Zaloguj
Zaloguj




- regulacja poprzez modulację PWM w zakresie od 0 do 100%,
- automatyczna zmiana polaryzacji napięcia wyjściowego,
- obsługa jednym pokrętłem: położenie środkowe wyłącza silnik, skręcenie w bok powoduje ruch w zadanym kierunku,
- częstotliwość sygnału PWM: ok. 600 Hz,
- maksymalny prąd wyjściowy: 4 A,
- zasilanie napięciem stałym z zakresu 9…18 V, typowo 12 V.
Obsługa suwnicy, wciągarki, ramienia czy innej maszyny tego typu wymaga od jej operatora precyzyjnego sterowania elementem napędowym w obie strony. Musi mieć możliwość jego przyspieszenia, zwolnienia oraz płynnej zmiany kierunku obrotów silnika, który jest elementem wykonawczym. Dlatego regulator PWM do silników prądu stałego wydaje się idealny.
Ale obsługa maszyny, w której jedno pokrętło służy jako regulator prędkości obrotowej, a drugi podzespół (np. przełącznik) odpowiada za zmianę kierunku obrotów jest niewygodne i nieintuicyjne. Lepiej byłoby mieć tylko jedno pokrętło, które przekręcamy w lewo lub w prawo – im większy kąt obrotu, tym szybciej porusza się nasz mechanizm. Powrót gałki do położenia neutralnego powoduje zatrzymanie silnika.
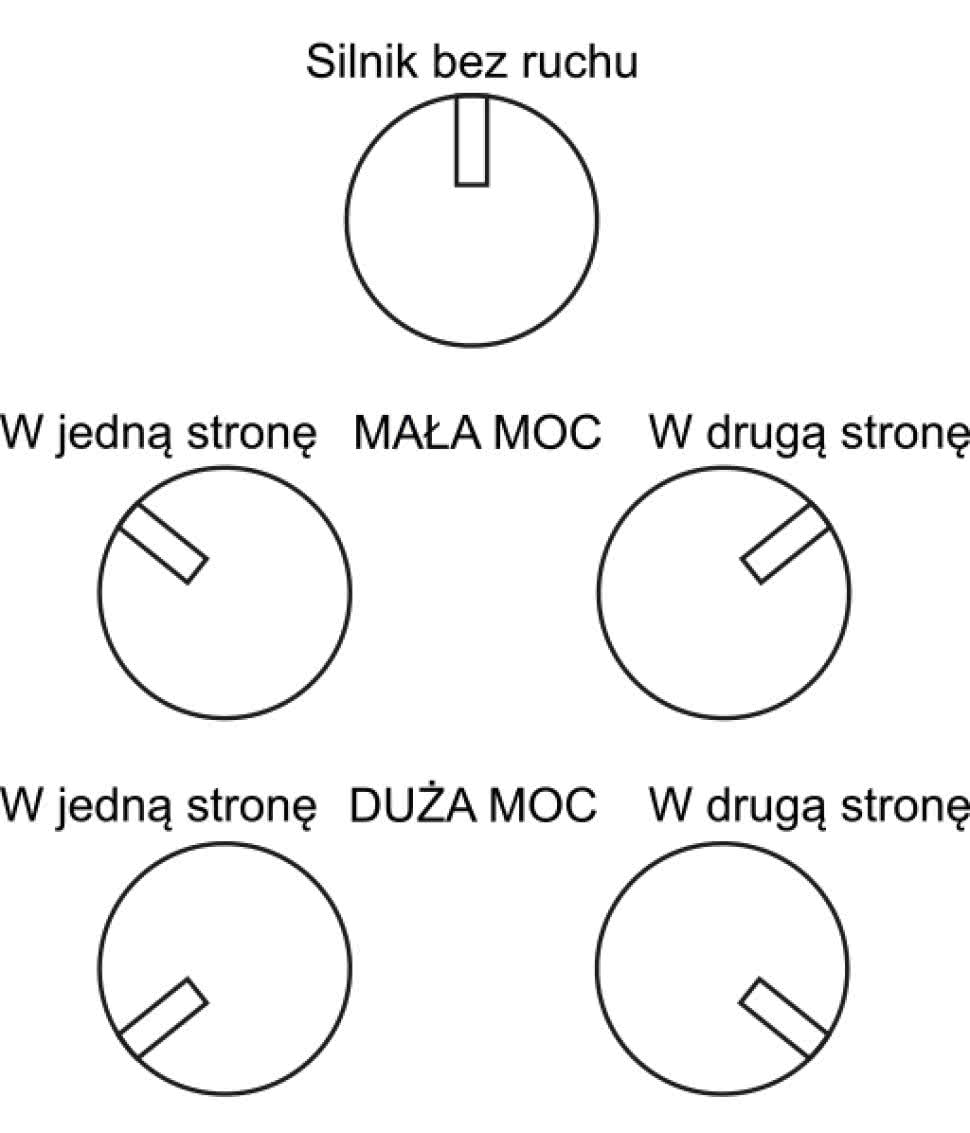
Właśnie do realizacji tego typu sterowania służy opisany układ. Operator trzyma w dłoni tylko jeden element, jakim jest pokrętło potencjometru, a elektronika odpowiada za zmianę kierunku obrotów silnika oraz jego przyspieszanie i zwalnianie. Zasadę działania tego układu, a dokładniej sposób reagowania na kąt obrotu osi potencjometru, pokazano na rysunku 1.
Budowa i działanie
Schemat ideowy regulatora został pokazany na rysunku 2. Główną rolę odgrywa w nim mikrokontroler ATtiny13, którego parametry są wystarczające do tego zastosowania. Do zaprogramowania pamięci programu można użyć złącza J1, na które wyprowadzono wszystkie sygnały niezbędne przy programowaniu ISP (In-System Programming). Rezystory drabinki RN1 ustalają potencjały sygnałów w momencie, kiedy nie są używane.
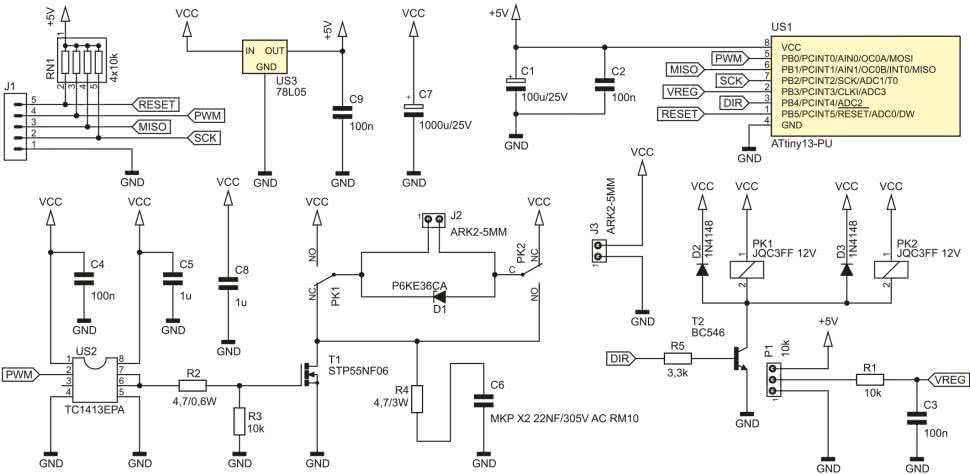
Do odczytu kąta obrotu potencjometru służy przetwornik analogowo-cyfrowy mikrokontrolera, który mierzy pojawiające się na ślizgaczu napięcie. Sam potencjometr został włączony do układu jako dzielnik napięcia zasilającego mikrokontroler, które wynosi około 5 V. Jednak potencjał ślizgacza może ulegać pewnym fluktuacjom względem masy układu, do czego mogą przyczyniać się zarówno zakłócenia elektromagnetyczne, jak i niedoskonałości samego elementu mechanicznego. Z tego powodu między potencjometrem a wejściem przetwornika został włączony bardzo prosty filtr RC, złożony z rezystora R1 i kondensatora C3, który tę niepożądaną składową tłumi.
Regulacja PWM sygnałem wygenerowanym przez mikrokontroler odbywa się poprzez kluczowanie tranzystora MOSFET z kanałem typu N. Do sterowania jego bramką został użyty specjalizowany driver. Rezystor R2 ogranicza prąd bramki w momencie przeładowywania oraz nieco wydłuża ten proces, aby ograniczyć natężenie zakłóceń elektromagnetycznych wywoływanych przez przełączaną indukcyjność uzwojenia silnika. Temu samemu służy gasik, w skład którego wchodzą elementy R4 i C6.
Zmiana kierunku obrotów silnika odbywa się poprzez przełączenie styków przekaźników PK1 i PK2. W położeniu spoczynkowym prawy zacisk złącza J2 ma potencjał dodatni, a lewy zerowy. Przestawienie obu zestyków jednocześnie zamienia biegunowość. To bardzo proste rozwiązanie niweluje konieczność stosowania w układzie pełnego mostka H, który wprowadzałby więcej strat i generował problemy ze sterowaniem wszystkich czterech tranzystorów wchodzących w jego skład. Tutaj pojedynczy tranzystor steruje mocą silnika (od 0 do 100%), a przekaźniki zmieniają kierunek obrotów wału. Dioda D1 ogranicza amplitudę powstających przepięć, aby nie doszło do uszkodzenia tranzystora T1.
Cewki przekaźników PK1 i PK2 nie wymagają szczególnego sterowania. Wystarczy zwykły klucz na niemal dowolnym tranzystorze bipolarnym jak BC546, aby mikrokontroler mógł je załączać. Diody zabezpieczające, D2 i D3, zostały umieszczone przy każdej cewce przekaźnika, aby długość drogi prądu wynikającego z samoindukcji była możliwie krótka.
Silnik, driver tranzystora MOSFET i cewki przekaźników są zasilane wprost z napięcia zasilającego cały układ, co nakłada na jego wartość pewne ograniczenia – o czym dalej. Z kolei mikrokontroler otrzymuje napięcie stabilizowane przez układ US3. Moc strat w nim wydzielana jest na tyle mała, że użycie w tej roli przetwornicy impulsowej mijałoby się z celem.
Montaż i uruchomienie
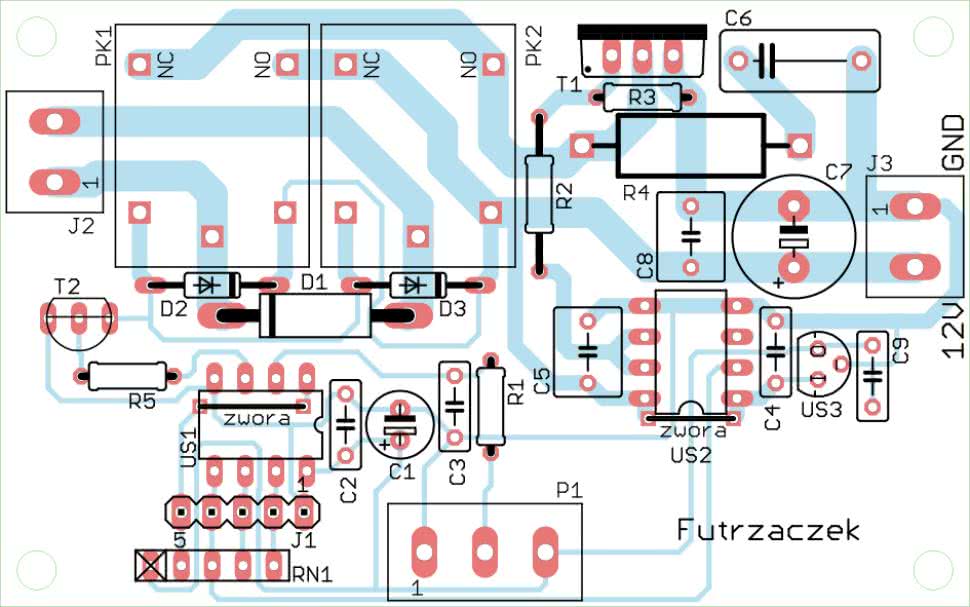
Układ został zmontowany na jednostronnej płytce drukowanej o wymiarach 80×50 mm. Jej schemat został pokazany na rysunku 3. W odległości 3 mm od krawędzi płytki znalazły się otwory montażowe, każdy o średnicy 3,2 mm. Montaż proponuję rozpocząć od dwóch zworek z cienkiego drutu oraz elementów o najmniejszej wysokości obudowy. Pod układy scalone warto zastosować podstawki, zwłaszcza pod mikrokontroler US1, aby łatwiej było go wymienić w razie ewentualnego uszkodzenia. Zmontowana płytka jest widoczna na fotografii tytułowej.
Maksymalny prąd pobierany przez silnik może wynosić około 4 A i to ograniczenie wnika z szerokości ścieżek znajdujących się na powierzchni obwodu drukowanego. Tranzystor T1 ma stosunkowo małą rezystancję otwartego kanału (około 15 mΩ) i większość strat w nim wynika z niezerowego czasu przełączania. Przy przepływie prądu o natężeniu do ok. 2 A nie jest wymagane jego dodatkowe chłodzenie, a dla większych polecam przykręcić go do niewielkiego radiatora. Można też użyć innego, tańszego tranzystora o tym samym rozstawie wyprowadzeń (np. IRF530), godząc się z koniecznością zapewnienia mu lepszego chłodzenia.
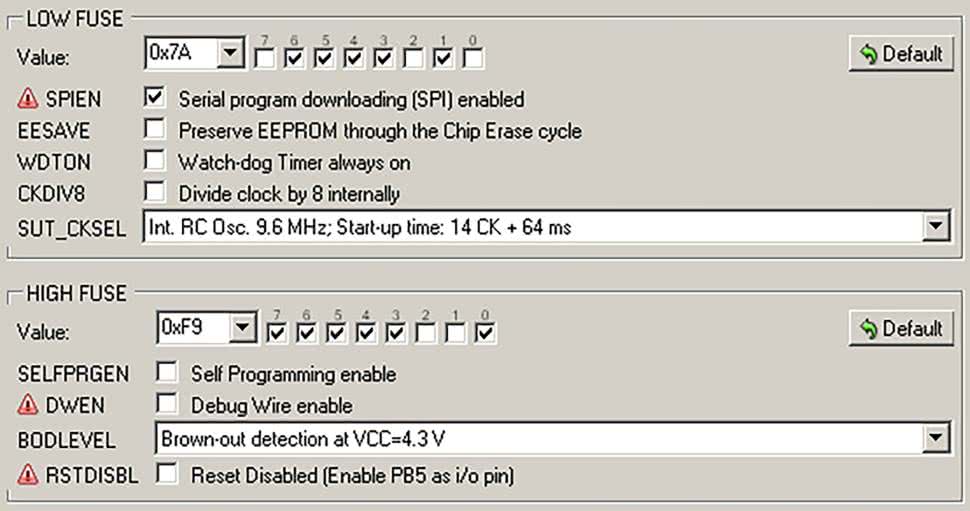
W ramach czynności uruchomieniowych należy ustawić bity zabezpieczające mikrokontrolera ATtiny13 na wartosci: Low Fuse = 0x7A, High Fuse = 0xF9. Spowoduje to wyłączenie wbudowanego dzielnika częstotliwości sygnału zegarowego przez 8 oraz uruchomienie obwodu Brown-Out Detector, który będzie monitorował napięcie zasilające mikrokontroler i wyłączy go, jeżeli napięcie zasilania spadnie poniżej 4,3 V. Szczegóły znajdują się na rysunku 4. Trzeba również zaprogramować pamięć Flash dostarczonym wsadem w postaci pliku hex.
Obie wskazane wyżej czynności można wykonać w dwojaki sposób. Jednym z nich jest włożenie mikrokontrolera w podstawkę programatora, a potem przełożenie do układu. Natomiast drugi wariant polega na podłączeniu programatora typu ISP (np. bardzo popularnego USBASP) do złącza J1, na które zostały wyprowadzone odpowiednie sygnały.
Zasilanie układu wymaga podania napięcia stałego o wartości około 12 V (lub z przedziału 9…18 V). Dolna granica wynika z konieczności prawidłowego sterowania tranzystorem MOSFET. Górny limit napięcia zasilającego układ to efekt troski o izolację podbramkową tego elementu oraz wytrzymałość cewek przekaźników. Tym samym napięciem jest też zasilany sterowany silnik. Pobór prądu przez układ nie przekracza 60 mA przy zasilaniu napięciem 12 V.
Potencjometr P1 nie musi być obrotowy, można z równie dobrym skutkiem użyć suwakowego. Pola lutownicze pod potencjometr zostały tak dobrane, że pasują pod listwę zaciskową ARK3/500, do której można potem wygodnie przykręcić przewody łączące płytkę z potencjometrem, jeżeli ma się on znajdować poza jej obrysem.
Częstotliwość sygnału PWM, który steruje mocą dostarczaną do silnika, wynosi około 600 Hz. Teoretycznie powinna wynosić 586 Hz, lecz dokładna wartość zależy od temperatury i rozrzutów między poszczególnymi egzemplarzami mikrokontrolerów. Z tego powodu może być słyszalne piszczenie uzwojeń silnika w trakcie jego pracy, zwłaszcza z niskim wypełnieniem (przy małej mocy).
Michał Kurzela, EP
- R1, R3: 10 kΩ 0,25 W
- R2: 4,7 Ω 0,6 W
- R4: 4,7 Ω 3 W
- R5: 3,3 kΩ 0,25 W
- RN1: 4×10 kΩ SIL5
- P1: 10 kΩ liniowy, jednoobrotowy, do obudowy (opis w tekście)
- C1: 100 μF 25 V raster 2,5 mm
- C2…C4, C9: 100 nF raster 5 mm MKT
- C5, C8: 1 μF raster 5 mm MKT
- C6: MKP X2 22NF/305V AC RM10
- C7: 1000 μF 25 V raster 5 mm
- D1: P6KE36CA
- D2, D3: 1N4148
- T1: STP55NF06 (opis w tekście)
- T2: BC546 lub podobny
- US1: ATtiny13-PU (DIP8)
- US2: TC1413EPA (DIP8)
- US3: 78L05 (TO92)
- J1: goldpin 5 pin męski 2,54 mm THT
- J2, J3: ARK2/500
- PK1, PK2: JQC3FF 12 V SPDT
- Dwie podstawki DIP8
- Dwie zworki z drutu