Zaloguj
Zaloguj



Schemat elektryczny przełącznika pokazano na rysunku 1. Układ powinien być zasilany napięciem stałym o wartości 12 V DC dołączonym do złącza VCC. Dioda D1 zabezpiecza układ przed niewłaściwą polaryzacją napięcia wejściowego, natomiast kondensatory C1...C6 pełnią rolę filtra zasilania. Zewnętrzne napięcie wejściowe jest podawane na stabilizator U1 typu 7805.
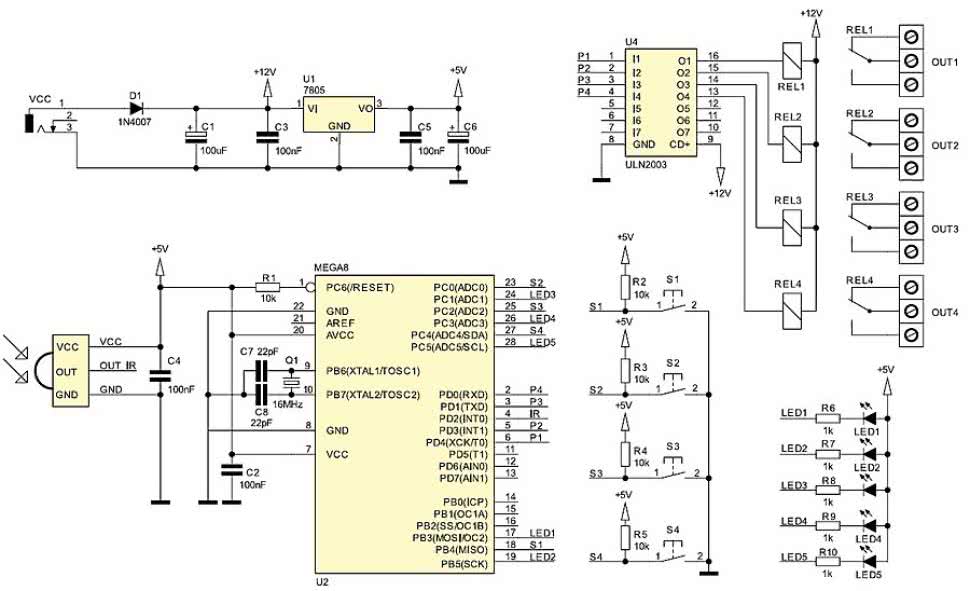
Rysunek 1. Schemat ideowy zdalnie sterowanego przełącznika
Rolę odbiornika kodów IR pełni układ U3 TSOP4836, a całą pracą przełącznika steruje mikrokontroler ATmega8 taktowany zewnętrznym sygnałem zegarowym. Główne zadanie, które wykonuje mikrokontroler, a właściwie jego program, to odbieranie sygnału z odbiornika podczerwieni i odnajdowanie w tym sygnale ramek, czyli kodów wysyłanych z pilota IR.
Taka ramka zwykle zawiera od kilkunastu do kilkudziesięciu impulsów, których czasy trwania i czasy przerwy z reguły mieszczą się w przedziale 0,2...3 ms. Program pozwala mierzyć impulsy o długości do 8 ms, a jeżeli na wejściu sygnału utrzyma się niezmieniony poziom przez 8 ms, to oznacza, że nadawanie jednej ramki zostało zakończone i najbliższy impuls będzie początkiem nowej ramki.
Gdy pojawi się sygnał program odmierza czasy impulsów i czasy przerw pomiędzy nimi i zapisuje wyniki w tablicy aż do kolejnej przerwy lub do uzyskania 64 pomiarów. Zatem jedynymi ograniczeniami odnośnie do pilota (kodu), którego urządzenie potrafisię "nauczyć" jest czas pojedynczego impulsu i przerwy, które muszą zawierać się we wspomnianych granicach oraz maksymalna długość kodu - 32 impulsy (i 32 przerwy).
Ostatni warunek to częstotliwość modulacji sygnału IR - każdy pilot wysyła kody na określonej częstotliwości nośnej, najpopularniejsza i najczęściej spotykana to 36 kHz, mniej popularne to 38 lub 40 kHz. Zastosowany odbiornik podczerwieni TSOP1736 jest przystosowany do sygnałów o częstotliwości 36 kHz, ale z nieco mniejszą czułością odbiera również sygnały 38 kHz. W razie potrzeby odbiornik można wymienić na podobny o innej częstotliwości.
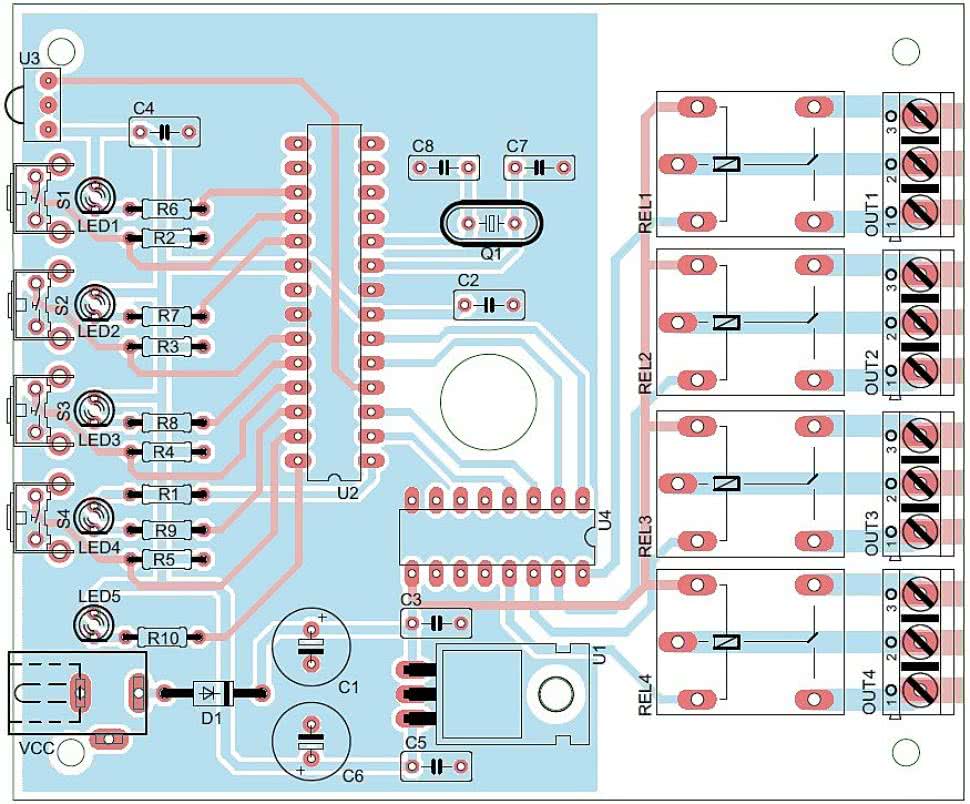
Rysunek 2. Schemat montażowy zdalnie sterowanego przełącznika
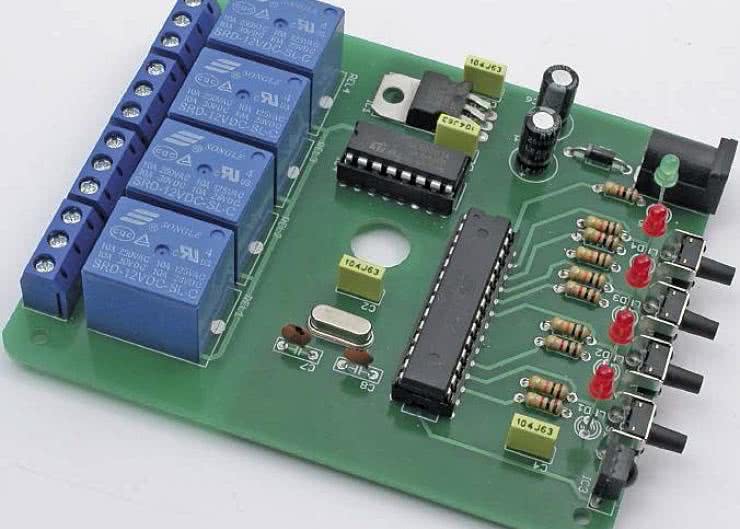
Jako bufor wyjściowy zastosowano układ ULN2003A, który służy do zasilania przekaźników typu JQC3FF/012-1ZS (cewka 12 VDC, styki 10 A/230 VAC). Przy sterowaniu obciążeniem o znacznej mocy należy zwrócić uwagę na obciążenie styków przekaźnika oraz ścieżek płytki drukowanej. Aby poprawić ich obciążalność można pocynować ścieżki lub ułożyć na nich i przylutować przewód miedziany.
Przełącznik wyposażony został w przyciski umożliwiające bezpośrednie przełączanie przekaźników bez konieczności stosowania pilota. Krótkie przyciśniecie przycisku pozwala zmieniać stan przekaźnika. Diody LED1...LED4 sygnalizują, który przekaźnik jest aktualnie uruchomiony, natomiast dioda LED5 pełni rolę sygnalizatora, informuje ona zarówno o pracy układu, odebraniu komendy z pilota jak i wejściu w tryb programowania.
Schemat montażowy przełącznika pokazano na rysunku 2. Całość została zmontowana na dwustronnej płytce drukowanej o wymiarach 83 mm× 98 mm dopasowanej do obudowy KM35. Montaż układu rozpoczynamy od wlutowania w płytkę oporników i innych elementów o niewielkich rozmiarach, a kończymy montując kondensatory elektrolityczne przekaźniki i złącza śrubowe. Sterownik zmontowany ze sprawwnych elementów nie wymaga jakiejkolwiek regulacji i po zarejestrowaniu komend wysyłanych przez pilota jest gotowy do pracy.
Wejście w tryb programowania kodów pilota odbywa się poprzez przytrzymanie odpowiedniego przycisku przez czas około 5sek. Po wykonaniu tej czynności dioda LED odpowiadająca programowanemu kanałowi zacznie migać. Oznacza to że układ oczekuje na podanie i potwierdzenie komendy z pilota, komendy która odpowiadać będzie za przełączanie przekaźnika.
Prawidłowe odebranie przez układ kodu pilota zaowocuje dłuższym zaświeceniem diody LED, po czym jej ponowne migotanie będzie oznaczało, iż układ oczekuje potwierdzenia zarejestrowanej wcześniej komendy. Należy wtedy ponownie przycisnąć ten sam przycisk w pilocie. Po odebraniu prawidłowej komendy procedura programowania zostaje zakończona a układ powróci do normalnej pracy. Wejście w tryb programowania możliwe jest w dowolnym momencie pracy układu i odbywa się niezależnie dla każdego z czterech kanałów.
EB