Zaloguj
Zaloguj



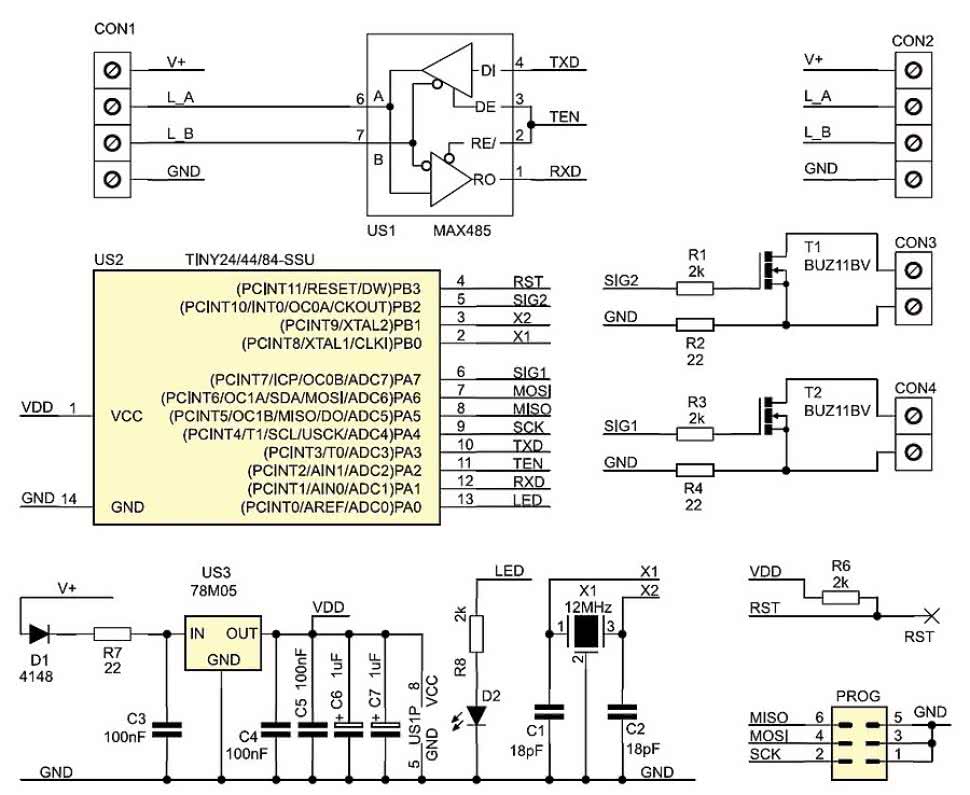
Rysunek 1. Schemat ideowy modułu PWM z interfejsem RS485
Schemat ideowy modułu PWM pokazano na rysunku 1. Budowa jest podobna do poprzednich modułów - za sterowanie odpowiada mikrokontroler Attiny24, napięcia stabilizowanego dostarcza układ 78M05, komunikacja z magistralą RS485 odbywa się poprzez układ MAX485.
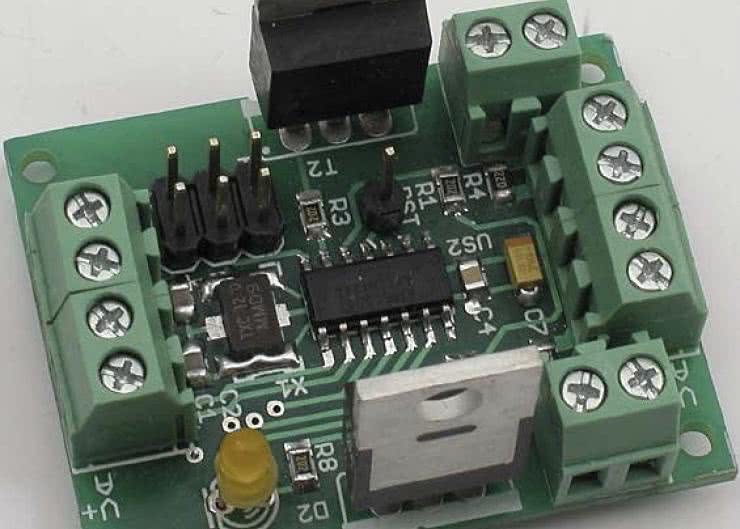
Elementami wykonawczymi są dwa tranzystory MOSFET-N. Obciążalność zależy od typu zastosowanych tranzystorów. W układzie modelowym zastosowano IRL3803 o napięciu maksymalnym 30 V i bardzo dużym prądzie drenu, ale bez dodatkowego radiatora nie powinno się przekraczać 5 A.
Nic nie stoi na przeszkodzie, aby zastosować inny typ tranzystorów i uzyskać inne parametry, ale muszą to być tranzystory typu "logic-level compatible". Na rysunku 2 pokazano sposób dołączenia odbiorników do modułu PWM. Należy pamiętać, że odbiorniki o charakterze indukcyjnym np. silniki czy przekaźniki wymagają dołączenia diody (np. 1N4007) zabezpieczającej przed przepięciami, tak jak na rysunku.
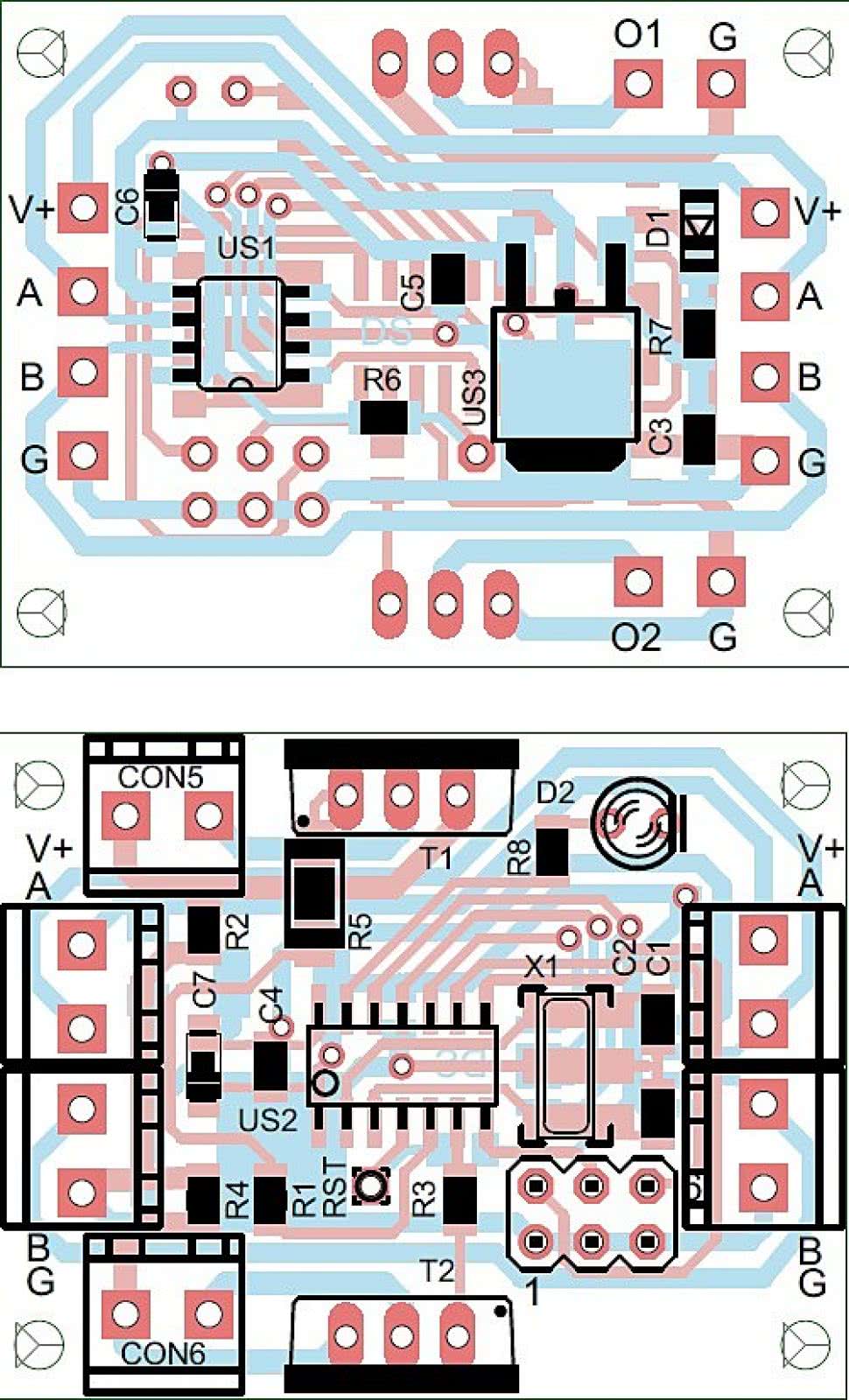
Rysunek 2. Schemat montażowy modułu PWM z interfejsem RS485
Sterownie modułem odbywa się poprzez magistralę RS485 przy pomocy prostych komend. Komeda sterująca musi zaczynać się ciągiem znaków "P x x" gdzie "xx" to adres modułu w zakresie 00...99. W przypadku sterownia cyfrowego, dalsza część komendy musi przyjąć jedną z trzech opcji:
- "= 1 <CR>" - powoduje załączenie wyjścia,
- "= 0 <CR>" - powoduje wyłączenie wyjścia,
- "= ? <CR>" - zwraca odpowiedź układu zawierającą aktualny stan wyjścia.
Natomiast w przypadku sterowania PWM komenda musi przyjąć postać "= vvv , ddd <CR>", gdzie: "vvv" to wartość współczynnika wypełnienia przebiegu pwm, w zakresie 0...255, "ddd" to współczynnik opóźnienia z jakim zostanie osiągnięta, podana wcześniej wartość wypełnienia. Możliwy zakres to 0...255.
Zapytanie o stan wyjścia zwraca odpowiedź w postaci P xx = vvv <CR>, gdzie "xx" to adres modułu a "vvv" to aktualna wartość współczynnika PWM. Gdy wyjście sterowane jest cyfrowo, to wartość będzie wynosiła 000 lub 255. We wszystkich przypadkach w komendach nie ma spacji a oznaczenie "<CR>" to znak końca linii - wartość ASCII równa 0x0D. Przykładowe komendy umieszczono w tabeli 1.
Układ wymaga wstępnej konfiguracji - potrzebny będzie terminal z interfejsem RS485 np. konwerter AVTMOD14 dołączony do komputera PC i programu Bray Terminal+. Założenie jumpera w pozycji 1 (rysunek 3) uruchamia automatyczne wysyłanie stanu wyjścia.

Rysunek 3. Funkcje jumperów konfigurujących
Funkcja ta może być włączona tylko w jednym module w całej magistrali i tylko wtedy, gdy nie ma urządzenia nadrzędnego. Powoduje wysyłanie na magistralę co ok. 4 sekundy komendy ze stanem wyjścia. Może być przydatna do identyfikowania modułów, ponieważ komenda zawiera adres modułu.
Założenie jumpera w pozycji 2 (rys. 3) a następnie włączenie zasilania modułu powoduje przywrócenie domyślnego adresu o wartości "00". Założenie jumpera w pozycji 3 (rys. 3) i włączenie zasilania modułu powoduje wejście w tryb zmiany adresu.
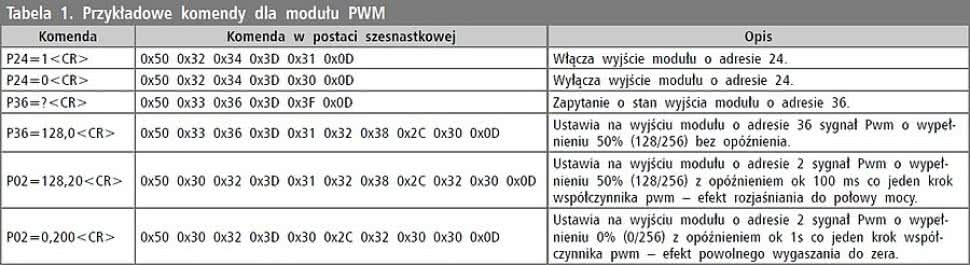
Tabela 1. Przykładowe komendy dla modułu PWM
Moduł wysyła wartość aktualnego adresu a następnie czeka na wprowadzenie nowej wartości. Po zatwierdzeniu klawiszem Enter nowa wartość zostaje zapamiętana i układ jest gotowy do pracy. Należy pamiętać, że drugie wyjście modułu automatycznie dostaje adres zwiększony o jeden, dlatego modułom należy nadawać adresy zwiększane o 2.
KS