 Zaloguj
Zaloguj




Napędy miniaturowe i mikronapędy mogą tworzyć niezawodny układ napędowy wyłącznie w połączeniu z odpowiednim kontrolerem ruchu. Mając to na uwadze, specjalizująca się w produkcji napędów firma FAULHABER uzupełnia swoją bogatą ofertę silników o szeroką gamę kontrolerów ruchu, przygotowanych do różnorodnych zastosowań, pracujących z zasilaniem o różnych parametrach oraz zaprojektowanych w wersji z obudową lub bez.
Kompaktowy kontroler MC 3603
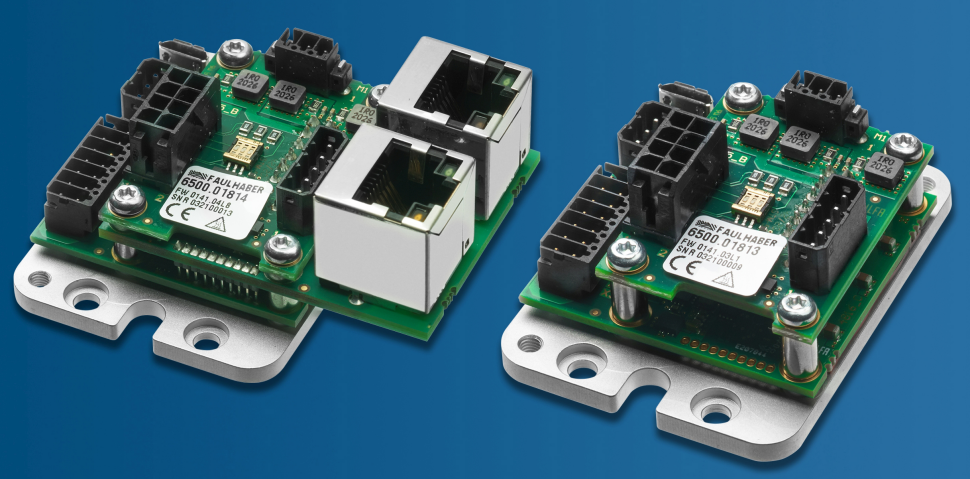
Kontrolery ruchu bez obudowy zostały uzupełnione o nowy model: MC 3603 (fotografia 1), który dzięki kompaktowej budowie idealnie sprawdzi się w produkcji sprzętu i zastosowaniach związanych z technologią medyczną. Dzięki zasilaniu 36 V oraz wydajności prądowej do 3 A (wartość szczytowa prądu 9 A) nowy kontroler ruchu obejmuje średni zakres mocy do ok. 100 W. Nadaje się do szczotkowych silników z enkoderem, napędów bezszczotkowych oraz silników liniowych. Opcje wejść/wyjść i interfejsy enkodera są takie same jak w pozostałych produktach z tej rodziny. Dostępne są interfejsy USB, RS232, CANopen i EtherCAT. Kontroler ruchu jest już wyposażony w nową wersję oprogramowania "M". Aby zapewnić użytkownikom możliwość prostej i wygodnej konfiguracji systemu, dostępna jest najnowsza aktualizacja (wersja 6.9) oprogramowania FAULHABER Motion Manager.
Kompatybilność elektromagnetyczna wszystkich kontrolerów ruchu
Wraz z wprowadzeniem nowego modelu MC 3603, kontrolery ruchu obejmują teraz cały zakres zastosowań typowy dla silników miniaturowych i mikrosilników, począwszy od modelu MC 3001 o wielkości znaczka pocztowego i parametrach 30 W / 1 A (prąd szczytowy 2 A), aż do największego w serii modelu MC 5010 o natężeniu 10 A (prąd szczytowy 30 A) przeznaczonego do montażu w szafach rozdzielczych i z powodzeniem stosowanego głównie w sektorze przemysłowym.
Wszystkie kontrolery ruchu zostały przebadane i spełniają wymagania aktualnych przepisów dotyczących kompatybilności elektromagnetycznej. Nie tylko urządzenia zostały odpowiednio zoptymalizowane, ale także dokumentacja została dostosowana tak, aby zapewnić użytkownikom jak najlepsze wsparcie (rysunek 1). Więcej informacji na temat kompatybilności elektromagnetycznej można znaleźć na stronie: www.faulhaber.com/en/motion/faulhaber-publishes-specialist-book/
EMC dla miniaturowych napędów
Kompatybilność elektromagnetyczna (EMC) opisuje zdolność elementów elektrycznych i elektronicznych do współdziałania bez wzajemnych zakłóceń w określonym środowisku. Konstruktorzy muszą o tym pamiętać podczas pracy z napędami sterowanymi, ale zagadnienie jest bardzo złożone i często sprawia trudność.
W latach 20. XX wieku to konflikt między już ustaloną technologią napędu elektrycznego w ruchu miejskim a powstającym sektorem telekomunikacyjnym doprowadził do rozwoju tłumienia zakłóceń radiowych, koncepcji związanej z EMC. Obecnie napędy elektryczne są sterowane za pomocą układów elektronicznych. Oprócz konwersji energii zawierają one również komponenty telekomunikacyjne wymagane przez czujniki do transmisji danych. Ze względu na zakłócenia emitowane podczas zamiany energii ważne jest zapewnienie niezbędnej odporności na zakłócenia na małych przestrzeniach.
Podczas gdy dyrektywa EMC 2014/30/UE dotyczy urządzeń na jednolitym rynku europejskim, konkretna ewaluacja jest wykonywana na bazie tzw. normy zharmonizowanej. Wymagana jest zgodność z dyrektywą EMC wskazaną przez oznaczenie CE. Jednak urządzenia, które nie są wprowadzane na jednolity rynek europejski lub które są przeznaczone do ponownego użytku przemysłowego, również często wymagają dowodu zgodności. W tym przypadku stosuje się normy ogólne EN 61000-4-x i EN 61000-6-x - to, które mają zastosowanie, zależy od tego, czy urządzenia są przeznaczone do użytku przemysłowego, czy do sektora konsumenckiego.
Wartości graniczne dla sterowanych napędów norma EN 61800-3 służy jako podstawa do oceny gotowego do pracy napędu składającego się z silnika i falownika lub sterownika ruchu, zasilanych bezpośrednio z sieci elektrycznej. Definiuje również zasady konfiguracji pomiarów. Do rodzajów zakłóceń odnoszą się tu różne ilościowe określenia: w zakresie częstotliwości od 150 kHz do 30 MHz są one definiowane jako napięcie zakłócające w dB(μV), w zakresie częstotliwości od 30 MHz do 300 MHz jako moc zakłóceń w dB(pW) oraz w zakresie od 30 MHz do 6 GHz jako natężenie pola interferencyjnego w dB(μV/m).
Podejście to zakłada, że wielkości przemienne o niskiej częstotliwości są obserwowane przede wszystkim jako napięcie zakłócające nałożone na zasilanie. Pulsujące prądy sterowanego napędu mogą wówczas wpływać np. na działanie sterownika PLC podłączonego równolegle. Podobnie, skok napięcia na zasilaniu podczas operacji hamowania może spowodować, że urządzenia połączone równolegle zainicjują wyłączenie ochronne. Z drugiej strony moc interferencji i natężenie pola interferencyjnego opisują bezprzewodową propagację pól elektromagnetycznych.
Siła pola interferencyjnego jako wyzwanie Podczas certyfikacji urządzenia ze zintegrowanym miniaturowym napędem często większym wyzwaniem jest natężenie pola interferencyjnego. Środki, które mogą temu przeciwdziałać, to np. filtry na wyjściach mocy do tłumienia prądów zakłócających o wysokiej częstotliwości. Każda linia zasilająca silnik musi być zwykle w pełni ekranowana. To samo dotyczy kabla czujnika, który jest ułożony oddzielnie od linii zasilania silnika. Ważne jest również, aby wszystkie części przewodzące były połączone z tzw. uziemieniem funkcjonalnym za pomocą złączy ekranujących RF.
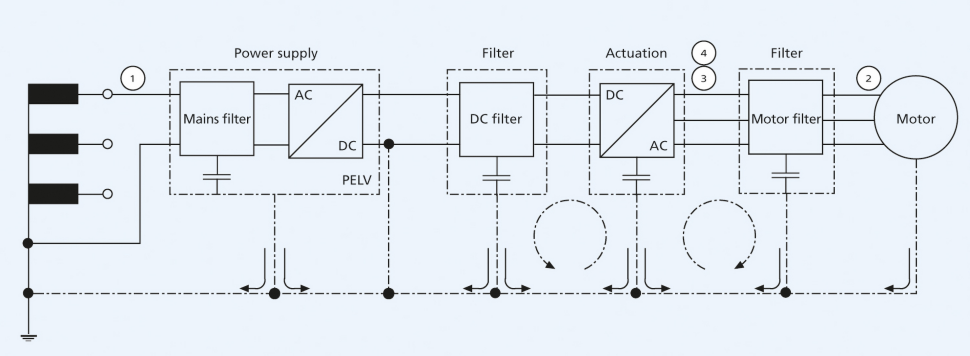
Opierając się na tym funkcjonalnym uziemieniu, oba końce ekranu można następnie połączyć płasko. Uziemienie ochronne z czystego PE jest wystarczające tylko w bardzo niewielkiej liczbie przypadków. Podczas gdy natężenie pola interferencyjnego jest skutecznie tłumione przez uziemienie funkcjonalne i kable ekranowane, w rezultacie powracająca składowa prądu przemiennego w płycie podstawy ma tendencję do wzrostu. Jeżeli te prądy przemienne płyną z powrotem do przekształtnika przełączającego przez sieć lub zasilacz, składowa napięcia przemiennego na przewodzie zasilającym nieuchronnie wzrasta, a tym samym wzrasta również napięcie zakłócające. Dlatego często potrzebny jest dodatkowy filtr w linii zasilającej, który ogranicza propagację tych prądów. To producent urządzenia decyduje, czy montuje taki filtr przed każdym napędem - w przypadku miniaturowych napędów, zwykle w linii zasilającej 24 V lub 48 V - czy tylko przed zasilaczem po stronie AC (rysunek 2). Ten ostatni oszczędza koszty, ale działa tylko wtedy, gdy same napędy są zaprojektowane w taki sposób, aby nie kolidowały ze sobą.
Odporność na zakłócenia w testach standardowych
W przypadku odporności na zakłócenia, standardowe testy obejmują szeroki zakres efektów elektromagnetycznych, takich jak odporność na zakłócenia przed wyładowaniami elektrostatycznymi (ESD) i na pola elektromagnetyczne o wysokiej częstotliwości z sąsiedniego emitera, odporność na zakłócenia przed szybkimi stanami przejściowymi (wyładowaniami), przepięciami, np. spowodowane przez wyładowania atmosferyczne lub przed zakłóceniami w trybie wspólnym RF na dłuższych liniach komunikacyjnych.
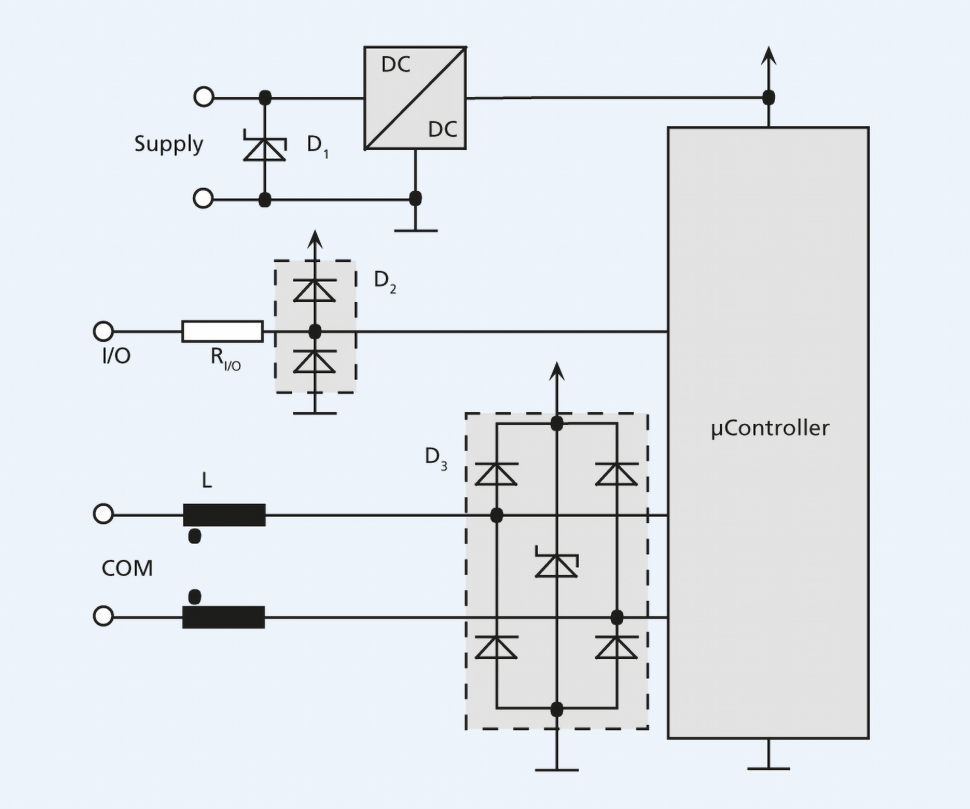
Dodatkowe testy dla krótszych spadków napięcia są zdefiniowane przede wszystkim dla napędów pracujących bezpośrednio w sieci zasilającej. Z drugiej strony, typowe wahania napięcia dla wielu napędów dynamicznych w systemie prądu stałego nie są w rzeczywistości wykrywane. W przypadku miniaturowych napędów dodatkowe środki tłumienia zakłóceń obejmują tutaj użycie możliwie najkrótszych kabli lub zastosowanie diod ochronnych po stronie zasilania. Możliwe są również filtry ferrytowe, takie jak powszechnie stosowane w kablach analogowych monitorów komputerowych lub przewodach komunikacyjnych (rysunek 3).
W przypadku napędów kompaktowych enkodery stanowią główne wyzwanie dla odporności komponentów na zakłócenia. Muszą być również umieszczone w minimalnej przestrzeni instalacyjnej. Jednak nawet w małych enkoderach wystarczającą ochronę przed wyładowaniami elektrostatycznymi można osiągnąć dzięki kompaktowym elementom ochronnym. Natężenia pola określone dla odporności na zakłócenia zasadniczo nie stanowią problemu ani w zakresie częstotliwości RF, ani w zakresie częstotliwości sieci. Odporność na zakłócenia w przypadku impulsów lub szybkich stanów nieustalonych wymaga filtrów zarówno na połączeniach zasilających, jak i na kablach sygnałowych.
Stanowi to jednak problem w połączeniach zasilających, ponieważ zasilacz jest zazwyczaj bezpośrednio podłączony do obwodów zintegrowanych w enkoderze. Skuteczna ochrona jest możliwa tylko w kompletnym urządzeniu. Pełna ochrona bezpośrednio w enkoderach przed standardowymi zakłóceniami nie jest zasadniczo konieczna. W razie potrzeby można jednak zainstalować diodę ochronną np. w płytce adaptera.
Sygnał testowy dla przewodzonych zakłóceń RF wg IEC 61000-4-6 jest większy niż użyteczny sygnał typowych enkoderów. Filtry trybu wspólnego w enkoderze dla silników o średnicach od 20 do 22 mm nie są jednak możliwe. W tym przypadku należy przeprowadzić ocenę na poziomie urządzenia, aby określić, jakich zakłóceń należy się spodziewać. W razie potrzeby odporność na zakłócenia można poprawić za pomocą zewnętrznie dołączonych ferrytów. Spadki napięcia w zasilaczu układu napędowego mogą spowodować wyłączenie układu.
W zależności od bufora zasilacza enkodera w kontrolerze ruchu może on być wtedy również niedostatecznie zasilany w przypadku spadków napięcia. W takiej sytuacji inkrementalne enkodery tracą bezwzględną informację o położeniu i muszą ponownie uzyskać poprawne odniesienie.

Projekt i dokumentacja zgodne z EMC
EMC dla miniaturowych napędów nie jest zatem zagadnieniem prostym dla użytkowników. Dlatego specjaliści od napędów w firmie FAULHABER bardzo szczegółowo zbadali ten złożony temat. Wszystkie sterowniki ruchu z szerokiej gamy produktów są zgodne z aktualnymi przepisami EMC. Nie tylko sprzęt został odpowiednio zoptymalizowany, ale także przeprojektowano dokumentację, aby zapewnić użytkownikom jak najlepsze wsparcie podczas certyfikacji ich własnych urządzeń.
FAULHABER












