox, SimpleLink CC2640R2 SDK BLE-Stack User’s Guide for *Bluetooth* 4.2, ver. 3.02.02.00, 22 Jan 2019, Texas Instruments, http://bit.ly/2V10CH2
- Bluetooth Low Energy Angle of Arrival (AoA), Simple Link Academy, v:2.40, Texas Instruments, http://bit.ly/2UYw4W9
- EFR32BG13P733F512GM48 Bluetooth Low Energy (LE) and Bluetooth 5 Blue Gecko SoC, Silicon Labs, http://bit.ly/2r0oAVN
- How to compare different RTLS technologies?, 26 November 2018, Quuppa, http://bit.ly/2CIBNbD
- Automotive Bluetooth® low energy car access satellite node reference design, TIDA-01632, 15 Jan 2019, Texas Instruments, http://bit.ly/2V3L3OG
- Localization with BLE, Video, January 9, 2019, Texas Instruments, http://bit.ly/2WuuWKq












