 Zaloguj
Zaloguj



PmodOLED
Moduł PmodOLED (fotografia 1) zawiera monochromatyczny wyświetlacz graficzny typu OLED o rozdzielczości 128×32 pikseli. Wyświetlacz jest sterowany za pomocą kontrolera SSD1306 posiadającego wewnętrzną pamięć RAM o rozmiarze 1 kB, dzięki czemu może on obsługiwać wyświetlacze o maksymalnym rozmiarze 128×64 piksele. Pamięć RAM kontrolera została podzielona na 8 stron, do których dostęp jest możliwy za pośrednictwem interfejsów SPI, I2C i równoległego z 8-bitową szyną danych.

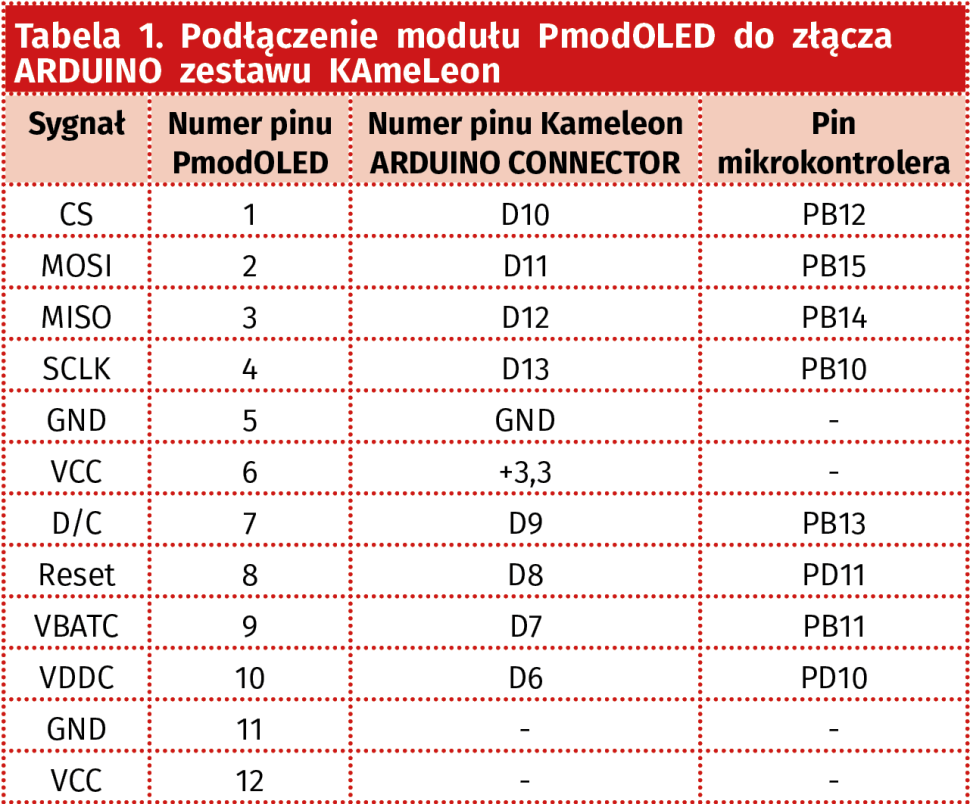
PmodOLED został wyposażony w 12-pinowe złącze SPI typu 2A zawierające oprócz sygnałów SPI, cztery sygnały sterujące pracą wyświetlacza. Ze względu na liczbę sygnałów niezbędnych do obsługi modułu nie może być on podłączony do złącza Pmod-SPI Kameleona, dlatego na potrzeby przykładu zostało wykorzystane złącze Arduino. Lista wszystkich sygnałów oraz sposób ich podłączenia do zestawu KAmeLeon znajduje się w tabeli 1.
Do obsługi wyświetlacza została wykorzystana biblioteka pobrana z oficjalnej strony modułu PmodOLED i przeznaczona dla środowiska MPIDE http://bit.ly/2xPZ7BT. Znajdujący się w niej plik sterownika (Drivers/OLED/OledDriver.cpp) został zmodyfikowany tak, aby korzystał z biblioteki STM32Cube_FW_L4 do obsługi interfejsu SPI i linii GPIO. Biblioteka została napisana w języku C++, dlatego projekt przykładu został skonfigurowany również dla tego języka.
Obsługa wyświetlacza rozpoczyna się od utworzenia obiektu klasy OledClass i wywołaniu metody OledClass::begin(). Jest ona odpowiedzialna za konfigurację interfejsów SPI i GPIO, inicjalizację wewnętrznych pól sterownika, przeprowadzenie procedury inicjalizacji wyświetlacza i wyzerowanie wewnętrznego bufora danych oraz pamięci kontrolera SSD1306. Fragment kodu, realizujący konfigurację SPI został przedstawiony na listingu 1. Ustawia on polaryzację i fazę zegara w trybie 3. (CPOL=1, CPHA=1), rozmiar danych na 8 bitów i programową kontrolę sygnału CS (NSS). Pełna procedura inicjalizacji wyświetlacza została opisana w dokumentacji modułu dostępnej na stronie: http://bit.ly/2RdpVnV.
pmodOledSpi.Instance = SPI2;
pmodOledSpi.Init.Mode = SPI_MODE_MASTER;
pmodOledSpi.Init.Direction = SPI_DIRECTION_2LINES;
pmodOledSpi.Init.DataSize = SPI_DATASIZE_8BIT;
pmodOledSpi.Init.CLKPolarity = SPI_POLARITY_HIGH;
pmodOledSpi.Init.CLKPhase = SPI_PHASE_2EDGE;
pmodOledSpi.Init.NSS = SPI_NSS_SOFT;
pmodOledSpi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_128;
pmodOledSpi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodOledSpi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodOledSpi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
pmodOledSpi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
HAL_SPI_Init(&pmodOledSpi);
Operacje rysowania i pisania są dostępne poprzez API biblioteki OLED, którego najważniejsze metody zostały wymienione w tabeli 2. Ze względu na obecność wewnętrznego bufora obrazu w bibliotece OLED, wszystkie operacje są wykonywane w pamięci mikrokontrolera, a aktualizacja wyświetlacza jest wykonywana na żądanie. Jest to optymalizacja mająca na celu ograniczenie liczby transferów SPI i umożliwienie nakładania na siebie wyświetlanych elementów.
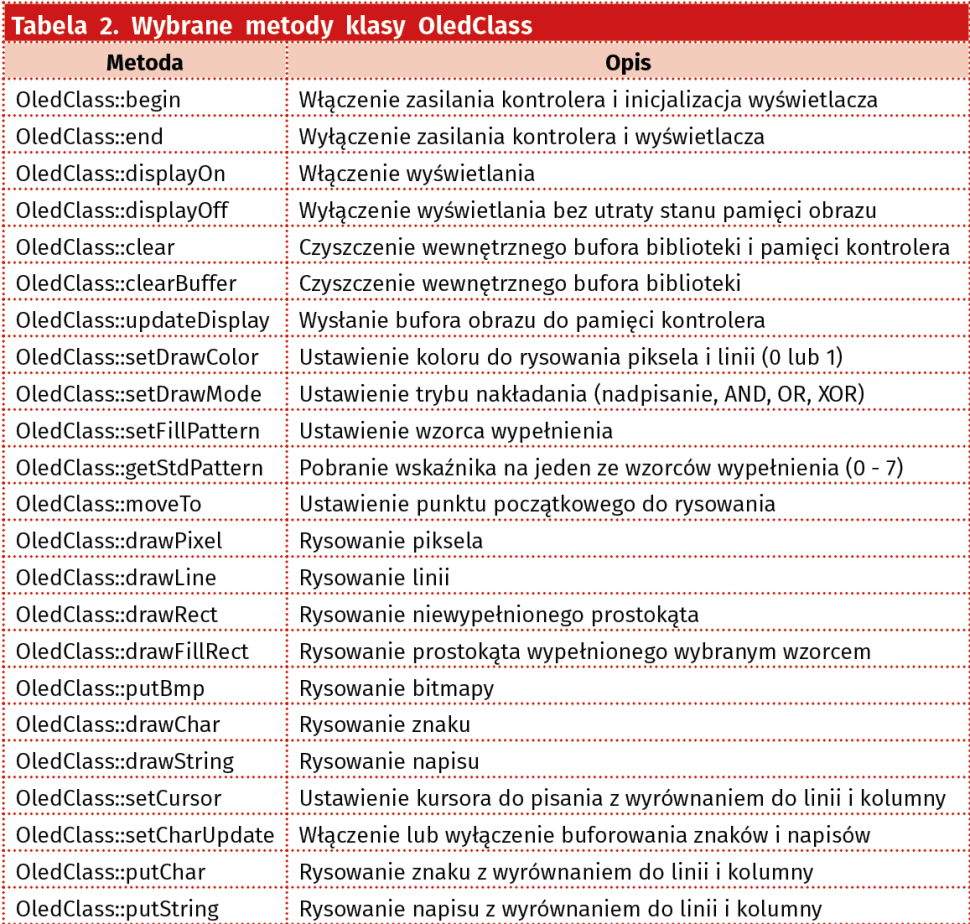
W przypadku tekstu opcja buforowania może zostać włączona lub wyłączona. W drugim przypadku napisy są wysyłane bezpośrednia do pamięci kontrolera wyświetlacza. Na uwagę zasługują także dwa tryby pisania. Pierwszy z nich (metody OledClass::drawChar i OledClass::drawString) umieszcza znaki w dowolnym miejscu wyświetlacza ustawianym metodą OledClass::moveTo. W drugim trybie, obsługiwanym przez metody OledClass::putChar i OledClass::putString, wyświetlacz jest podzielony na 4 linie i 16 kolumn, do których wyrównany jest napis. Linia i kolumna wybierana jest za pomocą metody OledClass::setCursor.
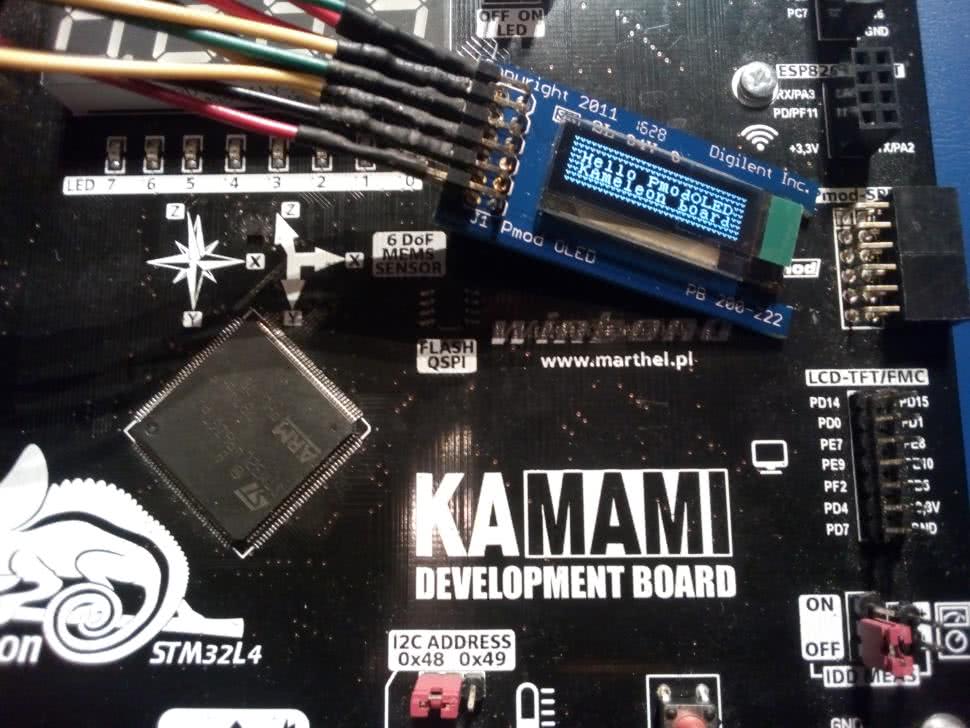
W opisywanym przykładzie wykonywana jest inicjalizacja, a następnie cały wyświetlacz jest pokrywany wybranym wzorcem. Na środku umieszczane są dwa napisy: „Hello PmodOLED” i „KAmeLeon board”. Efekt działania programu został przedstawiony na fotografii 2.
PmodGPS
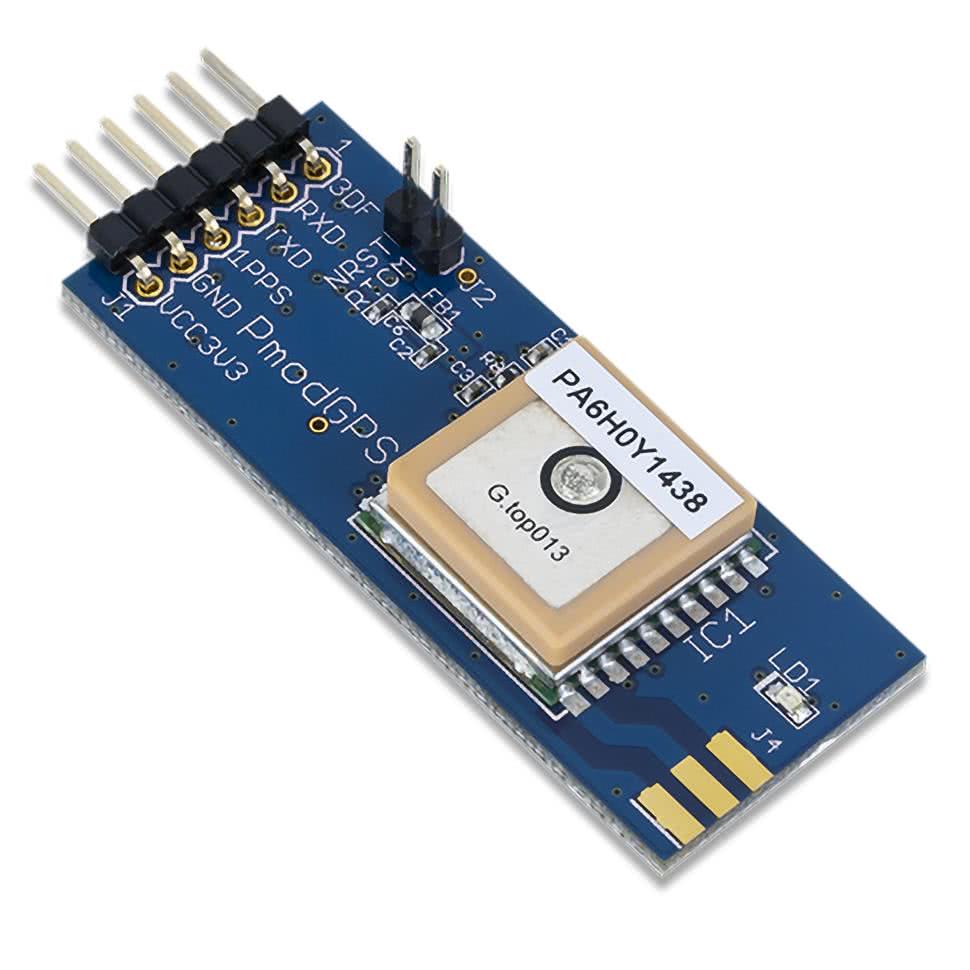
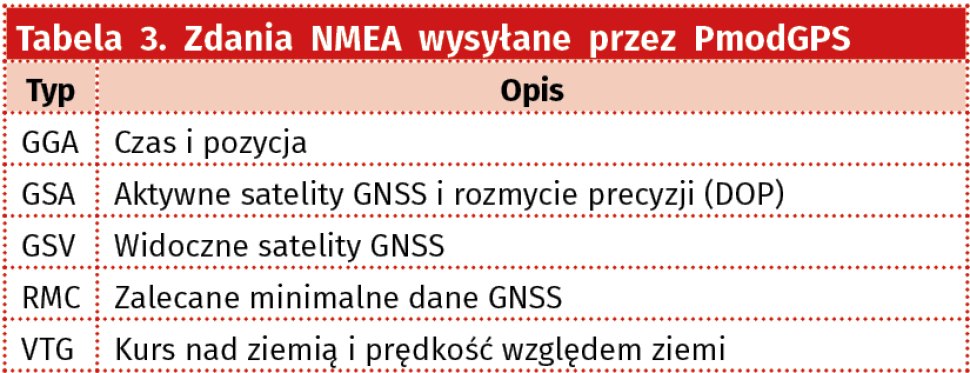
Moduł PmodGPS (fotografia 3) został wyposażony w moduł Gms-u1LP z wbudowaną anteną. Moduł ten zapewnia czułość na poziomie –165 dBm i dokładność pozycjonowania 3 m. Domyślnie moduł Gms-u1LP wysyła dane w postaci zdań zgodnych z protokołem NMEA za pośrednictwem interfejsu UART. Typy wysyłanych zdań zostały zamieszczone w tabeli 3. Dodatkowo dostępne są dwa sygnały: 3DF i 1PPS. Pierwszy z nich informuje o stanie pozycjonowania zmieniając stan co sekundę podczas ustalania pozycji i trzymając stan niski jeżeli pozycja (2D lub 3D) została ustalona. Drugi sygnał – 1PPS zapewnia synchronizację z wewnętrznym czasem uzyskanym z GPS dostarczając impulsów o długości 100 ms na początku każdej sekundy.
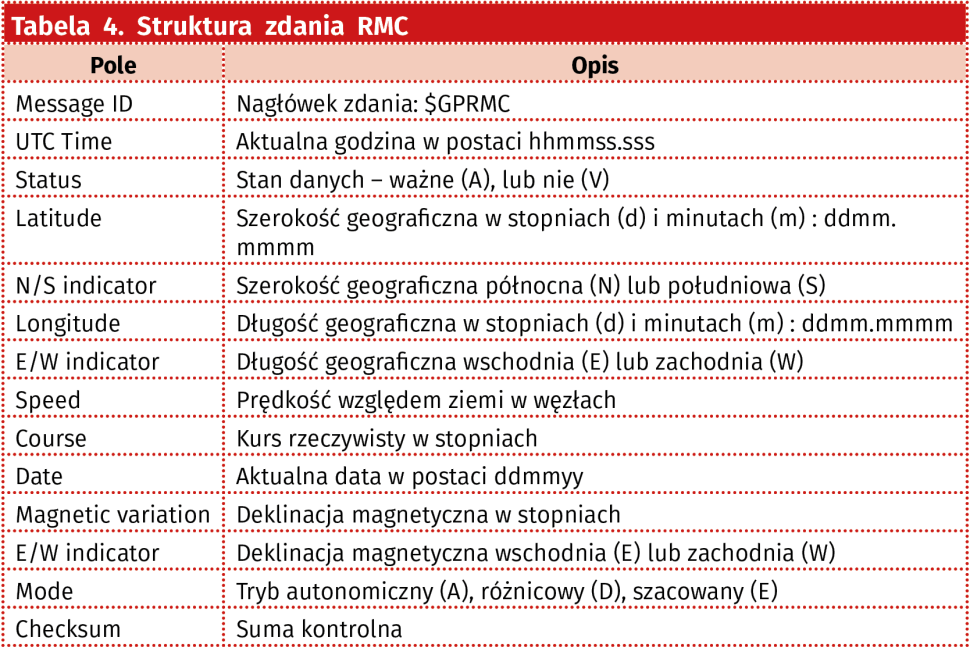
Zdania w protokole NMEA wysyłane są w postaci tekstowej. Zaczynają się od prefiksu $GP, po którym występuje typ zdania i lista wartości oddzielonych od siebie przecinkami. Najważniejszym zdaniem, z punktu widzenia danych niezbędnych do nawigacji, jest RMC (Recommended Minimum Navigation Information) zawierające takie informacje jak czas, współrzędne geograficzne, prędkość oraz kurs. Szczegółowa struktura zdania RMC została przedstawiona w tabeli 4. Opis pozostałych zdań zawierającym m.in. wysokość nad poziomem morza (GGA), widoczne satelity (GSV) można znaleźć w dokumentacji modułu PmodGPS: http://bit.ly/2QiNYQL.
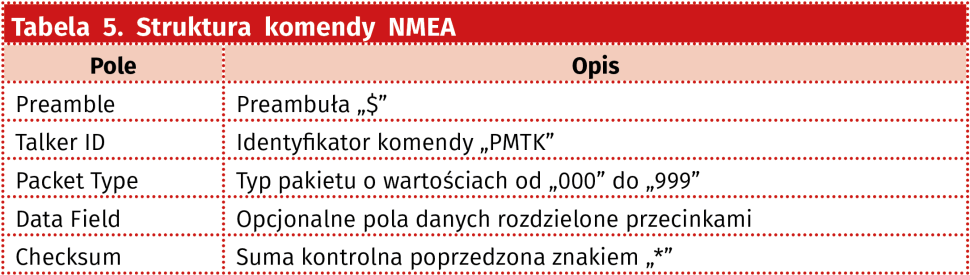
Do modułu Gms-u1LP można także wysyłać komendy NMEA konfigurujące urządzenie. Mają one określoną strukturę, przedstawioną w tabeli 5. Jedyną komendą używaną w przykładzie jest odczyt wersji firmware’u znajdującego się w module: "$PMTK605*31\r\n". W odpowiedzi na jej wysłanie, moduł PmodGPS odpowiada pakietem „$PMTK705,AXN_2.31_3339_13082100,5458,PA6H,1.0*69\r\n”, zawierającym nazwę i wersję oprogramowania (AXN_2.31_3339_13082100).
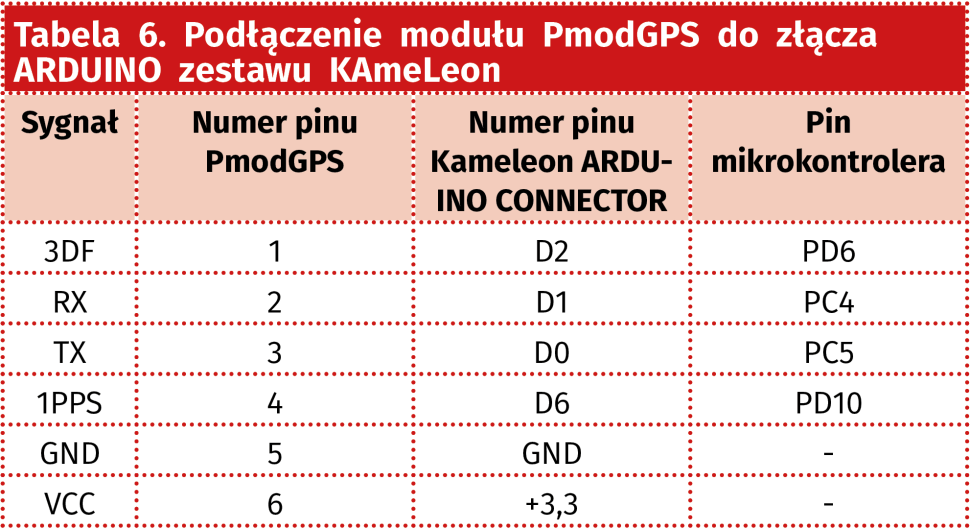
PmodGPS jest wyposażony w złącze typu UART typu 4 z pinami 3DF i 1PPS w miejsce CTS i RTS. W przykładzie, moduł został podłączony do złącza Arduino udostępniającego interfejs USART3 i linie GPIO. Lista pinów złącza J1 modułu PmodGPS i odpowiadające im piny złącza Arduino zostały przedstawione w tabeli 6.
Konfiguracja modułu PmodGPS znajduje się w dwóch funkcjach w pliku src/PmodGPS.c. Pierwsza z nich – PmodGPS_Config – przedstawiona na listingu 2, konfiguruje piny 1PPS i 3DF jako przerwania zewnętrzne oraz interfejs USART3 według domyślnych ustawień modułu (baudrate 9600, 8-bitowe dane, 1 bit stopu, brak parzystości).
void PmodGPS_Config(void)
{
// Enable clock for GPIOD port required for 3DF and 1PPS pins.
__HAL_RCC_GPIOD_CLK_ENABLE();
// Configure the interrupts on PD10 (1PPS) and PD6 (3DF). The interrupts are active on both edges
// to indicate the connection and disconnection events.
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_10;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI9_5_IRQn, 2, 0);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 1);
HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
pmodGpsUart.Instance = USART3;
pmodGpsUart.Init.BaudRate = 9600;
pmodGpsUart.Init.WordLength = UART_WORDLENGTH_8B;
pmodGpsUart.Init.StopBits = UART_STOPBITS_1;
pmodGpsUart.Init.Parity = UART_PARITY_NONE;
pmodGpsUart.Init.Mode = UART_MODE_TX_RX;
pmodGpsUart.Init.HwFlowCtl = UART_HWCONTROL_NONE;
pmodGpsUart.Init.OverSampling = UART_OVERSAMPLING_16;
pmodGpsUart.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
HAL_UART_Init(&pmodGpsUart);
}
Piny dla interfejsu UART konfigurowane są w drugiej funkcji – PmodGPS_HAL_UART_MspInit, pokazanej na listingu 3. Funkcja ta jest wywoływana podczas inicjalizacji interfejsu UART przez bibliotekę STM32Cube za pośrednictwem innej funkcji – HAL_UART_MspInit, znajdującej się w pliku main.c.
void PmodGPS_HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
// Enable the clocks for GPIO pins used by the UART3 port (PC4, PC5).
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART3;
GPIO_InitStruct.Pin = GPIO_PIN_4 | GPIO_PIN_5;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
// Enable the interrupts generated by USART3 port.
HAL_NVIC_SetPriority(USART3_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
}
Ze względu na to, że w przykładzie używane są dwa interfejsy UART, funkcja HAL_UART_MspInit decyduje o tym, który interfejs powinien być skonfigurowany. Plik src/PmodGPS.c zawiera ponadto funkcje odpowiedzialne za wymianę danych z modułem PmodGPS: PmodGPS_Write oraz PmodGPS_Read, jednak są one jedynie wrapperami na nieblokujące funkcje transmisji i odczytu danych, korzystające z przerwań: HAL_UART_Transmit_IT i HAL_UART_Receive_IT.
Odbiór danych z modułu PmodGPS odbywa się za pośrednictwem szeregu zmiennych globalnych przedstawionych na listingu 4. Do przechowywania danych używane są bufory typu DataBuffer zawierające maksymalnie po 128 bajtów danych oraz index wskazujący zajętość bufora. W przykładzie zostały użyte dwa bufory – jeden zapisywany przychodzącymi danymi, a drugi zawierający gotowy pakiet danych do przetworzenia. Indeks aktualnie zapisywanego bufora znajduje się w zmiennej currentDataBuffer, natomiast flaga informująca o zakończeniu odbioru pakietu przechowywana jest w zmiennej dataReady.
#define DATA_BUFFERS_COUNT 2
typedef struct
{
uint8_t buffer[128];
uint32_t index;
} DataBuffer;
DataBuffer dataBuffers[DATA_BUFFERS_COUNT];
uint32_t currentDataBuffer = 0;
uint8_t dataReady = 0;
Wymienione zmienne są współdzielone przez funkcje main oraz HAL_UART_RxCpltCallback, w pliku main.c. Funkcja main, po wykonaniu podstawowej inicjalizacji procesora i wyczyszczeniu buforów wysyła opisaną wcześniej komendę odczytu wersji firmware’u, po czym uruchamia asynchroniczny odczyt danych do pierwszego bufora i przechodzi w stan oczekiwania na odebranie pakietu. Odebranie pakietu jest sygnalizowane przez flagę dataReady, po otrzymaniu której cały pakiet wypisywany jest na port szeregowy. Cała procedura konfiguracji i wypisywania danych została przedstawiona na listingu 5.
int main(void)
{
HAL_Init();
SystemClock_Config();
Led_Config();
Serial_Config();
for (uint32_t i = 0; i < DATA_BUFFERS_COUNT; i++) dataBuffers[i].index = 0;
PmodGPS_Config();
PmodGPS_Write("$PMTK605*31\r\n", 13);
PmodGPS_Read(dataBuffers[0].buffer, 1);
while(1)
{
while(dataReady == 0)
__NOP();
dataReady = 0;
// The buffer before the current one contains the data received from PmodGPS.
uint32_t readyDataBuffer =
(currentDataBuffer > 0) ? (currentDataBuffer - 1) : (DATA_BUFFERS_COUNT - 1);
// Write the data from the buffer to the serial port and clear the buffer.
Serial_Write((char*)dataBuffers[readyDataBuffer].buffer, dataBuffers[readyDataBuffer].index + 1);
dataBuffers[readyDataBuffer].index = 0;
}
}
Dane z modułu PmodGPS odbierane są w przerwaniu od portu USART3, którego obsługa znajduje się na listingu 6. W pierwszej kolejności sprawdzane jest czy został odebrany cały pakiet, co jest jednoznaczne z otrzymaniem znaku nowej linii: ‘\n’. Jeżeli tak, to ustawiana jest flaga dataReady i zmieniany jest bufor do odczytu, w przeciwnym razie przesuwany jest jedynie indeks obecnego bufora. Po zakończonym odbiorze inicjalizowany jest odczyt kolejnego znaku do aktualnego bufora.
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(dataBuffers[currentDataBuffer].buffer[dataBuffers[currentDataBuffer].index] == '\n')
{
dataReady = 1;
currentDataBuffer++;
if(currentDataBuffer == DATA_BUFFERS_COUNT) currentDataBuffer = 0;
} else {
dataBuffers[currentDataBuffer].index++;
}
PmodGPS_Read(&dataBuffers[currentDataBuffer].buffer[dataBuffers[currentDataBuffer].index], 1);
}
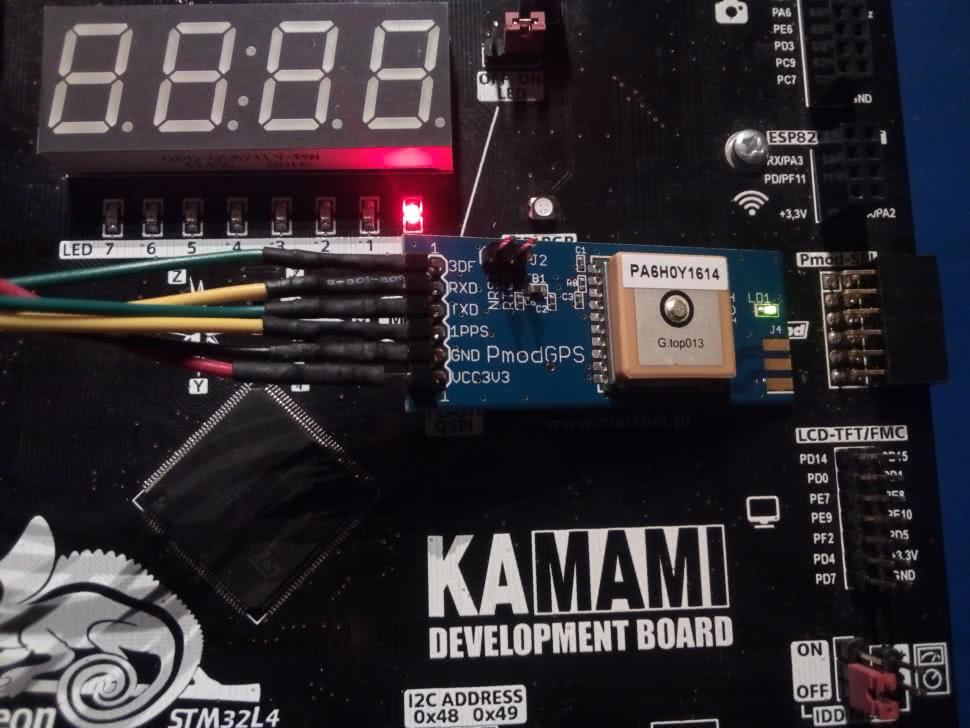
Funkcja obsługi przerwania od dwóch sygnałów modułu: 1PPS i 3DF została zaimplementowana w funkcji HAL_GPIO_EXTI_Callback – w zależności od tego, który sygnał wywołał przerwanie zmieniany jest stan jednej z diod znajdujących się na płytce KAmeLeon, dzięki czemu możliwe jest obserwowanie stanu obu linii. Moduł PmodGPS dołączony do płyty KAmeLeon został przedstawiony na fotografii 4.
Pmod8LD
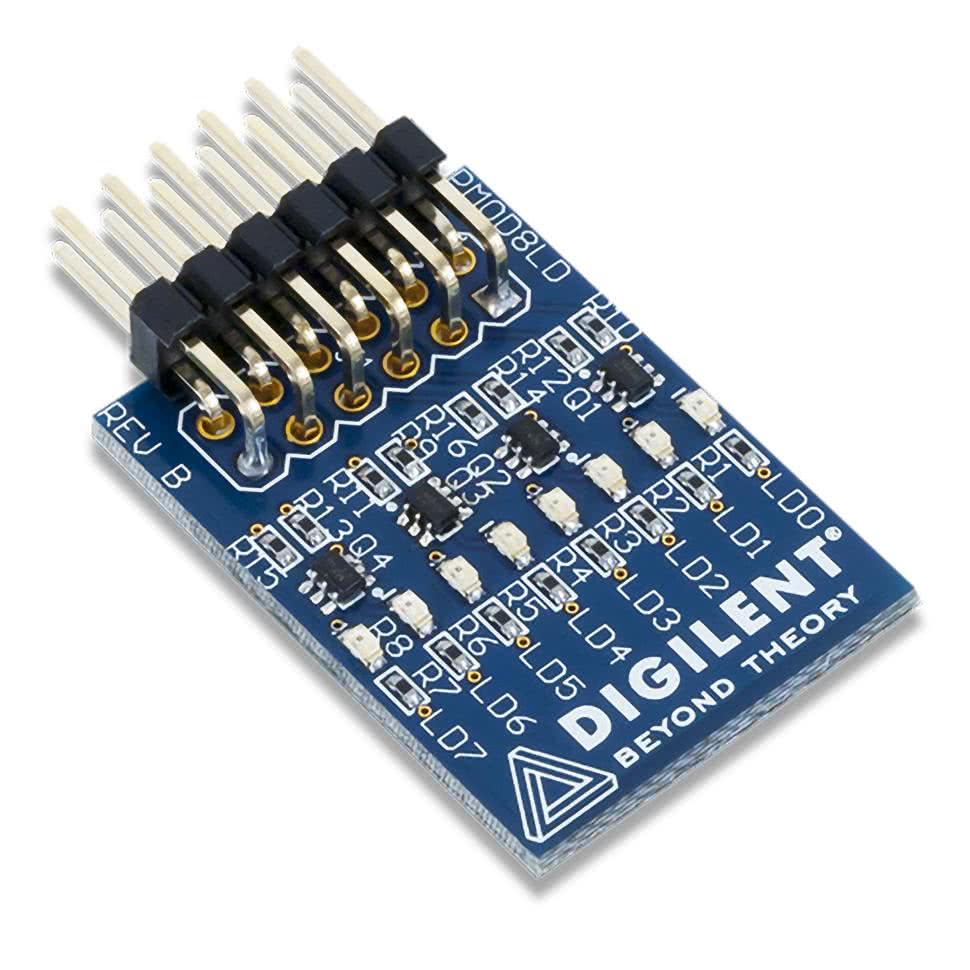
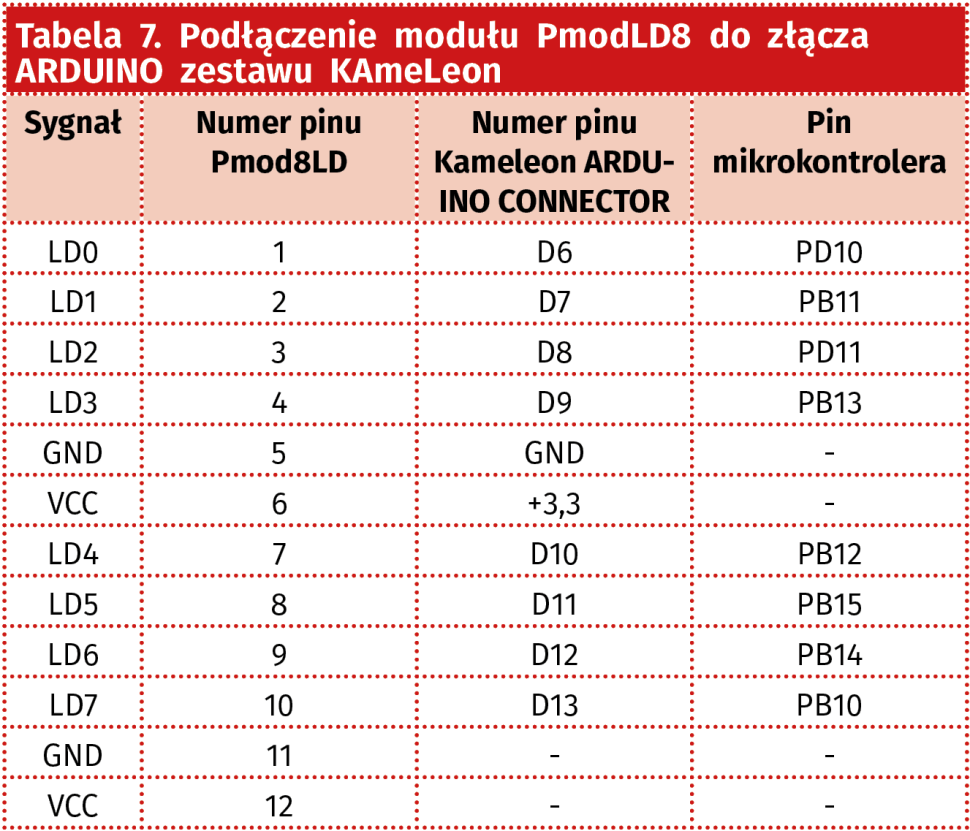
Jako ostatni zostanie przedstawiony moduł Pmod8LD (fotografia 5). Zawiera on 8 LEDów sterowanych niezależnie za pomocą linii GPIO – zapalanych stanem wysokim i gaszonych stanem niskim. Sygnały wejściowe są podłączone do bramek tranzystorów bipolarnych, dzięki czemu piny sterujące nie są obciążane prądowo, gdy diody są zapalone. Pmod8LD posiada 12-pinowy interfejs GPIO, którego sposób podłączenia do złącza Arduino zestawu KAmeLeon został przedstawiony w tabeli 7.
Obsługa modułu Pmod8LD znajduje się w plikach src/Pmod8LD.h i src/Pmod8LD.c. Pierwszy z nich zawiera enumerację Pmod8LD_Led, z listą wszystkich dostępnych LEDów oraz deklaracje funkcji do konfiguracji, włączania i wyłączania, zdefiniowanych w drugim z plików. Funkcja konfiguracyjna Pmod8LD_Config włącza zegary dla portów GPIOB oraz GPIOD, po czym ustawia wszystkie piny podłączone do modułu Pmod8LD jako wyjścia. Do ustawania stanu diody służą funkcje Pmod8LD_SetLed i Pmod8LD_ResetLed, których fragmenty przedstawione zostały na listingu 7. Wszystkie wymienione funkcje wykorzystują funkcje do obsługi GPIO znajdujące się w bibliotece STM32Cube.
void Pmod8LD_SetLed(Pmod8LD_Led led)
{
switch(led)
{
case Pmod8LD_Led0:
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_10, GPIO_PIN_SET);
break;
void Pmod8LD_ResetLed(Pmod8LD_Led led)
{
switch(led)
{
case Pmod8LD_Led0:
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_10, GPIO_PIN_RESET);
break;
Główna pętla przykładowej aplikacji wykonuje konfigurację pinów, po czym zapala i gasi kolejno wszystkie diody modułu Pmod8LD, co zostało pokazane na fotografii 6.
Krzysztof Chojnowski












