Zaloguj
Zaloguj



- wytwarzanie ciągłego sygnału prostokątnego o regulowanej częstotliwości i wypełnieniu (PWM),
- dwa potencjometry do ustawiania żądanych parametrów sygnału,
- brak wpływu regulacji częstotliwości na wypełnienie i odwrotnie,
- regulacja częstotliwości w zakresie 45…1250 Hz,
- regulacja wypełnienia w zakresie 0…100%,
- zasilanie napięciem stałym 10…20 V, pobór prądu ok. 10 mA.
Czy tylko mikrokontrolery mogą generować sygnał PWM? Absolutnie nie, wystarczy zaledwie garść tanich i łatwo dostępnych elementów, by zbudować układ, który radzi sobie z tym zadaniem wcale nie gorzej niż układ programowalny. Obszarów zastosowania takiego rozwiązania jest naprawdę sporo: od wykonywania szybkich testów podzespołów po kontrolery jasności oświetlenia albo mocy nawiewu.
Tym, czym różni się ten układ od bardzo popularnych kontrolerów PWM na bazie timerów 555, jest całkowity brak wpływu częstotliwości na wypełnienie oraz wypełnienia na częstotliwość. Jeden potencjometr reguluje jeden parametr sygnału, na drugi nie mając żadnego wpływu. Nie ma też problemu z uzyskaniem wypełnienia zarówno 0% (trwałe wyłączenie), jak i 100% (trwałe załączenie wyjścia), co może być użyteczne podczas praktycznych testów.
Budowa i działanie
Schemat ideowy omawianego układu znajduje się na rysunku 1. Najistotniejszym elementem aktywnym bez wątpienia jest podwójny komparator typu LM393. US1A został skonfigurowany do pracy jako generator sygnału prostokątnego, lecz przekazywany dalej sygnał pochodzi z okładek kondensatora C1 - ma on kształt quasi-trójkątny. Za tempo przeładowywania C1 odpowiada wypadkowa rezystancja szeregowego połączenia elementów R5 i P1. Im niższa, tym szybciej się ono odbywa.
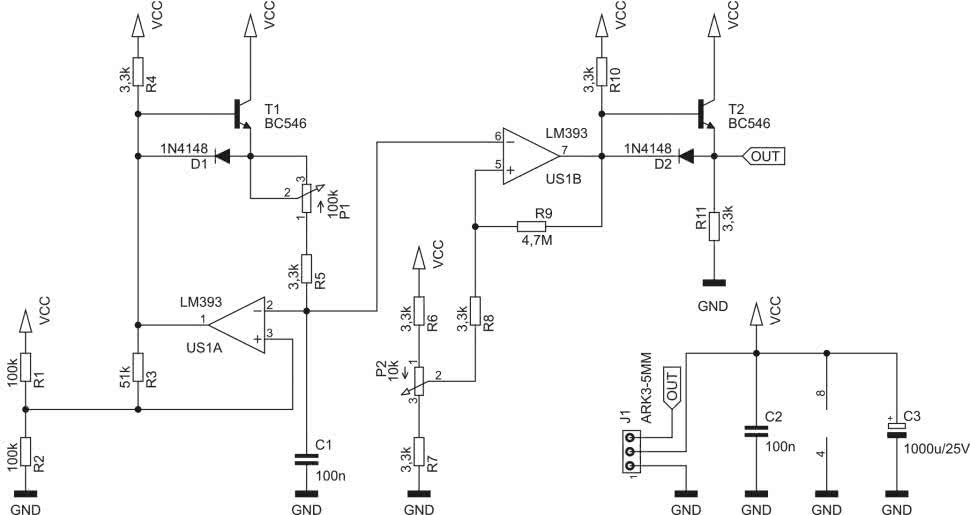
Rezystory R1…R3 wprowadzają dodatnie sprzężenie zwrotne, ustalając przy tym szerokość pętli histerezy oraz progi przerzutu komparatora. W przeciwieństwie do generatorów realizowanych z bramek cyfrowych, taka metoda pozwala na bardzo dokładne ustalenie parametrów napięciowych wytwarzanego sygnału trójkątnego. Ma to znaczenie dla prawidłowej pracy następnego stopnia.
Gdyby US1A był komparatorem idealnym, w tym miejscu mógłbym zakończyć opis niniejszego bloku. Ale nie mogę pominąć faktu, że LM393 ma wyjścia typu otwarty kolektor, toteż nie są one w stanie „oddawać” prądu, mogą jedynie go „wsysać”. Prostym rozwiązaniem tego problemu, choć niedoskonałym, jest użycie wtórnika na tranzystorze T1, którego baza jest polaryzowana przez rezystor R4. Do wyrównania rezystancji dynamicznej takiego zmodyfikowanego wyjścia służy dioda D1, która otwiera się, kiedy potencjał owego wyjścia ma zmaleć. Zatem T1 „dolewa” prąd do C1, zaś D1 i tranzystor wyjściowy w US1A go „wyciągają” z C1.
Tak uzyskany przebieg trójkątny (dokładniej: ze zboczami wykładniczymi, ale nie ma to dużego znaczenia) jest porównywany przez komparator US1B z napięciem, które daje potencjometr P2 na swoim ślizgaczu. Za jego pomocą można regulować wypełnienie, co odbywa się w sposób zupełnie niezależny od regulacji częstotliwości. Jeżeli chwilowa wartość napięcia trójkątnego przekracza ustaloną potencjometrem wartość, wyjście US1B przyjmuje stan niski, w przeciwnym razie - wysoki. Rezystory R8 i R9 wprowadzają niewielką histerezę, by przełączanie wyjścia tego komparatora odbywało się bez oscylacji na progu przerzutu. Rezystory R6 i R7 zawężają zakres regulacji napięcia ustalającego próg przerzutu, bo sygnał trójkątny na okładkach C1 nie zawiera się w całym zakresie dostępnego napięcia zasilającego.
Wyjście komparatora US1B jest zbuforowane takim samym wtórnikiem, co wyjście US1A. Rezystor R11 polaryzuje emiter tranzystora T2, umożliwiając mu poprawną pracę. Użytkownik ma zatem do dyspozycji wyjście o niewielkiej wydajności prądowej, lecz również o rezystancji dynamicznej. Może się ono nadawać do sterowania obciążeń o charakterze pojemnościowym.
Montaż i uruchomienie
Układ został zmontowany na jednostronnej płytce drukowanej o wymiarach 60×32 mm. Jej schemat został pokazany na rysunku 2.
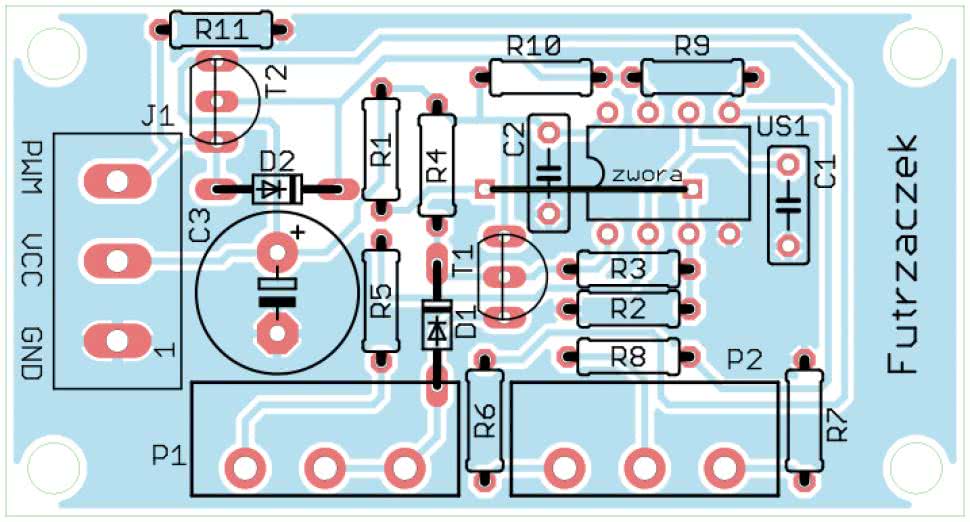
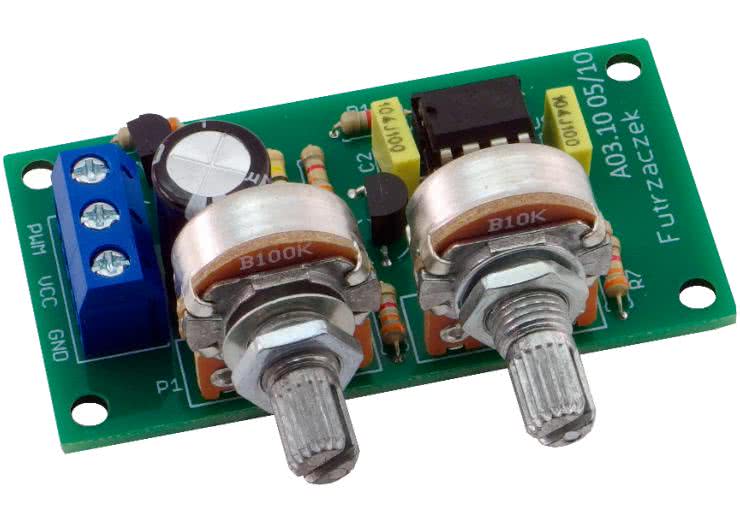
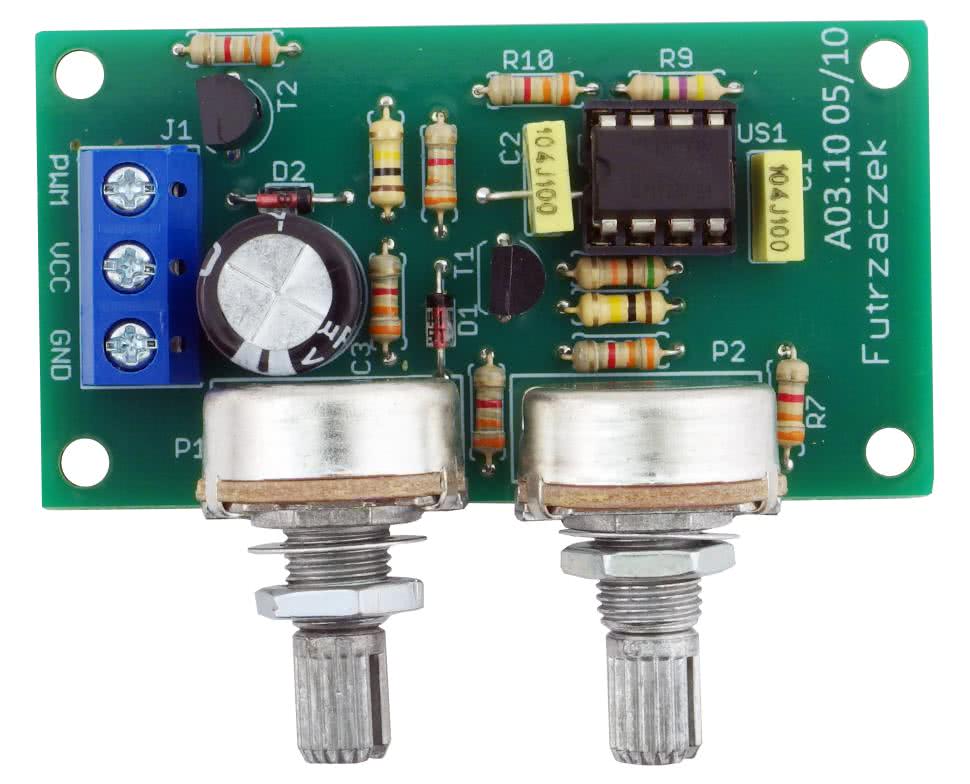
W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm. Montaż proponuję rozpocząć od zworki z cienkiego drutu, która znajduje się pod układem US1 i kondensatorem C2. Potem można przejść do wlutowania elementów o najmniejszej wysokości obudowy, czyli rezystorów i diod półprzewodnikowych. Pod układ scalony US1 proponuję zastosować podstawkę, aby ułatwić jego wymianę w razie ewentualnego uszkodzenia. W pełni zmontowany układ pokazuje fotografia 1.
Poprawnie zmontowany układ jest gotowy do działania po podaniu zasilania na zaciski GND i VCC złącza J1. Do zasilania powinno służyć napięcie stałe o wartości z przedziału 10…20 V. Dolne ograniczenie wynika z konieczności zapewnienia prawidłowej pracy stopniom wejściowym komparatorów, zaś górny z wytrzymałości napięciowej kondensatora C3. Pobór prądu przy 12 V nie przekracza wartości 10 mA przy nieobciążonym wyjściu.
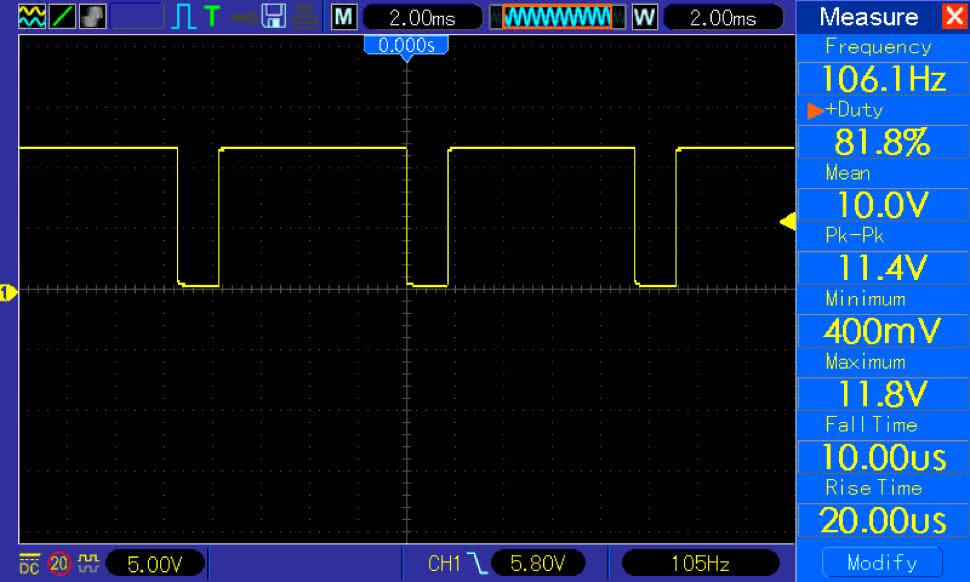
Również w takich warunkach wykonano testy układu prototypowego. Zmierzony przedział możliwej do uzyskania częstotliwości rozciąga się od 45 Hz do 1,25 kHz. Wypełnienie można zmieniać płynnie w zakresie od 0% (wyjście znajduje się w stanie niskim) do 100% (wyjście w stanie wysokim). Przykładowy przebieg czasowy, zarejestrowany między zaciskami GND i PWM złącza J1, można zobaczyć na rysunku 3. Można z niego odczytać, że wartość maksymalna napięcia wyjściowego jest niższa od zasilającego o zaledwie 0,2 V. W sygnale nie ma widocznych jakichkolwiek zniekształceń, które mogłyby zaburzać pracę układu sterowanego tym sygnałem.
Wykonano również pomiar czasu opadania i narastania, cały czas przy braku obciążenia na wyjściu. Pierwszy parametr osiągnął wartość zaledwie 75 ns, zaś drugi niewiele się od niego różnił, bo wyniósł 60 ns. Zbliżone wartości czasów przełączania wyjścia układu oraz gładkość uzyskanych zboczy, które nie mają jakichkolwiek dzwonień czy niemonotoniczności, świadczą o wysokiej jakości uzyskanego sygnału. Można go użyć, na przykład, do bezpośredniego sterowania tranzystorem MOSFET o niedużej pojemności wejściowej.
Wydajność prądowa wyjścia może, w teorii, sięgać kilkudziesięciu miliamperów, co jednak wiąże się z wydłużeniem czasów przełączania z uwagi na dłuższe przeładowywanie pojemności dynamicznych tranzystorów bipolarnych. Dlatego proponuję przyjąć, że prąd ciągły, jaki może płynąć przez wyjście tego układu, powinien wynosić pojedyncze miliampery - im mniej, tym lepiej.
Częstotliwość sygnału generowanego przez ten układ można łatwo zmienić poprzez wymianę kondensatora C1. Zwiększenie jego pojemności spowoduje proporcjonalny spadek częstotliwości, zaś zmniejszenie - wzrost. Jako górną częstotliwość graniczą dla tego układu można przyjąć około 50 kHz lub niewiele większą. Będzie ona dostępna po wymianie C1 na kondensator o pojemności około 2,2 nF. Powyżej tej częstotliwości czas przełączania wyjścia będzie na tyle znaczący, że uzyskany sygnał z trudem można byłoby nazwać prostokątnym, zwłaszcza przy małym wypełnieniu. Górny limit pojemności dla tego kondensatora nie występuje, mogą to być nawet setki mikrofaradów.
Michał Kurzela, EP
- R1, R2: 100 kΩ
- R3: 51 kΩ
- R4…R8, R10, R11: 3,3 kΩ
- R9: 4,7 MΩ
- P1: 100 kΩ potencjometr jednoobrotowy montowany do ścianki
- P2: 10 kΩ potencjometr jednoobrotowy montowany do ścianki
- C1: 100 nF raster 5 mm MKT (opis w tekście)
- C2: 100 nF raster 5 mm MKT
- C3: 1000 μF 25 V raster 5 mm
- D1, D2: 1N4148
- T1, T2: BC546
- US1: LM393 (DIP8)
- J1: ARK3/500
- Jedna podstawka DIP8