 Zaloguj
Zaloguj



Współczesne aparatury projektowane są z myślą o jak najszybszej odpowiedzi serwomechanizmu na ruch drążka lub przełącznika w nadajniku. Oczywiście można połączyć bezpośrednio serwomechanizm z odbiornikiem, ale efekt w przypadku choćby opuszczanego i podnoszonego podwozia jest po prostu śmieszny. Koła wyskakują z kadłuba, jakby poruszane były sprężyną. Sam widziałem kilka takich rozwiązań na filmach dostępnych w Internecie i za każdym razem miałem wrażenie zupełnego braku realizmu. Opisywane urządzenie ma pomóc w rozwiązaniu tego problemu.
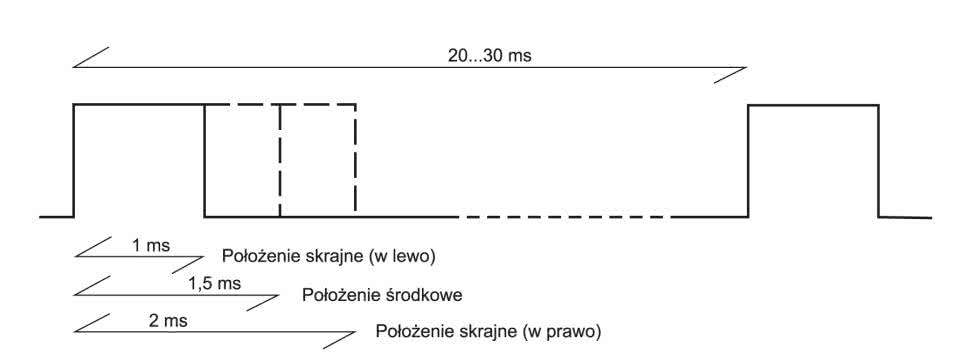
Odbiorniki zdalnego sterowania mogą być zasilane napięciem 3,5...9 V, natomiast serwomechanizmy 4,8...6 V. Aby dostosować napięcie ze źródła zasilania do potrzeb toru odbiorczego, wykorzystuje się stabilizatory, które obniżają napięcie. Sterowanie modelem odbywa się poprzez wysyłanie impulsów o określonym okresie powtarzania i zmiennym wypełnieniu do serwomechanizmów. Wypełnienie impulsu określa aktualne położenie serwomechanizmu. Typowym czasem powtarzania impulsów sterujących jest 20 ms, chociaż serwomechanizmy działają poprawnie nawet przy czasach powtarzania 30 i więcej ms. Czas trwania impulsu to 1...2 ms. Położeniu środkowemu serwomechanizmu odpowiada czas 1,5 ms. Amplituda impulsu zawiera się w granicach 3...5 V. Na rys. 1 przedstawiono parametry impulsu sterującego serwomechanizmem.
Opisywany układ służy do sterowania urządzeniami pomocniczymi, wobec czego dokładność ustawienia nie ma tu większego znaczenia, natomiast kluczową rolę odgrywają przede wszystkim małe wymiary, niski pobór prądu, możliwość pracy przy dużej rozpiętości napięć zasilania, prostota i niski koszt urządzenia.
Aby spowolnić ruch serwomechanizmu, należy wykonać trzy czynności: zmierzyć długość impulsu z odbiornika, odczytać wartość opóźnienia oraz zgodnie z odczytaną wartością zmieniać wypełnienie impulsu wysyłanego do serwomechanizmu, aż do osiągnięcia zrównania się wypełnienia impulsów na wejściu i wyjściu. Mikrokontroler musi zatem być wyposażony w co najmniej 2 timery, w tym jeden umożliwiający generowanie impulsu o zmiennym wypełnieniu. Musi mieć również możliwość zadawania wielkości opóźnienia. Do tego celu dobrze nadaje się potencjometr połączony z wejściem przetwornika A/C. Z tych powodów wybór padł na ATtiny85 w obudowie SMD.
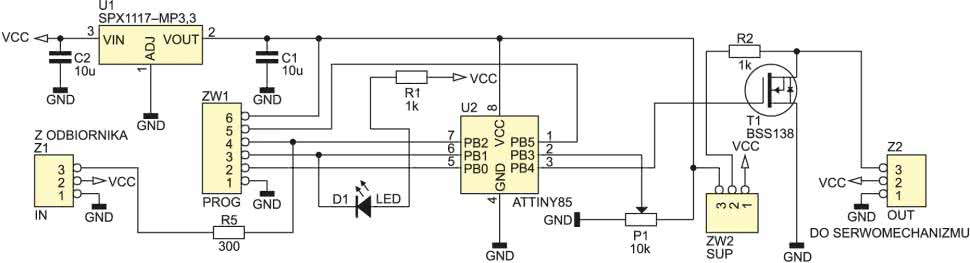
Na rys. 2 widać schemat układu. W celu umożliwienia pracy układu w szerokim zakresie napięć zasilania zastosowano stabilizator SX1117. Układ ten zapewnia poprawną stabilizację napięcia wyjściowego już przy napięciu zasilania 4,5 V. Maksymalne napięcie wejściowe nie może przekraczać 20 V. Napięcie zasilania serwomechanizmu jest podawane bezpośrednio z odbiornika. Jest to najczęściej stosowana metoda. Każdy „szanujący się” odbiornik może zasilać wszystkie podłączone do niego serwomechanizmy.
Impulsy wejściowe z odbiornika są podawane na złącze Z1. Należy zwrócić uwagę na układ wyprowadzeń złącza. Jest on typowy dla zdecydowanej większości aparatur zdalnego sterowania. W celu zminimalizowania zewnętrznych elementów wykorzystałem wewnętrzny generator RC procesora. Pracuje on z częstotliwością 8 MHz i dokładnością wystarczającą na potrzeby urządzenia.
Pomiar wypełnienia impulsu jest realizowany przez timer T0 mikrokontrolera. Częstotliwość taktowania ustawiono na 125 kHz. Ponieważ zmiana wypełnienia to około 1 ms, dokładność pomiaru wynosi ok. 1,2%. Jeżeli założymy, że serwomechanizm ma zakres ruchu 180°, dokładność ustawienia wynosi ok. 2°. Program sprawdza, czy nie został przekroczony minimalny oraz maksymalny czas wypełnienia, co może się zdarzyć w przypadku działania odbiornika. Jeżeli sprawdzenie da wynik negatywny, wynik pomiaru jest ignorowany.
Do generowania impulsu sterującego serwomechanizmem użyłem timera T1. Jest on taktowany przebiegiem o częstotliwości 100 kHz. Przy tak dobranej częstotliwości impuls wyjściowy ma od 10 µs do 2,54 ms. Taki zakres umożliwia pełny ruch serwomechanizmu. Dokładność ustawienia wynosi 1/254 całego zakresu. Poza generowaniem impulsu sterującego timer T1 wyznacza czas powtarzania impulsów. Czas jego pracy podzielony jest na 13 odcinków czasowych. W jednym generowany jest impuls, w pozostałych 12 do rejestru porównania jest wpisywana wartość FF, co blokuje wyjście licznika.
Rezystor R5 ogranicza prąd wejścia PB2 procesora. Potencjometr P1 jest podłączony do wejścia przetwornika A/C. Służy on do ustawiania czasu opóźnienia ruchu. Czas opóźnienia może być ustawiany w zakresie 1...10 s.
Sterowanie serwomechanizmem odbywa się poprzez tranzystor T1. Zwora Z2 służy do ustawiania napięcia zasilającego tranzystor. Umożliwia to zmianę amplitudy impulsów sterujących serwomechanizmem.
Dioda LED, po połączeniu wyprowadzeń ZW1–5 i ZW1-3, sygnalizuje pojawianie się poprawnych impulsów z odbiornika. Złącze ZW1 służy do zaprogramowania procesora.
Zygmunt Dziewoński
zygdziew@polnet.cc
- R1, R2: 1 kΩ
- R3: 300 Ω
- P1: 10 kΩ potencjometr montażowy
- C1,C2: 10 µF (ceramiczny, SMD)
- U1: SPX1117-MP3.3
- U2: ATiny85 (SMD)
- T1: BSS138
- D1: LED (SMD)
- Z1,Z2: goldpin męski, kątowy 3×1
- ZW1: goldpin męski, prosty 6×1
- ZW2: goldpin męski, prosty 3×1












