 Zaloguj
Zaloguj



Podstawowe parametry sterownika to:
- napięcie zasilania 5...24 VDC,
- prąd obciążenia do 0,6 A/kanał (cewkę),
- sterowanie silnikiem krokowym bipolarnym (4 przewody),
- potencjometr do regulacji prędkości obrotowej.
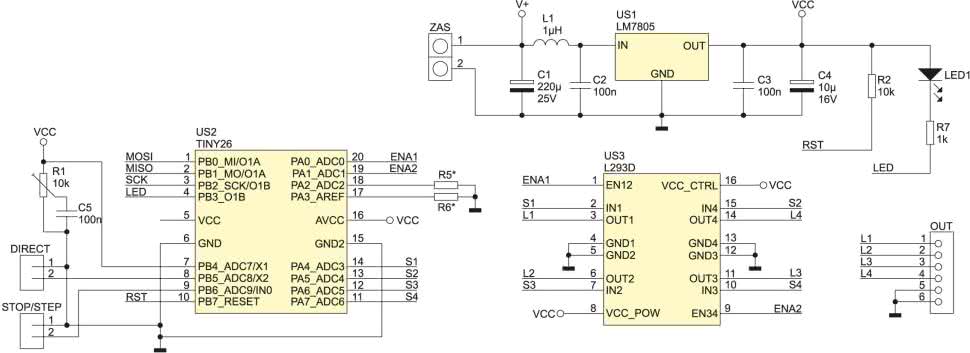
Schemat układu umieszczono na rysunku 1. Możemy na nim wyróżnić trzy bloki: zasilania ze stabilizatorem US1, sterujący z układem ATtiny26 i stopień wykonawczy z L293D. Potencjometr R1 służy regulacji prędkości obrotowej silnika w zakresie ok. 15...390 kroków/sekundę, a dioda LED1 sygnalizuje stan pracy układu. Złącza Direct i Start/Stop służą odpowiednio, do sterowania wyborem kierunku obrotów i hamowania silnika. Dodatkowo, po stronie lutowania zostało umieszczono pocynowane pola do ewentualnego programowania mikrokontrolera.
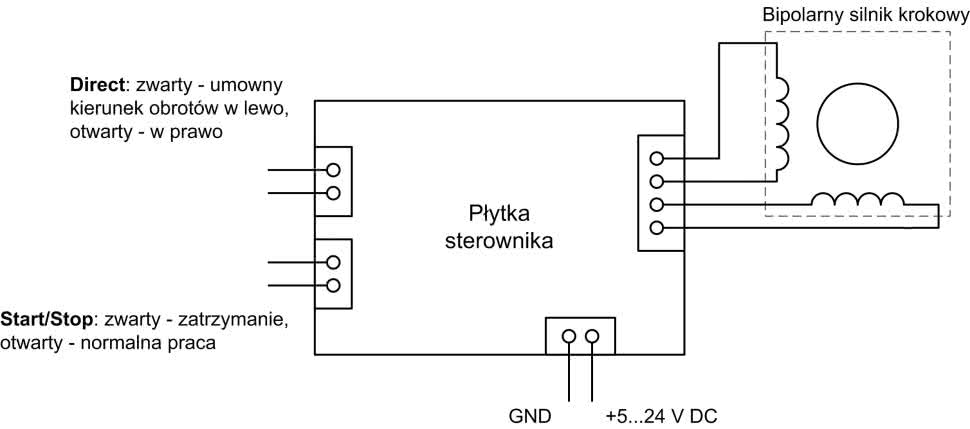
Na rysunku 2 pokazany jest sposób połączenia układu z silnikiem. Sposób sterowania silnikiem krokowym bipolarnym nie będzie omawiany. Dodatkowe funkcje sterownika ustawiamy zworkami z cyny lub rezystorami o niewielkiej wartości montowanymi w miejscach elementów R5 i R6.
Konfiguracji należy dokonywać przy wyłączonym układzie:
- R5: wybór trybu pracy silnika. Brak zwory – praca krokowa, zwora – praca półkrokowa. Praca krokowa to najprostszy sposób sterowania silnika krokowego. Praca półkrokowa, to dodanie w sekwencji sterującej, stanów pośrednich. W praktyce powoduje bardziej płynną pracę silnika, ale zwiększa pobór prądu.
- R6: wybór sposobu zatrzymania. Brak zwory – zatrzymanie statyczne, zwora – dynamiczne. Po podaniu stanu niskiego na wejście Start/Stop, przy ustawieniu „dynamiczne”, na wyjściu sterownika utrzymuje się kombinacja sygnałów zasilających z momentu podania sygnału zatrzymania, czyli załączone są odpowiednie napięcia zasilające cewek silnika. W praktyce powoduje to jego zablokowanie w określonym położeniu, ale przez uzwojenia silnika przepływa prąd, co jest powodem ich nagrzewania się. Zatrzymanie statyczne powoduje odłączenie zasilania silnika w stanie zatrzymania. Tym samym jego oś obraca się swobodnie, a układ pobiera tylko niewielki prąd spoczynkowy.
Na rysunku 3 pokazano schemat montażowy sterownika.
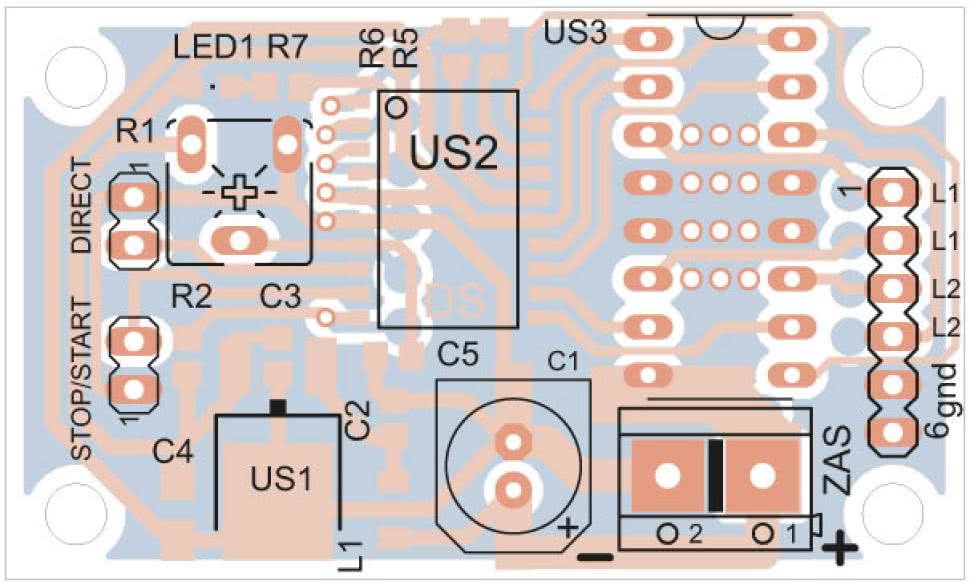
Montaż jest prosty i nie powinien nastręczać żadnych problemów. Po zmontowaniu z zastosowaniem zaprogramowanego mikrokontrolera, układ jest gotowy do pracy natychmiast po włączeniu zasilania.
KS
- R1: 10 kΩ potencjometr
- R2: 10 kΩ SMD 0805
- R5, R6: 1 Ω SMD 0805
- R7: 1 kΩ SMD 0805
- C1: 220 µF/25 V SMD
- C4: 10 µF/16 V SMD tantalowy
- C2, C3, C5: 100 nF ceramiczny SMD
- US1: 78M05 SMD
- US2: ATtiny26 SMD
- US3: L293D
- LED1: dioda led SMD 0805
- L1: 10 µH SMD 0805
- Direct, Start/Stop: goldpin kątowy 1×2
- Out: goldpin kątowy 1×6
- Zas: ARK2/500
- Jumper: 2 szt.












