 Zaloguj
Zaloguj



- konstrukcja oparta na scalonym mostku H typu TB67H45x,
- obciążalność mostka: 1,5 A (ciągła)/3,5 A (szczytowa),
- zakres napięć zasilania: 4...50 V,
- wejścia sterujące: IN1,2 (kierunek ruchu, hamowanie),
- możliwość sterowania prędkości obrotowej sygnałem PWM.
Strukturę wewnętrzną układu TB67H45x pokazano na rysunku 1.
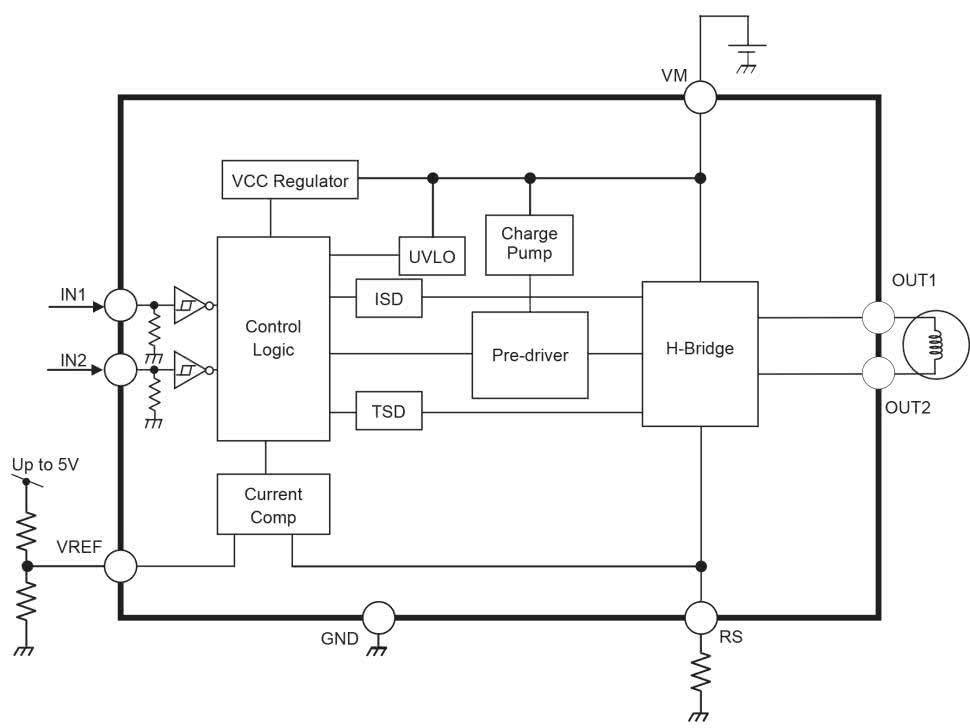
TB67H450/451 zwiera jednokanałowy stopień mocy (mostek H) o obciążalności do 1,5 A (maksymalnie 3,5 A) i zalecanym napięciu pracy 5...40 V. Niska rezystancja kluczy – wynosząca maksymalnie 0,8 Ω – ogranicza moc strat. Układ wyposażony został w zabezpieczenie przeciążeniowe (ISD) i termiczne (TSD) oraz obwody wyłączające mostek po zbyt głębokim spadku napięcia zasilania (ULVO). W zależności od typu układu zabezpieczenie przeciążeniowe jest zatrzaskiwane (w przypadku TB67H450) lub samopowrotne (w modelu TB67H451).
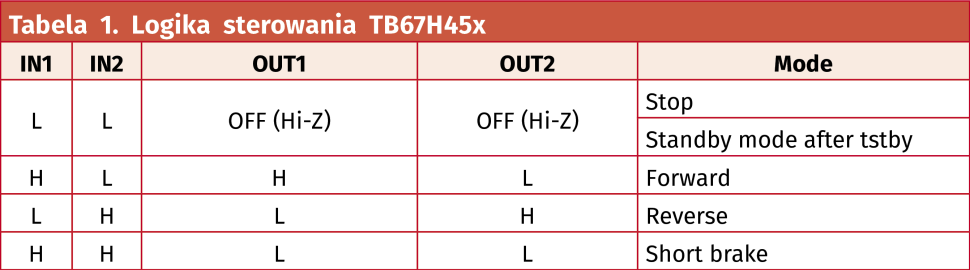
Pełne sterowanie mostkiem umożliwia uzyskanie czterech stanów pracy: obroty w przód, tył, hamowanie i zatrzymanie wirnika. Logikę sterowania wyprowadzeń IN1,2 zaprezentowano w tabeli 1.
Gdy oba wejścia sterujące IN1,2 są w stanie niskim przez czas dłuższy niż 1 ms, układ automatycznie przechodzi w stan obniżonego poboru mocy, pobierając prąd nie większy niż 1 μA. Wybudzanie układu trwa nie dłużej niż 30 μs, co pozwala na efektywne oszczędzanie energii, szczególnie w układach zasilanych bateryjnie lub akumulatorowo, bez konieczności używania dodatkowych wyprowadzeń sterujących.
Regulacja obrotów może być realizowana metodą bezpośredniego PWM lub metodą przerywania ustalonego prądu maksymalnego w trybie Chopper. Tryb PWM ulega aktywacji, gdy wyprowadzenie RS podłączone jest do masy, a sygnał PWM (o częstotliwości maksymalnej 400 kHz) doprowadzony jest do jednego z wyprowadzeń IN1, IN2. Maksymalna wartość prądu w trybie Chopper definiowana jest kombinacją oporności rezystora podłączonego do wyprowadzenia RS i wartości napięcia odniesienia na wyprowadzeniu VREF. W trybie Chopper także możliwa staje się regulacja prędkości metodą PWM.
Maksymalny prąd można obliczyć ze wzoru:
Iomax=Vref(gain)·Vref/Rrs
gdzie
Vref(gain)=1/10,0
Napięcie regulacyjne Vref musi zawierać się w przedziale 1...4 V, wejście Vref akceptuje napięcia w przedziale 0...5,5 V. W modelu przy zasilaniu 5 V, Vref~=0...4 V, RS=0,22 Ω, prąd maksymalny wynosi ok. 1,85 A. Regulacja odbywa się w trzech fazach, co pokazano na rysunku 2.
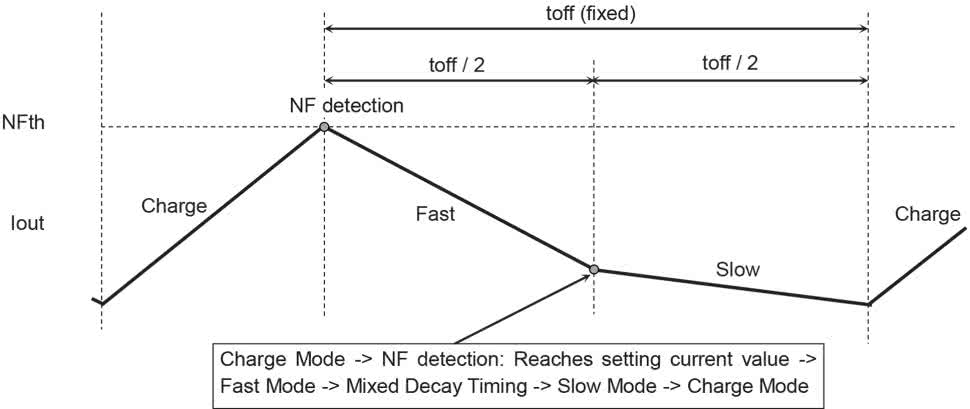
W pierwszej fazie mostek H załącza prąd na uzwojenie, aż do momentu osiągnięcia detekcji ustalonego prądu (NFth). W drugiej fazie silnik hamowany jest przeciwprądem (fast decay), natomiast na trzecim etapie – prądem zwarcia (slow decay). Czas trwania drugiej i trzeciej fazy sterowania jest ustalony na 25 μs z 50-procentowym podziałem pomiędzy fazę drugą i trzecią. Jeżeli podczas drugiej fazy prąd zaniknie (I=0), wyjścia mostka ustawiane są w stan wysokiej impedancji.
Schemat modułu pokazano na rysunku 3.
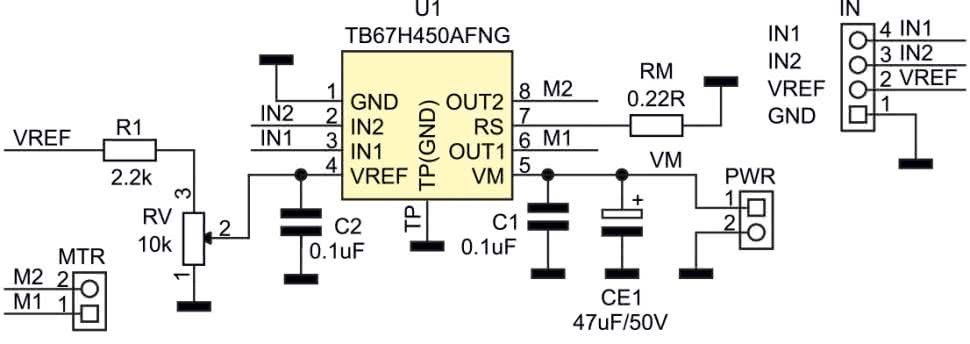
Aplikacja TB67H45x okazuje się bardzo prosta: moduł zasilany jest napięciem stałym ze złącza PWR, odsprzęganym przez CE1, C1. Silnik podłączony jest do złącza MTR, natomiast sterowanie i napięcie VREF – do złącza IN. W modelu domyślnie wybrany jest tryb Chopper, co wymaga montażu odpowiednio obliczonego RM; prąd ograniczenia ustalony został na ok. 1,8 A (Vref=5 V, RM=0,22 Ω). Potencjometr RV umożliwia zmniejszenie prądu maksymalnego.
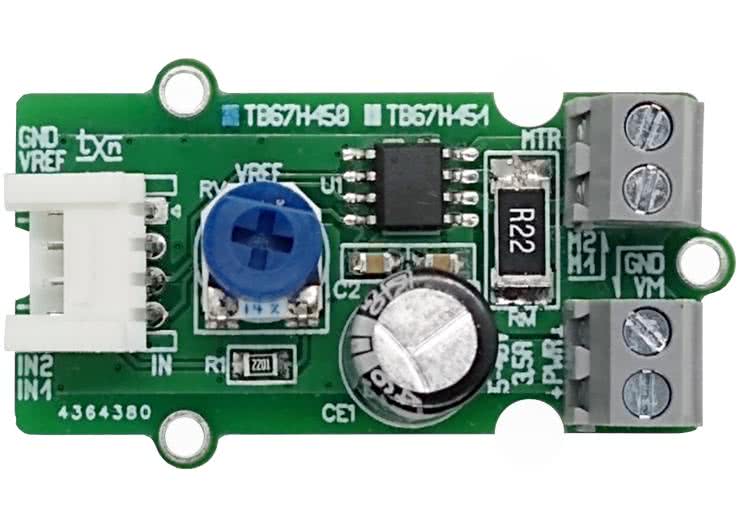
Minimoduł zmontowany został na dwustronnej płytce drukowanej zgodnej z Grove. Rozmieszczenie elementów zobrazowano na rysunku 4.
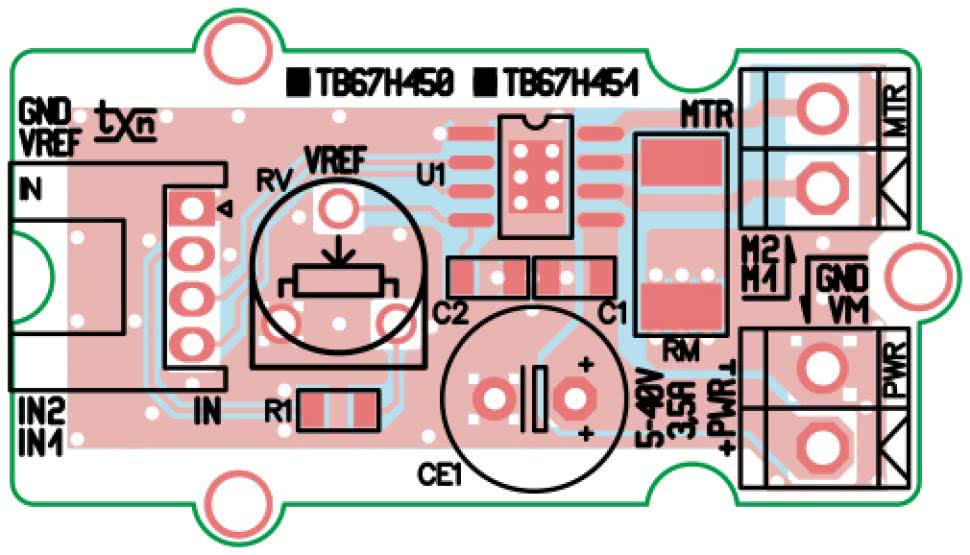
Sposób montażu jest klasyczny i nie wymaga opisu, należy jedynie zwrócić uwagę na wybór odpowiedniej wersji układu U1: TB67H450/451 oraz poprawnie przylutować jego pad termiczny. W przypadku forsownej pracy na U1 warto nakleić radiator i wymusić obieg powietrza chłodzącego. Zmontowany minimoduł pokazano na fotografii tytułowej.
Moduł nie wymaga uruchamiania – zmontowany ze sprawnych elementów dobranych pod kątem parametrów używanego silnika, działa od razu po włączeniu zasilania i doprowadzeniu sygnałów sterujących. Moduł pracuje poprawnie zasilany napięciem 5 V, możliwa jest też praca z nieco niższym zasilaniem.
Próg detekcji stanu wysokiego na wyprowadzeniach IN1, IN2 wynosi 2 V, więc po przeliczeniu dzielnika R1, RV i RM, tak aby spełnić wymogi prądu maksymalnego silnika, można go zasilać niższym napięciem np. 3,3 V.
Adam Tatuś, EP
- R1: 2,2 kΩ (SMD 0805)
- RM: 0,22 Ω (SMD 2512, 2W)
- C1, C2: 100 nF/50 V (SMD 0805)
- CE1: 47 μF/50 V (elektrolityczny D=8 mm, r=3,5 mm)
- U1: TB67H450AFNG lub TB67H451AFNG (HSOP8)
- MTR, PWR: złącze DG 2-pin 3,5mm (DG381-3.5-2)
- RV: potencjometr montażowy pionowy 5 mm 10 kΩ












