 Zaloguj
Zaloguj



- pomiar dwóch napięć stałych: dodatniego w zakresie 0…99,9 V oraz ujemnego w zakresie –99,9…0 V z rozdzielczością 0,1 V,
- wyświetlacz alfanumeryczny LCD 2×8 znaków,
- sygnalizacja przekroczenia zakresu,
- niezależna kalibracja obu kanałów,
- rezystancja wejściowa około 200 kΩ,
- masa zasilania połączona z masą napięć mierzonych,
- zasilanie napięciem stałym 9…30 V,
- pobór prądu około 23 mA przy napięciu 12 V.
Zasilacze laboratoryjne, zasilacze układów analogowych albo układy wzmacniaczy audio – w tych miejscach można spotkać się z symetrycznymi napięciami zasilającymi. Uściślając: one powinny takie być, jeżeli wszystko działa poprawnie. Niestety, tak się czasem nie dzieje, a do zdiagnozowania przydaje się pomiar tych napięć.
Jeden woltomierz i ciągłe przepinanie jego końcówek wprowadza dużo zamieszania. Dwa woltomierze to jeszcze więcej bałaganu. Można to wszystko uprościć poprzez użycie kompaktowego modułu, który mierzy dwa napięcia – dodatnie i ujemne – jednocześnie, a wynik pokazuje na zgrabnym i czytelnym wyświetlaczu LCD.
Budowa i działanie
Schemat ideowy omawianego układu znajduje się na rysunku 1. Napięcie zasilające należy podłączyć do zacisków złącza J1. Jest ono filtrowane przez kondensatory C1 i C2, zaś dioda D1 chroni układ przed uszkodzeniem w razie odwrotnego podłączenia źródła zasilania. Tym napięciem zasilany jest wzmacniacz operacyjny US2 oraz prosty stabilizator liniowy.
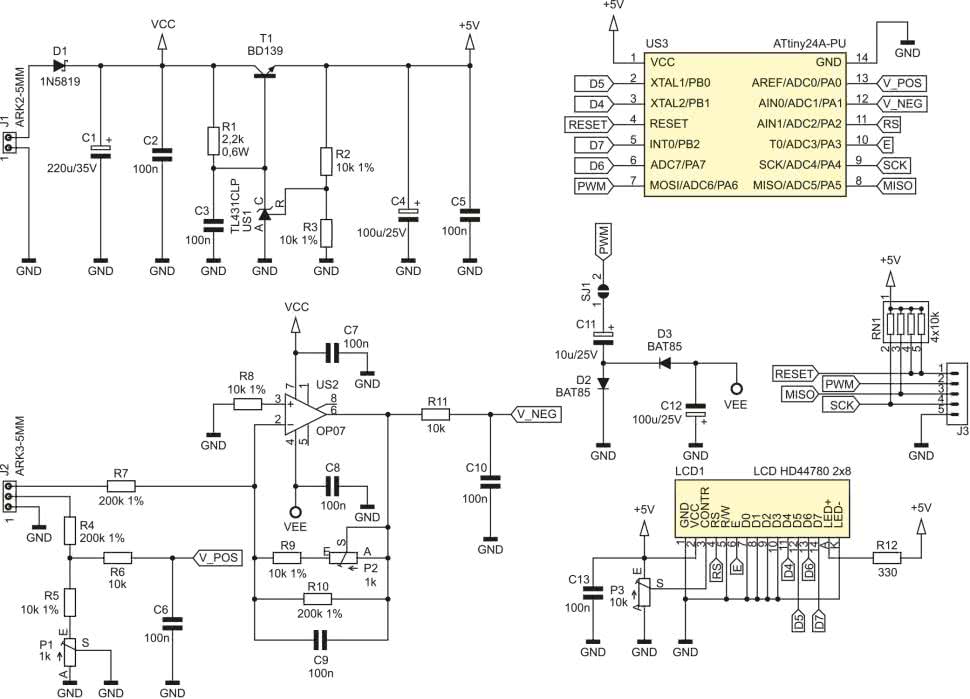
W skład stabilizatora wchodzi popularne, regulowane źródło napięcia odniesienia typu TL431 (US1), tranzystor T1 pełniący funkcję wtórnika napięcia, trzy rezystory i kondensator. R1 polaryzuje układ US1 i bazę tranzystora T1, dostarczając im niezbędnego do działania prądu o niewielkim natężeniu, lecz większym od minimalnego przewidzianego dla TL431 (1 mA). R2 i R3 tworzą dzielnik napięcia wyjściowego, dostarczając w ten sposób układowi TL431 sygnału sprzężenia zwrotnego. Napięcie wyjściowe wynosi 5 V z niewielką możliwą odchyłką. Kondensator C3 zapobiega wzbudzeniu się układu napięcia źródła odniesienia.
Dlatego zastosowano taki układ zamiast zwykłego stabilizatora 7805, który kosztuje przysłowiowe grosze? Otóż to urządzenie ma służyć do cyfrowego pomiaru napięcia i w związku z tym potrzebuje napięcia referencyjnego dla przetwornika analogowo-cyfrowego. Nie jest konieczna znajomość dokładnej wartości tego napięcia – układ będzie działał niezależnie, czy wyniesie ono 4,97 V, czy też 5,04 V, ponieważ istnieje możliwość kalibracji wskazań. Istotniejsza jest stabilność tego napięcia w funkcji upływającego czasu oraz zmian temperatury, a z tym u popularnego 7805 nie jest najlepiej. Dlatego cała część cyfrowa układu jest zasilana takim właśnie układem, który zawiera wprawdzie kilka elementów więcej, za to wykazuje znacznie lepszą stabilność. A to w mierniku jest rzecz bardzo cenna: aby raz zadane nastawy były pewne przez długi czas jego eksploatacji, a nie rozjeżdżały się co chwilę.
Innym rozwiązaniem byłoby użycie 7805 do zasilenia części cyfrowej układu i podłączenie źródła napięcia referencyjnego wprost do odpowiedniego wejścia przetwornika A/C. Tyle że to nie oznaczałoby użycia znacząco mniejszej liczby elementów, byłoby ich z grubsza tyle samo.
Mierzone napięcia należy podłączyć do zacisków złącza J2. Masa tych napięć oraz masa napięcia zasilającego układ są połączone ze sobą. Co więcej, nie ma przeciwwskazań aby zasilać układ mierzonym napięciem dodatnim (środkowy zacisk złącza J2), o ile mieści się ono w zakresie dopuszczalnym dla tego urządzenia.
Napięcie dodatnie jest dzielone przy użyciu dzielnika oporowego. Jedną jego rezystancją jest R4, a drugą wypadkowa rezystancja połączenia szeregowego R5 z P1. Napięcie wejściowe (maksymalnie 99,9 V) ma zostać podzielone w takim stosunku, aby przy maksymalnym napięciu zasilającym na wyjściu 10-bitowego przetwornika A/C z napięciem referencyjnym 5 V pojawiła się wartość 999. Wtedy pozostałe kwanty (z przedziału 1000…1023) byłyby przeznaczone na sygnalizację przekroczenia zakresu, a dodatkowo obsługa pomiarów przez mikrokontroler stałaby się bardzo prosta: jeden kwant odpowiada 0,1 V. To wszystko oznacza, że napięcie wyjściowe dzielnika dla maksymalnego napięcia wyjściowego musi wynosić:
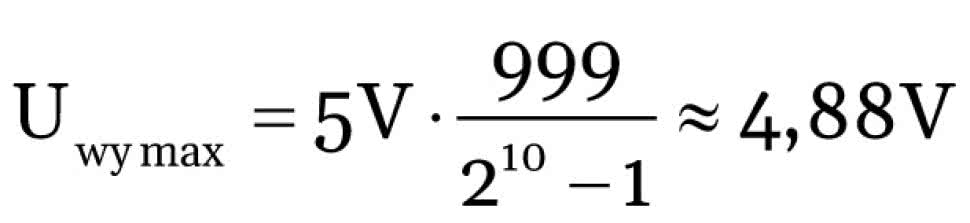
Aby tak się stało, stosunek R4 do R5+P1 musi wynosić:
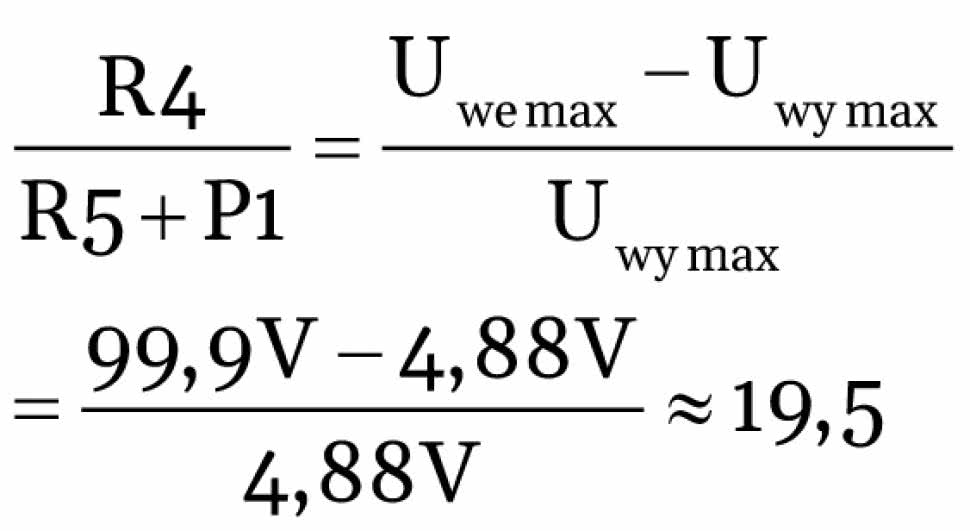
Jeżeli założymy wartość R4=200 kΩ, wtedy R5+P1 powinna (w idealnym przypadku) wynosić około 10,3 kΩ. Dlatego zastosowanie R4=10 kΩ i P1=1 kΩ daje pewną możliwość regulacji, a jednocześnie układ zawiera typowe elementy z szeregu E24.
Podobnie wygląda sprawa z pomiarem napięcia ujemnego, tyle że został tam zastosowany wzmacniacz operacyjny US2 typu OP07 o bardzo niskim napięciu niezrównoważenia. Został skonfigurowany do pracy jako wzmacniacz odwracający o wzmocnieniu mniejszym od jedności. Dokładnej jego wzmocnienie można doregulować potencjometrem P2, aby napięcie wyjściowe wynosiło 4,88 V w sytuacji, kiedy na wejściu układu poda się napięcie –99,9 V. Rezystor R8 kompensuje wpływ prądów polaryzujących wejścia tego wzmacniacza operacyjnego.
Aby pomiary przebiegały bez zakłóceń, dodano filtrację mierzonego napięcia. Oprócz cyfrowego algorytmu uśredniania, zaszytego w mikrokontrolerze, postawiono również na dolnoprzepustową filtrację analogową. Realizują to układy R6+C6 i R11+C10. Dodatkowo kondensator C9 zawęża pasmo pracy obwodu odwracającego znak mierzonego napięcia ujemnego, co sprzyja tłumieniu zakłóceń i poprawie jego stabilności.
W opisanej wyżej części analogowej układu proponuję zastosować rezystory metalizowane o tolerancji 1% zamiast zwykłych, węglowych rezystorów cechujących się tolerancją 5%. Powodem jest stabilność parametrów w funkcji upływającego czasu i zmian temperatury.
Wzmacniacz operacyjny OP07 do poprawnej pracy wymaga minimum 3 V marginesu między napięciami wejściowymi i napięciem wyjściowym a napięciami zasilającymi. O ile z napięciem dodatnim nie ma problemu – naddatek to 4 V lub lepiej – o tyle uzyskanie na wyjściu 0 V byłoby niemożliwe, gdyby nóżkę 4 tego układu podłączyć do masy.
Dlatego na płytce znalazło się miejsce na prosty obwód wytwarzający na swoim wyjściu napięcie ujemne o wartości około –3,6 V. Kondensatory C11 i C12 oraz diody D2 i D3 wytwarzają niestabilizowane napięcie ujemne po podaniu na wejście sygnału prostokątnego o wysokiej częstotliwości na linię PWM. Ten sygnał generuje mikrokontroler przy użyciu jednego ze swoich liczników. Częstotliwość tego sygnału wynosi około 40 kHz, co jest wartością leżącą znacząco poza pasmem słyszalnym przez nasze uszy, a także poza częstotliwością odcięcia filtru R11+C10.
Układ nie zawiera elementów zabezpieczających wejścia przed skutkami podania na nie zbyt wysokiego napięcia. Jedynymi elementami, które mogłyby wtedy ucierpieć, są rezystory – głównie R4 i R7. Mikrokontroler jest chroniony przez rezystancję szeregową filtrów dolnoprzepustowych, czyli R6 i R11, które ograniczają natężenie prądu diod zabezpieczających wejścia przetwornika analogowo-cyfrowego.
Do zaprogramowania mikrokontrolera można użyć złącza J3, na które wyprowadzono linie sygnałowe niezbędne do zrealizowania programowania w systemie (ISP). Rezystory zawarte w drabince RN1 podciągają nieużywane wyprowadzenia do dodatniej linii zasilania, aby ustalić ich potencjał i odprowadzać ewentualne ładunki elektrostatyczne. Wyjątkiem jest linia MOSI (oznaczona etykietą PWM), która jest jednocześnie wyjściem modułu Output Compare, generującego sygnał PWM. Na czas programowania warto rozewrzeć pole lutownicze SJ1, zaś potem połączyć je kroplą spoiwa lutowniczego. Pojemność kondensatora C11 może zaburzać pracę programatora.
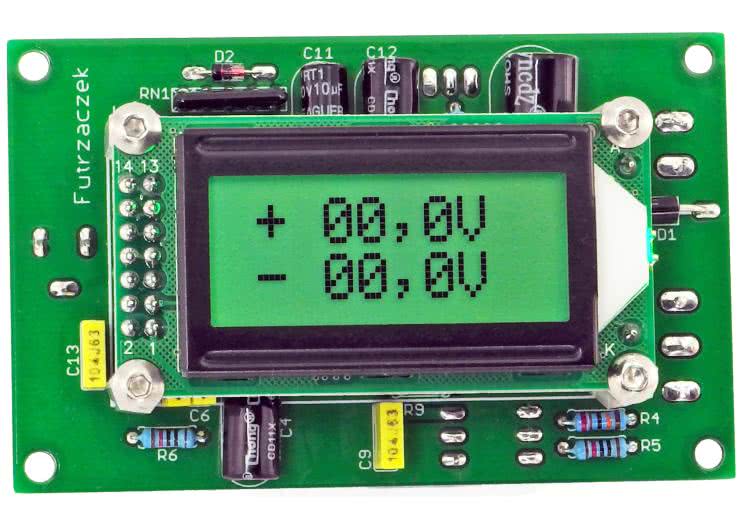
Wyniki są prezentowane na bieżąco przy użyciu prostego wyświetlacza alfanumerycznego LCD o organizacji 2 wiersze po 8 kolumn. Jego kontrast reguluje się potencjometrem P3. Rezystor R12 ogranicza prąd diody podświetlającej, co zmniejsza pobór mocy i nie powoduje zmęczenia wzroku zbyt jaskrawym światłem.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 80×50 mm, której schemat został pokazany na rysunku 2.
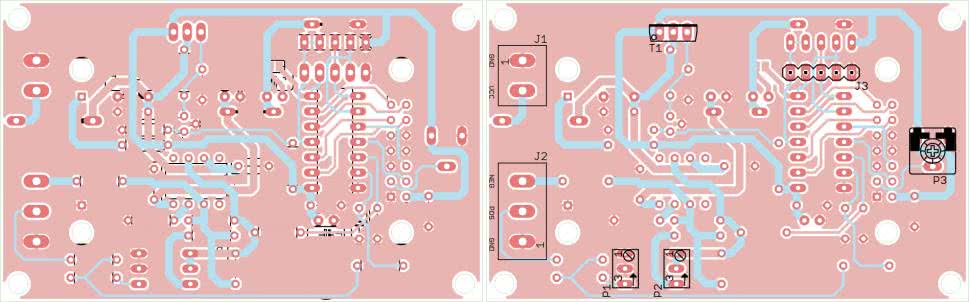
W odległości 3 mm od krawędzi płytki znalazły się cztery otwory montażowe, każdy o średnicy 3,2 mm. Montaż proponuję rozpocząć od elementów o najmniejszej wysokości obudowy, które znajdują się na wierzchniej stronie płytki, czyli rezystorów i diod. Będą znajdowały się pod wyświetlaczem. Kondensatory elektrolityczne należy przylutować tak, aby dało się je położyć na powierzchni płytki. Pod układy scalone proponuję zastosować podstawki. Ten etap montażu można zobaczyć na fotografii 1.
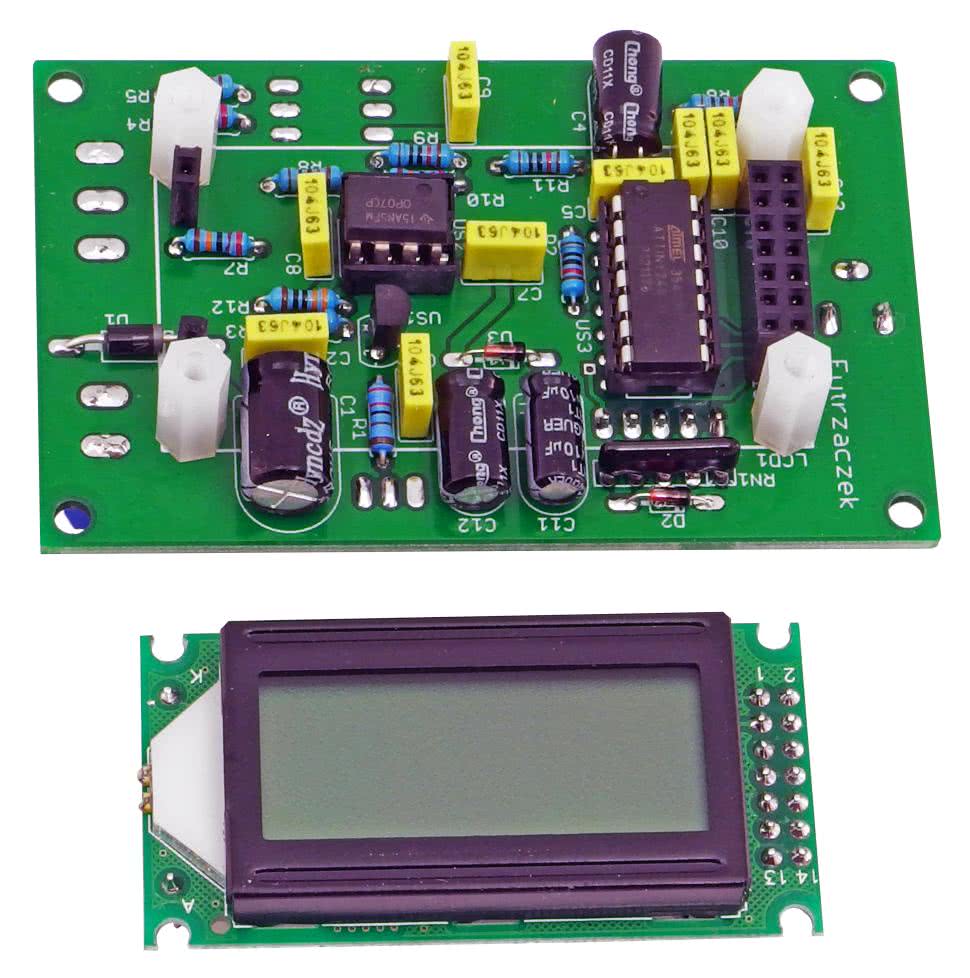
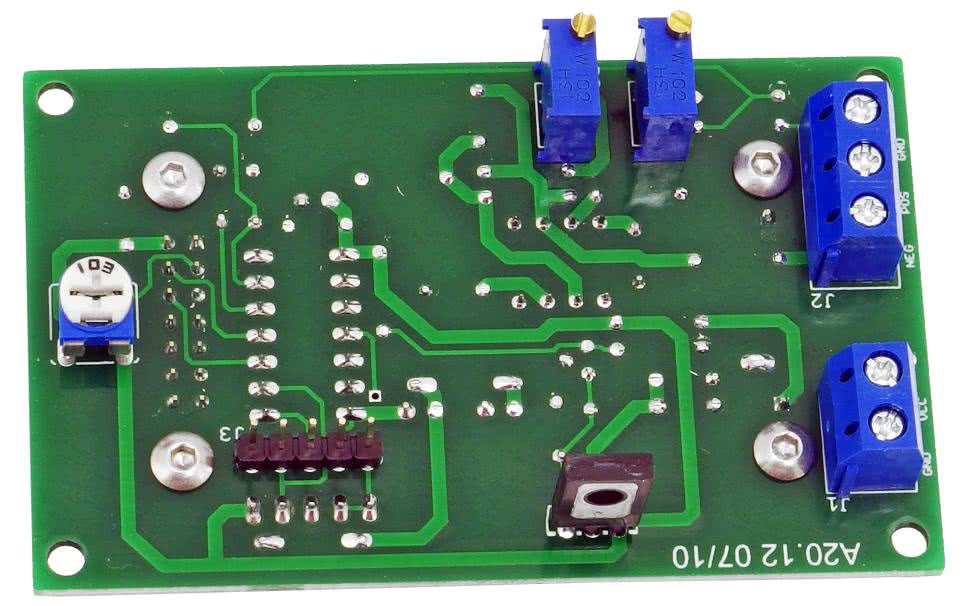
Na drugiej stronie płytki jest miejsce dla złączy, potencjometrów i tranzystora T1. Ich lokalizację po przylutowaniu przedstawia fotografia 2. Na samym końcu należy przykręcić wyświetlacz LCD za pomocą czterech tulei dystansowych oraz przylutować jego złącza. Warto lutowanie zostawić na sam koniec, po przykręceniu, aby ewentualny naddatek wysokości tulei mógł być skompensowany przez lekkie wystawanie złączy z powierzchni płytki – by część męska i żeńska wchodziły w siebie całkowicie. Zmontowany układ można zobaczyć na fotografii tytułowej.
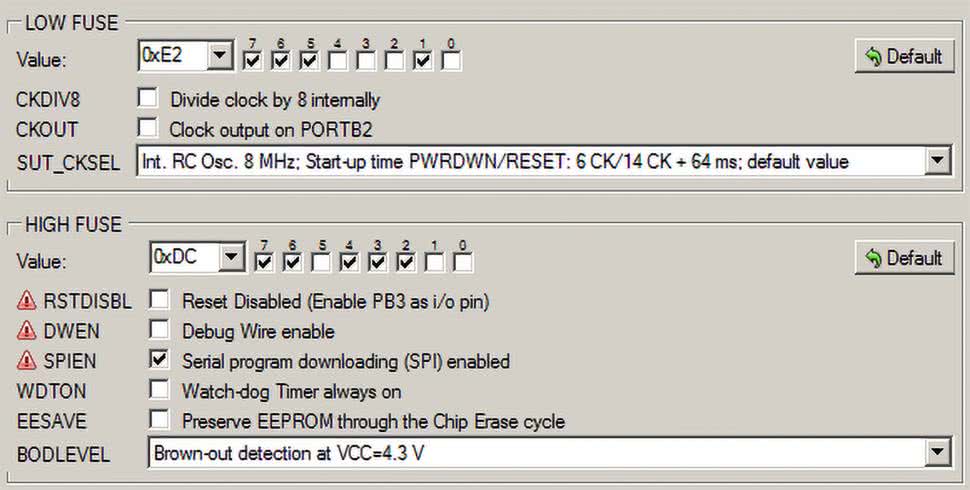
Na etapie uruchamiania jest konieczne zaprogramowanie pamięci Flash mikrokontrolera dostarczonym wsadem oraz zmiana jego bitów zabezpieczających. Oto ich nowe wartości:
Low Fuse = 0xE2
High Fuse = 0xDC
Szczegóły są widoczne na rysunku 3, który zawiera widok okna konfiguracji tych bitów z programu BitBurner. W ten sposób zostanie wyłączony preskaler sygnału zegarowego oraz włączy się Brown-Out Detector, który wprowadzi mikrokontroler w stan zerowania, jeżeli jego napięcie zasilające spadnie poniżej 4,3 V. To znacznie zmniejsza ryzyko zawieszenia się układu podczas uruchamiania.
Poprawnie zaprogramowany układ jest gotowy do działania po ustawieniu kontrastu wyświetlacza potencjometrem P3 i skalibrowaniu wskazań dla kanału dodatniego i ujemnego, odpowiednio potencjometrami P1 i P2. Jeżeli napięcie wejściowe w danym kanale będzie wynosiło 100 V lub więcej, w danym wierszu pojawi się napis OVER.
Układ powinien być zasilany napięciem stałym z przedziału 9…30 V. Powinno być dobrze filtrowane, najlepiej stabilizowane dla zmniejszenia amplitudy tętnień. Pobór prądu przy 12 V wynosi około 23 mA. Jeżeli napięcie zasilające wynosiłoby 24 V lub więcej, polecam przykręcić do tranzystora T1 niewielki radiator.
Michał Kurzela, EP
- R1: 2,2 kΩ 0,6 W
- R2, R3, R5, R8, R9: 10 kΩ 1%
- R4, R7, R10: 200 kΩ 0,6 W 1%
- R6, R11: 10 kΩ 0,25 W
- R12: 330 Ω 0,25 W
- RN1: 4×10 kΩ SIL5
- P1, P2: 1 kΩ montażowy pionowy 3296W
- P3: 10 kΩ montażowy leżący jednoobrotowy
- C1: 220 μF 35 V raster 3,5 mm
- C2, C3, C5…C10, C13: 100 nF raster 5 mm MKT
- C4, C12: 100 μF 25 V raster 2,5 mm
- C11: 10 μF 25 V raster 2,5 mm
- D1: 1N5819
- D2, D3: BAT85
- T1: BD139
- LCD1: 2×8, zgodny z HD44780
- US1: TL431CLP (TO92)
- US2: OP07 (DIP8)
- US3: ATtiny24A-PU (DIP14)
- J1: ARK2/500
- J2: ARK3/500
- J3: goldpin 5 pin męski 2,54 mm THT
- Jedna podstawka DIP14
- Jedna podstawka DIP8
- Złącze męskie i żeńskie goldpin 2×7 pin 2,54 mm
- Dwa złącza męskie i żeńskie goldpin 1 pin 2,54 mm
- Cztery tuleje dystansowe, gwint wewnętrzny M3 12 mm poliamid
- Osiem śrub M3 6 mm
- Mały radiator TO220 (opcjonalnie, opis w tekście)












