Zaloguj
Zaloguj




- buforowanie sygnału logicznego dla czterech wyjść,
- układ wyprowadzeń w standardzie zgodnym z większością serwomechanizmów,
- możliwość zasilania ze sterownika lub z zewnętrznego zasilacza,
- zasilanie napięciem od 2…6 V.
Ten prosty układ regeneruje sygnał sterujący dla czterech serwomechanizmów oraz dystrybuuje zasilanie do nich. Każde z wyjść ma odrębny bufor cyfrowy, więc nieprawidłowe działanie jednego serwomechanizmu nie wpłynie negatywnie na pracę pozostałych.
Budowa i działanie
Schemat ideowy pokazano na rysunku 1. Rolę bufora cyfrowego pełni układ 74HC125, który cechuje się znikomym poborem prądu oraz zdolnością do regeneracji zboczy sygnału wejściowego, a to za sprawą wbudowanych przerzutników Schmitta. Wejścia aktywujące zostały zwarte z masą, przez co wszystkie wyjścia pracują.
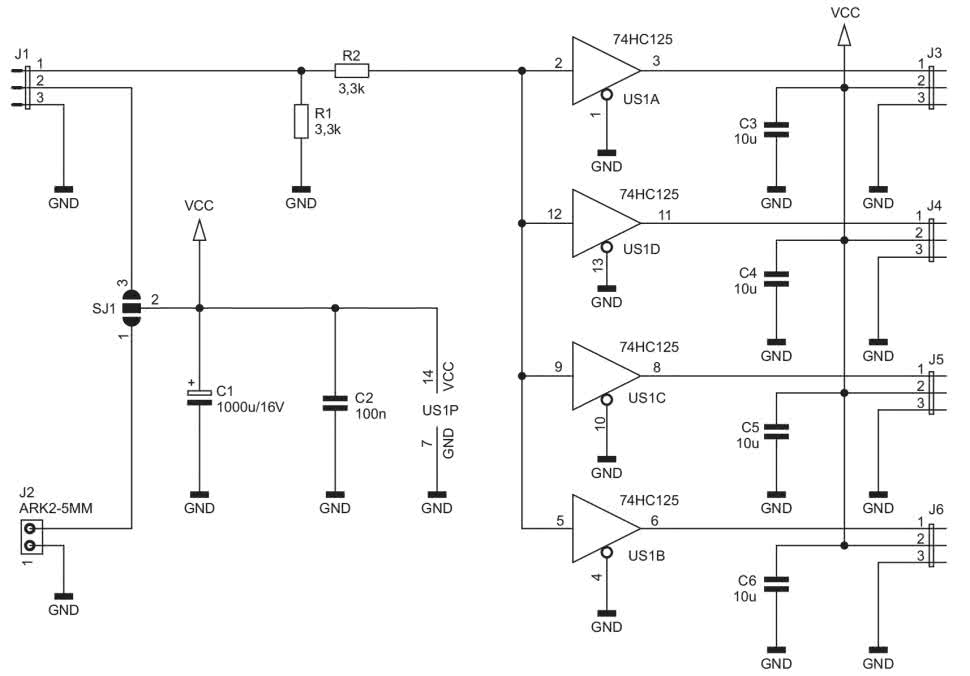
Wejście sygnałowe jest spolaryzowane do masy rezystorem R1, którego zadaniem jest również odprowadzanie do masy ładunków elektrostatycznych.
Rezystor R2 ogranicza prąd płynący przez diody zabezpieczające wejścia buforów w razie, gdyby na wejściu pojawił się impuls napięcia o nieprawidłowej wartości.
Zasilanie dla układu jest wybierane przy użyciu kropli cyny, którą należy nanieść na odpowiednie pola lutownicze SJ1. Może ono pochodzić z układu sterującego (pola 2-3) lub z zewnętrznego zasilacza (pola 1-2), jeżeli układ sterujący ma zbyt małą wydajność prądową wyjścia zasilającego lub spadek napięcia na przewodach jest nieakceptowalny. Kondensatory redukują impedancję wewnętrzną źródła zasilania, co poprawia pracę serwomechanizmów, które prąd pobierają głównie impulsowo.
Układ wyprowadzeń w złączach: J1 (wejściowym) i J3…J6 (wyjściowych) jest następujący: 1 – sygnał, 2 – zasilanie, 3 – masa. Jest spotykany w większości serwomechanizmów dostępnych na rynku.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 38×40 mm, a wzór ścieżek oraz schemat montażowy pokazuje rysunek 2.

W odległości 3 mm od krawędzi płytki znalazły się otwory montażowe. Zmontowany i gotowy do działania układ pokazuje fotografia tytułowa.
Pobór prądu z zasilania (przy braku serwomechanizmów podłączonych do złącz J3…J6) jest na poziomie pojedynczych mikroamperów. Opóźnienie wprowadzane przez bufory jest pomijalnie małe, wynosi około 17 ns, co udowadnia oscylogram z rysunku 3.

Przebieg żółty to sygnał wejściowy, a niebieski – wyjściowy, widoczna jest poprawa jakości zbocza narastającego. Pomiar wykonano przy napięciu zasilającym 5 V.
Michał Kurzela, EP
- R1, R2: 3,3 kΩ SMD0805
- C1: 1000 μF/16 V raster 5 mm THT
- C2: 100 nF SMD0805
- C3…C6: 10 μF/10V SMD0805
- US1: 74HC125 SO14
- J1, J3…J6: goldpin 3 pin 2,54 mm THT
- J2: ARK2 5 mm