Zaloguj
Zaloguj



Każda posesja posiada swoje ogrodzenie a, w nim wizytówkę, którą widzi każdy odwiedzającym czyli, bramę wjazdową. Najlepiej będzie, jeśli zostanie zautomatyzowana, aby można było sterować jej zamykaniem i otwieraniem bez ruszania się z leżaka w ogrodzie.
Ponieważ brama jest urządzeniem, które może wyrządzić krzywdę człowiekowi lub uszkodzić np. samochód, więc automatyka musi być wyposażona w logikę czuwającą nad bezpieczeństwem użytkowników. Będzie nam w tym pomocna fotokomórka, której zadaniem będzie wykrywanie przeszkód znajdujących się w bramie. Dodatkowo, w celu poinformowania osób znajdujących się w pobliżu, iż skrzydła bramy się poruszają, użyjemy sygnalizatora świetlnego umieszczonego na maszcie obok bramy.
W wypadku bramy wjazdowej bezpieczeństwo jest kluczowym elementem. Warto poświęcić odrobinę czasu na przemyślenie sposobu działania naszego urządzenia. Zapobiegnie to wielokrotnemu przerabianiu schematu aplikacji oraz unikniemy błędów, które w wypadku bramy mogłyby skutkować np. uszkodzeniem pojazdu.
W naszym wypadku za bezpieczeństwo będzie odpowiedzialna jedna fotokomórka, której rolę może pełnić np. moduł AVT–1510 będący barierą optyczną pracującą z użyciem światła laserowego. Jeśli chcemy zastosować bardziej zaawansowane układy bezpieczeństwa, powinniśmy zastosować kilka fotokomórek lub gdy mamy bramę odsuwaną na bok, możemy zastosować czujniki ruchu albo elementy monitoringu wideo wraz z urządzeniem posiadającym funkcjonalność detekcji ruchu w wybranym obszarze. Przy bardziej zaawansowanych systemach bezpieczeństwa stosuje się także listwy naciskowe zamontowane na krawędzi skrzydeł lub monitoring wielkości obciążenia, poprzez pomiar prądu pobieranego przez silniki. Nasza uproszczona wersja ochrony z użyciem fotokomórki będzie informowała nas o tym, czy w przejściu(w bramie) nie znajduje się żadna przeszkoda. Ten sposób prowadzenia ochrony ma oczywiste wady gdyż, nie wykrywa przeszkód poniżej ani powyżej bariery, nie wykryje nikogo stojącego pomiędzy otwartymi skrzydłami bramy. W przypadku bariery laserowej można się posiłkować siatką luster, dzięki którym nasza bariera może obejmować większy obszar. Jednakże naszym założeniem jest wykrywanie pojazdów w bramie a, do tego ten układ w zupełności wystarczy. Często stosowane są także dodatkowe bariery optyczne jeszcze przed bramą. Pozwala to zauważyć pojazd stojący blisko bramy na terenie posesji. Chodzi o sytuację, gdy brama ma zostać otwarta, ale pojazd znajduje się zbyt blisko i jest widoczny właśnie w tej dodatkowej fotokomórce. Wówczas automatyka powinna uniemożliwić otwarcie bramy gdyż, grozi to uszkodzeniem pojazdu.
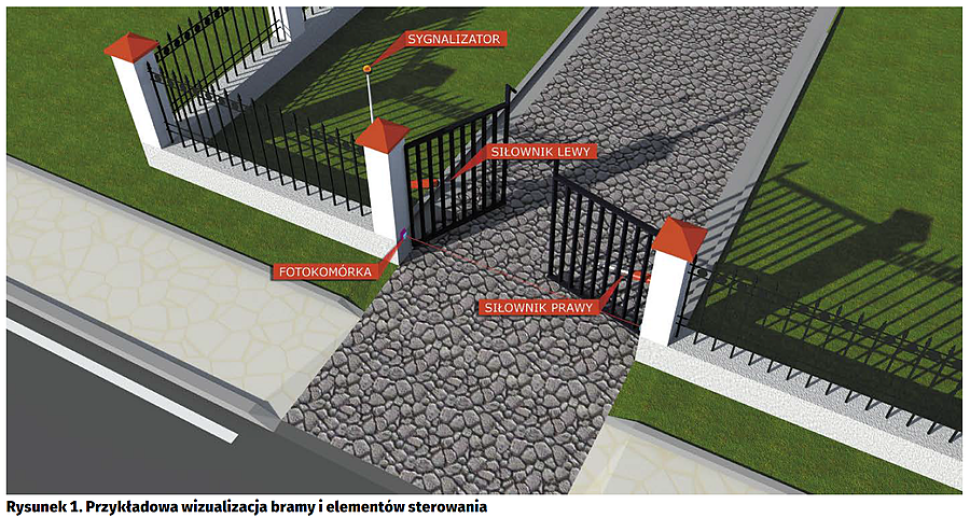
Na rysunku 1 widzimy przykładową wizualizację podjazdu na posesję wraz z bramą wjazdową. W skład automatyki wchodzą takie elementy jak: sygnalizator świetlny, dwa siłowniki z czujnikami krańcowego położenia oraz fotokomórka. Zakładamy, że konstrukcja bramy wymusza na naszej automatyce określoną sekwencję ruchu skrzydeł podczas jej otwierania oraz w końcowej fazie zamykania. Zatem automatyka będzie musiała poruszać skrzydłami bardziej inteligentnie niż roletami, które opisane zostały w poprzednim artykule. Podczas otwierania najpierw ruszy lewe skrzydło a po chwili prawe. Podczas zamykania odwrotnie, najpierw ruszy prawe skrzydło a po chwili lewe. Fotokomórka natomiast będzie odpowiadała za wymuszenie otwarcia bramy w sytuacji gdy przeszkoda przesłoni wiązkę laserową. W celu zwiększenia bezpieczeństwa użytkowania, każdy ruch bramy ma zostać poprzedzony kilkoma błyśnięciami sygnalizatora świetlnego. Zobaczmy zatem, jak zrealizować sterowanie bramą wjazdową z użyciem sterownika Siemens LOGO! 8.
Do sterowania ruchem zostały przewidziane wejścia I1, NI1, NI2 oraz NI3. Z opisu wejść wiemy, że I1 to wejście fizyczne znajdujące się na CPU – użyjemy go do sterowania z przycisku fizycznego – natomiast, wejścia oznaczone literą N to wirtualne wejścia sieciowe, których użyjemy w przyszłości do sterowania z innych modułów. Wejścia I1 oraz NI1 pełnią identyczną funkcję i służą do sterowania bramą, czyli zamykania i otwierania. Wejścia NI2 oraz NI3 posłużą nam do wymuszania konkretnego polecenia dla bramy. Możemy do tego celu użyć innej jednostki LOGO! 8 pracującej w tej samej sieci, która użyje wirtualnych wejść naszego CPU sterującego bramą. Wejścia I2,I3 służą do podłączenia styków krańcówek siłownika lewego skrzydła. Analogicznie, wejścia I4,I5 służą do podłączenia styków krańcówek prawego siłownika. Wejście I6 posłuży nam do dołączenia sygnału z fotokomórki. W tym przypadku fotokomórka musi stanem wysokim(podaniem napięcia na wejście I6) sygnalizować przeszkodę, czyli przesłonięcie wiązki światła.
Wyjścia Q1,Q2 i Q3 służą do sterowania pracą dwóch siłowników. Wyjście Q1 odpowiada za ustalenie kierunku ruchu. W typowym wypadku można to zadanie zrealizować na przekaźnikach zmieniających polaryzację podłączonych silników. W bardziej zaawansowanej wersji można zastosować mostki półprzewodnikowe do sterowania silnikami. Wyjścia Q2 i Q3 odpowiadają za podanie zasilania odpowiednio dla lewego i prawego siłownika. Zasilanie sygnalizatora optycznego włączane jest z wyjścia Q4. Dodatkowo zaprojektowane są wyjścia wirtualne. NQ1 sygnalizuje pełne otwarcie bramy, NQ2 sygnalizuje pełne zamknięcie bramy, NQ3 sygnalizuje, iż aktualnie przynajmniej jedno skrzydło bramy jest w ruchu. Poznajmy zatem funkcje, które pełnią kolejne bloki w przedstawionym rozwiązaniu:
Blok 1 po otrzymaniu impulsu z B001 i bazując na informacji od B027 oraz fotokomórki, podejmuje decyzję o tym, otwarciu lub zamknięciu bramy. Podjęta decyzja jest wysyłana do bloku 5 gdzie następuje przygotowanie rozkazu do realizacji, a także do bloku 2, który jest pamięcią przyjętych poleceń do realizacji.
Blok 2 zawiera pamięć przechowująca informację o tym, że zostało wydane polecenie do realizacji. Jest kasowana po zakończeniu realizacji polecenia.
Blok 3 stanowi układ bezpieczeństwa, wymuszający otwarcie bramy jeśli była w trakcie zamykania i nadszedł sygnał z fotokomórki o pojawieniu się przeszkody.
Blok 4 to układ czasowy służący do automatycznego zamykania w pełni otwartej bramy.
Blok 5 odpowiada za przygotowanie rozkazu do realizacji.
Blok 6 to układ opóźniający start ruchu bramy, aby dać czas sygnalizatorowi optycznemu na poinformowanie osób w otoczeniu bramy.
Blok 7 jest układem realizującym prawidłową sekwencję ruchu skrzydeł bramy w odpowiedzi na przygotowane sygnały z bloku 5.
Blok 8 stanowi układ zatrzymujący właściwy siłownik na podstawie informacji o kierunku ruchu oraz sygnałów z krańcówek.
Blok 9 zawiera obwody czasowe sygnalizatora świetlnego generujące różne sekwencje błysków zależnie od aktualnego stanu układu automatyki. Częste błyski generuje podczas ruchu siłowników. Rzadkie błyski generuje podczas odliczania czasu do automatycznego zamknięcia.
Blok 10 jest układem przygotowującym informacje o pełnym otwarciu i pełnym zamknięciu bramy.
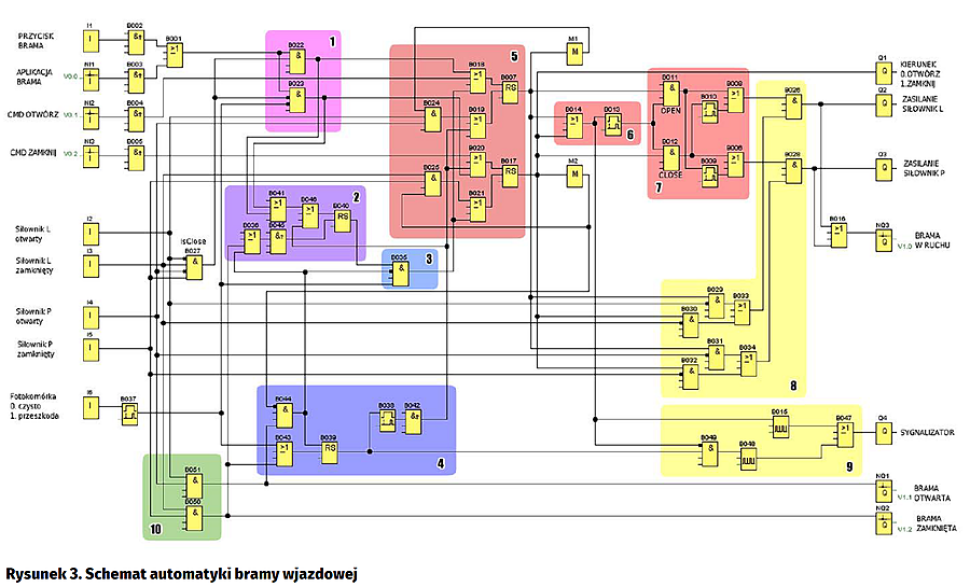
Blok B038 odpowiada za opóźnienie automatycznego zamknięcia bramy. Można ustawić np. 10 sekund. Blok B013 odpowiada za czas, jaki upłynie od wydania polecenia do chwili uruchomienia pierwszego siłownika. W tym czasie sygnalizator optyczny będzie migał, informując osoby w otoczeniu o tym, że za chwilę rozpocznie się ruch bramy. Blok B009 i B010 odpowiadają za prawidłowe opóźnienia odpowiednio podczas otwierania i zamykania bramy. Ustawienie obu wartości na taki sam czas, około 5 sekund, będzie w wielu przypadkach wystarczające. Niemniej należy te czasy ustawić odpowiednio do potrzeb. Za pracę sygnalizatora świetlnego są odpowiedzialne dwa generatory. B015 umożliwia ustawienie wzoru błysków podczas ruchu skrzydeł bramy natomiast, B049 umożliwia ustawienie wzoru błysków, które są emitowane podczas odliczania czasu do automatycznego zamknięcia bramy.
Przedstawiony układ można także rozbudować o sterowanie oświetleniem podjazdu przy współpracy z czujnikiem zmierzchowym albo o układ czasowego blokowania bramy w godzinach nocnych lub wymuszenie pełnego jej otwarcia w zadany dzień. Jest to możliwe dzięki wbudowanemu zegarowi czasu rzeczywistego, o którym napiszę już niebawem.
Jak widać, LOGO! 8 jest w stanie sprostać także takiemu zadaniu jak sterowanie dwuskrzydłową bramą z wymuszoną sekwencją otwierania i zamykania. Dodatkowo projekt już jest wyposażony na przyszłość w możliwość połączenia się z innymi modułami celem zintegrowania sterowania. Widać przez to wyraźnie, że Siemens LOGO! 8 to sterownik, który pozwala na pisanie programów z myślą o przyszłości. Już dzisiaj można tworzyć urządzenia, które w przyszłości będą ułatwiały integrację z kolejnymi rozwiązaniami.
Warto również pamiętać o aplikacji mobilnej przygotowanej przez firmę Siemens, którą już teraz można będzie użyć do sterowania bramą. Czym jeszcze może w naszym domu sterować LOGO! 8? Co może więcej zrobić dla ułatwienia nam życia? O tym już w kolejnym artykule.
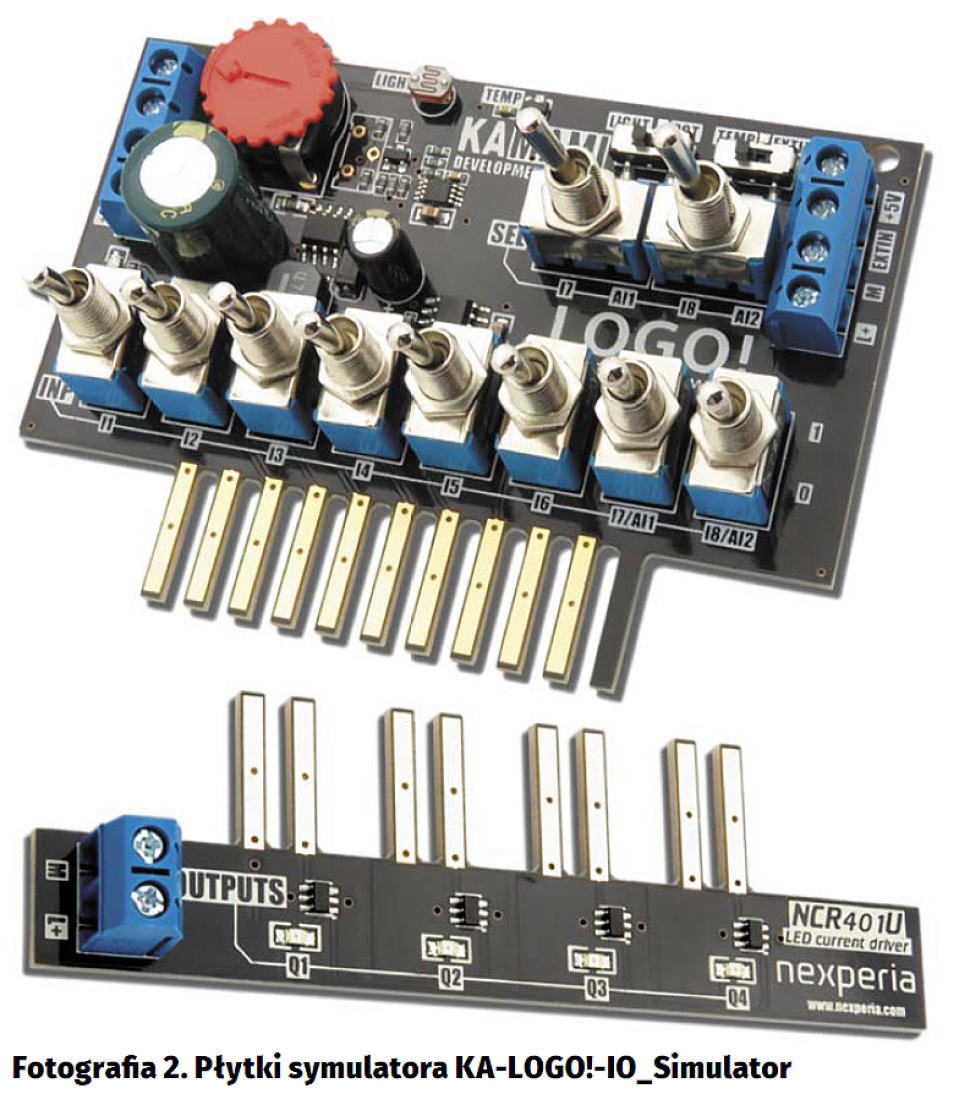
Arkadiusz Wernicki