Zaloguj
Zaloguj




Moduł technologiczny TM Count 2×24 V jest montowany w obudowie DIN o szerokości 35 mm, może współpracować z wieloma rodzajami enkoderów 24 V z wyjściami pobierającymi prąd (sinking), dostarczającymi prąd (sourcing) oraz z wyjściami przeciwsobnymi (typu push-pull). Zakres zliczania w każdym kanale wynosi 32 bity, linie wejściowe wyposażono w filtry wejściowe do tłumienia zakłóceń na wejściach enkodera i wejściach cyfrowych. Mogą być one konfigurowane, podobnie jak przerwania sprzętowe.
Kanały wejściowe obsługują enkodery inkrementalne (przyrostowe), enkodery impulsowe z sygnałem kierunku, enkodery impulsowe 24 V bez sygnału kierunku oraz osobne enkodery impulsowe dla impulsów zliczanych w górę oraz w dół.
Zliczanie impulsów

Wygląd modułu technologicznego TM Count
Liczniki modułu technologicznego przechwytują impulsy i sygnały enkodera i odpowiednio je analizują. Kierunek zliczania może być określony za pomocą enkodera, sygnałów impulsowych lub programu użytkownika. Zliczanie można kontrolować przez wejścia cyfrowe. Wyjścia cyfrowe można przełączać dokładnie przy określonych wartościach licznika, niezależnie od programu użytkownika.
Reakcje liczników można określić przy użyciu funkcji opisanych poniżej.
Granice zliczania
Granice zliczania wyznaczają użyteczny zakres wartości licznika. Granice zliczania są konfigurowalne i mogą być zmieniane podczas wykonywania programu użytkownika. Możliwa maksymalna wartość graniczna zliczania wynosi 2147483647 (231-1). Minimalna wartość graniczna zliczania wynosi -2147483648 (-231). Można skonfigurować następujące reakcje licznika dla granic zliczania:
- kontynuowanie lub zatrzymanie zliczania po przekroczeniu granicy zliczania (automatyczne zablokowanie bramki),
- ustawienie wartości licznika na wartość początkową lub inną wartość graniczną zliczania po przekroczeniu aktualnej granicy zliczania.
Wartość początkowa
Wartość początkową można ustawić w zakresie wartości granicznych zliczania. Wartość początkowa może być zmieniana podczas wykonywania programu użytkownika. W zależności od konfiguracji, moduł technologiczny może ustawić aktualną wartość licznika na wartość początkową po synchronizacji, po uaktywnieniu funkcji przechwytywania (captureactivation), po przekroczeniu granic zliczania lub gdy bramka jest otwarta.
Sterowanie bramką
Otwieranie i zamykanie bramki sprzętowej i bramki programowej określa okres czasu, w którym są przechwytywane sygnały zliczania.
Sterowanie bramką sprzętową odbywa się zewnętrznie przez wejścia cyfrowe modułu technologicznego. Sterowanie bramką programową odbywa się przez program użytkownika. Bramka sprzętowa może być włączona przez parametryzację (przypisanie wartości parametru). Bramka programowa (bit w interfejsie sterowania cyklicznych danych I/O) nie może być wyłączona.
Pomiary
Dostępne są następujące funkcje pomiarowe:
- pomiar częstotliwości: średnia częstotliwość jest obliczana przy określonych przedziałach czasu pomiaru na podstawie przebiegu czasowego impulsów zliczania i zwracana w hercach w postaci liczby zmiennoprzecinkowej.
- pomiar okresu: czas trwania średniego okresu jest obliczany przy określonych przedziałach czasu pomiaru na podstawie przebiegu czasowego impulsów zliczania i zwracany w sekundach w postaci liczby zmiennoprzecinkowej,
- pomiar prędkości: średnia prędkość jest obliczana przy określonych przedziałach czasu pomiaru na podstawie przebiegu czasowego impulsów zliczania oraz innych parametrów, i zwracana w skonfigurowanej jednostce miary.
Można skonfigurować przedział czasu, w którym moduł technologiczny cyklicznie aktualizacje mierzone wartości, jako czas aktualizacji. Ustawianie dłuższych czasów aktualizacji umożliwia uśrednienie mierzonych wielkości i zwiększenie dokładności pomiaru.
Otwieranie i zamykanie bramki sprzętowej i bramki programowej określa okres czasu, w którym są przechwytywane sygnały zliczania. Czas aktualizacji jest asynchroniczny w odniesieniu do otwierania bramki, co oznacza, że czas aktualizacji nie rozpoczyna się, gdy bramka jest otwierana. Po zamknięciu bramki, ostatnia przechwycona wartość mierzona jest w dalszym ciągu zwracana.
Do sterowania dwoma wyjściami cyfrowymi kanału, można określić dwie wartości porównawcze. Jeżeli wartość mierzona spełni skonfigurowany warunek porównania, to odpowiednie wyjście cyfrowe można ustawić do inicjowania operacji sterowania bezpośrednio w procesie. Wartości porównawcze są konfigurowalne i mogą być zmieniane podczas wykonywania programu użytkownika.
Funkcje pomiarowe mają następujące wartości graniczne zakresów pomiarowych:
- pomiar częstotliwości: 0,04 Hz...800 kHz.
- pomiar okresu: 1,25 ms...25 s.
- pomiar prędkości: zależy od konfigurowanej liczby przyrostów w jednostce miary (increments per unit) oraz podstawy czasu dla pomiaru prędkości (time base for velocity measurement).
Wszystkie mierzone wartości są zwracane jako wartości ze znakiem. Znak wskazuje, czy wartość licznika zwiększyła się, czy zmniejszyła się w danym okresie czasu.
Wykrywanie pozycji do sterowania ruchem
Modułu technologicznego z enkoderem inkrementalnym można użyć do wykrywania pozycji w systemie sterowania ruchem S7-1500 Motion Control. Wykrywanie pozycji opiera się na funkcji zliczania modułu technologicznego, który analizuje przechwycone sygnały enkodera i wysyła je do systemu sterowania ruchem S7-1500 Motion Control.
W oknie programu STEP 7 (środowiska projektowego TIA Portal) do konfiguracji urządzenia modułu technologicznego, należy wybrać opcję "Position input for Motion Control" (wykrywanie pozycji do sterowania ruchem). Wybrany tryb będzie automatycznie zastosowany dla wszystkich kanałów modułu technologicznego.
Funkcje dodatkowe: przechwytywanie
Można skonfigurować zbocze zewnętrznego sygnału odniesienia, które spowoduje zapisanie aktualnej wartości licznika jako wartości przechwyconej. Funkcję przechwytywania (Capture) mogą wywołać następujące sygnały zewnętrzne:
- narastające lub opadające zbocze sygnału na wejściu cyfrowym,
- oba zbocza sygnału na wejściu cyfrowym,
- narastające zbocze sygnału N na wejściu enkodera.
Można określić, czy zliczanie w wyniku funkcji przechwytywania następuje od aktualnej wartości licznika, czy od wartości początkowej.
Funkcje dodatkowe: synchronizacja
Można skonfigurować zbocze zewnętrznego sygnału odniesienia do ładowania określonej wartości początkowej do licznika. Następujące sygnały zewnętrzne mogą wywołać synchronizację:
- narastające lub opadające zbocze sygnału na wejściu cyfrowym,
- narastające zbocze sygnału N na wejściu enkodera,
- narastające zbocze sygnału N na wejściu enkodera w zależności od poziomu sygnału na przypisanym wejściu cyfrowym.
Funkcje dodatkowe: wartości porównawcze
Do sterowania dwoma wyjściami cyfrowymi kanału, można określić dwie wartości porównawcze. Jeżeli wartość licznika spełni skonfigurowany warunek porównania, to odpowiednie wyjście cyfrowe można ustawić do inicjowania operacji sterowania bezpośrednio w procesie. Wartości porównawcze są konfigurowalne i mogą być zmieniane podczas wykonywania programu użytkownika.
Funkcje dodatkowe: histereza
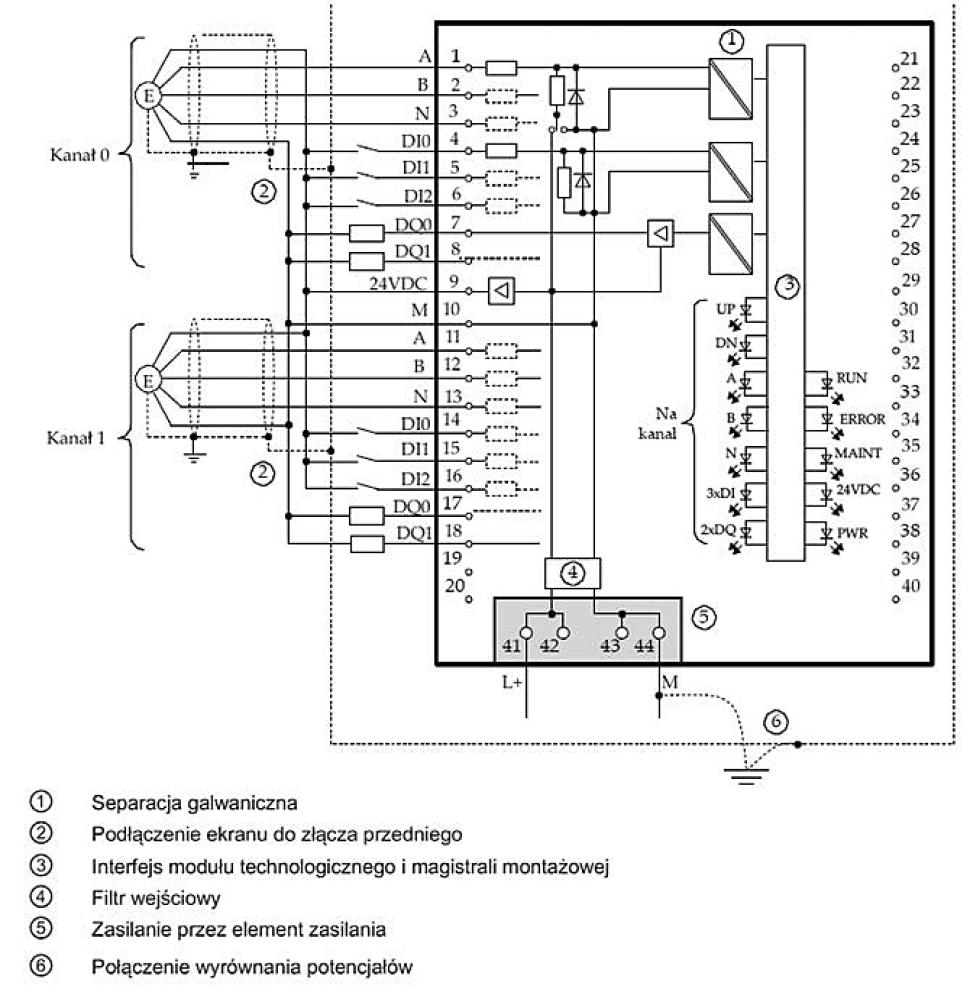
Rys. 1. Schemat blokowy połączenia modułu technologicznego z dwoma enkoderami inkrementalnymi
Dla wartości porównawczych można określić histerezę, wewnątrz której wyjście cyfrowe będzie zabezpieczone przed ponownym włączeniem. Enkoder może przejść do stanu spoczynkowego przy określonej pozycji, a niewielkie ruchy mogą powodować zmiany wartości licznika wokół tej pozycji. Jeśli wartość porównawcza lub wartość graniczna zliczania znajdują się wewnątrz zakresu tych zmian, a histereza nie jest używana, to odpowiednie wyjście cyfrowe będzie włączane i wyłączane z odpowiednią częstotliwością. Histereza zabezpiecza przed tymi niepożądanymi operacjami włączania.
Funkcje dodatkowe: przerwania sprzętowe
Moduł technologiczny może wywołać przerwanie sprzętowe w CPU, na przykład w przypadku wystąpienia zdarzenia porównania, nadmiaru lub niedomiaru, przekroczenia zera licznika, oraz lub zmiany kierunku zliczania (odwrócenia kierunku). Można określić, jakie zdarzenia mają wywołać przerwanie sprzętowe podczas pracy.
Funkcje dodatkowe: przerwanie diagnostyczne
Moduł technologiczny może wywołać przerwanie diagnostyczne, na przykład w przypadku braku napięcia zasilania lub wystąpienia błędu na wyjściu cyfrowym. W celu zapewnienia odpowiedniej diagnostyki wszystkie przerwania diagnostyczne są dostępne.
Funkcje dodatkowe: filtr wejściowy
Do tłumienia zakłóceń, można skonfigurować filtr wejściowy dla wejść enkodera 24 V oraz wejść cyfrowych.
Funkcje dodatkowe: tryb izochroniczny
Moduł technologiczny obsługuje funkcję systemową "Isochronous mode" (tryb izochroniczny). Ta funkcja systemowa umożliwia rejestrowanie wartości pozycji, wartości licznika oraz wartości mierzonych w określonym cyklu systemu. Tryb izochroniczny, cykl programu użytkownika, transmisja sygnałów wejściowych i wyjściowych, oraz przetwarzanie sygnałów w module technologicznym są zsynchronizowane.
Moduł od strony sprzętowej

Tab. 1. Reakcja modułu technologicznego na przejście CPU do trybu STOP w zależności od przypisania parametrów
Na rysunku 1 przedstawiono schemat blokowy modułu technologicznego z dwoma podłączonymi enkoderami inkrementalnymi.
Do 40-stykowego złącza przedniego modułu technologicznego są doprowadzone sygnały enkodera, cyfrowe sygnały wejściowe i wyjściowe oraz zasilanie enkodera. Ponadto, napięcie zasilania, do zasilania modułu i wyjść cyfrowych, oraz generowania napięć zasilających enkodera, jest doprowadzone do 4-pinowego złącza zasilania.
Należy uziemić ekrany kabli połączeń pomiędzy enkoderem a modułem technologicznym, przez podłączenie ekranu do złącza przedniego (przez zacisk i uchwyt ekranu) i do enkodera.
W celu zasilania enkoderów i czujników podłączonych do wejść cyfrowych, moduł technologiczny dostarcza na wyjściu 24 VDC napięcie zasilania o wartości 24 VDC względem masy M. Napięcie to jest dostarczane z zacisków zasilania L+ i M, i jest ono zabezpieczone przed zwarciami i przeciążeniami.
Sygnały enkodera 24 V są oznaczone literami A, B i N. Można podłączyć następujące typy enkoderów:
- enkoder inkrementalny z sygnałem N: Sygnały A, B i N są podłączone za pomocą odpowiednio oznakowanych zacisków. Sygnały A i B są dwoma sygnałami inkrementalnymi przesuniętymi w fazie o 90°. Sygnał N jest sygnałem znaku zera, który dostarcza jeden impuls na obrót. enkoder inkrementalny bez sygnału N: Sygnały A i B są podłączone za pomocą odpowiednio oznakowanych zacisków. Sygnały A i B są dwoma sygnałami inkrementalnymi przesuniętymi w fazie o 90°. Sygnał znaku zera N pozostaje odłączony.
- enkodery impulsowe bez sygnału kierunku: Sygnał zliczania jest podłączony do zacisku A. Kierunek zliczania jest określony za pomocą interfejsu sterowania. Sygnały enkodera B i N pozostają odłączone.
- enkodery impulsowe z sygnałem kierunku: Sygnał zliczania jest podłączony do zacisku A. Sygnał kierunku jest podłączony do zacisku B. Sygnał znaku zera pozostaje odłączony.
- enkodery impulsowe z sygnałem zliczania w górę / w dół: Sygnał zliczania w górę jest podłączony do zacisku A. Sygnał zliczania w dół jest podłączony do zacisku B. Sygnał znaku zera N pozostaje odłączony.Wejścia obu kanałów zliczania nie są od siebie odizolowane. Wejścia są odseparowane galwanicznie od magistrali montażowej.

Tab. 2. Przypisania interfejsu sterowania
Do wejść A, B i N można podłączyć następujące enkodery lub czujniki:
- z wyjściem dostarczającym prąd (sourcing output): Wejścia A, B i N są przełączane przez enkoder lub czujnik potencjałem napięcia 24 VDC.
- z wyjściem pobierającym prąd (sinking output): Wejścia A, B i N są przełączane przez enkoder lub czujnik potencjałem masy M.
- z wyjściem przeciwsobnym (typu push-pull): Wejścia A, B i N są przełączane przez enkoder lub czujnik na przemian potencjałem napięcia 24 VDC lub masy M. Przy tym typie enkodera lub czujnika jest możliwe monitorowanie pod kątem wystąpienia przerwania przewodu. Procedura wykrycia przerwania przewodu (naprzemienne przełączanie) umożliwia zmienić wartość licznika w przypadku wystąpienia błędu (przerwania przewodu), nawet bez zliczania impulsów, aż do wykrycia przerwania przewodu.
Aby tłumić zakłócenia, można skonfigurować filtr wejściowy dla wejściowych sygnałów zliczania A, B i N. Wybrana częstotliwość filtru zależy od stosunku czasu impulsu do czasu przerwy w zakresie od 40:60 do 60:40. To daje pewien ustalony czas impulsu lub przerwy. Zmiany sygnału o czasie trwania krótszym niż minimalny czas impulsu lub przerwy są tłumione.
Można określić następujące wartości częstotliwości filtru:
- 100 Hz - 4,0 ms,
- 200 Hz - 2,0 ms,
- 500 Hz - 800 µs,
- 1 kHz - 400 µs,
- 2 kHz - 200 µs,
- 5 kHz - 80 µs,
- 10 kHz - 40 µs,
- 20 kHz - 20 µs,
- 50 kHz - 8,0 µs,
- 100 kHz - 4,0 µs,
- 200 kHz (wartość domyślna) - 2,0 µs.
Dostępne są trzy wejścia cyfrowe przypadające na kanał zliczania. Wejścia cyfrowe są wykorzystywane do sterowania bramką, synchronizacji, oraz funkcji przechwytywania. Wejścia cyfrowe obu kanałów zliczania nie są od siebie odseparowane galwanicznie.
Aby tłumić zakłócenia, można skonfigurować filtr wejściowy dla wejść cyfrowych. Dla czasu reakcji filtru (filter time) można określić następujące wartości:
- brak (none),
- 0,05 ms,
- 0,1 ms (wartość domyślna),
- 0,4 ms,
- 0,8 ms,
- 1,6 ms,
- 3,2 ms,
- 12,8 ms,
- 20 ms.
Dostępne są także dwa wyjścia cyfrowe przypadające na kanał zliczania. Oba wyjścia cyfrowe DQ0 i DQ1 mogą być włączane lub przełączane bezpośrednio przez określone wartości porównawcze lub przez program użytkownika. Wyjścia cyfrowe dwóch kanałów zliczania nie są od siebie odseparowane galwanicznie. Wyjściami cyfrowymi są wyjścia dostarczające prąd, o potencjale 24 V względem masy M, i przez które może przepływać nominalny prąd obciążenia o wartości 0,5 A. Są one zabezpieczone przed przeciążeniami i zwarciami.
Konfiguracja oraz przestrzeń adresowa
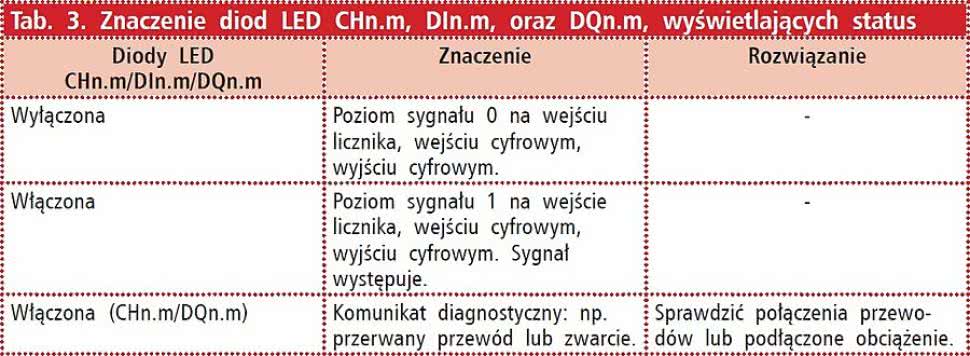
Tab. 3. Znaczenie diod LED CHn.m, DIn.m, oraz DQn.m, wyświetlających status
Parametry modułu technologicznego można konfigurować i przypisywać za pomocą oprogramowania konfiguracyjnego. Sterowanie i kontrola funkcji modułu technologicznego odbywa się za pomocą programu użytkownika.
Reakcję modułu technologicznego na przejście CPU do trybu STOP, ustawia się dla każdego kanału za pomocą parametrów podstawowych w konfiguracji urządzenia (tabela 1).
Aby wpływać na zachowanie modułu technologicznego CPU wykorzystuje się interfejs sterowania (control interface). W tabeli 2 przedstawiono przypisanie interfejsu sterowania.
Diody LED CHn.A, CHn.B, CHn.N oraz DIn.m wskazują bieżący poziom odpowiadających sygnałów. Diody LED wyjść cyfrowych DQn.m wskazują pożądany status. Diody LED UP oraz DN wskazują logiczny kierunek zliczania. Częstotliwość migania diod LED kanałów jest ograniczona do ok. 5 Hz. Jeśli występują wyższe częstotliwości, to diody LED kanałów nie będą wskazywały bieżącego statusu i będą migać z częstotliwością 5 Hz.
Przerwania
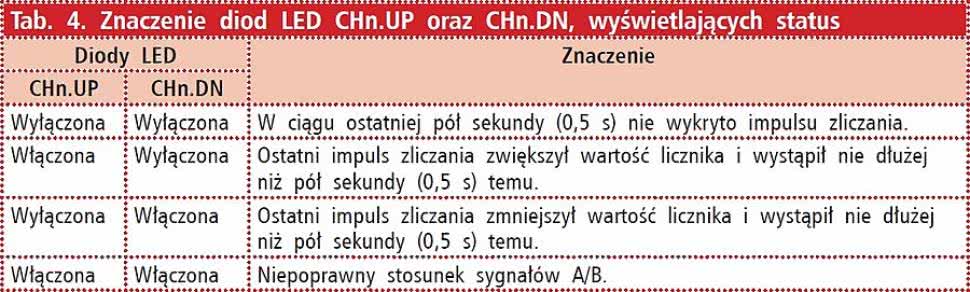
Tab. 4. Znaczenie diod LED CHn.UP oraz CHn.DN, wyświetlających status
Przerwania diagnostyczne, do zapewnienia dodatkowej diagnostyki, uaktywnia się za pomocą podstawowych parametrów podczas konfiguracji urządzenia.
Zgodnie z konfiguracją moduł technologiczny wywołuje przerwania sprzętowe wtedy, gdy występują określone zdarzenia lub stany. Gdy wystąpi przerwanie sprzętowe, to CPU przerywa wykonywanie programu użytkownika i przetwarza przypisany blok organizacyjny (OB) przerwania sprzętowego. Zdarzenie, które wywołało przerwanie, jest wprowadzane przez CPU do informacji uruchomienia przypisanego OB przerwania sprzętowego.
Kiedy wystąpi zdarzenie, które wywołuje przerwanie diagnostyczne mają miejsce następujące okoliczności:
- Dioda LED ERROR miga. Po wyeliminowaniu błędu, dioda LED ERROR gaśnie.
- CPU S7-1500 przerywa przetwarzanie programu użytkownika. Wywoływany jest blok organizacyjny OB przerwania diagnostycznego (np. OB 82). Zdarzenie, które wywołało przerwanie jest wprowadzane do informacji uruchomienia bloku organizacyjnego OB przerwania diagnostycznego.
- S7-1500 pozostaje w trybie RUN, nawet jeśli w CPU nie występuje blok organizacyjny OB przerwania diagnostycznego. Moduł technologiczny nadal działa bez zmian, o ile jest to możliwe pomimo błędu.
Szczegółowe informacje na temat zdarzenia błędu można uzyskać za pomocą instrukcji "RALRM" (odczyt dodatkowych informacji o przerwaniu).
Domyślnie dodatkowe przerwania diagnostyczne nie są uaktywnione. Dla modułu technologicznego, można skonfigurować, które zdarzenia mają wywoływać przerwania sprzętowe podczas pracy.
Aktywację przerwań sprzętowych użytkownik wykonuje w programie STEP 7 (środowiska projektowego TIA Portal) w oknie konfiguracji urządzenia modułu technologicznego wybierając "Basic parameters" (Parametry podstawowe) > "Channel" (Kanał) 1 lub 2 > "Hardware interrupts" (Przerwania sprzętowe).
Jeśli zachodzi zdarzenie, które ma wywołać przerwanie sprzętowe, a wcześniej wystąpiło już identyczne zdarzenie, które jeszcze nie zostało przetworzone, to następne przerwanie sprzętowe nie zostanie wywołane. Wtedy przerwanie sprzętowe jest utracone. W zależności od przypisania parametrów, może to prowadzić do przerwania diagnostycznego "Hardware interrupt lost" (utracone przerwanie sprzętowe).
Konfiguracja umożliwia wywoływanie przerwań sprzętowych dla wymienionych poniżej zdarzeń. Do informacji uruchomienia przypisanego bloku organizacyjnego (OB) przerwania sprzętowego jest dodawany odpowiedni numer typu zdarzenia EventType.
Andrzej Gawryluk