 Zaloguj
Zaloguj



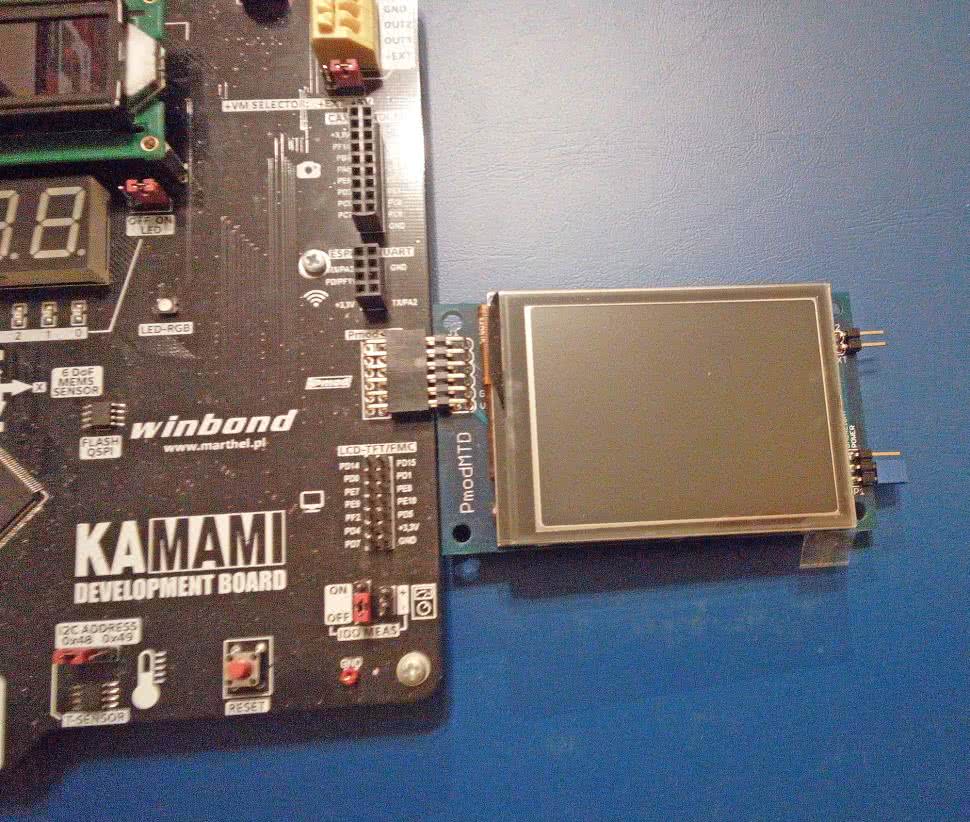
Moduł PmodMTDS ma kolorowy wyświetlacz graficzny o rozdzielczości 320×240 pikseli z panelem dotykowym mogącym obsłużyć do dwóch punktów dotyku. Dodatkowo moduł wyposażono w gniazdo microSD przeznaczone dla karty pamięci zawierającej grafiki do wykorzystania w aplikacji (fotografia 1). Do kontroli wyświetlacza służy mikrokontroler PIC32MZ, z którym można się komunikować za pośrednictwem interfejsu SPI.

Do obsługi kontrolera znajdującego się na płytce PmodMTDS służy dostarczona przez producenta biblioteka MTDS zaimplementowana w języku C++. Można ją pobrać ze strony: http://bit.ly/2TIchZI. Jest ona przeznaczona dla platformy Arduino, jednak na potrzeby niniejszego przykładu została zmodyfikowana, aby współpracowała z zestawem KAmeLeon.
Biblioteka składa się z dwóch warstw: mtds oraz MyDisp. Pierwsza z nich zawiera interfejs umożliwiający komunikację z kontrolerem wyświetlacza i udostępniający podstawowe operacje graficzne. Moduł MyDisp stanowi warstwę nadrzędną, ułatwiającą korzystanie z wyświetlacza oraz rozszerzającą funkcjonalność warstwy niższej. W przykładzie pokazano, w jaki sposób można korzystać z obu warstw w celu zbudowania prostego interfejsu graficznego. Ze względu na wielkość interfejsów obu warstw zostaną opisane tylko te metody, które wykorzystano w przykładowej aplikacji. Umożliwiają one wyświetlanie tekstu na wyświetlaczu oraz tworzenie przycisków obsługiwanych za pomocą panelu dotykowego.
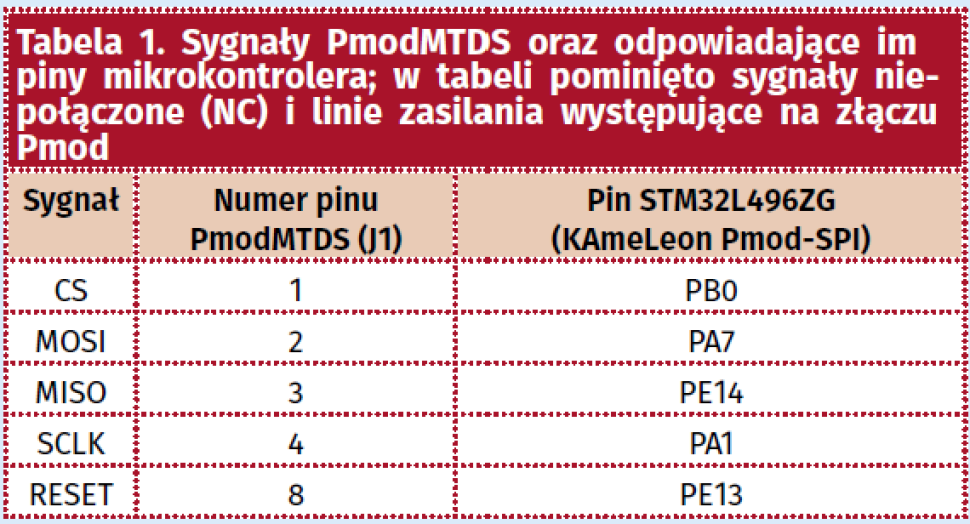
Moduł PmodMTDS ma 12-pinowe złącze typu 2A z interfejsem SPI oraz sygnałem RESET. Może być ono dołączone do gniazda Pmod-SPI zestawu KameLeon, tak jak na fotografii 1. Piny mikrokontrolera i odpowiadające im sygnały modułu PmodMTDS zostały przedstawione w tabeli 1.
Konfiguracja i obsługa interfejsu SPI dla modułu jest zaimplementowana w pliku MtdsHal.cpp w warstwie mtds. Znajdujące się tam funkcje zostały zmodyfikowane tak, aby moduł PmodMTDS mógł działać razem z zestawem KAmeLeon.
Ich fragmenty znajdują się na listingach 1 i 2. Pierwsza z nich - MtdsHalInitSpi, jest odpowiedzialna za inicjalizację interfejsu SPI1 w trybie 0 (CPOL = 0, CPHA = 0) z programową kontrolą linii CS, natomiast druga - MtdsHalPutSpiByte, realizuje transmisję i odczyt bajtu przez SPI.
void MtdsHalInitSpi(uint32_t pspiInit, uint32_t frq)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_SPI1_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;
GPIO_InitStruct.Pin = GPIO_PIN_1 | GPIO_PIN_7;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_14;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pin = GPIO_PIN_0;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
pmodMtdsSpi.Instance = SPI1;
pmodMtdsSpi.Init.Mode = SPI_MODE_MASTER;
pmodMtdsSpi.Init.Direction = SPI_DIRECTION_2LINES;
pmodMtdsSpi.Init.DataSize = SPI_DATASIZE_8BIT;
pmodMtdsSpi.Init.CLKPolarity = SPI_POLARITY_LOW;
pmodMtdsSpi.Init.CLKPhase = SPI_PHASE_1EDGE;
pmodMtdsSpi.Init.NSS = SPI_NSS_SOFT;
pmodMtdsSpi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
pmodMtdsSpi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodMtdsSpi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodMtdsSpi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
HAL_SPI_Init(&pmodMtdsSpi);
}
uint8_t MtdsHalPutSpiByte(uint8_t bSnd)
{
uint8_t bRcv;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&pmodMtdsSpi, &bSnd, &bRcv, 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
return bRcv;
}
Oprócz obsługi SPI, w pliku MtdsHal.cpp zostały zmodyfikowane także funkcje odpowiedzialne za zarządzanie czasem:
- MtdsHalTmsElapsed - zwracająca liczbę milisekund od startu programu,
- MtdsHalDelayMs i MtdsHalDelayUs - wprowadzające zadane opóźnienie.
Funkcje zostały zaimplementowane przy użyciu wywołań z biblioteki STM32Cube: HAL_GetTick i HAL_Delay. Do obsługi modułu zmieniona została także funkcja MtdsHalResetDisplay, ustawiająca niski stan na wyprowadzeniu RESET przez 1 ms w celu wyzerowania układu.
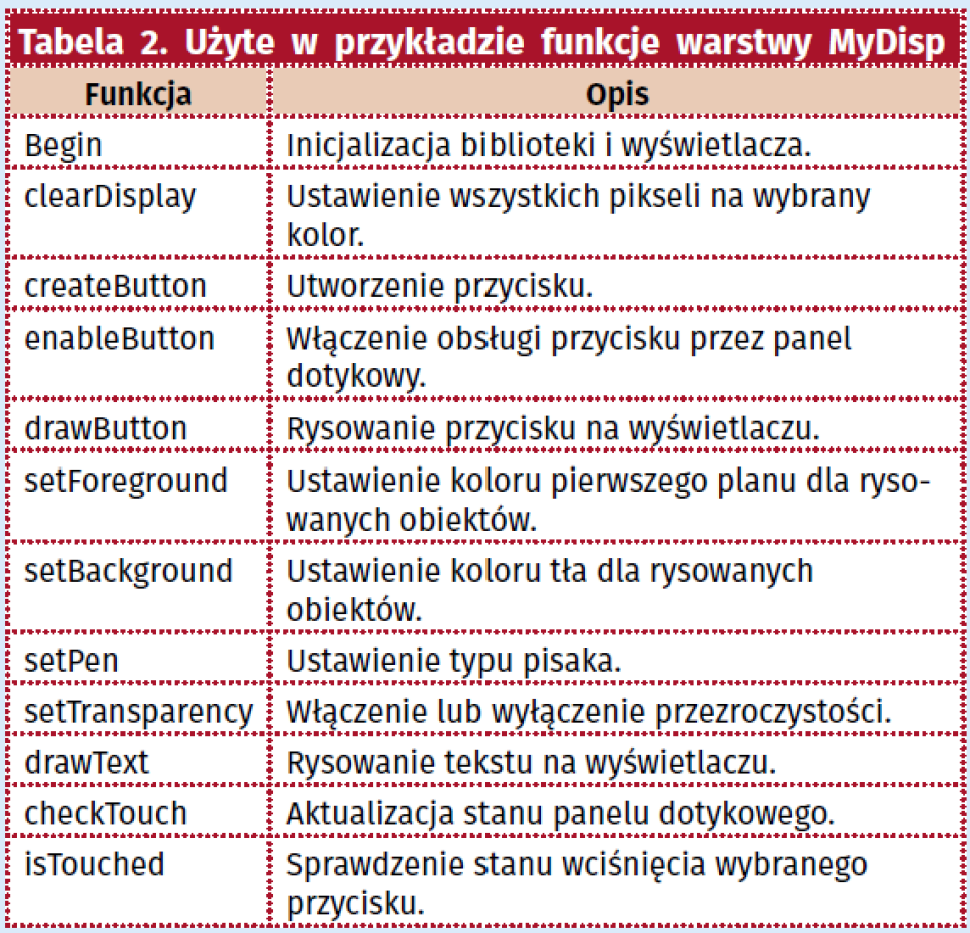
Obsługa wyświetlacza w prezentowanym przykładzie odbywa się przy użyciu obu warstw dostarczonej biblioteki. Warstwa MyDisp zawiera wysokopoziomowe funkcje do inicjalizacji wyświetlacza oraz rysowania podstawowych komponentów interfejsu, takich jak przyciski, tekst i proste kształty geometryczne. Umożliwia ona też korzystanie z panelu dotykowego. Lista funkcji warstwy MyDisp użytych w przykładzie znajduje się w tabeli 2.
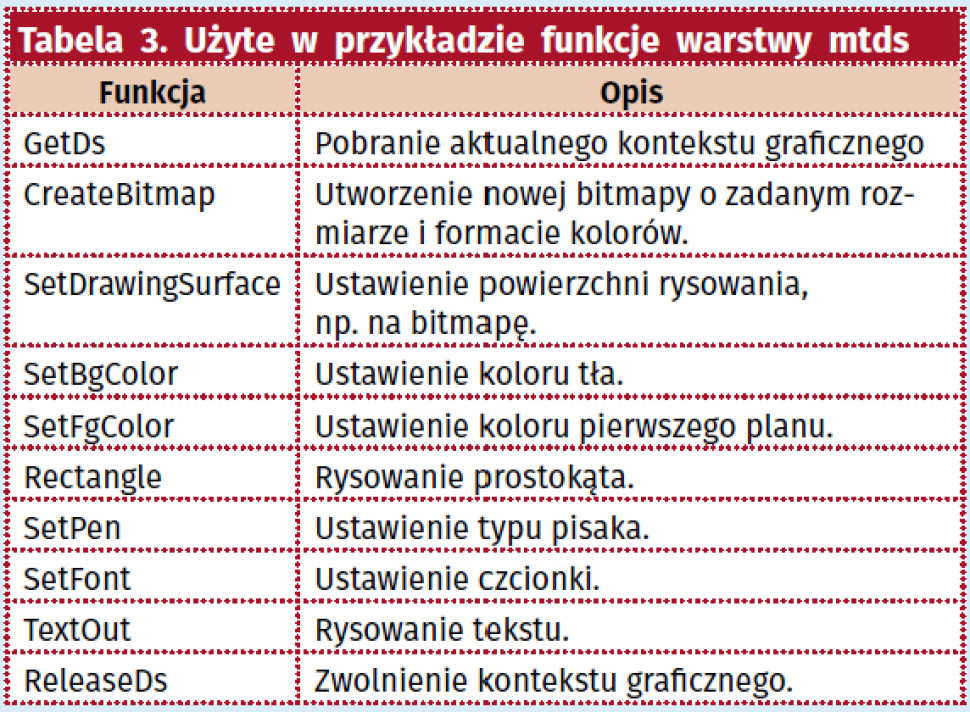
Druga z warstw - mtds, również może być użyta do rysowania kształtów i tekstu, jednak w przykładzie została wykorzystana jej możliwość generowania bitmap dla przycisków warstwy MyDisp. Tworzone bitmapy mogą być używane wielokrotnie, dzięki czemu można na przykład utworzyć różne motywy graficzne dla przycisków.
Lista użytych funkcji warstwy mtds została przedstawiona w tabeli 3.
Przykładowy interfejs jest generowany w funkcji main, która została przedstawiona na listingach 3 i 4. Pierwszy z nich zawiera generowanie bitmapy dla przycisku. Znajdują się na nim dwie zmienne - HDS - reprezentująca kontekst graficzny oraz HBMP będąca uchwytem do tworzonej bitmapy. Sama bitmapa jest tworzona przez odpowiednie ustawienie powierzchni rysowania (SetDrawingSurface) i nanoszenie na nią kształtów i tekstu.
HDS hds;
HBMP hbmp;
hds = mtds.GetDs();
hbmp = mtds.CreateBitmap(80, 30, 16);
mtds.SetDrawingSurface(hds, hbmp);
mtds.SetBgColor(hds, clrWhite);
mtds.SetFgColor(hds, clrBlack);
mtds.Rectangle(hds, 0, 0, 100, 50);
mtds.SetPen(hds, penSolid);
mtds.SetFont(hds, hfntConsole);
mtds.TextOut(hds, 20, 10, 5, „HELLO”);
mtds.ReleaseDs(hds);
dotykowego w funkcji main
int main(void)
{
HAL_Init();
SystemClock_Config();
mydisp.begin();
mydisp.clearDisplay(clrMedBlueGray);
//...
//Tu tworzenie bitmapy z Listingu 3.
//...
mydisp.createButton(0, hbmp, hbmp, 10, 110);
mydisp.enableButton(0, true);
mydisp.drawButton(0, BUTTON_UP);
mydisp.setForeground(clrBlack);
mydisp.setBackground(clrDkGreen);
mydisp.setPen(penSolid);
mydisp.setTransparency(false);
mydisp.drawText((char*) „Hello PmodMTDS!”, 50, 200);
mydisp.drawText((char*) „This example shows how to use”, 4,
160);
mydisp.drawText((char*) „ the PmodMTDS With the „, 4,
169);
mydisp.drawText((char*) „ KAmeLeon board „, 4,
178);
char textBuffer[32];
int touchCounter = 0;
while (1)
{
mydisp.checkTouch();
if (mydisp.isTouched(0))
{
sprintf(textBuffer, „Counter: %d”, touchCounter++);
mydisp.drawText(textBuffer, 100, 120);
}
}
}
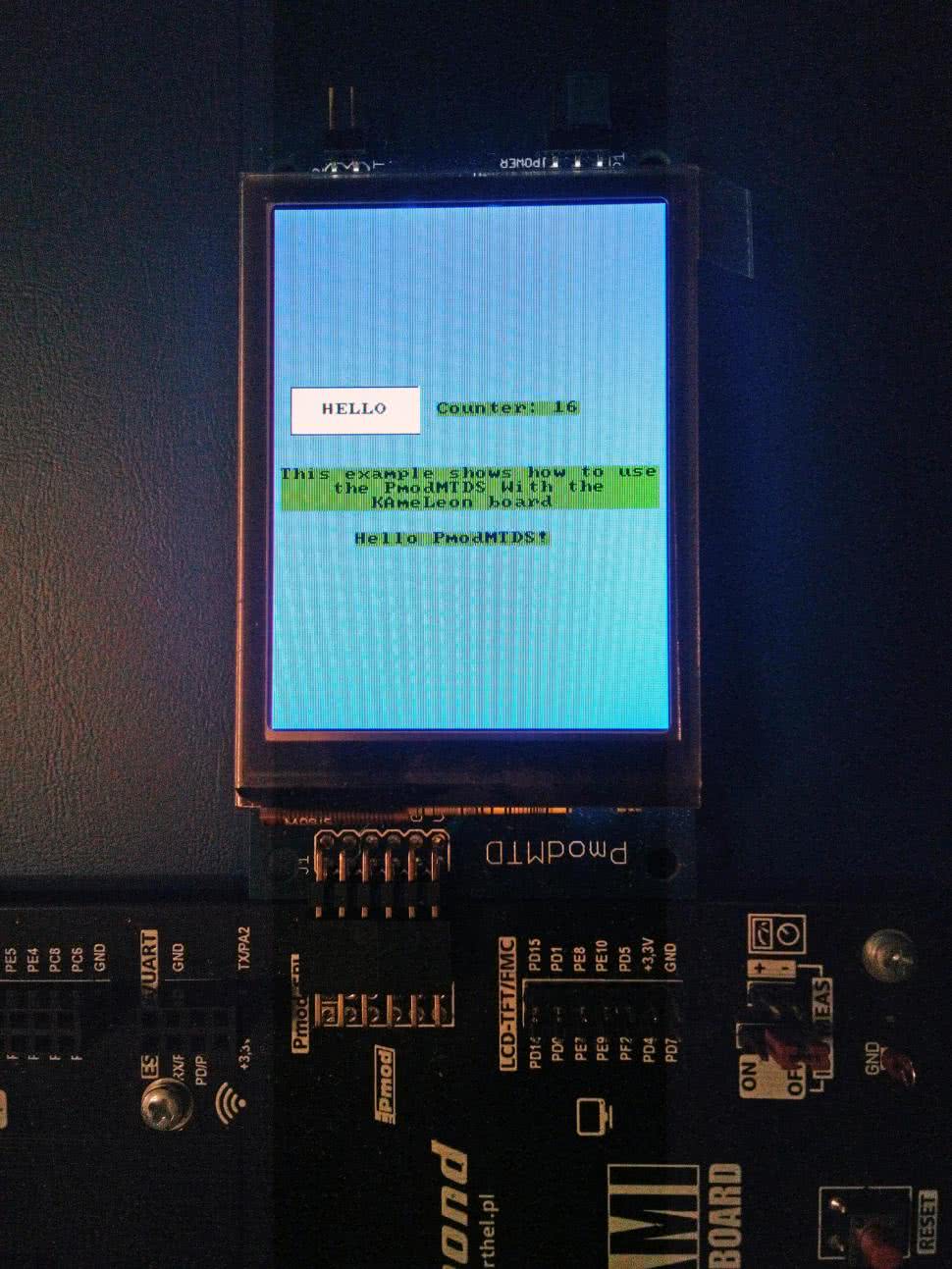
W pozostałej części funkcji main (listing 4) jest inicjalizowany moduł PmodMTDS oraz tworzone są tekst i przycisk, który dodatkowo wykorzystuje przygotowaną bitmapę. W pętli głównej programu cyklicznie aktualizowany jest stan panelu dotykowego. Jeżeli wykryte zostało wciśnięcie przycisku, to dodatkowo zwiększany jest licznik wyświetlany na ekranie. Efekt działania aplikacji został przedstawiony na fotografii 2.
PmodRTCC jest drugim z prezentowanych w tej części modułów (fotografia 3). Jest to zegar czasu rzeczywistego z kalendarzem oparty na układzie Microchip MCP79410. Układ ten umożliwia dodatkowo ustawienie dwóch alarmów, generowanie fali prostokątnej oraz korzystanie z pamięci EEPROM (128B) i SRAM (64B). Do obsługi modułu PmodRTCC została udostępniona biblioteka RTCCI2C dostępna na stronie producenta: http://bit.ly/2Uj9SJn. Jest ona przeznaczona dla środowiska MPIDE, dlatego na potrzeby opisywanego przykładu musiała ona zostać modyfikowana tak, aby mogła być użyta w środowisku Atollic z mikrokontrolerem STM32L496ZGT6.
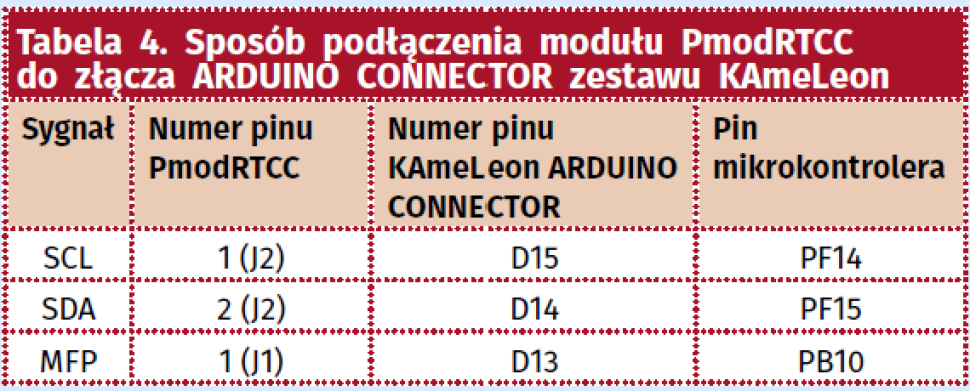
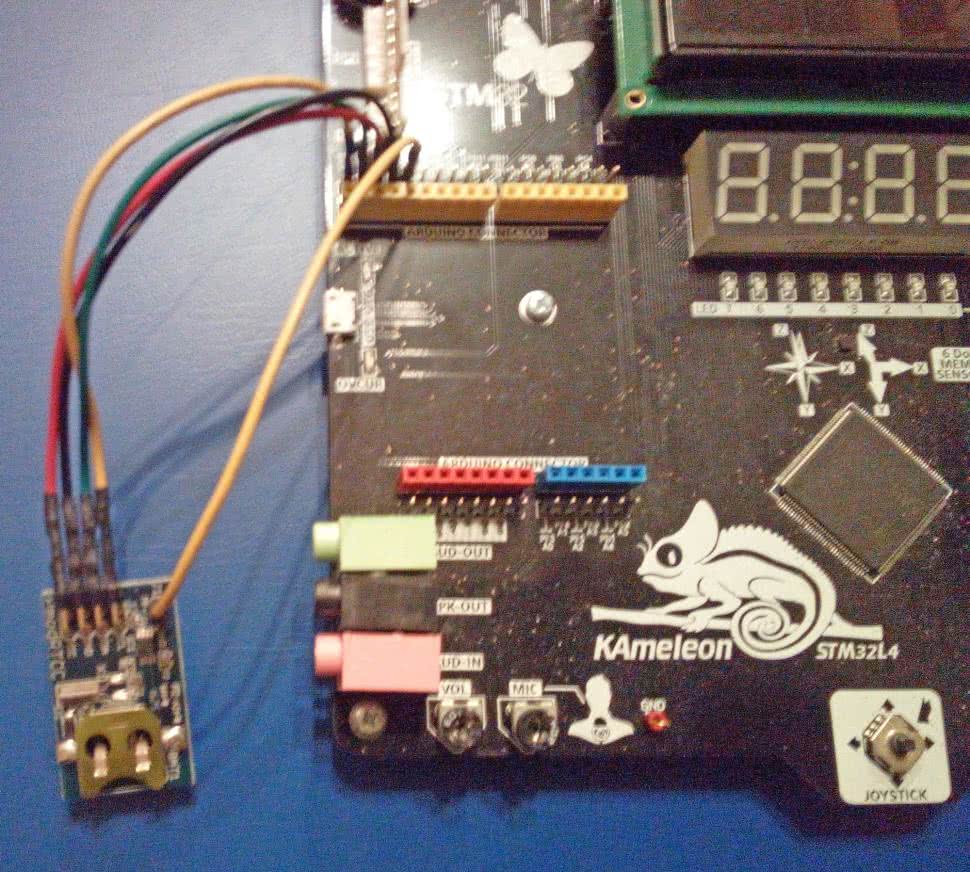
Moduł PmodRTCC ma 8-pinowe złącze dla interfejsu I2C (J2) i 2-pinowe złącze J1 zawierające piny MFP (Multi-Function Pin) oraz GND. Pin MFP może pełnić różne funkcje, zależnie od konfiguracji układu - w prezentowanym przykładzie będzie on źródłem przerwań wywołanych wystąpieniem alarmu. Sygnały modułu PmodRTCC zostały podłączone do złącza oznaczonego jako ARDUINO CONNECTOR na płytce KAmeLeon zgodnie z tabelą 4 i fotografią 4.

Za obsługę interfejsu I2C odpowiedzialne są trzy zmodyfikowane metody klasy RTCCI2C: begin, readValue i writeValue, znajdujące się w bibliotece RTCCI2C. Pierwsza z nich, przedstawiona na listingu 5, jest odpowiedzialna za konfigurację interfejsu I2C4 oraz pinu PB10 do obsługi przerwania. Przerwanie jest wykrywane na zboczu opadającym sygnału MFP w momencie wystąpienia alarmu. Dla komunikacji I2C konfigurowane są dwa piny - PF14 i PF15 oraz interfejs I2C4. Dla tego ostatniego konieczne jest podanie wartości rejestru TIMINGR, przedstawionego na rysunku 5. Jest on odpowiedzialny za generowanie odpowiednich przebiegów czasowych na liniach SDA i SCL: SCLL i SCLH definiują długość stanu niskiego i wysokiego sygnału SCL, SCLDEL oznacza opóźnienie pomiędzy ustawieniem wartości na linii danych a zboczem narastającym sygnału zegarowego, natomiast SDADEL opóźnienie pomiędzy zboczem opadającym zegara a zmianą stanu na linii danych. Pole PRESC wyznacza dzielnik sygnału zegarowego taktującego układ I2C mikrokontrolera.
PmodRTCC
void RTCCI2C::begin()
{
__HAL_RCC_I2C4_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Pin = GPIO_PIN_10;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C4;
GPIO_InitStruct.Pin = GPIO_PIN_14 | GPIO_PIN_15;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
this->i2c.Instance = I2C4;
this->i2c.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
this->i2c.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
this->i2c.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
this->i2c.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
this->i2c.Init.OwnAddress1 = 0x01;
this->i2c.Init.Timing = 0x10563046;
HAL_I2C_Init(&this->i2c);
}
Funkcje odpowiedzialne za komunikację z modułem PmodRTCC zostały przedstawione na listingu 6. Wykorzystują one blokujące wywołania HAL_I2C_Master_Transmit i HAL_I2C_Master_Receive biblioteki STM32Cube.
uint8_t RTCCI2C::readValue(uint8_t address)
{
uint8_t value = 0;
HAL_I2C_Master_Transmit(&this->i2c, RTCC_I2C_ADDR, &address, 1, 100);
HAL_I2C_Master_Receive(&this->i2c, RTCC_I2C_ADDR, &value, 1, 100);
return value;
}
void RTCCI2C::writeValue(uint8_t address, uint8_t value)
{
uint8_t data[2] = {address, value};
HAL_I2C_Master_Transmit(&this->i2c, RTCC_I2C_ADDR, data, 2, 100);
}
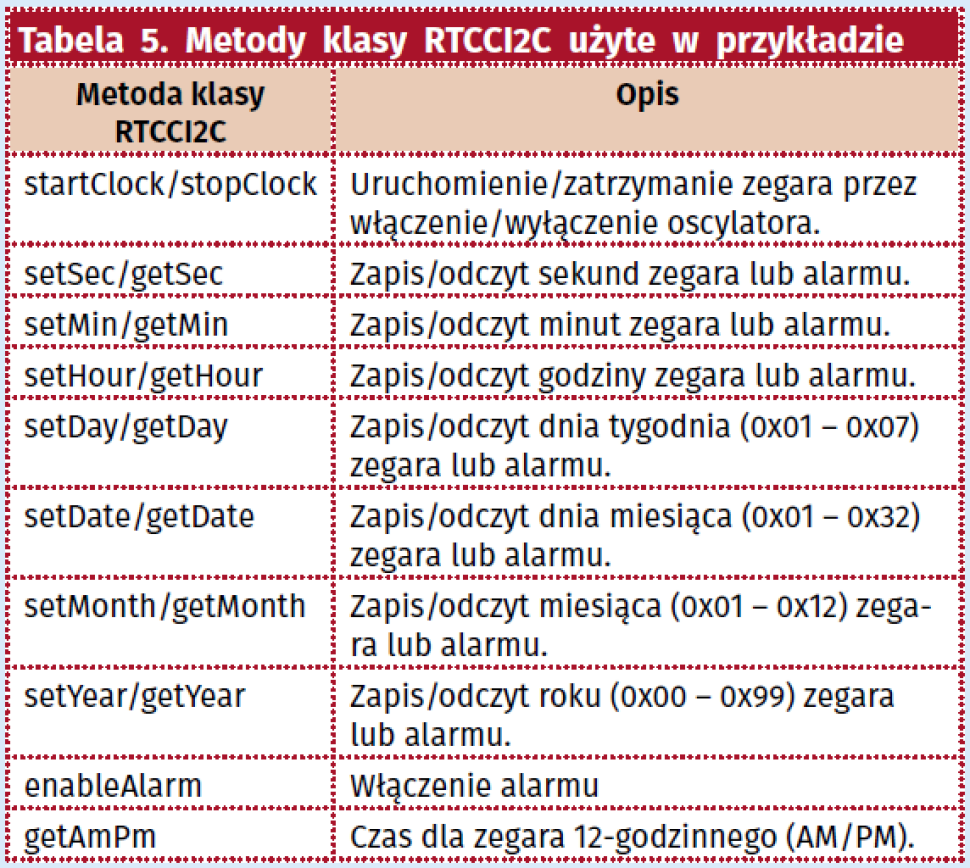
Oprócz wymienionych funkcji klasa RTCCI2C zawiera także metody konfigurujące poszczególne rejestry układu MCP79410. W tabeli 5 wymienione zostały te użyte w kodzie przykładu. Wszystkie wartości są zapisywane i odczytywane w kodzie BCD.
Funkcja main przykładowej aplikacji została przedstawiona na listingu 7. Konfiguruje ona moduł PmodRTCC i ustawia datę: niedziela, 4 marca 2018 23:15:30. Następnie ustawiany jest alarm na 10 sekund od zdefiniowanej daty. W pętli głównej co sekundę odczytywana jest data i godzina za pomocą funkcji pomocniczej printTime. Odczytane wartości są od razu wysyłane na port szeregowy LPUART1. Alarm jest sygnalizowany przez zapalenie diody LED1 podłączonej do pinu PC7. Port szeregowy LPUART1 jest konfigurowany i obsługiwany za pomocą kodu znajdującego się w pliku serial.c, natomiast sterownik diody został umieszczony w pliku led.c.
int main(void)
{
HAL_Init();
SystemClock_Config();
Serial_Config();
Led_Config();
RTCCI2C myRTCC;
myRTCC.begin();
//set the real time clock
myRTCC.stopClock();
myRTCC.setSec(RTCC_RTCC, 0x30);
myRTCC.setMin(RTCC_RTCC, 0x15);
myRTCC.setHour(RTCC_RTCC, 0x11, RTCC_PM);
myRTCC.setDay(RTCC_RTCC, 0x07);
myRTCC.setDate(RTCC_RTCC, 0x04);
myRTCC.setMonth(RTCC_RTCC, 0x03);
myRTCC.setYear(0x18);
// Set the alarm for 10 seconds after written time.
myRTCC.setSec(RTCC_ALM0, 0x40);
myRTCC.setMin(RTCC_ALM0, 0x15);
myRTCC.setHour(RTCC_ALM0, 0x11, RTCC_PM);
myRTCC.setDay(RTCC_ALM0, 0x07);
myRTCC.setDate(RTCC_ALM0, 0x04);
myRTCC.setMonth(RTCC_ALM0, 0x03);
myRTCC.enableAlarm(RTCC_ALM0, RTCC_ALMC2 | RTCC_ALMC1 | RTCC_ALMC0);
myRTCC.startClock();
while(1)
{
HAL_Delay(1000);
printTime(&myRTCC, RTCC_RTCC);
}
}
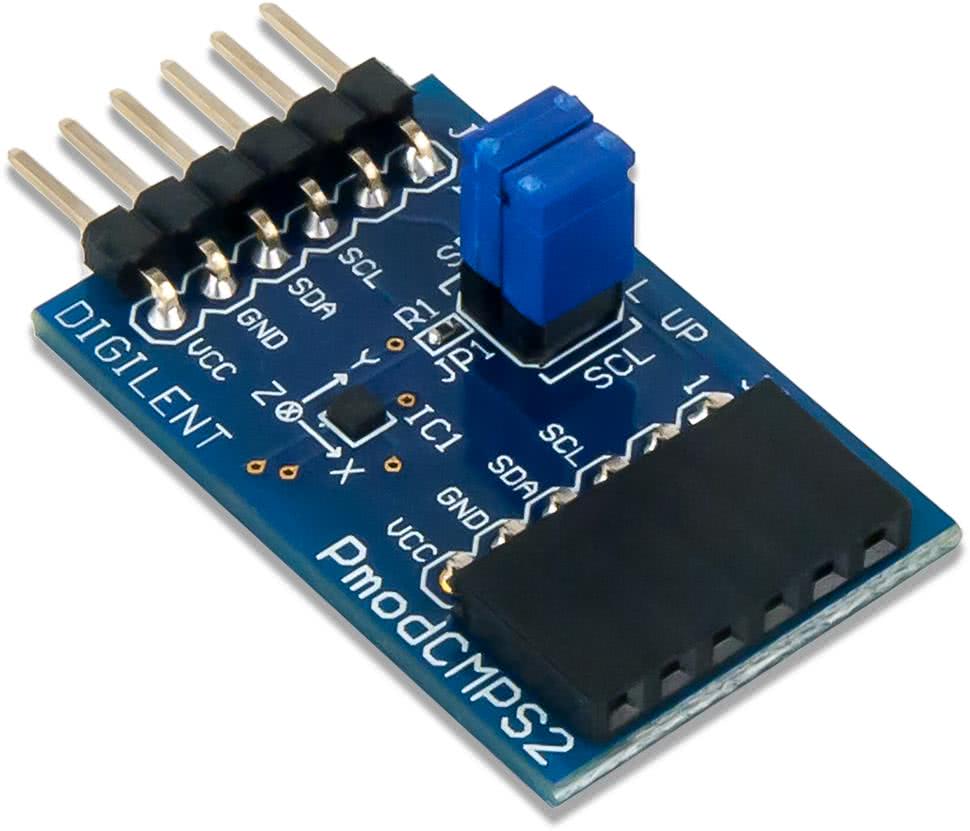
PmodCMPS2 jest ostatnim z prezentowanych w tej części cyklu modułów. PmodCMPS2 (fotografia 6) wyposażono w układ Memsic MMC34160PJ. Jest to 3-osiowy czujnik pola magnetycznego o zakresie ±16G i konfigurowanej rozdzielczości 12, 14 lub 16 bitów. Do obsługi modułu została udostępniona biblioteka przygotowana z myślą o platformie Arduino. Kod biblioteki może być pobrany bezpośrednio ze strony firmy Digilent http://bit.ly/2CI8jL4. W jej skład wchodzi pojedyncza klasa - CMPS2 służąca do konfiguracji i komunikacji z modułem PmodCMPS2. Oprócz podstawowych funkcji do odczytu pomiarów zawiera ona także metodę readHeading, umożliwiającą odczyt kierunku kompasowego, jednak ze względu na brak kompensacji pochylenia układu daje ona poprawne wyniki wyłącznie podczas pracy na płaszczyźnie XY.

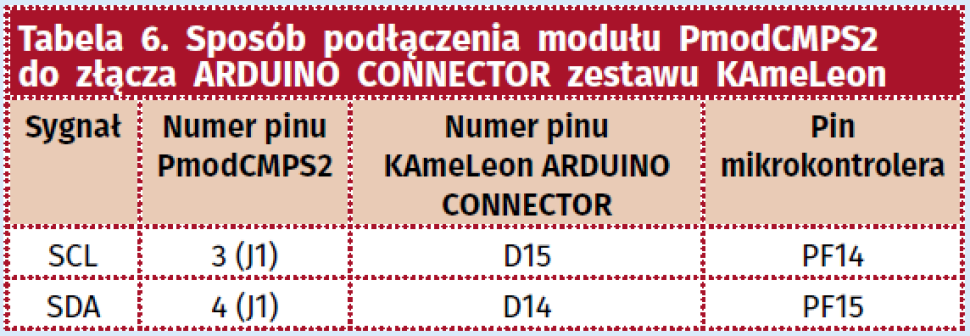
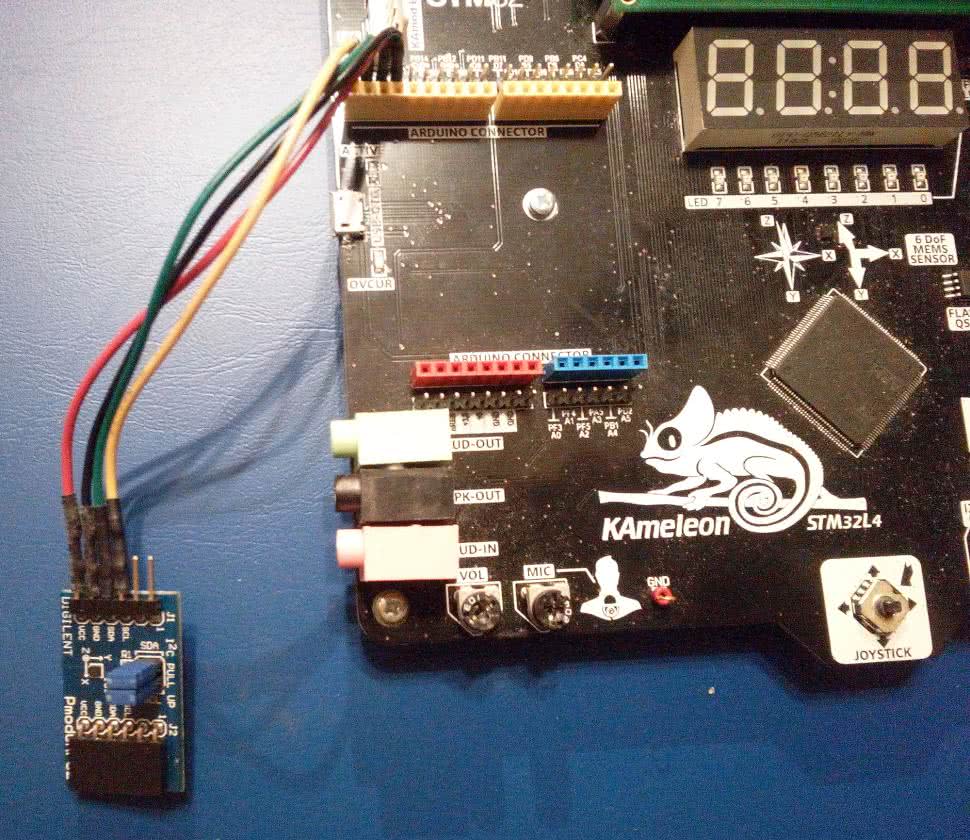
Moduł PmodCMPS2 został wyposażony w 6-pinowe złącze interfejsu I2C z dwoma nieużywanymi pinami. W przykładzie zostało ono przyłączone do magistrali I2C wyprowadzonej na złącze ARDUINO CONNECTOR na płytce KAmeLeon, tak jak na fotografii 7. Opis połączeń znajduje się w tabeli 6. Za konfigurację interfejsu I2C jest odpowiedzialna metoda init klasy CMPS2, przedstawiona na listingu 8. Została ona zmodyfikowana tak, aby mogła być użyta z mikrokontrolerem STM32L496ZGT6.
void CMPS2::init()
{
__HAL_RCC_I2C4_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C4;
GPIO_InitStruct.Pin = GPIO_PIN_14 | GPIO_PIN_15;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
this->i2cHandle.Instance = I2C4;
this->i2cHandle.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
this->i2cHandle.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
this->i2cHandle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
this->i2cHandle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
this->i2cHandle.Init.OwnAddress1 = 0x01;
this->i2cHandle.Init.Timing = 0x10563046;
HAL_I2C_Init(&this->i2cHandle);
this->writeReg(intConReg0, 0x20);
HAL_Delay(10);
this->writeReg(intConReg1, 0x00);
}
Konfiguracja I2C4 jest analogiczna do tej z poprzedniego przykładu, jednak tym razem konfigurowane są także rejestry Internal Control 0 (0x07) i Internal Control 1 (0x08) - pojedynczy pomiar z rozdzielczością 16 bitów i czasem trwania 7,92 ms.
Do komunikacji z układem MMC34160PJ wykorzystywane są funkcje readReg i writeReg przedstawione na listingu 9. Tym razem do ich realizacji użyte zostały biblioteczne funkcje HAL_I2C_Mem_Read i HAL_I2C_Mem_Write umożliwiające dostęp do określonego adresu w ramach jednego urządzenia.
uint8_t CMPS2::readReg(uint8_t addr)
{
uint8_t data;
HAL_I2C_Mem_Read(&this->i2cHandle, this->deviceID, addr, 1, &data, 1, 100);
return data;
}
void CMPS2::writeReg(uint8_t addr, uint8_t data)
{
HAL_I2C_Mem_Write(&this->i2cHandle, this->deviceID, addr, 1, &data, 1, 100);
}
Kod głównej funkcji programu widoczny jest na listingu 10. Znajduje się w nim inicjalizacja modułu PmodCMPS2 (myCMPS.init) oraz cykliczny odczyt kierunku do 10 ms (myCMPS.readHeading). Dodatkowo, jeżeli kierunek kompasowy znajduje się przedziale od 350 do 10 stopni, to zapalana jest dioda LED1 podłączona do linii PC7 i sygnalizująca wykrycie północy.
{
HAL_Init();
SystemClock_Config();
Led_Config();
CMPS2 myCMPS;
myCMPS.init();
while(1)
{
HAL_Delay(10);
int degree = myCMPS.readHeading( );
if(degree < 10 || degree > 350) Led_TurnOn(LED1);
else Led_TurnOff(LED1);
}
}
Krzysztof Chojnowski












