Zaloguj
Zaloguj




- współpraca z sieciami prądu sinusoidalnie zmiennego o częstotliwości 50 lub 60 Hz,
- poprawna praca z prądem o wartości skutecznej 0,3…20 A,
- wyjście typu „otwarty kolektor” z wbudowanym rezystorem podciągającym,
- zasilanie napięciem 9…30 V.
Zrealizowanie sterowania fazowego obciążenia innego niż rezystancyjne wymaga informacji o przesunięciu fazowym między prądem i napięciem, jakie dane obciążenie wprowadza. Sytuacja komplikuje się, kiedy dane obciążenie zmienia kąt przesunięcia fazowego wskutek np. zmian obciążenia wału silnika. Jeszcze trudniejsza sytuacja ma miejsce, kiedy nie wiadomo co będzie sterowane danym triakiem lub parą tyrystorów, gdyż budowany moduł ma być uniwersalną częścią składową dla innych urządzeń.
Jedynym rozwiązaniem jest wykrywanie przejścia przez zero prądu, a nie napięcia i sterowanie triakiem w odniesieniu do tego sygnału. Metoda polegająca na pomiarze spadku napięcia na rezystorze nie zapewnia izolacji galwanicznej i wprowadza dodatkowy element wydzielający ciepło, które trzeba rozproszyć. Dlatego w tym projekcie został użyty przekładnik prądowy – element niedrogi i dobrze spełniający swoje zadanie.
Dodatkowy układ elektroniczny przekładnika prądowego przekształca pobrany sygnał analogowy na postać cyfrową. Zbocza tego sygnału (narastające i opadające) odpowiadają momentom zmiany znaku przez prąd płynący w nadzorowanym obwodzie, co ułatwia realizację sterownika na mikrokontrolerze. Wystarczy w tym celu obsługiwać przerwania od zmiany stanu logicznego na wybranym porcie.
Budowa i działanie
Schemat ideowy został pokazany na rysunku 1. Prąd indukujący się w uzwojeniu przekładnika prądowego CT1 powoduje powstawanie napięcia na zaciskach rezystora R1. Owe napięcie będzie w fazie z prądem, ponieważ rezystor SMD można uznać za element bezindukcyjny dla prądu o częstotliwości rzędu dziesiątek herców.

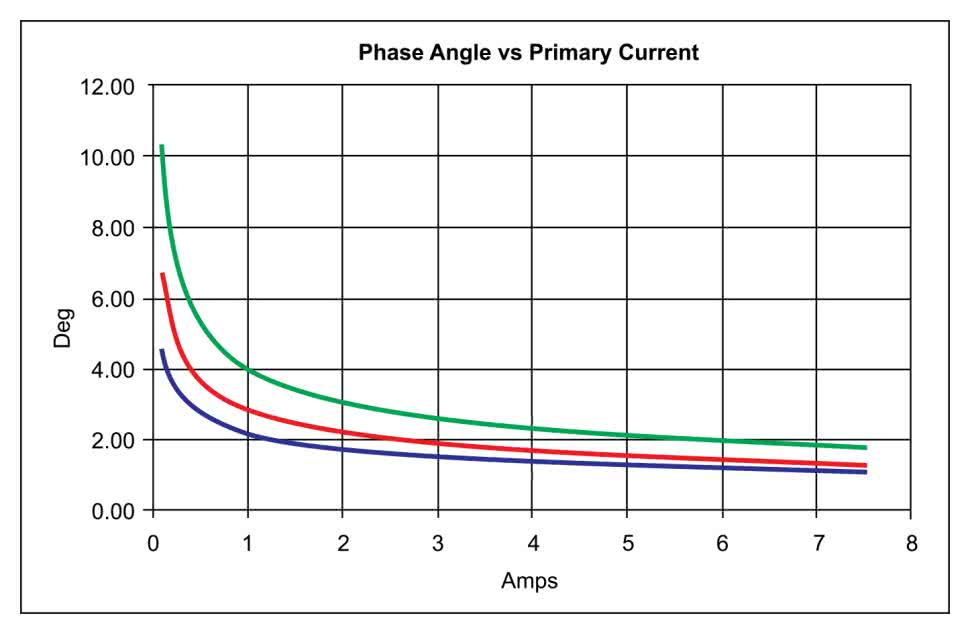
Wynika z tego, że informacja o aktualnym natężeniu prądu płynącego przez przewód przewleczony w przekładniku jest zamieniana na napięcie odkładające się na R1. Przekładnik jednak nie jest elementem idealnym i sam wprowadza niewielkie przesunięcie fazowe, co można odczytać z wykresu na rysunku 2. Wybranie rezystora 100 Ω jest kompromisem pomiędzy czułością układu (czyli poprawnym działaniem detekcji przy niskich prądach) a wprowadzanym przesunięciem fazowym.
Minimalna wartość skuteczna prądu określana na 0,3 A wynika z konieczności dostatecznie silnego wysterowania układu różnicowego, który znajduje się na wejściu komparatora US1. Amplituda napięcia na jego wejściu wyniesie wtedy 56 mV, co można już uznać za wielkosygnałową pracę układu różnicowego o nieposzerzonej strefie przejściowej. Wtedy przełączanie się zawartych w jego strukturze tranzystorów jest najszybsze z możliwych, co zmniejsza wprowadzane opóźnienie.
Wartość maksymalna natężenia prądu, którą określiłem na 20 A, wynika z ciepła wydzielającego się w elementach. Jest to też prąd na tyle wysoki, że z powodzeniem może służyć do zasilania wielu jednofazowych urządzeń, takich jak silniki czy transformatory.
Maksymalną wartość międzyszczytową napięcia, jakie może zostać przyłożone do wejścia komparatora US1, ograniczają diody D1 i D2. Utrata informacji o amplitudzie nie stanowi problemu, ponieważ najistotniejszy i tak jest moment zmiany znaku napięcia, kiedy to obie diody są zatkane.
Rezystor R2 ogranicza prąd przez nie płynący, co ma znaczenie szczególnie przy ochronie wejścia komparatora przed silnymi zakłóceniami typu szpilkowego, które powstać mogą np. w momencie zwarcia w nadzorowanym obciążeniu. Jednocześnie, mała rezystancja R2 wprowadza pomijalnie małe opóźnienie w przeładowywaniu pojemności diod.
Wyjście komparatora jest podciągane przez rezystor R3 do dodatniej linii zasilania, dzięki czemu na wyjściu obserwujemy dwustanowy sygnał cyfrowy. Sygnał ten można przyłożyć bezpośrednio do wejścia mikrokontrolera (zasilanego niskim napięciem) posiadającego wbudowane diody zabezpieczające na wejściu, gdyż ograniczą one napięcie stanu wysokiego do bezpiecznej wartości.
Prawidłowa praca układu różnicowego, który znajduje się na wejściu komparatora, nie byłaby możliwa bez prawidłowego spolaryzowania baz jego tranzystorów składową wspólną o odpowiedniej wartości. Dlatego jeden z zacisków przekładnika prądowego został połączony z dzielnikiem napięcia zasilającego, który ustala potencjał równy połowie tego napięcia.
Montaż i uruchomienie
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 25×30 mm, a jej schemat wraz z rozmieszczeniem elementów został pokazany na rysunku 3.
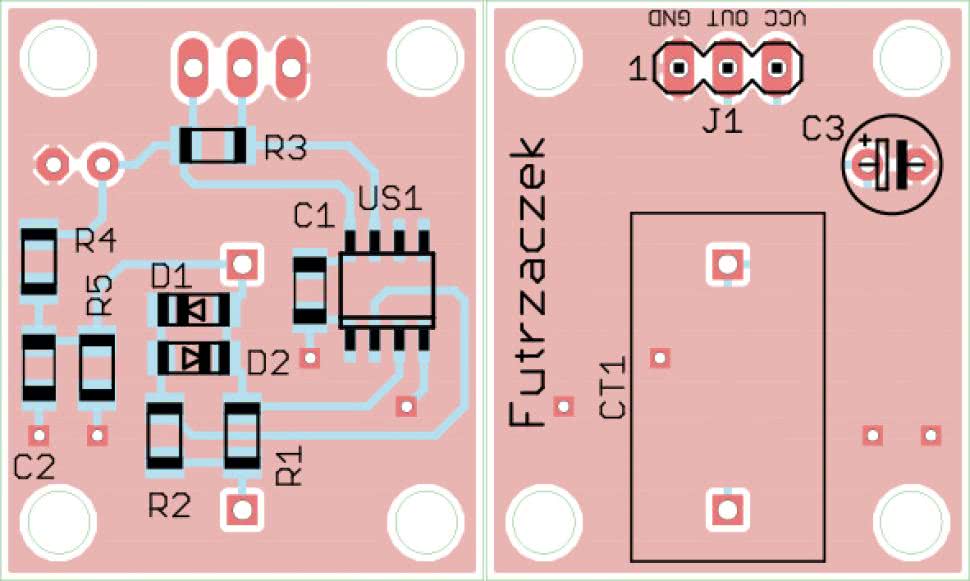
Montaż należy przeprowadzić w typowy sposób, zaczynając od elementów SMD i na THT kończąc. Prawidłowo zmontowany układ nie wymaga jakichkolwiek czynności uruchomieniowych i jest od razu gotowy do działania. Średni pobór prądu zależy od napięcia zasilającego i wynosi zaledwie kilka miliamperów.
W razie konieczności nadzorowania przewodu zasilającego, przez który płynie prąd o większym natężeniu, można użyć przekładnika o innej przekładni, np. AX-1500.
Michał Kurzela, EP
- R1, R2: 100 Ω SMD1206
- R3…R5: 10 kΩ SMD1206
- C1, C2: 100 nF SMD1206
- C3: 22 µF/35 V
- D1, D2: 1N4148 MiniMELF
- US1: LM311 SO8
- CT1: AX-0750 (opis w tekście)
- J1: goldpin 3 pin 2,54 mm THT męski